







R3Det 在HRSC2016、DOTA等数据集上无论是准确率还是速率都远超其他方法。
本文转载自:AI科技评论
作者 | Bbuf 责编 | 贾伟
旋转目标检测是一项有挑战性的任务,因为难以定位多角度物体并且与背景准确和快速的分离。虽然已经取得了长足的进步,但在实际设置中,对于大宽高比,密集分布和类别不平衡的旋转目标检测仍然存在困难。
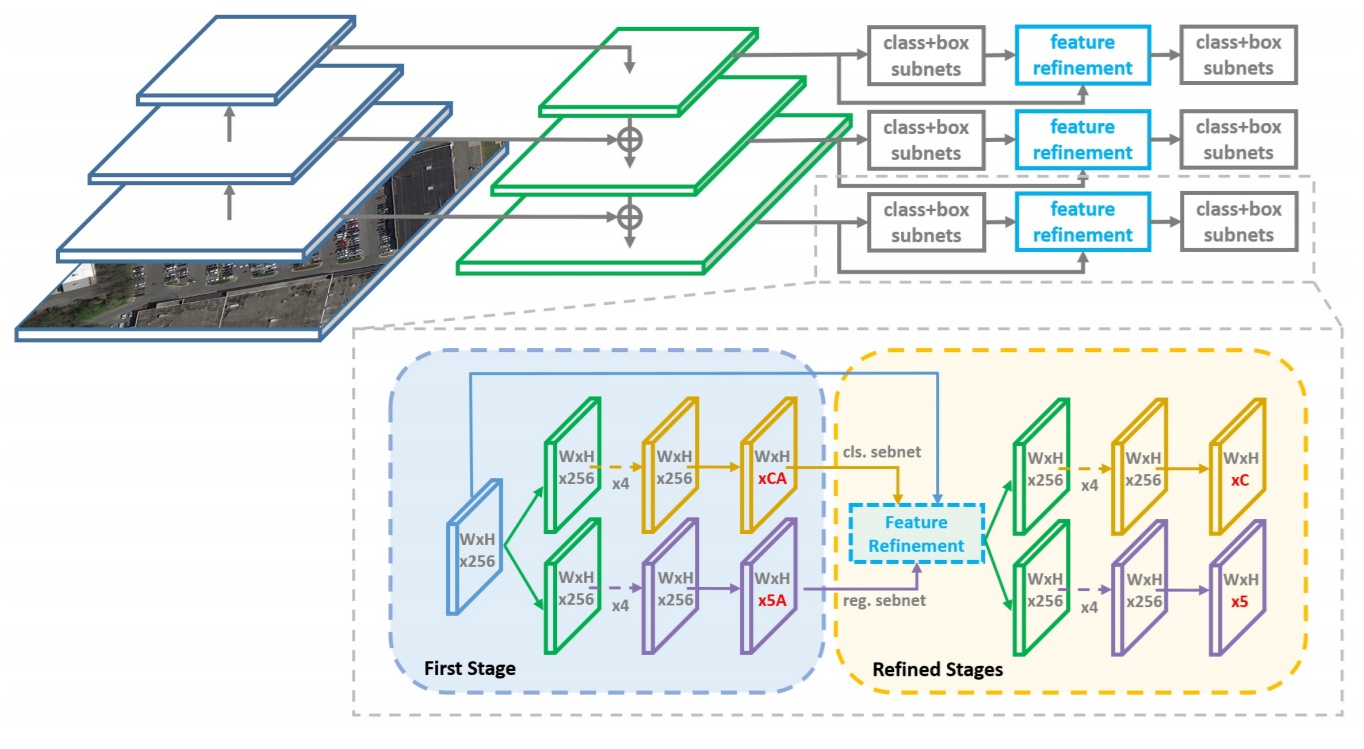
在这篇论文中,提出了一种快速,准确且端到端的的旋转目标检测器。考虑到现有精炼单级检测器的特征未对齐的缺点,这篇论文设计了一个特征精炼模块来获取更准确的特征以提高旋转目标检测性能。
特征精炼模块的关键思想是通过特征插值将当前精炼的边界框位置信息重新编码为对应的特征点,以实现特征重构和对齐。
在DOTA,HRSC2016和ICDAR2015数据集上进行的广泛实验显证明了这种算法的有效性。目前这篇论文的代码已开源,刚刚收录于AAAI 2021。
论文链接: https:// arxiv.org/abs/1908.0561 2
代码地址: https:// github.com/Thinklab-SJT U/R3Det_Tensorflow
注:文末附目标检测和遥感学习交流群
研究背景
目标检测是计算机视觉中的基本任务之一,并且已经有很多高性能的通用目标检测器被提出。当前流行的目标检测器可以分为两种:单阶段和双阶段。双阶段方法在各种基准上取得了可喜的结果,而单阶段的方法则实现了更快的检测速度。然而,当前常规水平目标检测器对于许多实际的应用具有局限性。例如文本检测和遥感目标检测,因为目标可以在任何方向和位置。
