





各位同学大家好,自从上期智能车的介绍过去很久了,今天终于又能和大家见面了,这次介绍以后,大家就能自己尝试着开始组装一个了,是不是很期待呢。
智能避障车的原理其实相当简单,就是通过超声波的反馈测算距离,然后做出相关简单的躲避动作。知道了原理之后,硬件的构造自然就要基于他的原理进行。我们先准备好相关材料:
智能车底盘一块。之后所有的硬件都要基于这个平台组装。这里为了方便搭建,准备了现成的材料。

减速电机:在上一篇介绍中已经说过电机的原理,这次我们要把电机组装好。电机上自带有2个轴,一个轴是用于直接连接轮胎的,另外一个轴是用于测速的。因为这次我们制作的智能车不需要调速,所以测速轴就不使用了。
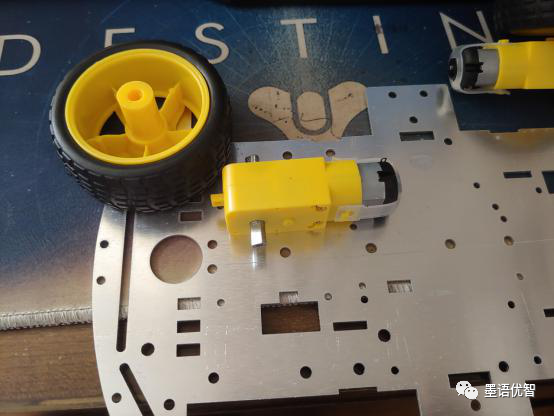
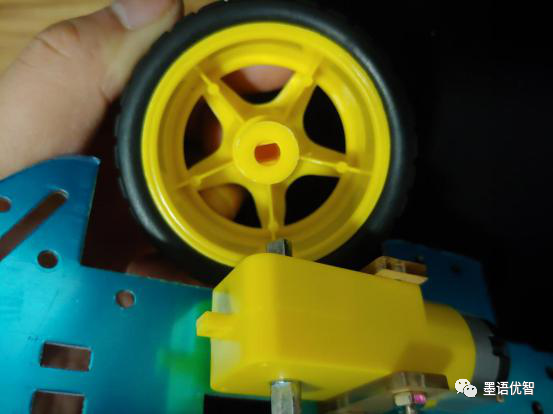
如下图我们对准孔位,将轴用力压进轮胎的孔里。注意是压进去,因为轮胎与轴之间的间隙很小,需要用较大的力才能压进孔内。同样的另外一个轮子也是这么安装。安装完以后再将轮子取出备用,这样做的原因是因为后面将电机固定到平台上时必须先取下轮胎才能安装电机,否则是没有办法拧螺丝的。在安装之前就先将孔位扩大一下的话,后续再安装轮胎会轻松很多。

这次我们制作的是两轮驱动小车,所以第三个轮子使用万向轮作为支撑。拿出底盘附送的铜柱和螺丝,将万向轮像这样固定在平台上。

