







前言:
本文是根据哔哩哔哩网站上“正点原子[第二期]Linux之ARM(MX6U)裸机篇”视频的学习笔记,在这里会记录下正点原子 I.MX6ULL 开发板的配套视频教程所作的实验和学习笔记内容。本文大量引用了正点原子教学视频和链接中的内容。
引用:
正点原子IMX6U仓库 (GuangzhouXingyi) - Gitee.com
《【正点原子】I.MX6U嵌入式Linux驱动开发指南V1.5.2.pdf》
正点原子资料下载中心 — 正点原子资料下载中心 1.0.0 文档
SPI学习参考资料:
简述SPI通信协议-01_cpha选择为第一个边沿-CSDN博客
摩托罗拉 《SPI Block Guide V03.06》 手册
链接:https://pan.baidu.com/s/1_mvR5AD0-OBI2bYyx2i4Sw?pwd=f4bo
提取码:f4bo
正文:
本文是 “正点原子[第二期]Linux之ARM(MX6U)裸机篇--第24讲 SPI驱动。本节将参考正点原子的视频教程第24讲和配套的正点原子开发指南文档进行学习。
0. 概述
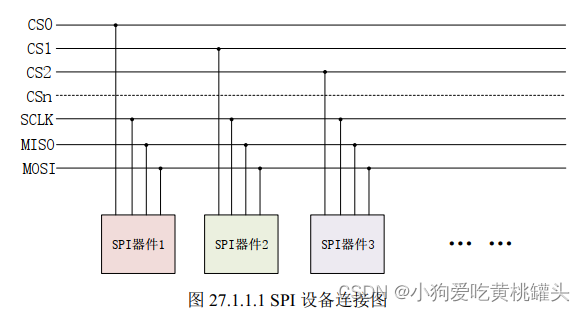
通I2C一样,SPI是很常用的通信接口,也可以通过SPI来连接众多的传感器。相比I2C接口,SPI接口的通信速度很快,I2C最多400KHz,但是SPI可以到达即使MHz。I.MX6U 也有4个SPI接口,可以通过这4个SPI接口来连接一些SPI外设。I.MX6U-ALHPA使用SPI3接口连接了一个6周传感器 ICM-20608,本章我们就来学习如何使用I.MX6U的SPI接口来驱动ICM-20608,读取ICM-20608的六轴数据。
1. I.MX6U 的SPI接口
I.MX6U 处理器的SPI接口在《I.MX6ULL参考手册》的第20章 "Chapter 20Enhanced Configurable SPI (ECSPI)"章节,
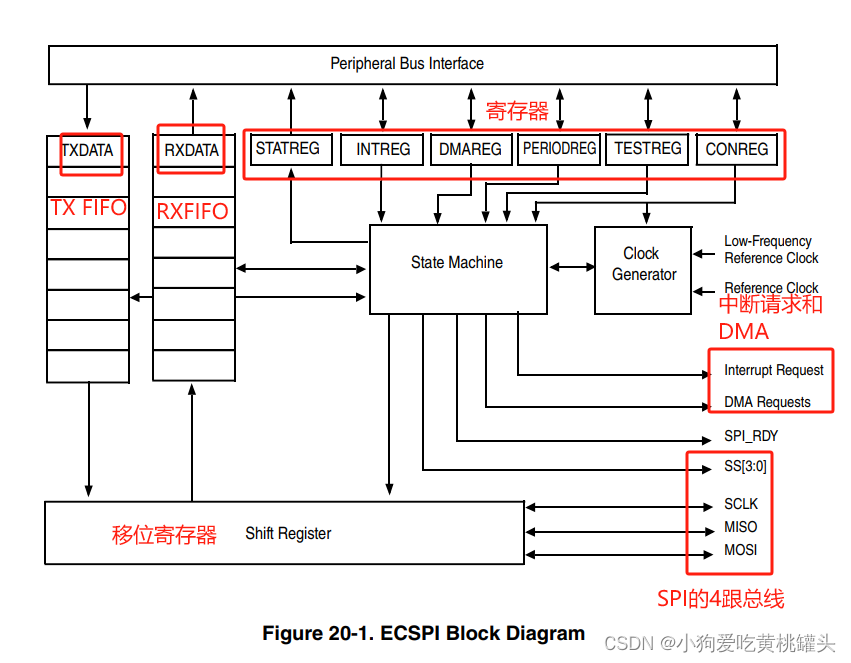
I.MX6U ECSPI 接口的硬件框图如下:
- ECSPI有64个32位的TXFIFO 缓冲区
- ECSPI有64个32位的RXFIFO 缓冲区
- 通过ECSPI 硬件接口的 FIFOx 缓冲区可以减少数据传输时的中断数量从而提高传输速率
I.MX6U ECSPI 硬件接口的特向如下:
- 全双工,同步,串行接口
- 主机/从机模式
- 4个CS(Chip Seclect)片选信号线来支持多个外部设备
- 持续传输模式允许任意长度的数据传输
- Tx和Rx方向分别有32位的 64 条目的FOFO缓冲器
- 时钟极性(Polarity),时钟相位(Phase)和时钟频率可以配置
- DMA支持
- 最大运行频率可以达到参考时钟频率
2. I.MX6U ECSPI 时钟
从I.MX6U的时钟树(Clock Tree)可以找到 ECSPI 接口的时钟来源于 PLL3_480MHz,并且经过一个固定值为8的分频,所以从时钟树CCM进入到到 ESPAI 接口的时钟频率为
ESAPI = PLL3_480Mhz/8 = 60MHz
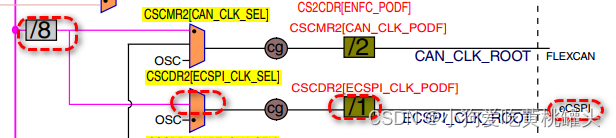
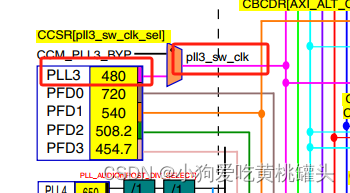
在ECSAPI时钟树可以看到,ECSAPI的时钟源选择还需要配置一个多路选择器 CCM_CSCDR2 [ECSPI_CLK_SEL] 和一个分频器 CCM_CSCDR2[ECSPI_CLK_PODF] 。
这个CCM_CSCDR2 寄存器的结构如下图所示:
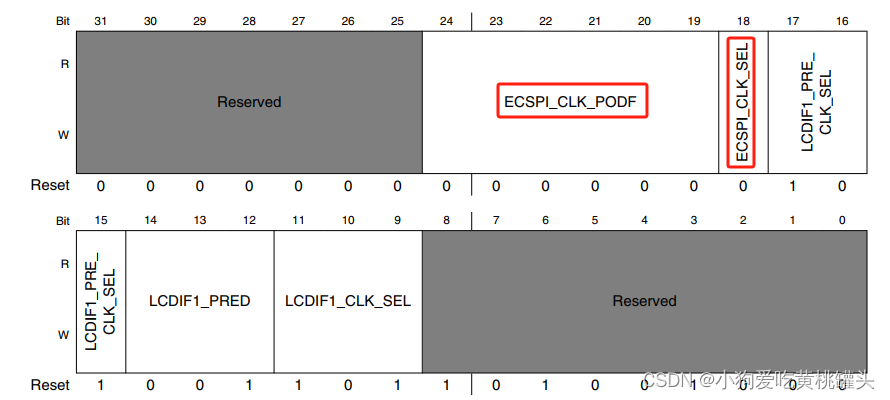


这里配置为1分频,时钟源选择为PLL3_60M
CCM_CSCDR2寄存器的 bit[24:19] 设置为0表示1分频,bit[18]=0 表示时钟源选择 PLL3_60M
3. I.MX6U ECSPI 寄存器
I.MX6U ECSPI 寄存器主要有如下这些寄存器。
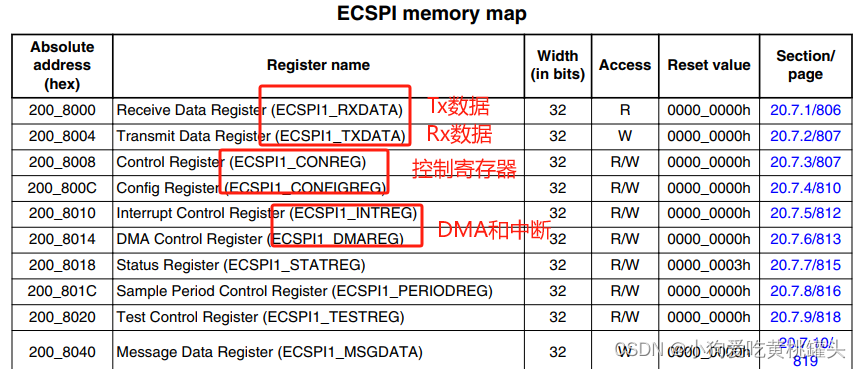
本节实验中正点原子的示例教程里不使用SPI的DMA和中断,所以我们需要的寄存器有:
- ECSPIx_RXDATA:Tx要发送数据
- ECSPIx_TXDATA:Rx接收到的数据
- ECSPIx_CONREG:控制寄存器
- ECSPIx_CONFIGREG:控制寄存器
- ECSSPIx_STATREG:状态寄存器
3.1 ECSPIx_RXDATA寄存器
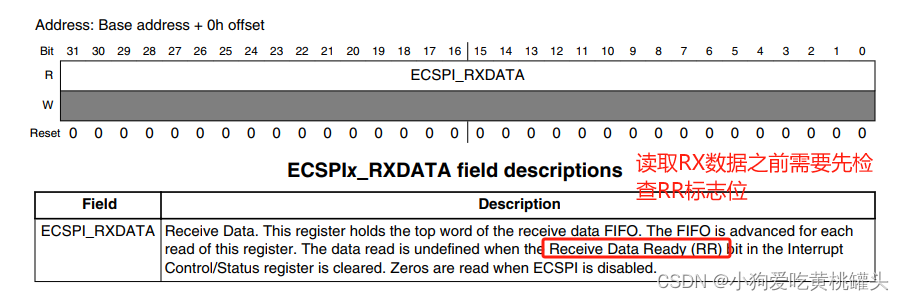
ECSPIx_RXDATA 是32位的 Rx 接收数据寄存器,在读取Rx数据之前需要先检查 RR (Read Ready)标志位是否为1.
