






 虽然1+1=2看似简单,但其背后的数学逻辑却难以证明。本文探讨了陈景润对于哥德巴赫猜想的部分证明,并介绍了利用皮亚诺公理证明1+1=2的尝试。
虽然1+1=2看似简单,但其背后的数学逻辑却难以证明。本文探讨了陈景润对于哥德巴赫猜想的部分证明,并介绍了利用皮亚诺公理证明1+1=2的尝试。
1+1等于几,这几乎小学一年级都可以脱口而出的数学题,为什么证明这个关系成立,耗尽所有数学家的毕生心血,都无法去证明呢?
我们都知道,1+1=2,是最简单的数学公式,其次才有1+2=3,1+3=4.....,种种数学等式出来。可见1+1=2是所有数学公式的基础,也是数学这么学科的根本,关于这条等式,你知道?到现在都没人能够证明。

接下来为大家讲解下,这个公式有何难解之处。
1. 都说陈景润证明了(1+2)但是还没人能证明(1+1)。总觉得好奇。。
1+1=2不是我们小学就知道的吗?
没经过证明我们怎么就在用了呢?
1+1=2不是和1+2=3一样的证明方法吗?
2. 首先你要知道。陈景润证明的是“哥德巴赫猜想”相关的问题。
哥德巴赫猜想是一个叫哥德巴赫的数学家提出的,大概是说:任何一个大于2的偶数都能分解成两个素数之和。
比方说8=3+5,26=19+5……
素数是指该数只能被1和它本身除尽。比方7,11,19。
现在这个命题还没有得到证明。但是通过计算机的高速运算,人们可以计算出直到很大很大的数字上,这个命题都是正确的。它应该就是正确的。
很早以前,外国人就证明了任何一个大于X(X应该不会很大)的偶数都能分解成一个素数与7个素数乘积的和。人们把这个表示成(1+7)
后来慢慢有人能证明一个大偶数能分解成一个素数与6个素数乘积的和(1+6);一个素数与5个素数乘积的和(1+5)……。
再后来,我国的陈景润证明了任何一个大偶数都能分解成一个素数与2个素数乘积的和,这就是人们常说的(1+2)。比方18=3(3*5);30=5+(5*5)。

3. 同理可证,要证明1+1=2,要用到要用皮亚诺公理才能证明,关于0的定义和1的定义。
关于这一点的思考要充分,这本是一个非常自然的数,但在数学强调逻辑的里面,数字的开端无疑像宇宙大爆炸的基点一样。
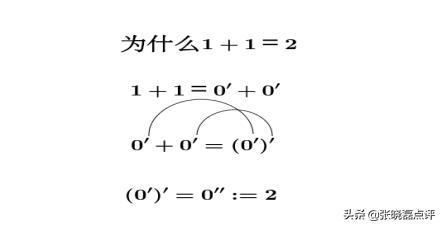
皮亚诺公理基本上雏形是有了:数字的开端都为零,两个零相加按照数学逻辑也会等于2。
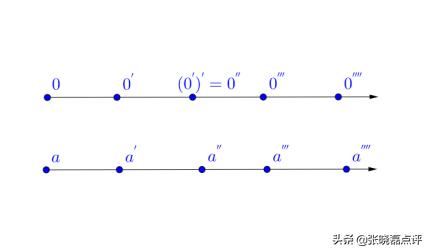
公理1:0是自然数。
公理2:每一个确定的自然数 ,都有一个确定的后继数 , 也是自然数。
公理3:0不是任何自然数的后继数。
公理4:不同的自然数有不同的后继数。
先证明这4条公理成立。
接下来开始证明1+1=2
但是,此结果,并不能证明1+1=2,只能证明另两个自然数相加,满足前4条公理的情况下,等式才成立。
不知道各位怎么看待这个问题,欢迎大家留言讨论。

















 7895
7895

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