固定好之后我们接下来就需要把电机固定到底盘上了。同样的底盘配送了用于固定电机的配件。动手能力强的同学可以试着自己尝试固定。
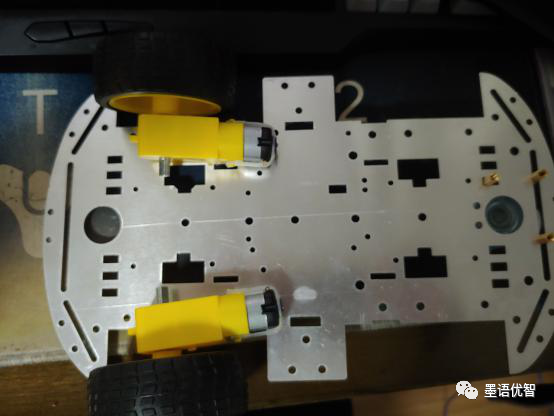
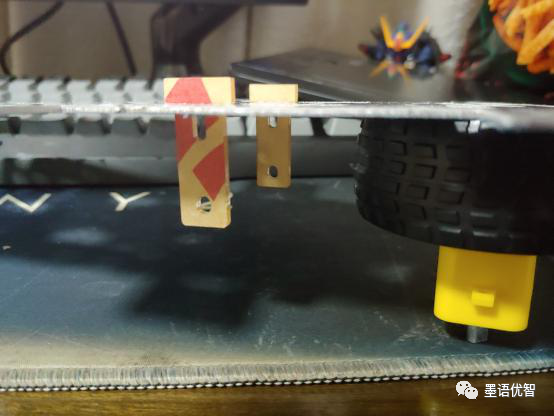
电机的安装顺序如下图,两个电机的电极都是朝向底盘内侧的。
固定件如下图,在电机上有两个预留的孔位,用长螺丝穿过孔位,再用螺母将电机与固定件锁死。
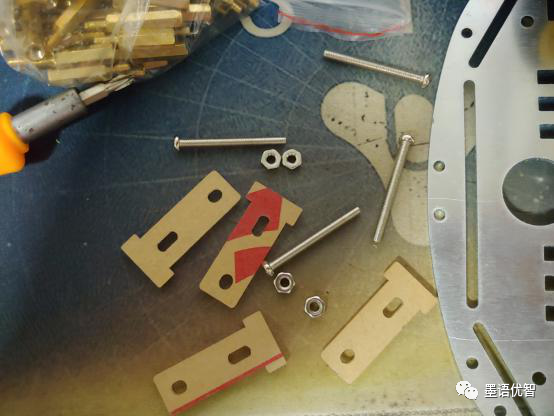
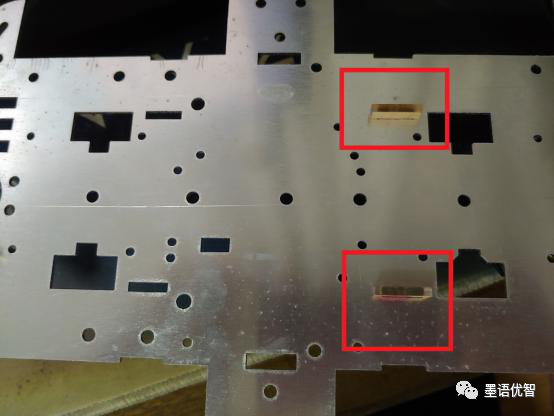
图片展示了内侧固定件安装顺序与位置,注意看红框框出的地方:
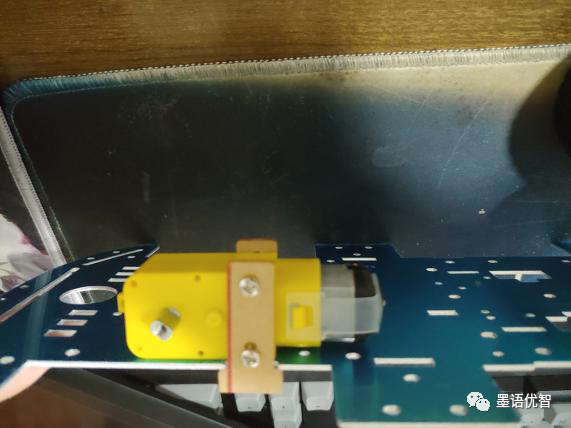
接下来安装电机和外侧固定件,如图,请看好固定件安装的方向和位置:

如下图,最后安装完成的底盘就是这样子:

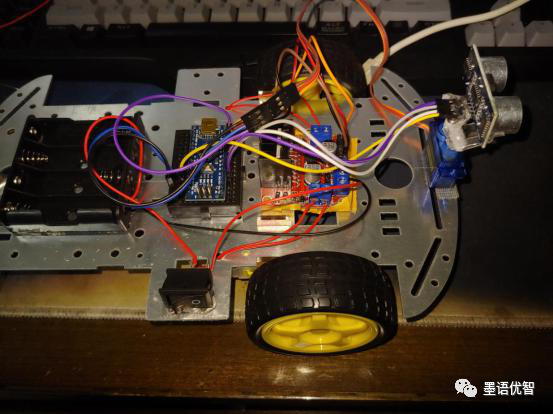
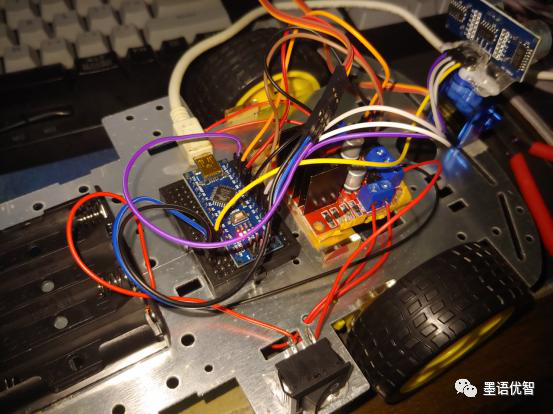
安装好底盘以后,我们就可以把各种模块放置固定到底盘上了,底盘的安装顺序一般是超声波和舵机安装在车头,电机驱动靠前,Arduino主控板在中间,电池盒安装在靠车尾的地方。
