





# 机械臂正运动学-DH参数-Python快速实现 @[toc]
前言:
最近在玩一个非常弱智的机械臂,好多功能都没有,连个配套的仿真环境都没, 虚拟边界和碰撞检测的功能都非常难用。 没办法,我只能自己实现一个简陋的虚拟边界功能,这必须要在已知关节角的情况下,提前计算出每个关节的三维坐标。 这里的问题凝结为输入输出就是: 已知: 机械臂的关节长度,关节构型
输入: 机械臂的关节角度; 输出: 机械臂的关节坐标。 全网好像没有搜到一个简单可用、基于DH参数的Python的正运动学代码(github有一个不能用)。 为了防止以后忘记,以及方便大家学习借鉴。先抛出来,供大家参考
整体思路流程:
搜集机械臂相关配置资料:关节长度、构型、官方设定的坐标系; 通过两个对应关系,找到机械臂的DH参数表; 找到了之后,代入转换矩阵T中; 连乘所有关节的T; 获取关节三维坐标。
学习资料
要想得到上面的输出,需要的基础知识比较多。 有: 1. 刚体的坐标变换; 2. DH参数; 3. 基本上就是上面两个了。
为了弄明白这个过程, 我请教了几位大佬,大佬说可以看看b站台大的机器人学,和《机器人学导论》-斯坦福的那本,自己去网上搜PDF版就好了 然后直接基本概念,大家可以去看看: 台大机器人学之运动学——林沛群(含课件+书籍)
核心概念:
我们将机械臂的每一个关节轴,都建立一个坐标系,那么从关节1到关节0的变化,其实就是做了一次刚体的坐标变换。 而关节7的末端点,则是串着做了好多次的坐标变换。
DH参数的理解。
先挂一个参考链接,这里面的介绍的更详细: https://blog.csdn.net/aic1999/article/details/82490615 上节说到本质是坐标变换,那么我们如何根据已知信息,确定好坐标变换的基本信息? 这里面就得用到一个神奇的DH参数(两位大佬名字的缩写) 来看看课本里的这张经典图。
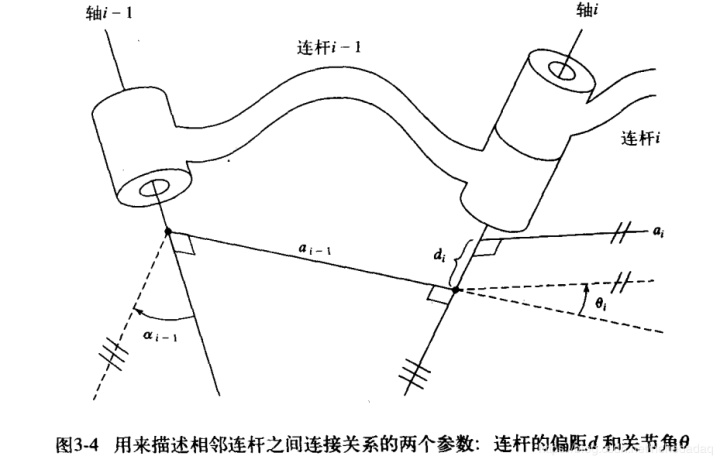
我们需要知道,决定四个轴的相对位置关系,我们可以用四个变量来描述(虽然可能不唯一,但是够了)。 那么我们需要知道的第一个对应关系:
DH参数的定义:
沿着轴方向,逆时针为正。