因此,在文本检测和遥感目标检测场景中已经提有很多基于一般检测框架的旋转目标检测器被提出。实际上,在文本检测和遥感目标检测领域主要面临三个挑战:
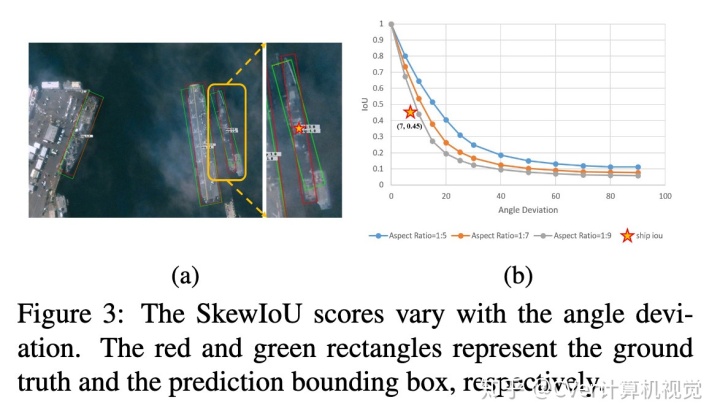
1)大长宽比:对于大长宽比的目标,SkewIOU分数对角度的变化十分敏感,如Figure3所示;
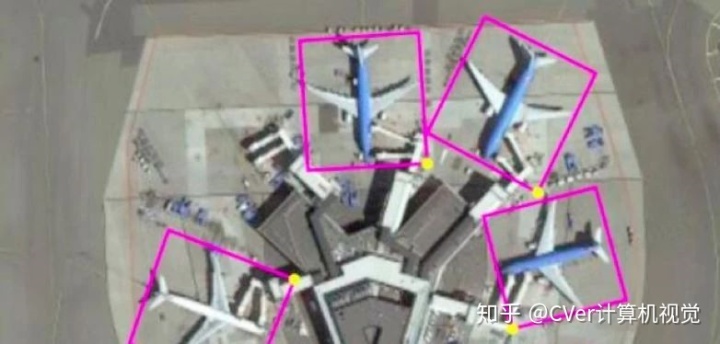
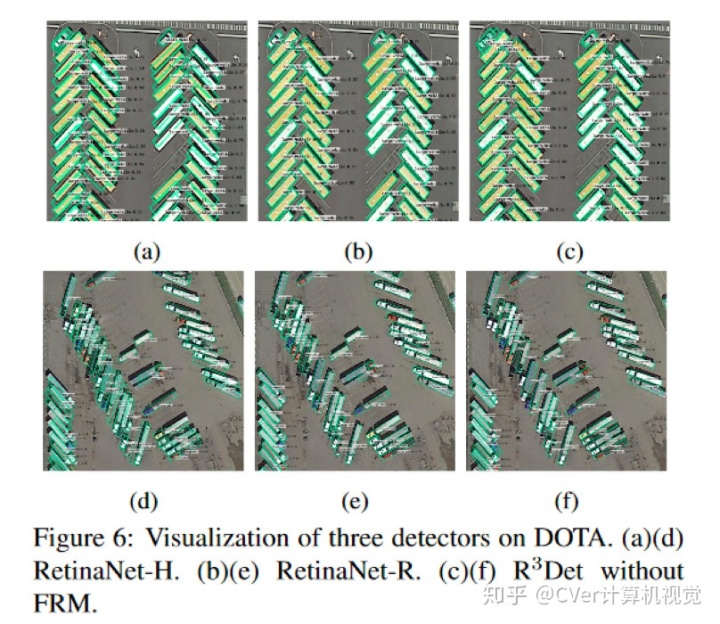
2)密集排列:如Figure6所示,许多目标通常以密集排列的形式出现;
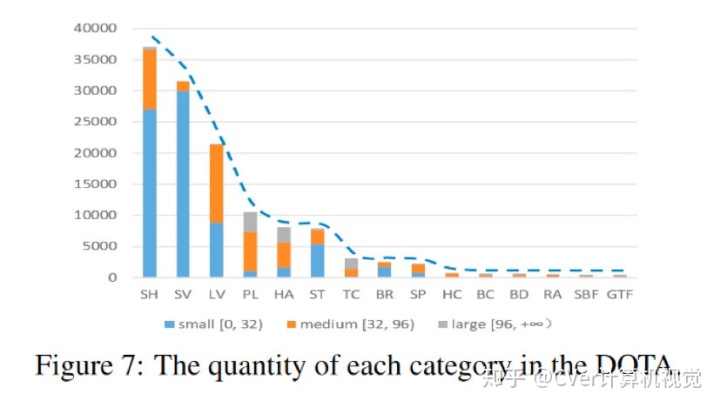
3)类别不平衡,很多多类旋转目标数据集的类别极度不平衡,如Figure7所示。
在这篇论文中,主要讨论如何设计一个精确且快速的旋转目标检测器。
为了对大长宽比的目标保持较高的定位精度和速度,论文采使用了精炼单级旋转目标检测器。
首先,论文发现旋转锚框(Anchors)可以在目标密集场景发挥更好的效果,而水平锚框可以以更少的数量实现更高的召回率。因此,在本文精炼的单级检测器中使用两种形式的锚框进行组合,即在第一阶段使用水平锚框以提高速度和产生更多候选框。然后在精炼阶段去使用旋转锚框以适应目标密集场景。
第二,论文还指出现有的精炼单级检测器存在特征未对齐的问题,极大的限制了分类和精炼阶段回归的可靠性。本文设
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2442
2442











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









