






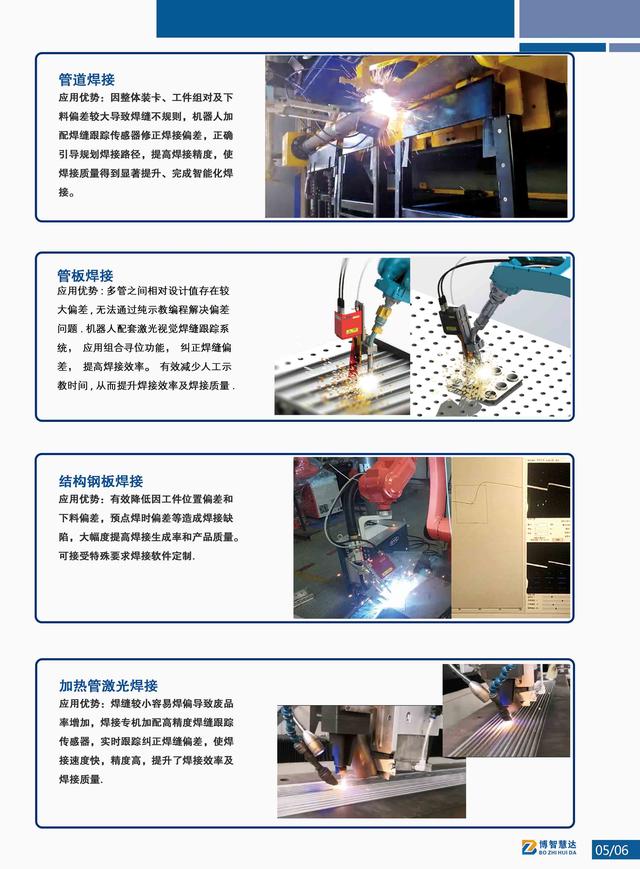
近年来随着现代制造业的蓬勃发展,焊接技术的应用愈发广泛。传统的焊接工作是人工完成的,虽然操作方便,灵活多变,但对经验的依赖非常大,重复精度不高,工作效率也比较低,并且随着用工成本的越来越高,焊接的主流发展已经走向了自动化方向。
在此背景下,多种类型的焊接机器人应运而生,焊接机器人在工作过程中主要采用“示教--再现”的模式,焊接的路径需要提前在机器人中设定,后续机器人按照设定的轨迹进行焊接,重复精度高,焊接效率大大提高。但是,由于工件焊接过程中的热变型以及工装夹具定位偏差等影响,经常会发生实际焊接路径和示教轨迹发生不符的状况,降低了焊接精度以及效率,严重时可能导致焊接失败,工件报废。
为了解决上述的这种问题,目前一般是通过提高工装夹具的精度,增加机器人示教的轨迹数量和频率等方案,成本提升很高,可重复利用性也不高,传统的机器视觉在工业上已经广泛应用,但焊接工业现场恶劣的环境以及电弧的强烈干扰等因素,使得该技术也无法运用。解决该问题是焊接领域的国际性难题。
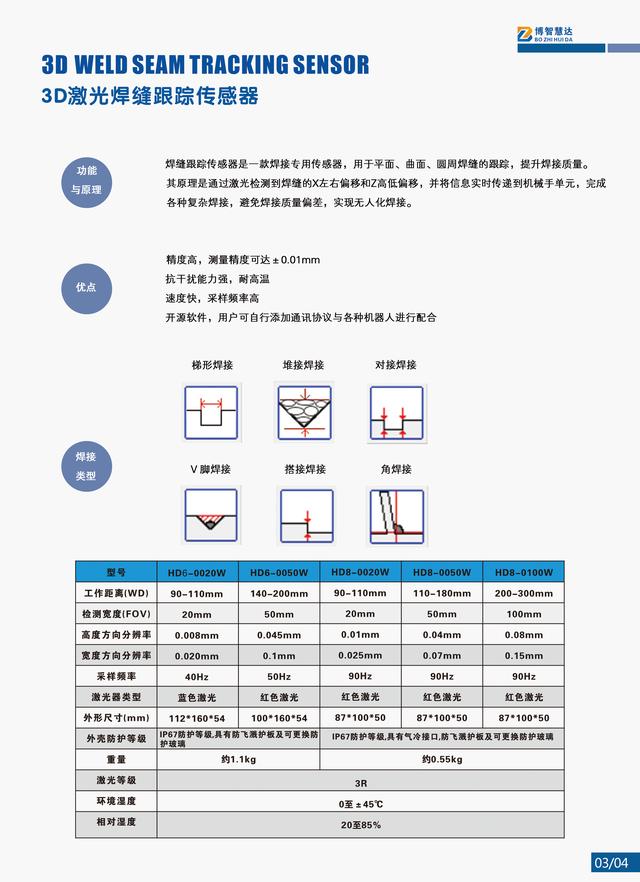
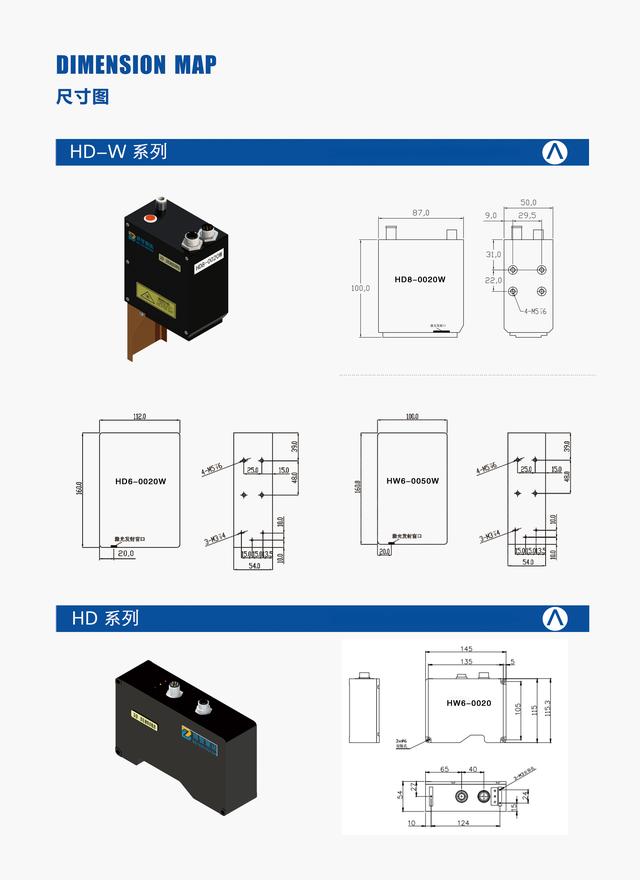
博智慧达自主研发的激光焊缝跟踪传感器通过采集焊缝的形态,再通过软件算法得出焊接目标点的真实位置,将数据实时传送给机器人,引导机器人在真实轨迹上进行焊接,可实时采集高精度的焊缝数据,较大程度上提升焊接精度及工作效率。
博智慧达激光焊缝跟踪系统的优点:
1.整套软件系统采用自主技术,无版权风险
2.焊缝目标识别加入了机器学习算法,提高了识别率和识别精度
3.自主设计的机器人和传感器标定算法,精度较高,标定流程简单易用
4.优化了抗电磁干扰系统,使系统稳定性得到了提升
5.系统整体精度在±0.5mm以内,可提高现有焊接作业场所的焊接器人工作效率50%以上,节省人工30%以上。


















 638
638











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