3.2 ECSPIx_TXDATA寄存器
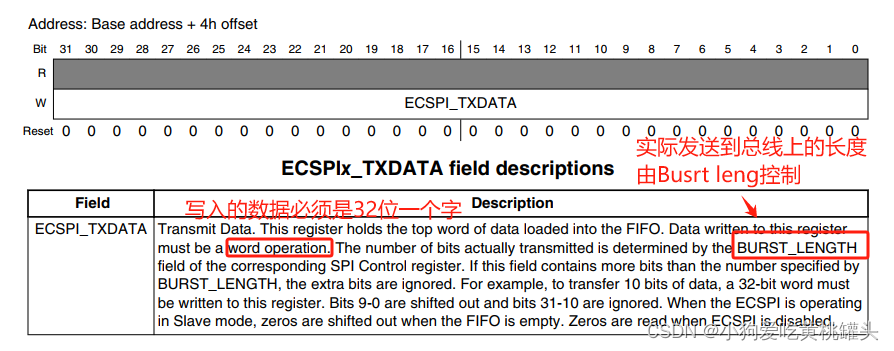
ECSPIx_TXDATA 是32位的 Tx 发送数据寄存器,写到TxDATA寄存器的数据被存放到ECSPI的TX FIFO中,如果TXFIFO不满软件就可以向这个寄存器写值。
3.3 ECSPIx_CONREG 寄存器
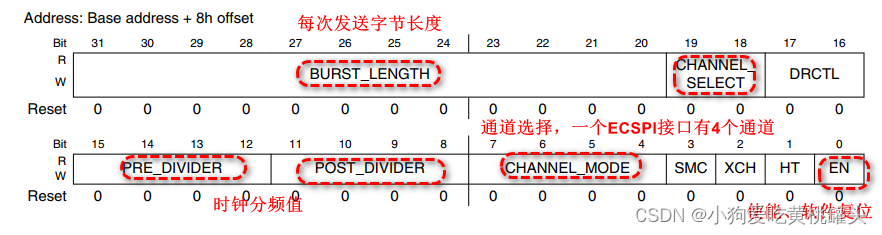
ECSPI_CONREG 寄存器允许软件来使能/复位 ECSPI接口,设置时钟分频值,设置传输长度(Bust-Length)。我们需要使用的位如下:
- EN bit[0]:为1使能ECSPI接口,为0去使能接口并对ECSPI进行复位。
- HT bit[1]: 硬件翻转,手册说I.MX6ULL不支持该功能
- XCH bit[2]:指示空闲或者Busy,本实验设置该位值为0。
- SMC bit[3]:传输开始模式,值为1的时候需要SPI_RDY信号来控制传输开始,值为0时TXFIFO中写数据立即传输开始,本实验设置该位为0。
- CHANNEL_MODE bit[7:4]:一个ECSPI接口支持4个通道(Channel),这里是选择4个通道的工作模式为主机模式(Master)还是从机模式(Slave),本实验使用 Channel 0,所以该位设置为0x1.
- POST_DIVDER bit[11:8]:后级分频,值范围为0~15对应2的(0~15)次方分频。
- PRE_DIVIDER bit[15:12]:前级分频,值范围为0~15对应1~16分频。
- DRCTL bit[17:16]:本实验不使用
- BUSRT_LENGTH bit[31:20]:每次突发传输长度,值范围为0~0XFFF,对应1到0x1000 bit 位,本实验设置每次突发传输长度为8位,所以设置值为7。
3.4 ECSPI_CONFIGREG寄存器

ECSPIx_CONFIGREG 寄存器允许软件来配置SPI通道的运行模式,串行时钟的极性(CPOL: Clock Polarity),串行时钟的相位(Clock Phase),数据发送波形模式(SPI Wave From)。本实验中用到的寄存器如下:
- SCLK_PHA bit[3:0]:ECSPI接口支持4个通道(channel) ,通道0~3,配置通道0~3的 CPHA 时钟相位。
- SCLK_POL bit[3:0]:ECSPI接口支持4个通道(channel) ,通道0~3,配置通道0~3的 CPOL时钟极性。
- SS_CTL bit[11:8]:SPI Wave From 波形模式,配置SPI发送数据时 single bust 单突发模式,还是Multi bust 多突发模式,单突发模式每次发送数据之后等待用户再次写入数据,多突发模式会发送一个burst之后自动拉高拉低SS线并再次发送TXFIFO中的下一个数据知道TXFIFO为空。本实验选择多突发模式。
- DATA_CTL(bit19:16):设置 DATA 信号线空闲状态电平, DATA_CTL[3:0]分别对应通道3~0,为 0 的话 DATA 空闲状态为高电平,为 1 的话 DATA 空闲状态为低电平。
- SCLK_CTL bit[23:20]:设置 SCLK 信号线空闲状态电平, SCLK_CTL[3:0]分别对应通道3~0,为 0 的话 SCLK 空闲状态为低电平,为 1 的话 SCLK 空闲状态为高电平
3.5 ECSPIx_STATREG
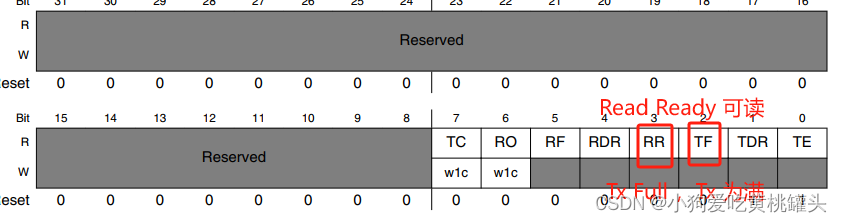
ECSPIx_STATREG 状态寄存器指示ECSPI接口的 TxFIFO和 RXFIFO的状态,本实验我们需要使用的是:
- TC(bit7):传输完成标志位,为 0 表示正在传输,为 1 表示传输完成。
- RO(bit6): RXFIFO 溢出标志位,为 0 表示 RXFIFO 无溢出,为 1 表示 RXFIFO 溢出。
- RF(bit5): RXFIFO 空标志位,为 0 表示 RXFIFO 不为空,为 1 表示 RXFIFO 为空。
- RDR(bit4): RXFIFO 数据请求标志位,此位为 0 表示 RXFIFO 里面的数据不大于
- RX_THRESHOLD,此位为 1 的话表示 RXFIFO 里面的数据大于 RX_THRESHOLD。
- RR(bit3): RXFIFO 就绪标志位,为 0 的话 RXFIFO 没有数据,为 1 的话表示 RXFIFO 中至少有一个字的数据。
- TF(bit2): TXFIFO 满标志位,为 0 的话表示 TXFIFO 不为满,为 1 的话表示 TXFIFO 为满。
- TDR(bit1): TXFIFO 数据请求标志位,为 0 表示 TXFIFO 中的数据大于 TX_THRESHOLD,为 1 表示 TXFIFO 中的数据不大于 TX_THRESHOLD
- TE(bit0): TXFIFO 空标志位,为 0 表示 TXFIFO 中至少有一个字的数据,为 1 表示 TXFIFO为空。
3.6 ECSPI_PERIODREG
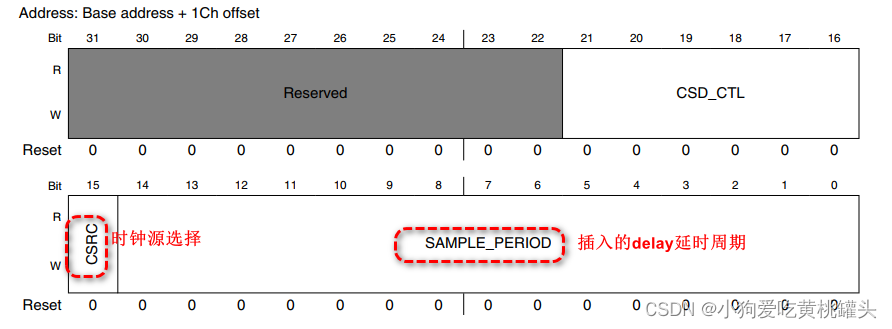
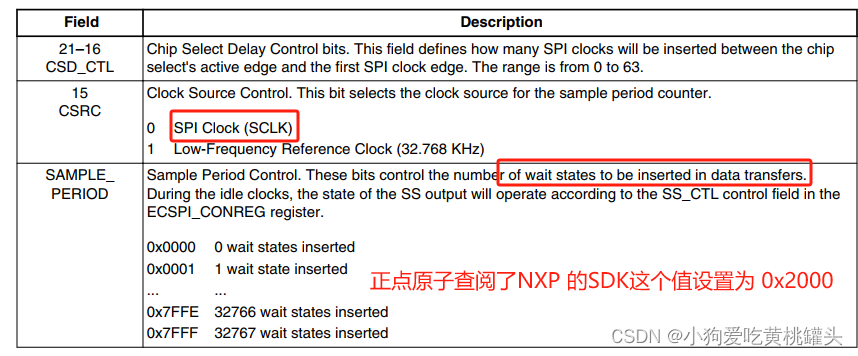
寄存器 ECSPIx_PERIODREG,这个是 ECSPI 的采样周期寄存器。寄存器 ECSPIx_PERIODREG 用到的重要位如下:
- CSD_CTL(bit21:16): 片选信号延时控制位,用于设置片选信号和第一个 SPI 时钟信号之间的时间间隔,范围为 0~63。
- CSRC(bit15): SPI 时钟源选择,为 0 的话选择 SPI CLK 为 SPI 的时钟源,为 1 的话选择32.768KHz 的晶振为 SPI 时钟源
关于 ECSPI 的寄存器就介绍到这里,关于这些寄存器详细的描述,请参考《I.MX6ULL 参
考手册》第 805 页的 20.7 小节。
4. ICM-20608 6轴传感器
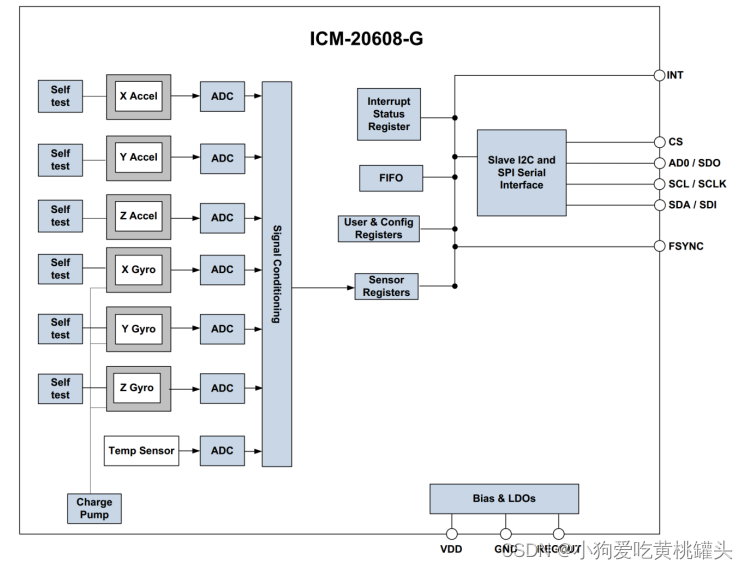
ICM-20608 是 InnvenSence 出品的一款6轴 MEMS传感器,包括3轴加速度和3周陀螺仪。ICM20608 的尺寸非常小,只有3X3X0.57ms,采用16P的LGA封装。ICM-20608内部有一个512字节的FIFO 。陀螺仪的量程范围可以编程设置,可以选择±250,±500,±1000和±2000 °/s,加速度计的量程范围也可以编程设置,可选择±2g,±4g,±8g和±16g。陀螺仪和加速度计都是16位的ADC,并且支持I2C和SPI两种协议,使用I2C接口的话通信速率可以达到400KHz,使用SPI接口的话通信速度可以高达8MHz。I.MX6U-ALPHA开发板上的ICM-20608通过SPI接口和I.MX6U连接在一起。ICM-20608特性如下:
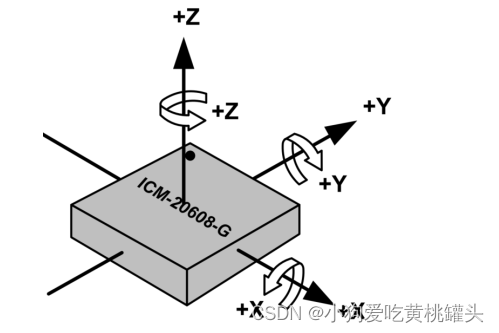
- 陀螺仪支持X,Y 和 Z 三轴输出,内部集成16位ADC,测量范围可设置,±250,±500,±1000和±2000 °/s。
- 加速度计支持X,Y 和 Z 轴输出,内部集成16为ADC,测量范围可设置,±2g,±4g,±8g和±16g。
- 用户可编程中断
- 内部包含了512字节的FIFO
