





本教程介绍了如何使用ESP32和L298N电机驱动器来控制DC电机的方向和速度。首先,我们将快速了解L298N电机驱动器的工作原理。然后,我们将向您展示一个示例,说明如何使用带有Arduino IDE的ESP32和L298N电机驱动器来控制DC电机的速度和方向。
注意:有很多方法可以控制直流电动机。我们将使用L298N电机驱动器。本教程还与类似的电机驱动器模块兼容。
所需部件
要完成本教程,您需要以下部分:

L298N电机驱动器介绍
有许多方法可以控制直流电动机。我们将在这里使用的方法适用于大多数需要6V或12V操作的业余爱好者电机。
我们将使用L298N电动机驱动器,该驱动器在35V电压下可处理高达3A的电流。此外,它还允许我们同时驱动两个直流电动机,这非常适合构建机器人。
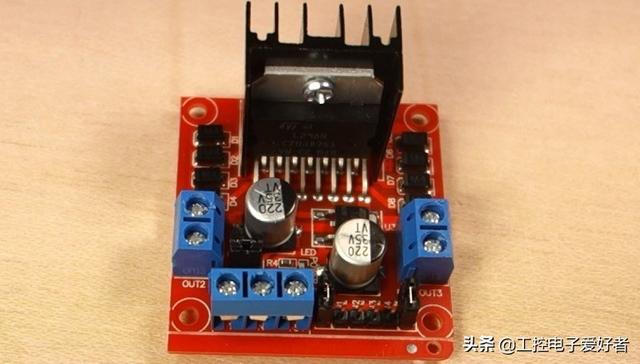
L298N电机驱动器如下图所示:
L298N电机驱动器引脚排列
让我们看一下L298N电机驱动器的引脚排列,看看它是如何工作的。
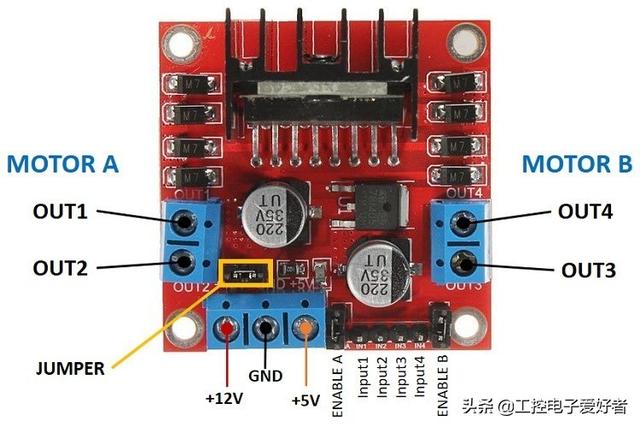
电机驱动器在每个电机的每侧都有两个接线端子。OUT1和OUT2在左侧,OUT3和OUT4在右侧。
OUT1:直流电机A +端子 OUT2:直流电动机A –端子 OUT3:直流电机B +端子 OUT4:直流电动机B –端子在底部,有一个带+ 12V,GND和+ 5V的三个接线端子。+ 12V端子用于马达电源。+ 5V端子用于L298N芯片。但是,如果安装了跳线,则芯片将使用电动机的电源供电,并且您无需通过+ 5V端子提供5V 电压。
注意:如果您提供的电压超过12V,则需要卸下跳线,并向+ 5V端子提供5V的电压。
重要的是要注意,尽管端子名称为+ 12V,但在这里我们将使用设置(在有跳线的情况下)可以提供6V至12V之间的任何电压。在本教程中,将使用4节AA 1.5V电池,这些电池的总输出约为6V,但是您可以使用任何其他合适的电源。例如,您可以使用开关电源来测试本教程。
综上所述:
+ 12V:+ 12V端子是您应该连接电源的地方 GND:电源GND + 5V:如果移除了跳线,则提供5V。如果有跳线,则充当5V输出 跳线:默认的跳线–使用电动机电源为芯片加电。跳线已移除:您需要为+ 5V端子提供5V电压。如果您提供的电压超过12V,则应卸下跳线在右下角,您有四个输入引脚和两个启用端子。输入引脚用于控制直流电动机的方向,而使能引脚用于控制每个电动机的速度。
IN1: 电动机A的输入1 IN2:电动机A的输入2 IN3:电机B的输入1 IN4:电机B的输入2 EN1:电机A的使能引脚 EN2:电机B的使能引脚默认情况下,使能引脚上有跳线帽。您需要卸下那些跳线帽以控制电动机的速度。
使用L298N控制直流电动机
现在您已经熟悉了L298N电动机驱动器,让我们看看如何使用它来控制直流电动机。
使能引脚
使能引脚就像电动机的ON和OFF开关。例如:
如果将 HIGH信号发送到使能1引脚,则电动机A准备好以最大速度进行控制;如果将 低电平信号发送到使能1引脚,则电动机A关闭;否则,电动机A启用。如果发送 PWM信号,则可以控制电动机的速度。电机速度与占空比成正比。但是,请注意,在较小的占空比下,电动机可能不会旋转,并且会发出持续的嗡嗡声。输入脚
输入引脚控制电动机旋转的方向。输入1和输入2控制马达A,输入3和4控制马达B.
