






1、 HPS GPIO原理
1、功能方块图
linux内核是通过Linux内核memory-mapped device驱动访问GPIO控制器的寄存器而控制HPS端用户的LED和KEY的。memory-mapped device驱动允许应用程序访问系统所有外设寄存器物理地址空间,包括GPIO控制器物理地址。GPIO 控制器的行为通过器寄存器来控制。应用程序通过内存映射设备驱动访问GPIO1控制器的寄存器。工程方块图如下:

2、GPIO接口图
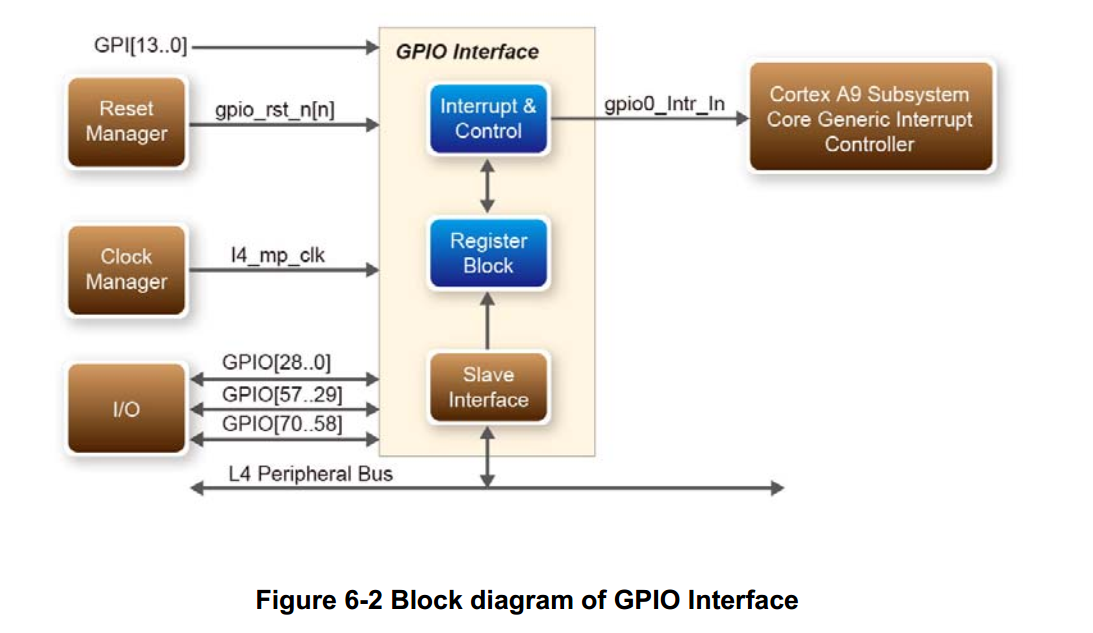
HPS 提供了三个通用 I/O(GPIO)接口模块。 下图 是 GPIO 接口的方块图(图片截至DE1-SoC_v.3.1.3_HWrevC_revD_SystemCDUserManual)。GPIO[28..0]被 GPIO0 控制器控制;GPIO[57..29]被 GPIO1 控制器控制;GPIO[70..58]和input-onlyGPI[13..0]被 GPIO2 控制器控制。
3、GPIO寄存器组
I/O 组引脚的行为是由 GPIO 控制器中对应的寄存器组所控制(参考Cyclone V系列中文手册第三卷22通用IO接口)。在这个例程中,只使用了 GPIO 控制器的三种 32-bit 寄存器:
gpio_swporta_ddr: 配置 IO 引脚方向
gpio_swporta_dr: 写数据到输出引脚
gpio_ext_porta: 从输入引脚读数据
对于LED 控制,我们通过 gpio_swporta_ddr 寄存器配置 LED 引脚为输出引脚并且通过gpio_swporta_dr 寄存器控制其输出高低电平。在 gpio_swporta_ddr 寄存器中,32bitsdata 的第一位(影响最小的位,LSB) 控制相应 GPIO 控制器的第一个 I/O 引脚的方向,第二位控制相应 GPIO 控制器第 2 个 I/O 引脚的方向,以此类推。在寄存器 bit 设定“1”则相应 I/O 方向设定为输出,设定“0”则为输入。