- 内部包含一个数字温度传感器
- 难受1000g的冲击
- 支持快速I2C,速度可以达到400KHz。
- 支持SPI,速度可以到达 8MHz。
ICM-20608的3轴方向如下图所示:
ICM-20608的结构框图如下图所示:
术语表
| 英文单词 | 中文解释 | 英文词源(词根) |
| gyroscope | 陀螺仪;[航] 回转仪 | gyroscope:陀螺仪 gyro-, 旋转。-scope, 看,见telescope. 后用做科技名词。 |
| accelerometer | 加速度计;(飞机、火箭的)加速器 | accelerate + -meter FR |
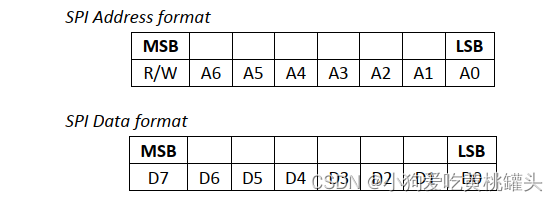
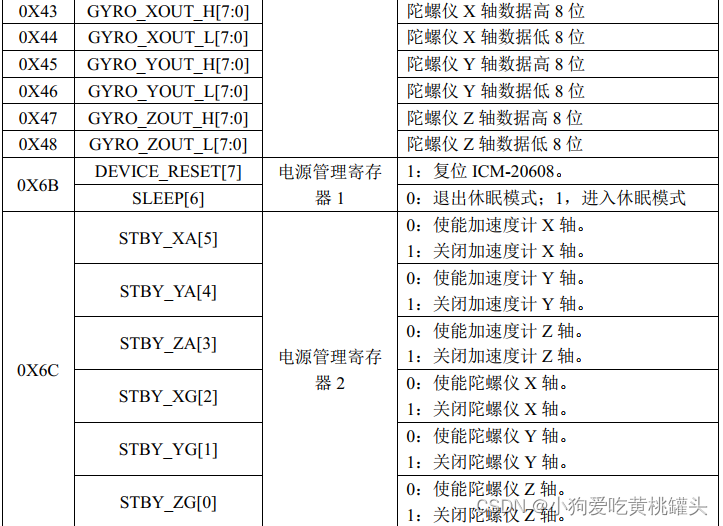
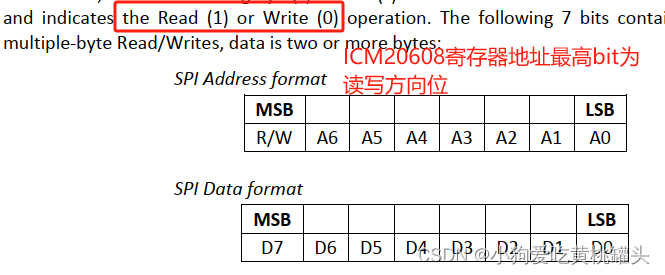
如果使用I2C接口的话 IMC-20608 的 AD0 引脚决定I2C设备从地址的最后一位,如果AD0为0的话ICM-20608从设备的地址是0x68,如果AD0为1的话ICM-20608从设备的地址为0x69。本章我们使用SPI接口,根上一章使用AP3216C一样,ICM-20608也是通过读写寄存器来配置和读取传感器数据,使用SPI接口读写寄存器需要16个时钟周期获证更多(如果写操作包括多个字节的话),第一个字节包含要读写的寄存器地址,寄存器地址最高位是读写标志位,如果是读的话寄存器地址最高位要为1,如果是写的话寄存器地址最高位要为0,剩下的7位才是实际的寄存器地址,寄存器地址后面跟着的就是读写的数据。下表列出了本实验用到的一些寄存器和位,关于ICM-20608的详细寄存器和位的介绍请参考ICM-20608寄存器手册。
ICM-20608 6轴传感器的Datasheet数据手册,介绍其SPI通信读写寄存器数据的命令序列如下:
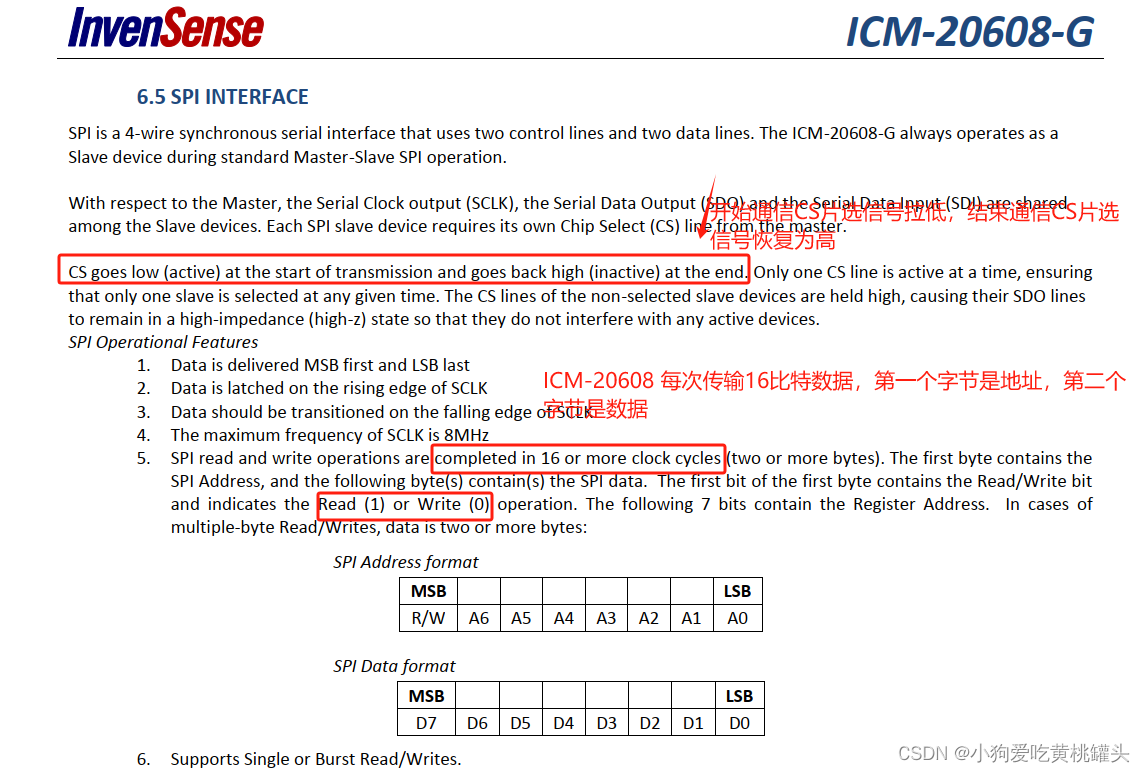
- ICM-20608也是通过读写寄存器来配置和读取传感器数据,使用SPI接口读写寄存器需要16个时钟周期获证更多(如果写操作包括多个字节的话)
- 第一个字节包含要读写的寄存器地址,寄存器地址最高位是读写标志位,如果是读的话寄存器地址最高位要为1,如果是写的话寄存器地址最高位要为0,剩下的7位才是实际的寄存器地址
- 寄存器地址后面跟着的就是读写的数据
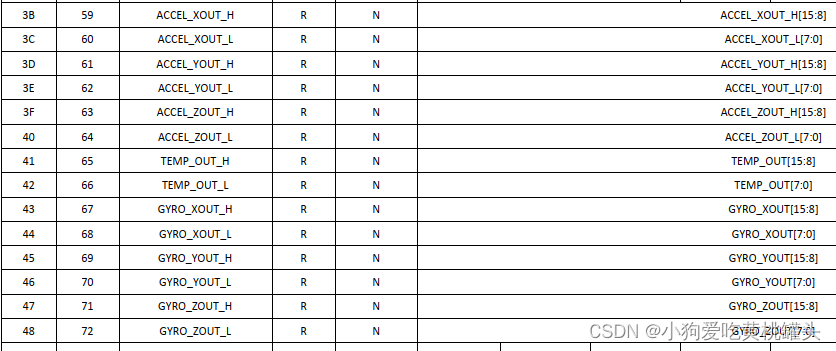
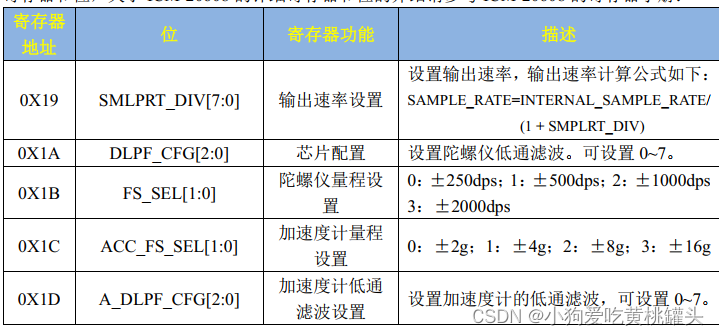
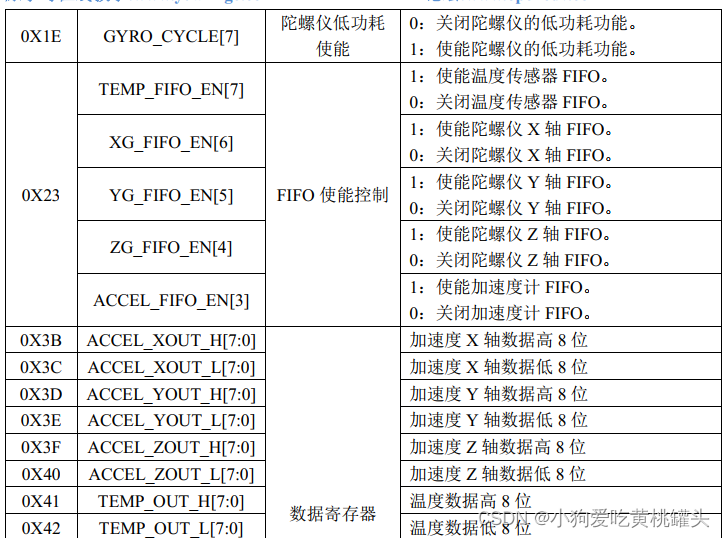
本实验用到的一些ICM-20608寄存器和位:

ICM-20608 的介绍就到这里,关于 ICM-20608 的详细介绍请参考 ICM-20608 的数据手册和
寄存器手册。
英文术语:
| 英文 | 中文解释 | 术语结束 |
| DLPF filter block | DLPF是数字低通滤波器(Digital Low-Pass Filter)的缩写。 | DLPF是数字信号处理技术的一种,主要用于降低采集信号中的噪音。在工程和科研领域,它被用来提取原始信号中的有效部分,并消除高频和噪音成分,以保证信号的可靠性和准确性。具体来说,DLPF能够滤除信号的高频成分,保留低频部分,从而达到降噪和滤波效果。这种技术在多个领域都有应用,例如半导体芯片、通信和医学电子。在医学影像系统中,DLPF能提升图像的清晰度和信噪比,方便医生和病人的诊断。在通信领域,DLPF也有助于提升通话质量 |
