







ALGLIB简介
ALGLIB是一个跨平台数值分析和数据挖掘库,支持多种编程语言(C++,C#,Delphi,VB.NET,Python)和多种操作系统(windows,unix family)。
ALGLIB特性包括:
- 数据分析(分类,回归,统计)
- 优化和非线性求解器
- 插值和线性/非线性最小二乘拟合
- 线性代数(直接算法,EVD/SVD),直接和迭代线性求解器
- 快速傅里叶变换和许多其他算法
选择ALGLIB的理由
- 便携。 几乎任何编译器都可以在几乎任何地方编译它。
- 使用方便。 易于集成,附带大量文档。
- 高效。 内部深度算法和低级优化。
- 受到领先公司的信赖。 从核研究到航空航天。
ALGLIB结构及相关概念
文件结构
这里选择C++版本进行学习选择free C++版本
下载解压可以看到cpp文件夹,该文件包含了该库所有文件。

其cpp文件夹下文件结构如下:
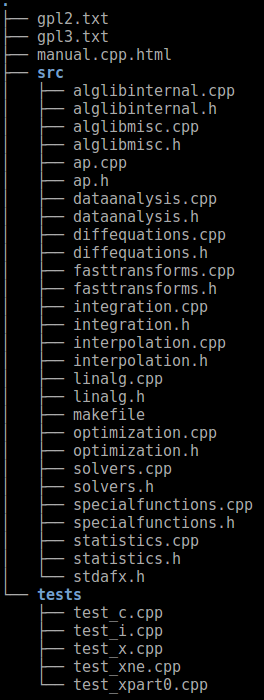
包
ALGLIB其计算核心是由C语言编写,但其提供的是C++接口。C库和C++包装器(wrapper)都是由ALGLIB项目中的代码生成工具自动生成的。在3.0版本之前,包含100多个单元,因此很难处理。自3.0以后所有的单元合并为11个包和2个支持单元:
- alglibmisc.cpp - 很难被分类的算法
- dataanalysis.cpp - 数据挖掘算法
- diffequations.cpp - 微分方程求解器
- fasttransforms.cpp - FFT以及相关算法
- integration.cpp - 包含数值积分算法
- interpolation.cpp - 包含插值算法
- linalg.cpp - 线性代数算法
- optimization.cpp - 优化算法
- solvers.cpp - 线性和非线性求解器
- specialfunctions.cpp - 特殊函数
- statistics.cpp - 统计
- alglibinternal.cpp - 其他包需要但不暴露给外面的内部函数
- ap.cpp - 包含可公开访问的向量/矩阵类,最重要的和通用的函数以及其他“基本”功能
一个包依赖另一个包,但开发者尽量减小依赖数,每个包均依赖于ap.cpp,以及许多包依赖alglibinternal.cpp .
子包
每个包都是由多个源文件构成的,例如(ALGLIB3.0.0)linalg.cpp由14个.cpp文件和14个.c文件合并而来。这个文件提供了不同的功能,为了便于使用和阅读,相关的文件并未随着代码的合并而合并。
每个包包含了不同的子包,例如linalg.cpp包含trfac,svd,evd和其他子包。这些子包不存在独立的文件,命名空间或者其他的实体,它们只是一个大单元的子集,提供了截然不同的功能。 它们有单独的文档部分,但是如果要使用svd子包,则必须包含linalg.h,而不是svd.h。也就是说,其子包只是为了阅读方便。
编译和引用ALGLIB
在一个项目中,使用ALGLIB库非常的简单明了,只需要将其中涉及到的文件加入到你自己的源文件中就可以,其编译器如果为GCC或者MSVC时,则不需要任何额外的设置。这里我们采用GCC,因此无需多余的设置。
简单的一个求极值例子
ALGLIB这里给出利用ALGLIB求解QP问题的例子,以简要了解其工作原理和流程:
该例子最小化函数
F
(
x
0
,
x
1
)
=
x
0
2
+
x
1
2
−
6
x
0
−
4
x
1
F(x_0,x_1) = x_0^2 + x_1^2 -6x_0 - 4x_1
F(x0,x1)=x02+x12−6x0−4x1
其中:
0.0
<
=
x
0
,
x
1
<
=
2.5
0.0 <= x_0,x_1 <= 2.5
0.0<=x0,x1<=2.5
其正确解为:
x
0
=
2.5
,
x
1
=
2.0
x_0=2.5,x_1=2.0
x0=2.5,x1=2.0
- 建立demo1文件夹,并在里面创建main.cpp文件,其文件内容如下:
#include "stdafx.h"
#include <stdlib.h>
#include <stdio.h>
#include <math.h>
#include "optimization.h"
using namespace alglib;
int main(int argc, char **argv)
{
//
// This example demonstrates minimization of F(x0,x1) = x0^2 + x1^2 -6*x0 - 4*x1
// subject to bound constraints 0<=x0<=2.5, 0<=x1<=2.5
//
// Exact solution is [x0,x1] = [2.5,2]
//
// We provide algorithm with starting point. With such small problem good starting
// point is not really necessary, but with high-dimensional problem it can save us
// a lot of time.
//
// Several QP solvers are tried: QuickQP, BLEIC, DENSE-AUL.
//
// IMPORTANT: this solver minimizes following function:
// f(x) = 0.5*x'*A*x + b'*x.
// Note that quadratic term has 0.5 before it. So if you want to minimize
// quadratic function, you should rewrite it in such way that quadratic term
// is multiplied by 0.5 too.
// For example, our function is f(x)=x0^2+x1^2+..., but we rewrite it as
// f(x) = 0.5*(2*x0^2+2*x1^2) + ....