gpio_swporta_dr 寄存器 data bit 和 I/O 的对应关系,和 gpio_swporta_ddr 一样,是最低位对应着 I/O 的最低位。在相应 bit 写入“1”对应 I/O 输出高电平,写入“0”对应 I/O 输出低电平。
用户 KEY 的状态可以通过读取 gpio_ext_porta 寄存器来查询。寄存器 data bit 和 I/O的对应关系,和 gpio_swporta_ddr 一样,是最低位对应着 I/O 的最低位。寄存器 bit读值"1"说明相应 IO 输入状态为高电平,读值"0"则是低电平。
4、 GPIO 寄存器地址映射
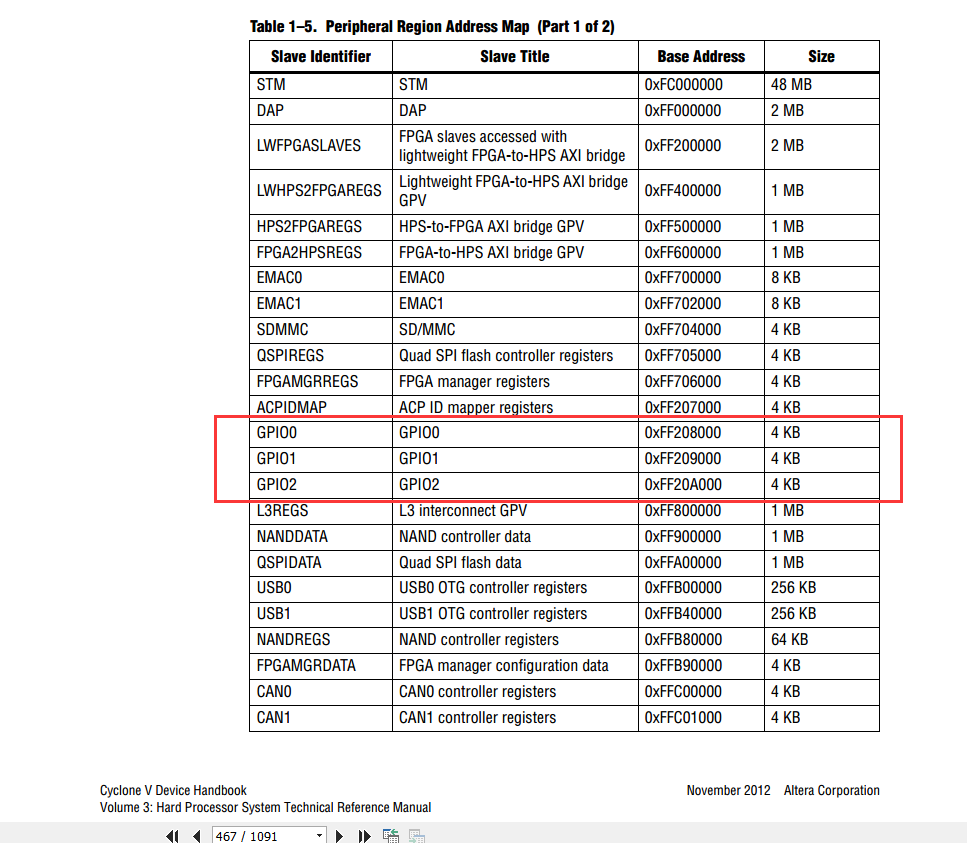
如图所示(图片截至Cyclone V系列中文手册),HPS 外设映射到 HPS 基地址 0xFC000000 上,共 64MB 的寻址空间。GPIO0控制器的寄存器映射到基地址 0xFF708000 共 4KB 寻址空间,GPIO2 控制器映射到基地址 0xFF70A000 共 4KB 寻址空间。
5、 软件API(软件程序可以直接从de1_soc_trainingde1_soc_traininglabSWde1_soc_sw_lab2中找到,但这里还是做一个简要介绍以及不同版本的一些问题)
用户需要通过如下API访问GPIO控制器的寄存器:
open:打开内存映射设备驱动。
mmap:映射物理地址到用户空间。
alt_read_word:从指定寄存器读取一个值。
alt_write_word:写一个值到指定寄存器。
munmap:清除内存映射。
同样可以通过宏指令来访问寄存器:
alt_setbits_word:设定指定寄存器的指定位为1.
alt_clrbits_wod:设定指定寄存器的指定位位0.