这里面我们还差一个东西,如何定义坐标系?
建立坐标系
其实一般如果是靠谱的机器人,这个坐标系应该是给的。

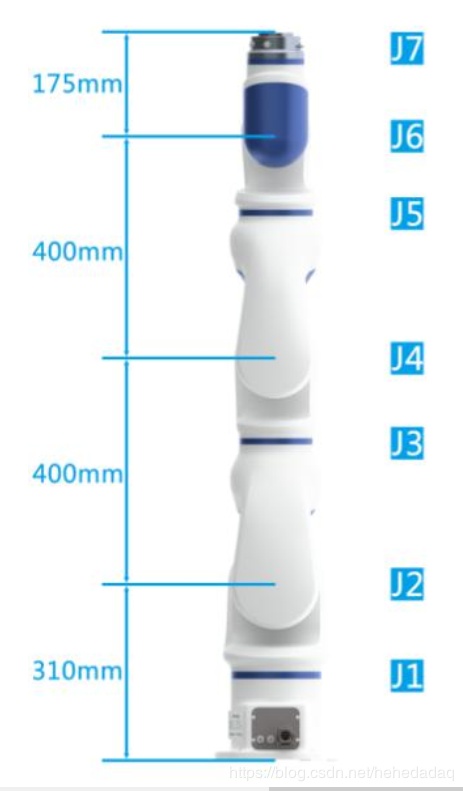
把我这次用的机器人的拿过来,作为例子,有例子,大家理解起来就方便了。

可以看出来一个很有意思的事情, 01关节是放在一起看了,即12坐标系原点重合,这里是将1杆的长度看作0了。下面去计算DH参数的时候也需要注意的。而且我们计算的时候,是无法计算出1轴的坐标。
坐标系和参数对应关系来了,我们就能填好DH表了: 如何填写? 对着坐标轴的图和连杆参数定义,一个一个填。
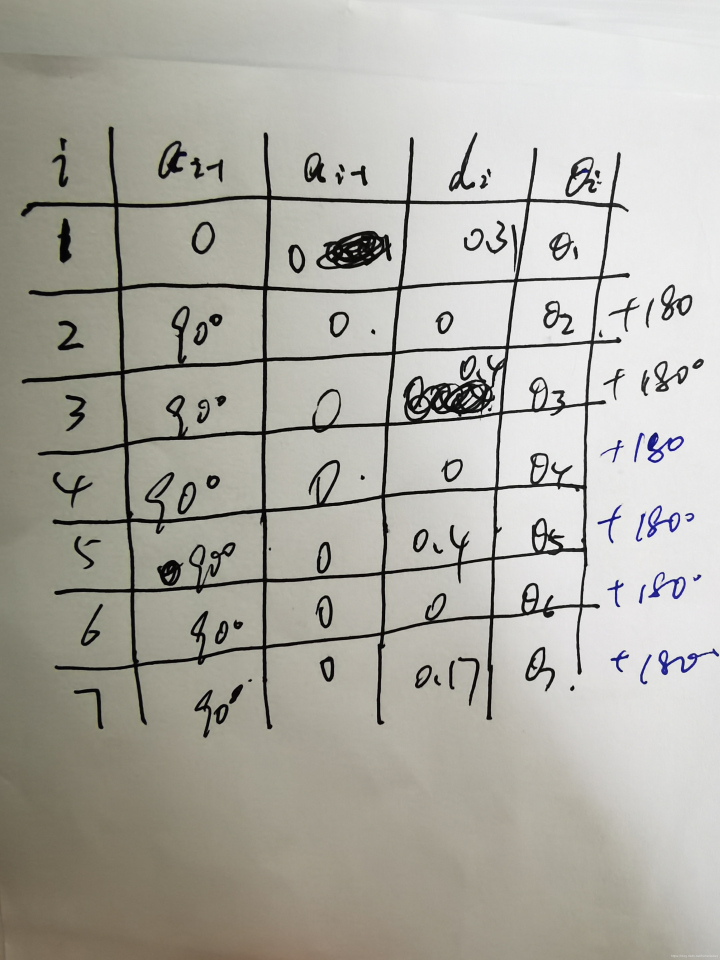
我们以第一个轴为例,第一行有四个值:$alpha$~1-0~ , $a$~1-0~ , $d$~1-0~ $theta$~1-0~ 这里面的$alpha$~1-0~即$alpha$~0~是绕X~0~正方向, 从Z~0~旋转到Z~1~的角度。从图中可以看出来,没旋转,即为0. $a$~0~沿着X~0~,从Z~0~移动到Z~1~的距离,因为两个Z重合,不存在移动距离,即距离为0; d~1~的话,不一样,沿着Z~1~轴,从X~0~移动到X~1~的距离,可以看出来,移动了0.31米,虽然方向不一样,但是确实是得移动这么多,才能重合。 $theta$的话,就是关节转动的角度了,后面几个关节,可能初始角度得加一个180°才行。 这个DH参数值拿到了之后,就得想办法拿到转换矩阵了。 好在《机器人学导论》这本书里直接给了计算公式:
矩阵变换公式:

这玩意儿还得配套几个公式才行。
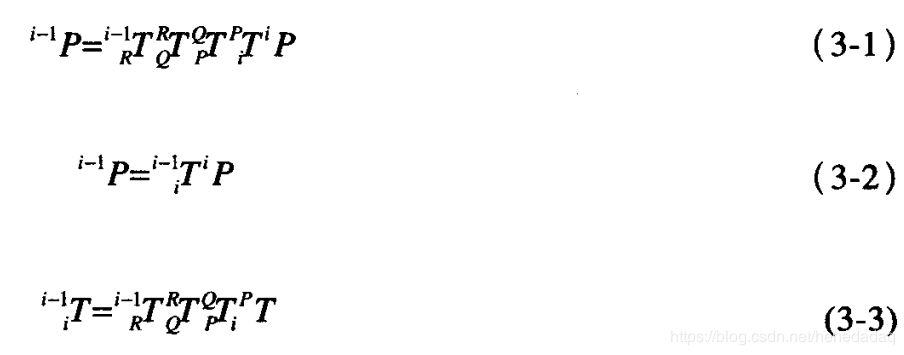

总之拿到了DH参数,就把表里的值代入到T中, 然后连乘,就能计算出末端位姿了。
最后直接上代码吧:
from 














 9289
9289











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