| SMPLRT_DIV | Sample Rate Divider | SMPL 是Sample的缩写,采样 RT 是Rate的缩写 SMPLRT合起来是SampleRate 采样率的缩写 DIV,是Divider 的缩写 |
| latch | 弹簧锁, 碰锁, 门闩 锁存器, | 作为名词时,Latch通常指的是“门闩”、“碰锁”或“弹簧锁”,这是一种用于固定门或窗的装置 作为动词时,Latch的意思是“用闩把...闩上”或“用碰锁把...锁上”,即使用门闩或碰锁将门、窗等固定或锁住
|
| Transitioned | “Transitioned”是英文单词“transition”的过去式和过去分词形式,主要有以下几层含义 | 转变、变迁:它通常用来描述某种状态、形式或位置的改变或过渡。例如,一个人从一种职业过渡到另一种职业,或者一个社会从一个阶段转变到另一个阶段,都可以使用“transitioned”来描述这种变化 |
| FS_SEL | Full Scale Select | ICM-20608 X/Y/Z 轴加速度计的量程范围选择,可选择±2g,±4g,±8g和±16g |
5. 硬件原理
正点原子I.MX6U ALPHA 开发板上使用的ICM-20608 6轴MEMS 陀螺仪角速度和加速度传感器的SPI接口进行通信,在I.MX6U-ALPHA 开发板底板的电路原理图中使用如下引脚:
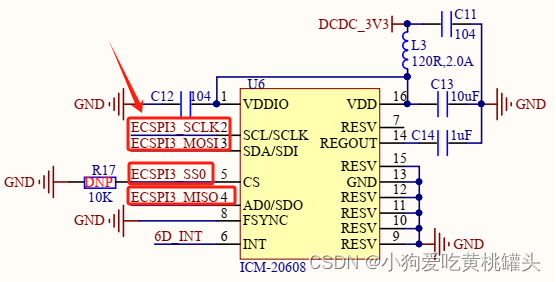
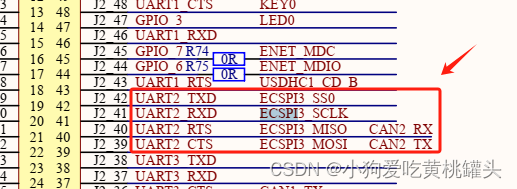
从电路原理图得到ICM-20608 MEMS传感器使用的SPI引脚对应的I.MX6U IOMUX 接口复用如下:
| SPI信号线 | SPI信号线功能 | IO引脚 | IOMUX复用 |
| ECSPI3_SS0 | 片选 | UART2_TXD | ALT8 |
| ECSPI3_SCLK | 时钟 | UART2_RXD | ALT8 |
| ECSPI3_MISO | 主设备输入 | UART2_RTS | ALT8 |
| ECSPI3_MOSI | 主设备输出 | UART2_CTS | ALT8 |
6. SPI驱动程序源码编写
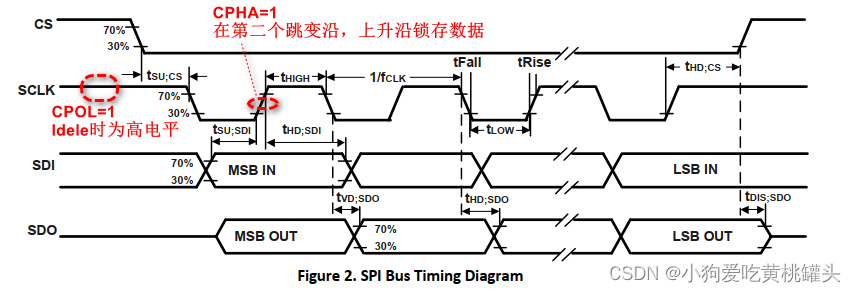
6.1 ICM20608 SPI 接口特性
ICM20608 SPI 接口的CPOL(Clock Polarity时钟极性)和CPHA(Clock Phase时钟相位)从数据手册中可以找到,如下图,ICM20608 SPI 接口的 CPOL=1, CPHA=1 。
6.2 通过SPI读取 ICM20608 的 chipId
可以先通过通过SPI读取 ICM20608 的 chipId 来测试下和spi接口通信和寄存器读取是否正常。
bsp_spi.c 文件
#include "bsp_spi.h"
#include "bsp_delay.h"
/*
* @description : SPI初始化。
* @param : 无
* @return : 无
*/
void spi_init(ECSPI_Type *base)
{
base->CONREG = 0; /* 清零 */
delay_ms(10); /* 复位之后延时10ms */
base->CONREG |= (1 << 0) | (1 << 3) | (1 << 4) | (0 << 18) | (7 << 20);
/* SPI时钟前级分频 15, 后级分频4,SPI时钟频率为60MHz/15/4=1MHz */
base->CONREG &= ~((0xF << 8) | (0xF << 12)); /* 清零以前配置 */