包含以上API的头文件为:
#include
#include
#include
#include
#include "hwlib.h"
#include "socal/socal.h"
#include "socal/hps.h"
#include "socal/alt_gpio.h"
6、LED和KEY控制
可以在DE1-SoC_v.3.1.3_HWrevC_revD_SystemCDSchematic中查看开发板原理图知道,HPS_GPIO54和HPS_GPIO53分别连接的是HPS_KEY 和HPS_LED.如下图所示:

这两个引脚都是被 GPIO1 控制器控制,同样它还控制着HPS_GPIO29~HPS_GPIO57。
下图是gpio_swporta_ddr寄存器,bit-0 控制着 HPS_GPIO29 的方向。bit-24 控制着 HPS_GPIO53 的方向,这个引脚连接着 HPS_LED;bit-25 控制HPS_GPIO54 的方向,这个引脚连接 HPS_KEY。其它引脚以此类推。总言之,GPIO1 控制器的寄存器 gpio_swporta_ddr 的 bit-24,bit-25 控制 HPS_LED,HPS_KEY 的方向。相似的,HPS_LED 的输出状态是通过 GPIO1 控制器的 gpio_swporta_dr 的 bit-24 控制的。HPS_KEY 的状态则可以通过查询读取 GPIO1 控制器的 gpio_ext_porta 寄存器的 bit-25。

下面是相关寄存器定义和配置程序:
#define USER_IO_DIR (0x01000000)
#define BIT_LED (0x01000000)
#define BUTTON_MASK (0x02000000)
下列程序用来配置LED为输出引脚:
alt_setbits_word( ( virtual_base + ( ( uint32_t )( ALT_GPIO1_SWPORTA_DDR_ADDR ) & ( uint32_t )( HW_REGS_MASK ) ) ), USER_IO_DIR );
下列语句可以点亮LED
alt_setbits_word( ( virtual_base +( ( uint32_t )( ALT_GPIO1_SWPORTA_DR_ADDR ) &( uint32_t )( HW_REGS_MASK ) ) ), BIT_LED );
如下语句可以用来读取
alt_read_word( ( virtual_base + ( ( uint32_t )( ALT_GPIO1_EXT_PORTA_ADDR ) & ( uint32_t )( HW_REGS_MASK ) ) ) );
7、创建工程文件
整个main.c函数文本如下:
#include
#include
#include
#include
#include "hwlib.h"
#include "socal/socal.h"
#include "socal/hps.h"
#include "socal/alt_gpio.h"
#define HW_REGS_BASE ( ALT_STM_OFST )
#define HW_REGS_SPAN ( 0x04000000 )
#define HW_REGS_MASK ( HW_REGS_SPAN - 1 )
#define USER_IO_DIR (0x01000000)
#define BIT_LED (0x01000000)
#define BUTTON_MASK (0x02000000)
int main(int argc, char **argv) {
void *virtual_base;
int fd;
uint32_t scan_input;
int i;
// map the address space for the LED registers into user space so we can interact with them.
// we'll actually map in the entire CSR span of the HPS since we want to access various registers within that span
if( ( fd = open( "/dev/mem", ( O_RDWR | O_SYNC ) ) ) == -1 ) {
printf( "ERROR: could not open "/dev/mem"...
" );
return( 1 );
}
virtual_base = mmap( NULL, HW_REGS_SPAN, ( PROT_READ | PROT_WRITE ), MAP_SHARED, fd, HW_REGS_BASE );
if( virtual_base == MAP_FAILED ) {
printf( "ERROR: mmap() failed...
" );
close( fd );
return( 1 );
}
// initialize the pio controller
// led: set the direction of the HPS GPIO1 bits attached to LEDs to output
alt_setbits_word( ( virtual_base + ( ( uint32_t )( ALT_GPIO1_SWPORTA_DDR_ADDR ) & ( uint32_t )( HW_REGS_MASK ) ) ), USER_IO_DIR );
printf("led test
");
printf("the led flash 2 times
");
for(i=0;i<2;i++)
{
alt_setbits_word( ( virtual_base + ( ( uint32_t )( ALT_GPIO1_SWPORTA_DR_ADDR ) & ( uint32_t )( HW_REGS_MASK ) ) ), BIT_LED );
usleep(500*1000);
alt_clrbits_word( ( virtual_base + ( ( uint32_t )( ALT_GPIO1_SWPORTA_DR_ADDR ) & ( uint32_t )( HW_REGS_MASK ) ) ), BIT_LED );
usleep(500*1000);
}
printf("user key test
");
printf("press key to control led
");
while(1){
scan_input = alt_read_word( ( virtual_base + ( ( uint32_t )( ALT_GPIO1_EXT_PORTA_ADDR ) & ( uint32_t )( HW_REGS_MASK ) ) ) );
//usleep(1000*1000);
if(~scan_input&BUTTON_MASK)
alt_setbits_word( ( virtual_base + ( ( uint32_t )( ALT_GPIO1_SWPORTA_DR_ADDR ) & ( uint32_t )( HW_REGS_MASK ) ) ), BIT_LED );
else alt_clrbits_word( ( virtual_base + ( ( uint32_t )( ALT_GPIO1_SWPORTA_DR_ADDR ) & ( uint32_t )( HW_REGS_MASK ) ) ), BIT_LED );
}
// clean up our memory mapping and exit
if( munmap( virtual_base, HW_REGS_SPAN ) != 0 ) {
printf( "ERROR: munmap() failed...
