







易渊图像机器视觉产品体系:
1.易渊机器视觉基础库软件:基础库MvitSDK+应用模块库MvitEXM
2.易渊机器视觉算法流程引擎软件 VDDevelopKit
3.易渊机器视觉面阵相机通用软件 VisionDoctor
4.易渊机器视觉高速检测软件 HSInspector
5.易渊机器视觉线阵相机通用软件 LScanDoctor
6.易渊机器视觉线阵相机计数软件 LScanCounter
7.行业定制软件
易渊机器视觉面阵相机通用软件 7.0.20.1116
下载地址:
VisionDoctor_7.0.20.11116.exe :
链接:https://pan.baidu.com/s/1iUWFsLfS7MqppBz8JF7rUQ
提取码:i7lh
VisionDoctor_x64_7.0.20.1116.exe :
链接:https://pan.baidu.com/s/17eHTLeOsaA35HZIITN3myg
提取码:2b42
更新日志:
===Version 7.0.20.1116===
1. 添加Pin组内间距测量模块
用户定制模块。
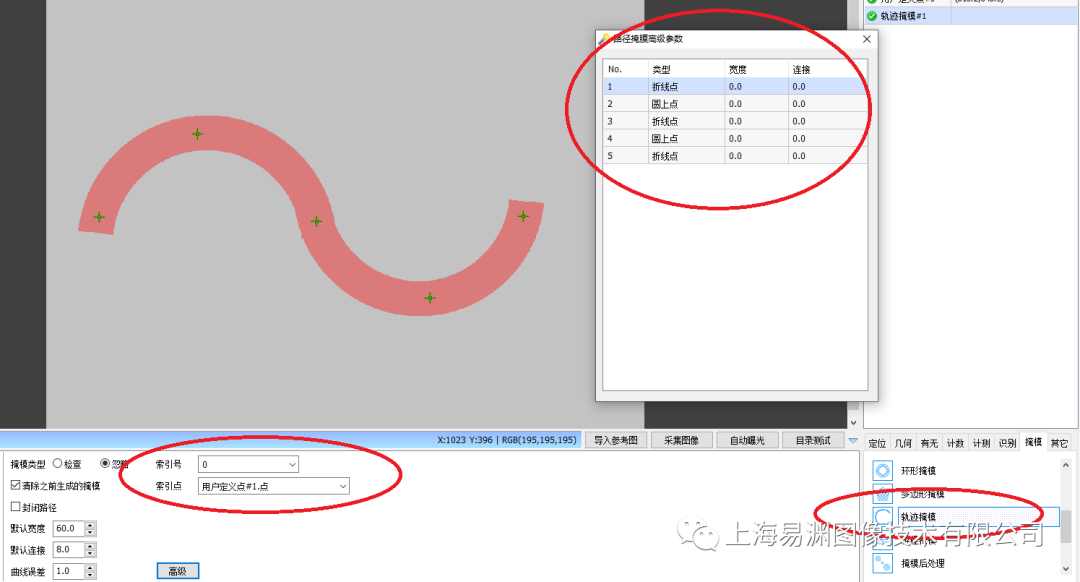
2. 添加轨迹掩模和轨迹宽度测量模块
新增轨迹掩膜模块,可以将定位、有无或者几何模块产生的一串点连接起来定义一条曲线(可以指定其中的点是直线点、圆弧点或者自由曲线点),对曲线指定宽度形成特殊形状的掩膜区域。
轨迹宽度测量模块可以将定位、有无或者几何模块产生的一串点连接起来定义一条宽度扫描轨迹(可以指定其中的点是直线点、圆弧点或者自由曲线点),根据扫描步长及分段指定的扫描范围生成一组宽度扫描线,每个宽度扫描线上扫描得到一个宽度,并判断宽度是否满足规格要求。
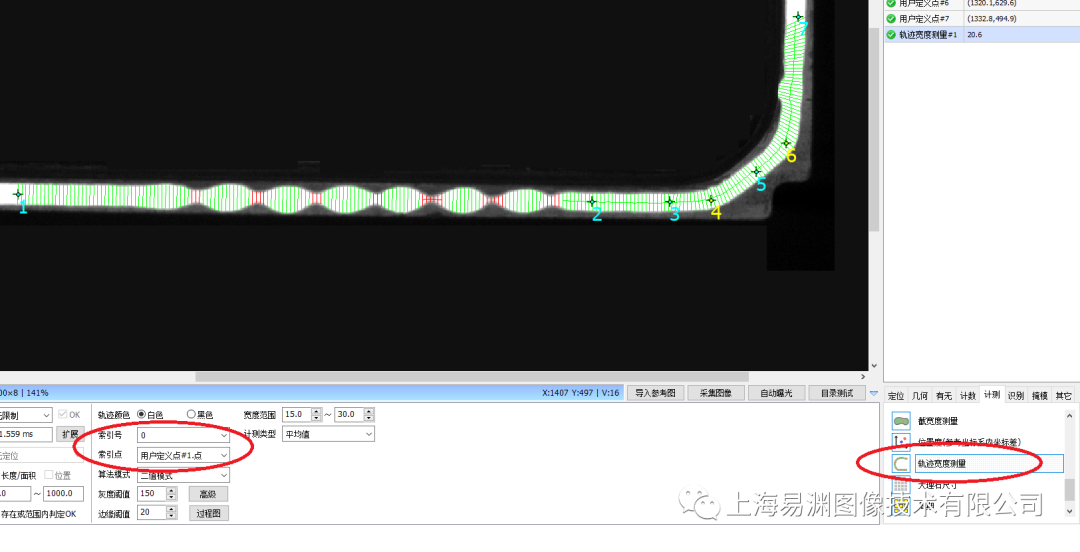
这个模块和胶路检查模块类似,区别是轨迹宽度测量的轨迹是由前序模块生成的点连接而成的。胶路检查模块中的胶路假定是不变的,以ROI的方式设置。但是某些情况下,轨迹比较随意,需要使用几何模块来计算点,然后将点连接起来生成检测轨迹。
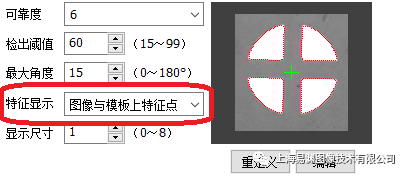
3. 优化特征定位模块(在图像上添加特征显示)
优化斑块检出模块(添加特征和位置排序、添加斑块中几何元素输出)
斑块检出支持排序,返回排序后的第一个斑块。
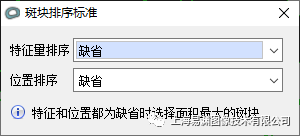
用户可以选择输出斑块中的几何元素:最大外接圆,最大外接矩形,最小内圆和最小内矩形等,供后续模块参照。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1251
1251











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