base->CONREG |= (2 << 8) | (0xE << 12);
/*
* bit[20] SPI通道0的时钟CPOL=1,时钟空闲时为高电平
* bit[16] SPI通道0的数据空闲时为高电平 0
* bit[12] SPI通道0的SS片选信号有效为低电平 0
* bit[8] SPI通道0的 Wave From 波形选择时single burst还是multibust,
* bit[4] SPI通道0的时钟极性,1 时钟空闲时为高电平
* bit[0] SPI通道0的时钟相位,1 在第二个时钟源锁存数据(上升沿)
*/
base->CONFIGREG = 0;
/* ICM20608 SPI 数据手册指明其CPOL=1, CPHA=1 */
//base->CONFIGREG |= (1 << 0) | (1 << 4);
// | (1 << 8)
// | (0 << 12)
// | (0 << 16) | (1 << 20);
base->PERIODREG = 0;
/* 正点原子查了NXP SDK 中是这个值 */
base->PERIODREG |= 0x2000;
}
unsigned char spi_readwrite_onebyte(ECSPI_Type *base, unsigned char value)
{
uint32_t txdata = value;
uint32_t rxdata;
while(!(base->STATREG & (1 << 0))); /* wait for TXFIFO empty */
base->TXDATA = txdata; /* write txdata */
while(!(base->STATREG & (1 << 3))); /* wait for RXFIFO read ready */
rxdata = base->RXDATA; /* read rxdata */
return rxdata;
}
bsp_icm20608.c 文件
#include "bsp_icm20608.h"
#include "bsp_gpio.h"
#include "bsp_spi.h"
#include "stdio.h"
/* 初始化ICM20608 */
void icm20608_init(void)
{
gpio_pin_config_t config;
/* 1.SPI 引脚的初始化 */
IOMUXC_SetPinMux(IOMUXC_UART2_RX_DATA_ECSPI3_SCLK, 0); /* 复用为ECSPI3_SCLK */
IOMUXC_SetPinMux(IOMUXC_UART2_CTS_B_ECSPI3_MOSI, 0); /* 复用为ECSPI3_MOSI */
IOMUXC_SetPinMux(IOMUXC_UART2_RTS_B_ECSPI3_MISO, 0); /* 复用为ECSPI3_MISO */
IOMUXC_SetPinConfig(IOMUXC_UART2_RX_DATA_ECSPI3_SCLK, 0x10B0); /* IO特性 */
IOMUXC_SetPinConfig(IOMUXC_UART2_CTS_B_ECSPI3_MOSI, 0x10B0); /* IO特性 */
IOMUXC_SetPinConfig(IOMUXC_UART2_RTS_B_ECSPI3_MISO, 0x10B0); /* IO特性 */
IOMUXC_SetPinMux(IOMUXC_UART2_TX_DATA_GPIO1_IO20, 0); /* 复用为GPIO1_20 */