" );
close( fd );
return( 1 );
}
close( fd );
return( 0 );
}
8、创建Makefile文件
Makefile文件如下:
#
TARGET = hps_gpio
#
CROSS_COMPILE = arm-linux-gnueabihf-
CFLAGS = -g -Wall -I ${SOCEDS_DEST_ROOT}/ip/altera/hps/altera_hps/hwlib/include
LDFLAGS = -g -Wall
CC = $(CROSS_COMPILE)gcc
ARCH= arm
build: $(TARGET)
$(TARGET): main.o
$(CC) $(LDFLAGS) $^ -o $@
%.o : %.c
$(CC) $(CFLAGS) -c $< -o $@
.PHONY: clean
clean:
rm -f $(TARGET) *.a *.o *~
9、编译文件
定好编译规则后,打开Altera Embedded Command Shell工具,cd到工程目录下:

编译过程中发现两个错误。这都是因为quartus版本不同而造成的。
错误1:
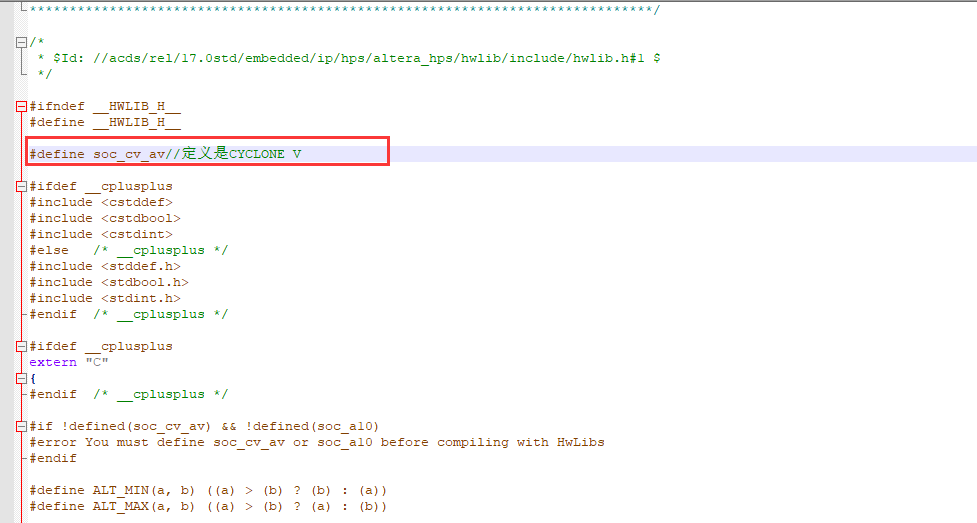
教材用的是13版本的quartus,这里我用到的是17.0的quartus II, make时提示在hwlib.h之前确认SOC—a10还是SOC—AV—cv?