如果将LOW应用于输入1,将HIGH应用于输入2,则电动机将正转;如果以相反的方式加电:输入1为高,输入2为低,电动机将向后旋转。可以使用相同的方法来控制电动机B,但是将HIGH或LOW应用于输入3和输入4。控制2台直流电动机–是构建机器人的理想选择
如果要使用2个直流电动机建造机器人汽车,则这些电动机应沿特定方向旋转,以使机器人向左,向右,向前或向后移动。
例如,如果您希望机器人向前移动,则两个电动机都应向前旋转。为了使其向后移动,两者都应向后旋转。
为了使机器人朝一个方向旋转,您需要更快地旋转相反的电机。例如,要使机器人向右转,请在左侧启用电动机,然后在右侧禁用电动机。
使用ESP32控制直流电机–速度和方向
现在,您知道如何使用L298N电动机驱动器控制直流电动机,让我们建立一个简单的示例来控制一个直流电动机的速度和方向。
原理图
我们将控制的电机连接到电机A的输出引脚,因此我们需要将电机驱动器的ENABLEA,INPUT1和INPUT2引脚连接到ESP32。将直流电动机和L298N电动机驱动器连接到ESP32。
DC电动机需要较大的电流跳跃才能启动,因此应使用ESP32的外部电源为电动机供电。例如,我们使用4AA电池,但是您可以使用任何其他合适的电源。在此配置中,您可以使用6V至12V的电源。
电池座和电机驱动器之间的开关是可选的,但切断和接通电源非常方便。这样,您就不需要不断地连接然后断开电线以节省功率。
我们建议将0.1uF陶瓷电容器焊接到直流电动机的正负极,以帮助消除任何电压尖峰。(注意:电动机也可以在没有电容器的情况下工作。)
准备Arduino IDE
Arduino IDE有一个附加组件,可让您使用Arduino IDE及其编程语言对ESP32进行编程。确保已安装ESP32插件后,可以继续本教程。
上传代码
以下代码控制直流电动机的速度和方向。该代码在现实世界中没有用,这只是一个简单的示例,可以更好地了解如何使用ESP32控制DC电动机的速度和方向。
/*********
Rui Santos
Complete project details at https://randomnerdtutorials.com
*********/
// Motor A
int motor1Pin1 = 27;
int motor1Pin2 = 26;
int enable1Pin = 14;
// Setting PWM properties
const int freq = 30000;
const int pwmChannel = 0;
const int resolution = 8;
int dutyCycle = 200;
void setup() {
// sets the pins as outputs:
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(enable1Pin, OUTPUT);
// configure LED PWM functionalitites
ledcSetup(pwmChannel, freq, resolution);
// attach the channel to the GPIO to be controlled
ledcAttachPin(enable1Pin, pwmChannel);
Serial.begin(115200);
// testing
Serial.print("Testing DC Motor...");
}
void loop() {
// Move the DC motor forward at maximum speed
Serial.println("Moving Forward");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
delay(2000);
// Stop the DC motor
Serial.println("Motor stopped");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
delay(1000);
// Move DC motor backwards at maximum speed
Serial.println("Moving Backwards");
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
delay(2000);
// Stop the DC motor
Serial.println("Motor stopped");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
delay(1000);
// Move DC motor forward with increasing speed
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
while (dutyCycle <= 255){
ledcWrite(pwmChannel, dutyCycle);
Serial.print("Forward with duty cycle: ");
Serial.println(dutyCycle);
dutyCycle = dutyCycle + 5;
delay(500);
}
dutyCycle = 200;
}