IOMUXC_SetPinConfig(IOMUXC_UART2_TX_DATA_GPIO1_IO20, 0x10B0); /* IO特性 */
config.direction = kGPIO_DigitalOutput;
config.outputLogic = 0;
gpio_init(GPIO1, 20, &config);
/* 2.SPI控制器的初始化 */
spi_init(ECSPI3);
/* 3.icm20608的初始化 */
unsigned char value;
value = icm20608_read_reg(ECSPI3, ICM20608_REG_WHO_AM_I);
printf("ICM20608G ICM20608_REG_WHO_AM_I=0x%02x\r\n", value);
}
unsigned char icm20608_read_reg(ECSPI_Type *base, unsigned char reg)
{
unsigned char rxdata = 0;
reg |= 0x80; /* icmp20608 读,最高位为 1 */
SPI_CSN(0); /* 拉低SPI CS片选信号,选中从设备 */
spi_readwrite_onebyte(base, reg); /* icm20608读,寄存器地址 */
rxdata = spi_readwrite_onebyte(base, 0xFF); /* icm20608读,dummy数据*/
SPI_CSN(1); /* 拉高SPI CS片选信号,去选中从设备 */
return rxdata;
}
void icm20608_write_reg(ECSPI_Type *base, unsigned char reg, unsigned char value)
{
reg &= ~0x80; /* icmp20608 写,最高位清零 */
SPI_CSN(0); /* 拉低SPI CS片选信号,选中从设备 */
spi_readwrite_onebyte(base, reg); /* icm20608写,寄存器地址 */
spi_readwrite_onebyte(base, value); /* icm20608写,数据*/
SPI_CSN(1); /* 拉高SPI CS片选信号,去选中从设备 */
}
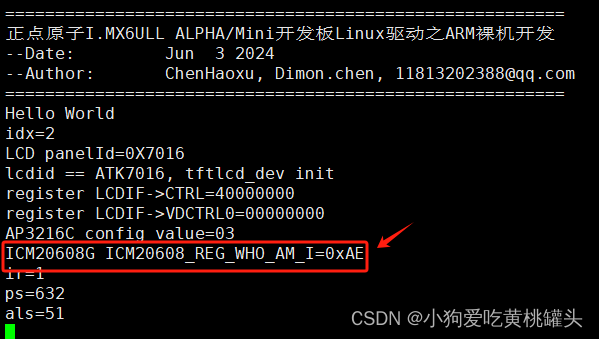
7. 编译烧写SD卡验证结果
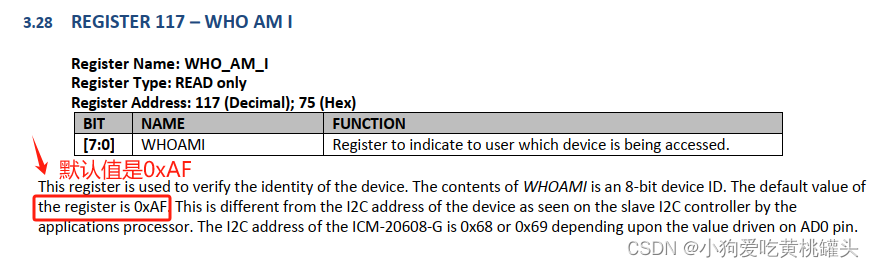
编译源码烧录SD卡验证本节的 I.MX6U I2C驱动实验。预期烧录SD卡后正点原子I.MX6ULL ALPHA/Mini 开发板后,可以通过SPI总线读取到ICM20608 6轴传感器的WHO_AM_I 芯片id,确认spi接口通信是否正常。
我本地验证的结果是可以通过spi接口读取到 icm20608传感器的 who_am_i 寄存器里的芯片id值,并打印到串口,打印出来的值和芯片手册的值一致说明我们的代码spi通信成功。
5. 总结和实验遇到问题记录
本实验通过I.MX6U 的硬件spi接口读取到了 icm20608 6轴传感器的寄存器数据,验证了spi可以正常通信,读取了 icm20608 传感器的 chipid 寄存器并打印到串口。本实验也在I.MX6U ARM裸机的情况下直接通过寄存器的操作来初始化spi硬件接口,在实验过程中也熟悉了spi通信的协议,为之后学习打下了基础。
6. 结束
本文至此结束。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