解决方法:
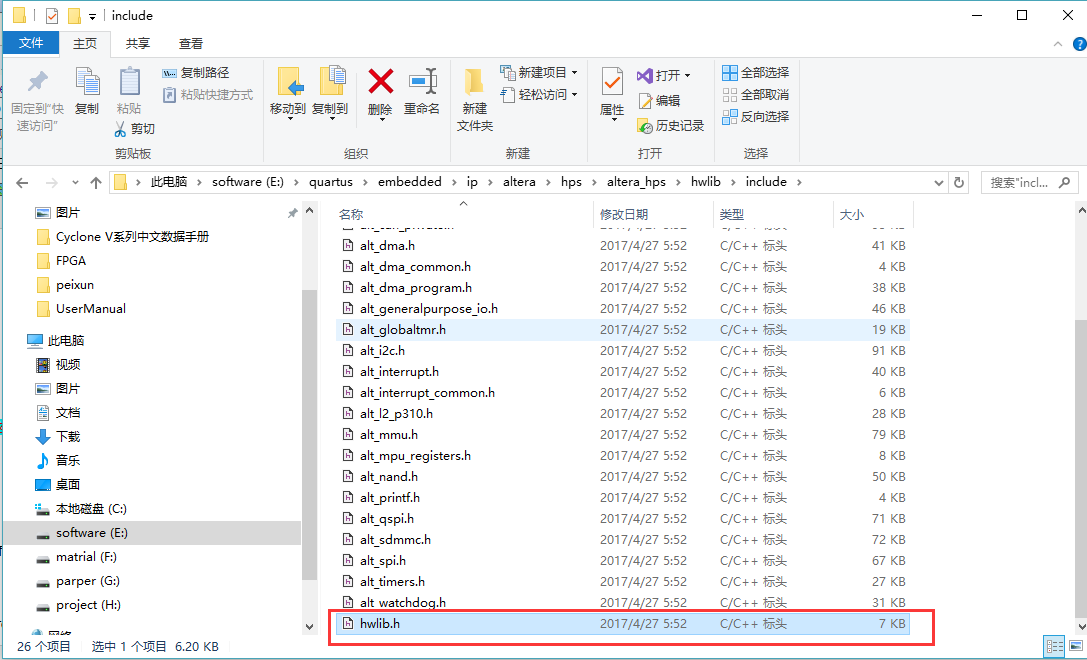
在EDS的安装路径下,找到对应的hwlib.h,加上#define soc_cv_av(因为这里用到的是cyclone V).
增加定义后,修改再次make 会发现第一个错误已经解决了。
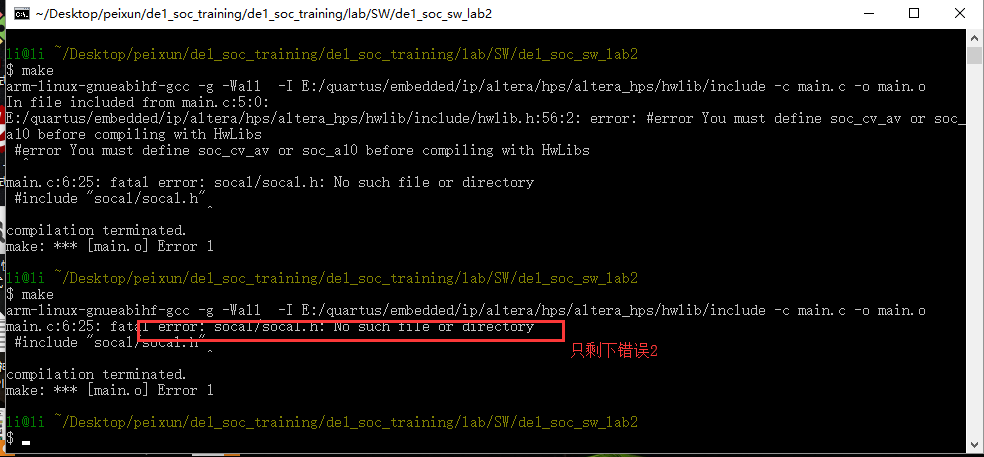
错误2:
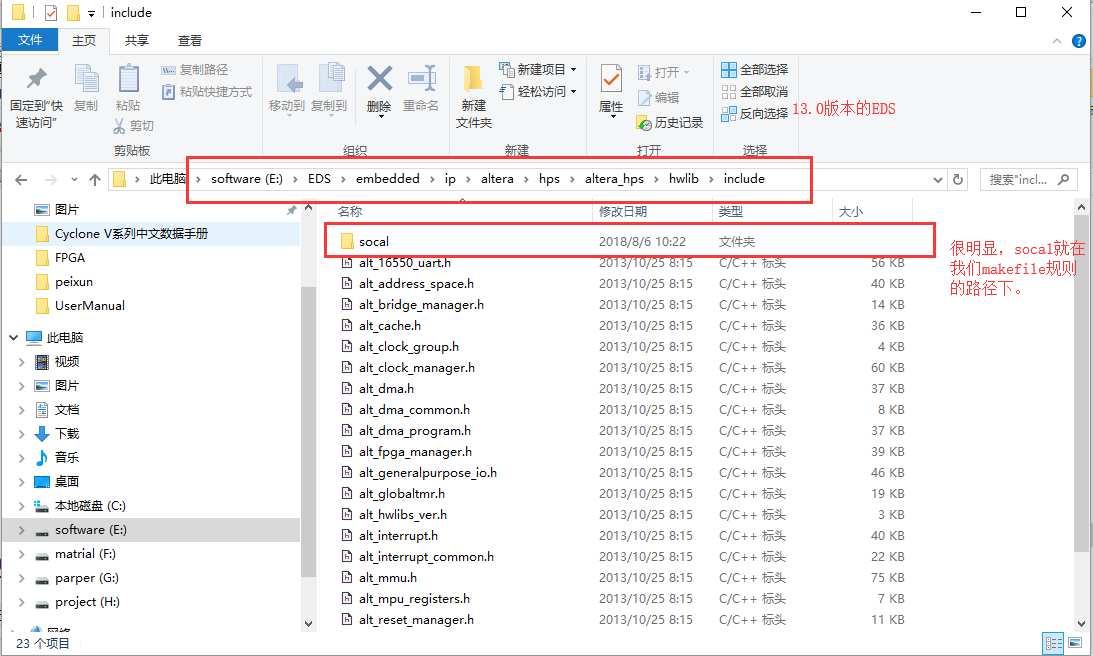