接下来便是最重要的一步了,将模块与Arduino板进行连接,这里需要用到杜邦线,面包板的孔位与杜邦线是完全兼容的,拔插都非常简单,免去了焊接的麻烦,也方便调试,毕竟新手第一次尝试也是很容易遇到接线不对的情况的。
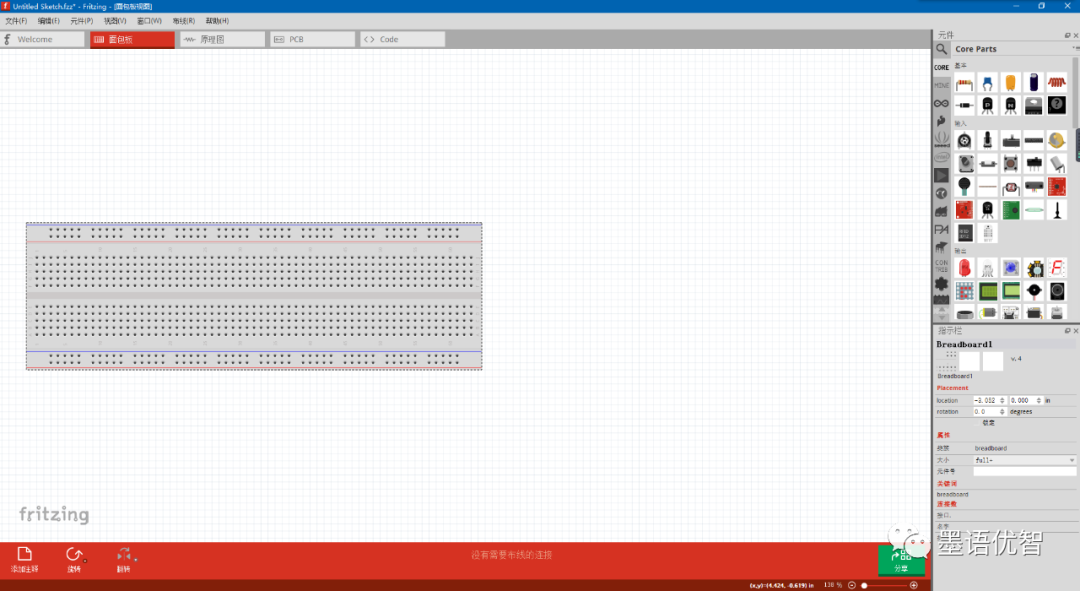
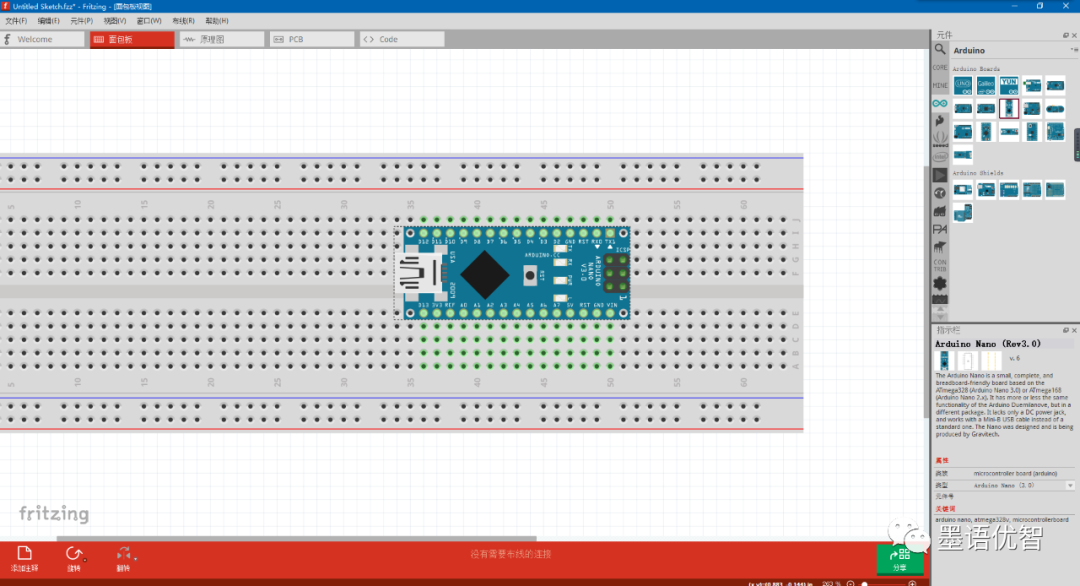
这里我推荐大家使用一个叫做fritzing的软件,这个软件是专门为了arduino主板而设计的电路图画图软件,当然如果是熟手的话可以选择直接在纸上画电路图或者直接接线,新手我还是很推荐使用frtzing画图的,很直观也很容易上手。
下图就是fritzing的软件截图,中间是绘画区域,可以在上面任意放置元件与导线,右边区域是各种兼容arduino主板的元件,可以直接搜索元件的型号找到对应的元件。
我们先点选右侧元件区域arduino的logo选项,找到arduino nano板,然后像这样拖放到面包板上,这样就把元件“安装”好了。
基本操作就是这样,下面我们看已经画好的连线图,然后按照连线图进行接线,这样对新手可以说是友好很多了。
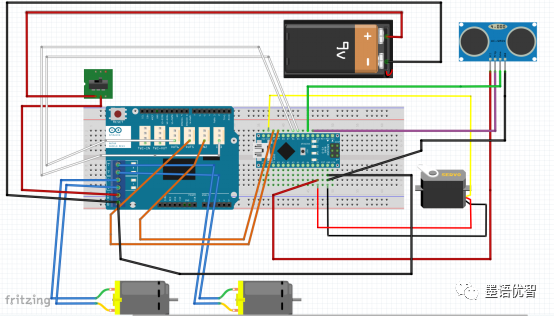