// and pass diag(2,2) as quadratic term - NOT diag(1,1)!
//
real_2d_array a = "[[2,0],[0,2]]";
real_1d_array b = "[-6,-4]";
real_1d_array x0 = "[0,1]";
real_1d_array s = "[1,1]";
real_1d_array bndl = "[0.0,0.0]";
real_1d_array bndu = "[2.5,2.5]";
real_1d_array x;
minqpstate state;
minqpreport rep;
// create solver, set quadratic/linear terms
minqpcreate(2, state);
minqpsetquadraticterm(state, a);
minqpsetlinearterm(state, b);
minqpsetstartingpoint(state, x0);
minqpsetbc(state, bndl, bndu);
// Set scale of the parameters.
// It is strongly recommended that you set scale of your variables.
// Knowing their scales is essential for evaluation of stopping criteria
// and for preconditioning of the algorithm steps.
// You can find more information on scaling at http://www.alglib.net/optimization/scaling.php
//
// NOTE: for convex problems you may try using minqpsetscaleautodiag()
// which automatically determines variable scales.
minqpsetscale(state, s);
//
// Solve problem with QuickQP solver.
//
// This solver is intended for medium and large-scale problems with box
// constraints (general linear constraints are not supported).
//
// Default stopping criteria are used, Newton phase is active.
//
minqpsetalgoquickqp(state, 0.0, 0.0, 0.0, 0, true);
minqpoptimize(state);
minqpresults(state, x, rep);
printf("%d\n", int(rep.terminationtype)); // EXPECTED: 4
printf("%s\n", x.tostring(2).c_str()); // EXPECTED: [2.5,2]
//
// Solve problem with BLEIC-based QP solver.
//
// This solver is intended for problems with moderate (up to 50) number
// of general linear constraints and unlimited number of box constraints.
//
// Default stopping criteria are used.
//
minqpsetalgobleic(state, 0.0, 0.0, 0.0, 0);
minqpoptimize(state);
minqpresults(state, x, rep);
printf("%s\n", x.tostring(2).c_str()); // EXPECTED: [2.5,2]
//
// Solve problem with DENSE-AUL solver.
//
// This solver is optimized for problems with up to several thousands of
// variables and large amount of general linear constraints. Problems with
// less than 50 general linear constraints can be efficiently solved with
// BLEIC, problems with box-only constraints can be solved with QuickQP.
// However, DENSE-AUL will work in any (including unconstrained) case.
//
// Default stopping criteria are used.
//
minqpsetalgodenseaul(state, 1.0e-9, 1.0e+4, 5);
minqpoptimize(state);
minqpresults(state, x, rep);
printf("%s\n", x.tostring(2).c_str()); // EXPECTED: [2.5,2]
return 0;
}
- 将cpp文件夹下src的所有文件拷贝到demo1文件夹中(这里后续优化)。
- 在demo1目录下进行编译:g++ *.cpp -o test
- 运行。在demo1目录下输入:./test运行。结果如下:
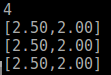
该例子用了三种方法求解一个简单的QP问题,在后面的学习中一一介绍。

















 1018
1018

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









