







 本文探讨了协作机器人的安全性与易用性,指出安全性是人机协作的前提,易用性是其迅速发展的关键。协作机器人在中小企业中得到广泛应用,具有低成本、安全、灵活的特点。王珂博士分享了协作机器人的安全规范、碰撞检测技术以及易用性的提升,包括图形化编程、拖动示教等功能,并讨论了软件平台化对未来协作机器人发展的影响。
本文探讨了协作机器人的安全性与易用性,指出安全性是人机协作的前提,易用性是其迅速发展的关键。协作机器人在中小企业中得到广泛应用,具有低成本、安全、灵活的特点。王珂博士分享了协作机器人的安全规范、碰撞检测技术以及易用性的提升,包括图形化编程、拖动示教等功能,并讨论了软件平台化对未来协作机器人发展的影响。
前言:人机协作是协作机器人显著特点和优势,安全性则是人机协作的前提,易用性则是其迅速发展的必备条件。
编辑| 符号
整理| Sunny
机器人大讲堂直播间 045期
近年来,协作机器人发展迅猛,成为机器人研究及研发的热点之一,主要得益于其易用性、灵活性、安全性等三个方面。与传统工业机器人相比,协作机器人体现了人机协作概念,使其具有一定自主及与人协作的能力。
协作机器人将人的智力、经验与机器人的速度、力量以及准确性相结合,突破了传统工业机器人工作区域,实现人机协作在同一工作区域,使其真正成为人类合作的伙伴。人机协作是协作机器人显著特点和优势,安全性则是人机协作的前提,易用性则是其迅速发展的必备条件。
虽然协作机器人的拖动示教功能特性使其易用性大大提高,但目前市场上的一些协作机器人产品,它们提供的图形界面只能完成一些简单的拣选/取放任务,仍在易用性上存在问题。
我们特邀艾利特机器人算法研发工程师王珂博士做客「机器人大讲堂直播间」,分享协作机器人安全易用性的全新探索。
本期分享要点如下
- 协作机器人简介
- 协作机器人的安全性
- 协作机器人的易用性
- 协作机器人软件的平台化
以下内容根据王珂博士直播分享实录整理
一、协作机器人简介
在国际标准化组织工业标准ISO10218中协作区域是指机器人和人类可以同时工作的区域,那么协作机器人是指能够在协作区域内与人直接交互协作的机器人。2005年,欧盟提出了SMEs(Smalland Medium Enterprises)项目计划,旨在通过机器人技术增强中小企业的劳动力水平,降低成本,提高竞争力,避免劳动力外包,将制造业和工作机会留在欧洲。
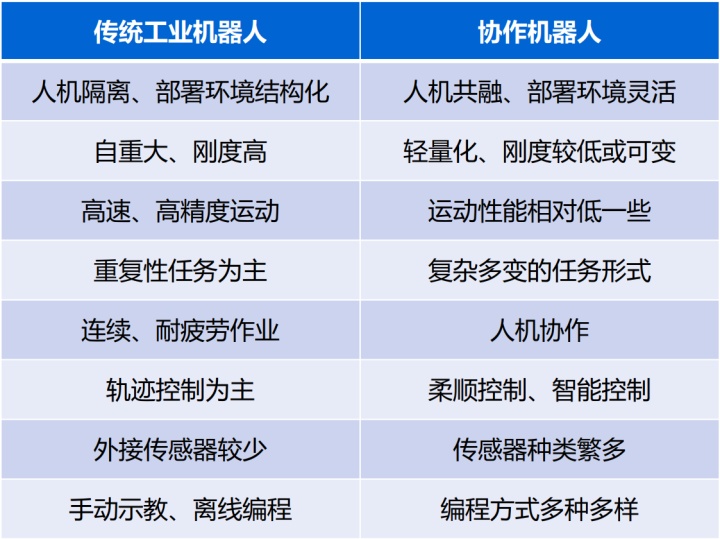
从中可以看出,中小企业具有小批量、多品种、个性化的产品制造需求,要求机器人更低成本、更安全、更易用,部署更灵活。因此,协作机器人应运而生。同传统工业机器人对比,协作机器人有着很多不同点:
国外常见的协作机器人类型:

总的来说,协作机器人产品具有三个特点:
集成部署成本较低
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 275
275











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