为了解决错误2,这里又重新安装了一次13.0版本的EDS,对照后发现EDS可以顺利编译,到makefile路径下观察可以发现。
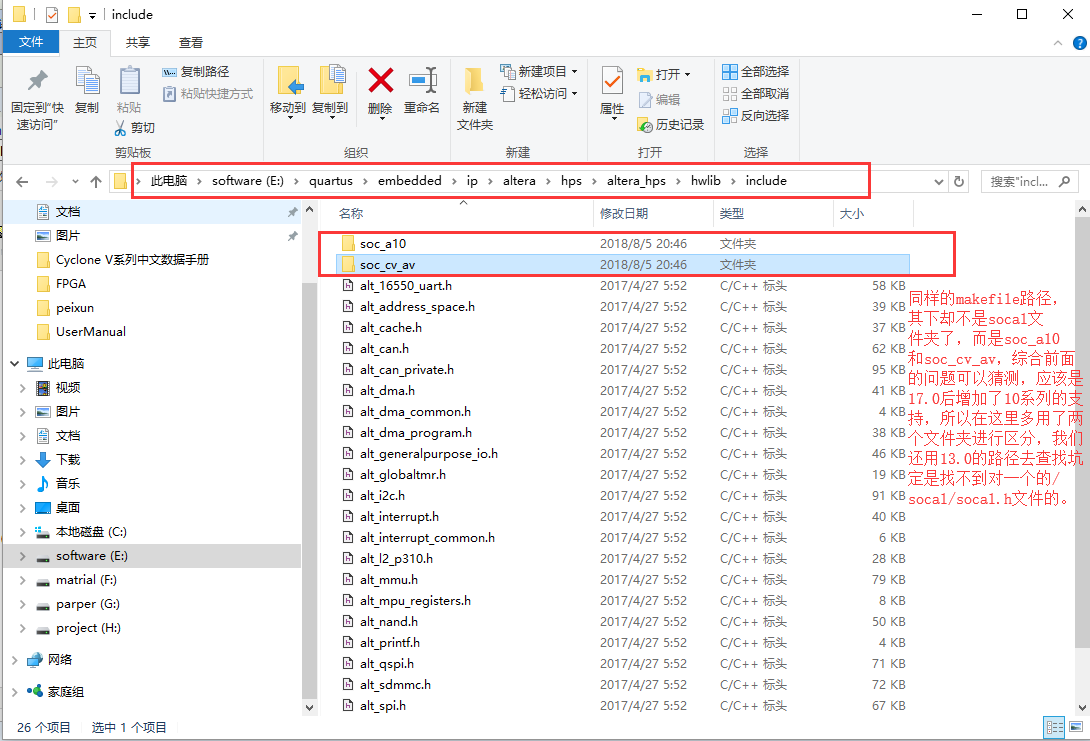
同样的,到达我安装的17.0版本下的路径观察却发现
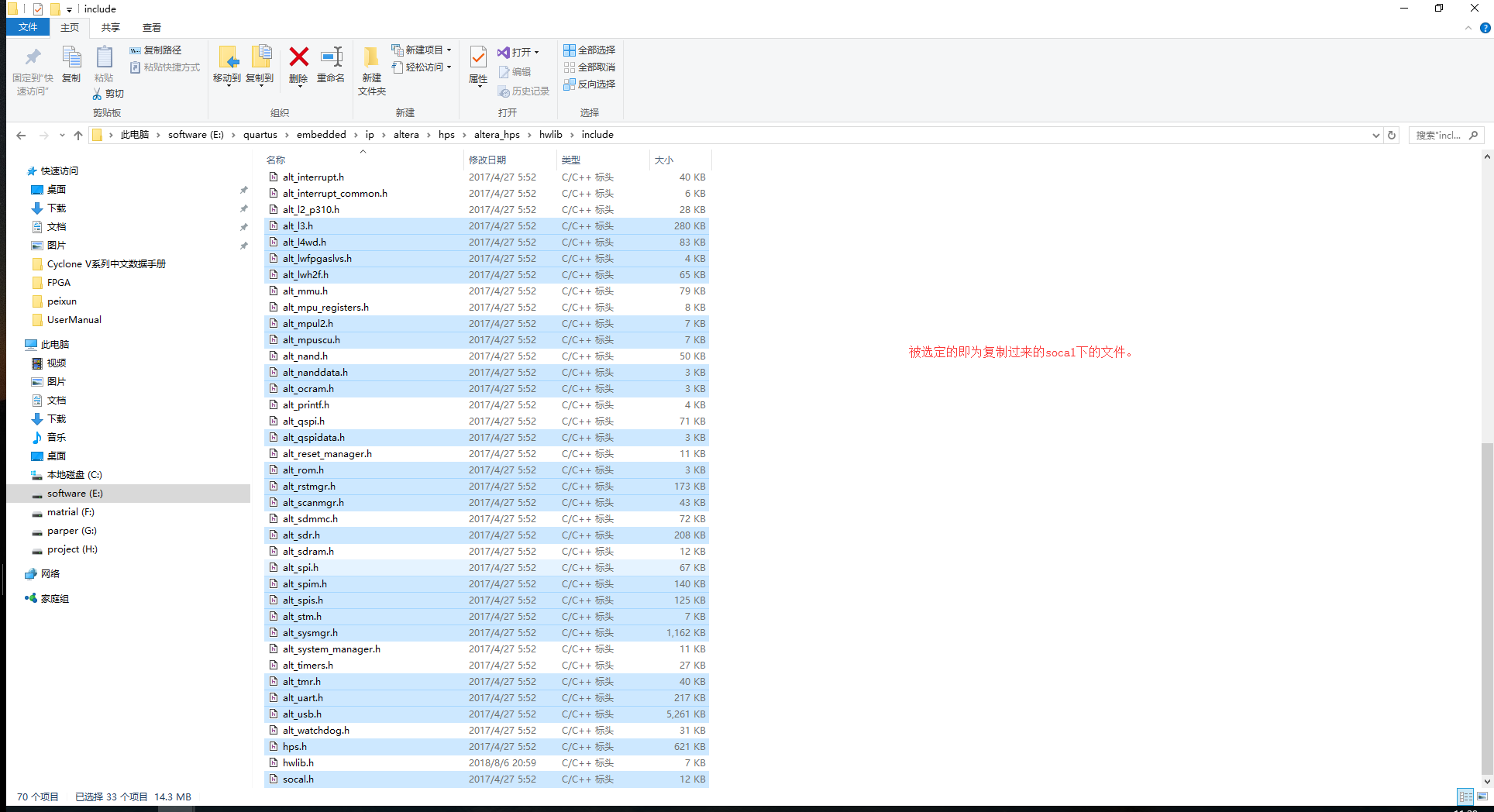
果然,点进socal_cv_av可以发现原来一样的socal文件夹:
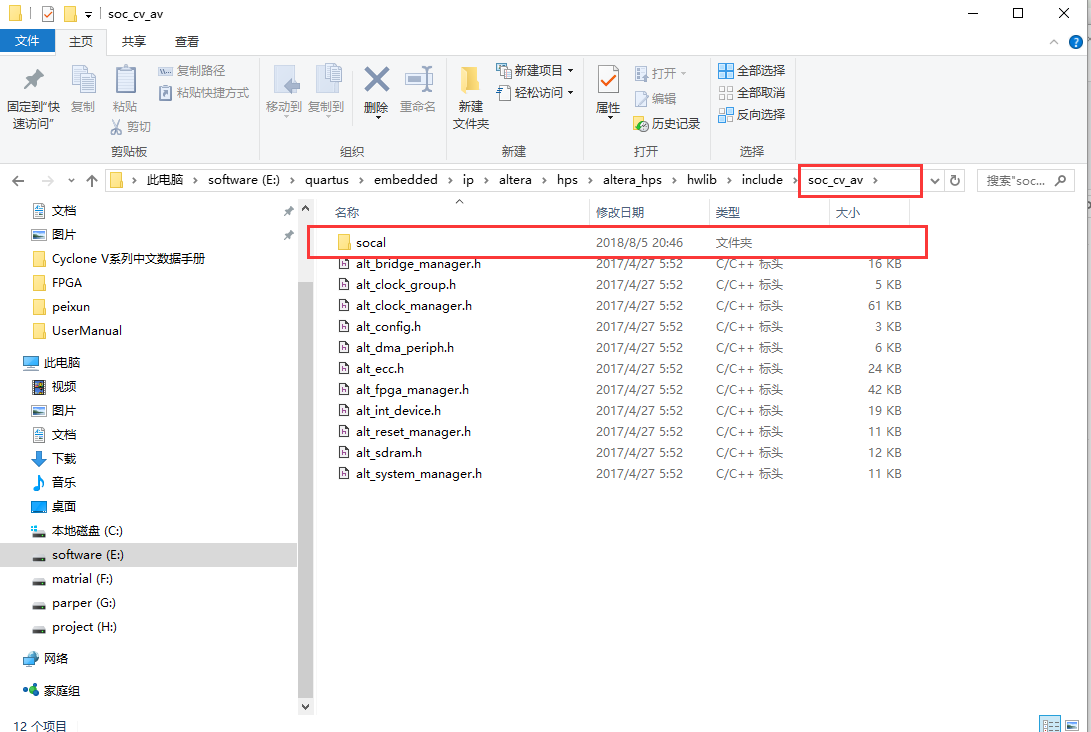
解决方法:
问题找到了,解决方法也就有了,最简单的方法是,将soc_cv_av以及socal下的所有文件复制到include界面下
并修改头文件为:
#include
#include
#include
#include
#include "hwlib.h"
#include "socal.h"
#include "hps.h"
#include "alt_gpio.h"
即可, 此时再重新编译即可得到可执行文件。

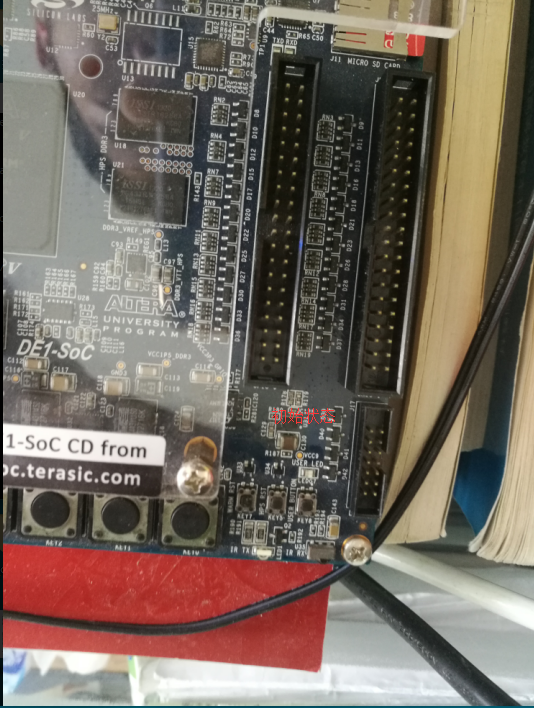
10、运行结果
通过SSH或者U盘将文件传送到FPGA后(嵌入式系统软件设计),再串口端修改文件可执行属性如下:
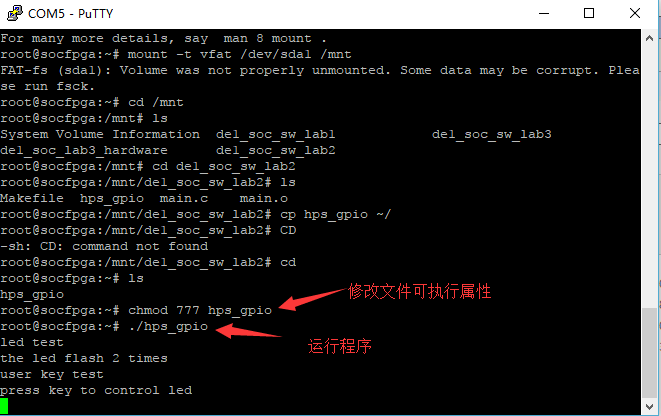
运行程序后,可以看到FPGA闪烁两次,然后熄灭,按下HPS_KEY按键,LED会点亮。ctrl+c终止程序后,现象消失。
















 256
256











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