将代码上传到ESP32。确保选择了正确的板和COM端口。让我们看一下代码是如何工作的。
声明电机引脚
首先,定义电机引脚连接的GPIO。在这种情况下,电机A的输入1连接到GPIO 27,输入2连接到GPIO 26,使能引脚连接到GPIO 14。
int motor1Pin1 = 27;
int motor1Pin2 = 26;
int enable1Pin = 14;
设置PWM属性以控制速度
如前所述,您可以通过向L298N电机驱动器的使能引脚施加PWM信号来控制直流电机的速度。速度将与占空比成正比。要将PWM与ESP32一起使用,您需要首先设置PWM信号属性。
const int freq = 30000;
const int pwmChannel = 0;
const int resolution = 8;
int dutyCycle = 200;
在这种情况下,我们将在通道0上以8位分辨率生成30000 Hz的信号。我们从200的占空比开始(您可以将占空比值设置为0到255)。
对于我们使用的频率,当您应用小于200的占空比时,电机将不会移动,并且会发出奇怪的蜂鸣声。因此,这就是为什么我们一开始将占空比设置为200的原因。
注意:我们在此处定义的PWM属性只是一个示例。电机可以在其他频率下正常工作。
设定()
在setup()中,首先将电动机引脚设置为输出。
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(enable1Pin, OUTPUT);
您需要通过使用ledcSetup()函数来配置具有先前定义的属性的PWM信号,该函数接受pwmChannel,frequency和resolution作为参数,如下所示:
ledcSetup(pwmChannel, freq, resolution);
接下来,您需要选择将从其获取信号的GPIO。为此,请使用 ledcAttachPin()函数,该函数接受要获取信号的GPIO以及生成信号的通道作为参数。在此示例中,我们将在enable1Pin GPIO中获取信号,该GPIO与GPIO 14相对应。生成信号的通道为pwmChannel,与通道0相对应。
ledcAttachPin(enable1Pin, pwmChannel);
向前移动直流电动机
在loop()中是电动机运动的地方。该代码很好地说明了代码各部分的功能。要使电动机向前移动,请将输入1引脚设置为LOW,将输入2引脚设置为HIGH。在此示例中,电动机向前旋转2秒钟(2000毫秒)。
// Move the DC motor forward at maximum speed
Serial.println("Moving Forward");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
delay(2000);
向后移动直流电动机
要向后移动直流电动机,请反方向向电动机输入引脚供电。高输入1,低输入2。
// Move DC motor backwards at maximum speed
Serial.println("Moving Backwards");
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
delay(2000);
停止直流电机
要使直流电动机停止,您可以将使能引脚设置为LOW,或者将输入1和输入2引脚都设置为LOW。在此示例中,我们将两个输入引脚都设置为LOW。
// Stop the DC motor
Serial.println("Motor stopped");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
delay(1000);
控制直流电动机速度
要控制直流电动机的速度,我们需要更改PWM信号占空比。为此,您可以使用ledcWrite()函数,该函数接受生成信号的PWM通道(而不是输出GPIO)和占空比的参数,如下所示。
ledcWrite(pwmChannel, dutyCycle);
在我们的示例中,我们有一个while循环,可以在每个循环中将占空比增加5。
// Move DC motor forward with increasing speed
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
while (dutyCycle <= 255){
ledcWrite(pwmChannel, dutyCycle);
Serial.print("Forward with duty cycle: ");
Serial.println(dutyCycle);
dutyCycle = dutyCycle + 5;
delay(500);
}
当while条件不再成立时,我们将占空比再次设置为200。
dutyCycle = 200;
写在最后
在本教程中,我们向您展示了如何使用ESP32和L298N电机驱动器来控制DC电机的方向和速度。综上所述:
要控制直流电动机旋转的方向,请使用输入1和输入2引脚;将LOW应用于输入1,将HIGH应用于输入2,以使电动机向前旋转。用另一种方法加电以使其向后旋转。要控制直流电动机的速度,请在使能引脚上使用PWM信号。直流电动机的速度与占空比成正比。














 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