在arduino电路实验中,我们统一将电源线设置为红色,地线设置为黑色,方便区分信号线与电源的连线。首先看到这个图的右上角是超声波模块,其中超声波模块的绿线与紫线在超声波模块上的定义是信号线,因此需要直接通过面包板连接到Arduino nano板的数字针脚上(关于nano板以及元件之间的连接我们会在后续推文中详细介绍),而一般传感器之类的元件需要的工作电流很小,所以后面的连线,即电源线与地线可以直接连接到arduino nano的5V与GND针脚就可以驱动传感器元件工作了。
左下角的舵机模块的黄线是信号线,作用是让舵机从Arduino nano板获取角度数据,然后舵机电机驱动舵盘转动到指定的角度。同样的我们将舵机信号线也连接到数字针脚。
左边最大的模块便是L298N了,因为Fritzing软件中与我们购买的模块设计有所不同,此处用其它模块代替,但是接线方式还是一样的,我在网上找了一张L298N的接线示意图:
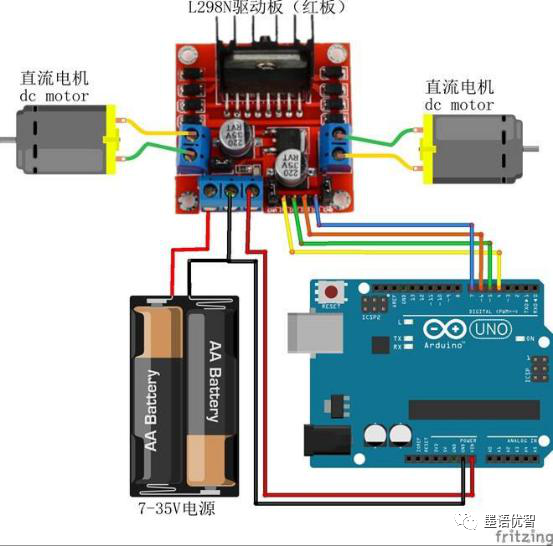
如图所示,L298N一共有4个电机针脚,4个电机控制针脚(连接到Arduino nano板,图中是Arduino uno板),3个电源针脚(左侧电源针脚是12v,给电机供电,右侧电源针脚为5V,给Arduino主板供电,中间为地线)。
按照画好的接线图连接好以后,电机的连线就算是完成了。需要注意的是电机的接线需要焊接。到此智能小车的硬件部分就算是组装完成,接下来便是上传程序,让它真正跑起来啦。
Arduino与电脑通信的方式是通过USB模拟串口进行数据通信的,我们拿出一根miniUSB线,一头接到nano板,一头接到电脑的USB接口,然后打开电脑上的Arduino程序,界面如下图:
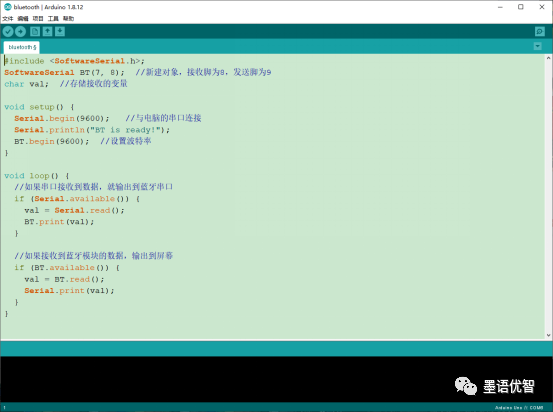
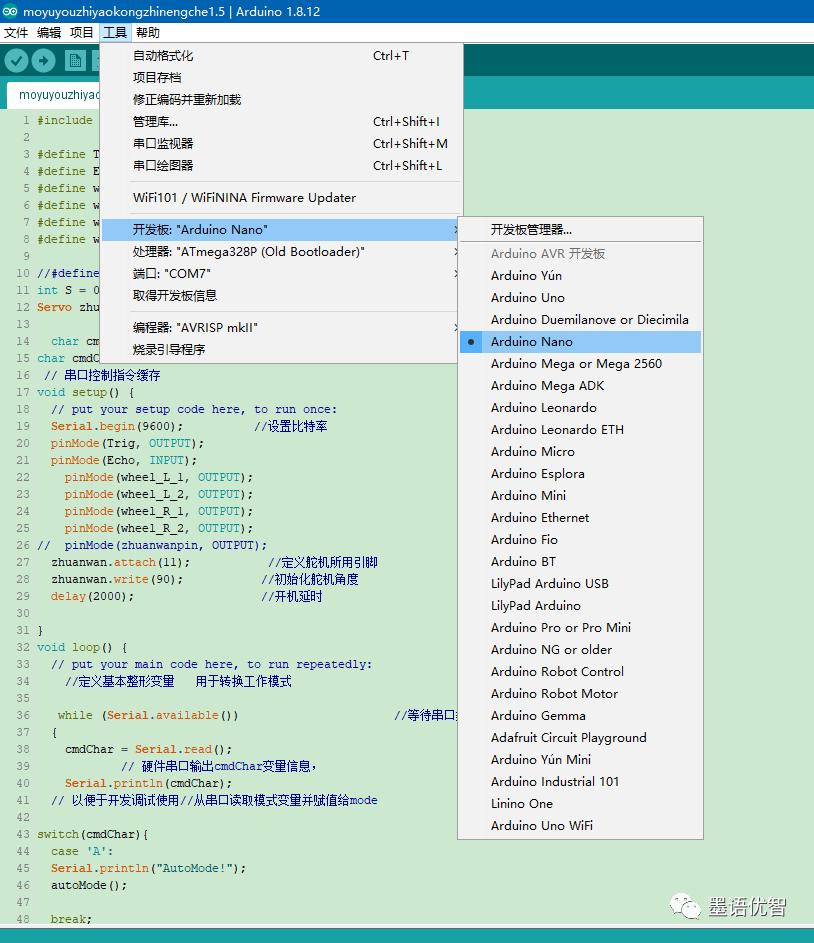
我们依次选择界面工具栏上的“工具-开发板-Arduino nano”,“工具-处理器-ATmega328p(Old bootloader)”,”工具-端口-你自己连接的端口“。设置好这些参数之后,点击左上角的箭头图标进行程序上传,在界面下方会显示上传的进度,当出现下图的进度时表明程序上传完成。拔掉USB线,给车子装上电池,然后测试。虽然L298N可以直接输出5V电压给nano板使用,但是为了程序运行稳定,一般都会使用单独的5V电源供电,这里我们直接使用充电宝为nano板供电,方便快捷。
最终小车运行效果如下:
现在小车已经可以在地上愉快地跑起来啦。大家肯定对程序是如何来控制小车做出各种操作很感兴趣,下一篇文章我们将会一起来讨论程序的功能,敬请期待。















 1947
1947











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









