






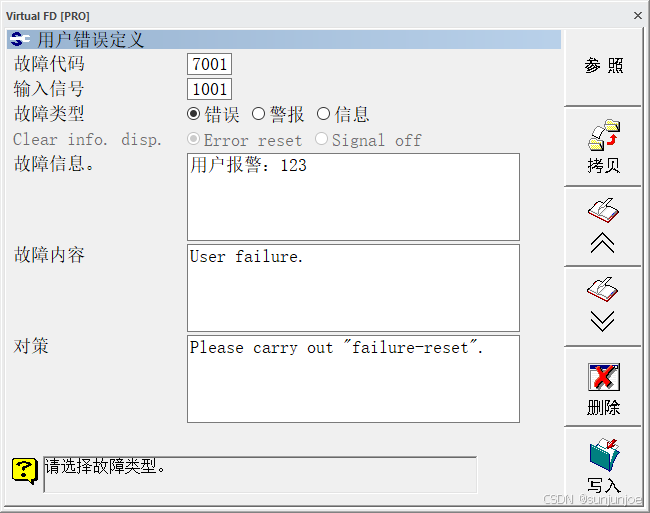
1.设定报警信息
用户通过仿真软件:维修→25 机器人诊断→6 用户错误定义,可以使用7001#~7200#这两百个自定义报警信息,用户对“故障信息”、“故障内容”和“对策”填入相关信息,如下图
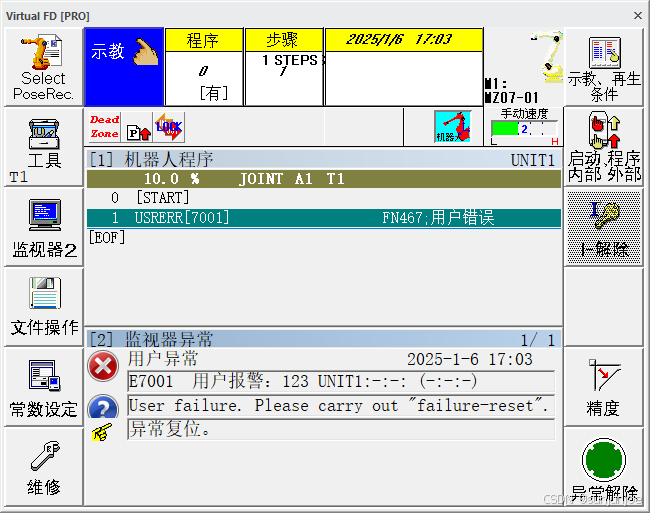
2.“指令”触发方式
可通过指令触发,FN467 USRERR
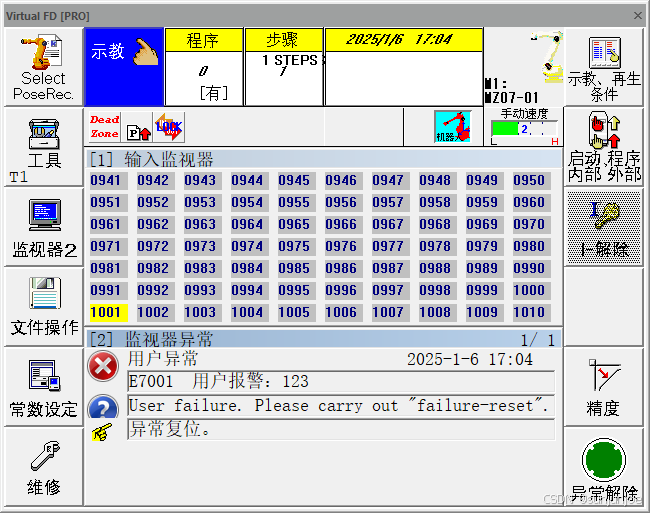
3.“信号”触发
注意:如果通过“输入信号”触发,想要消除该报警时,应先关闭该“输入信号”,再进行“异常复位”
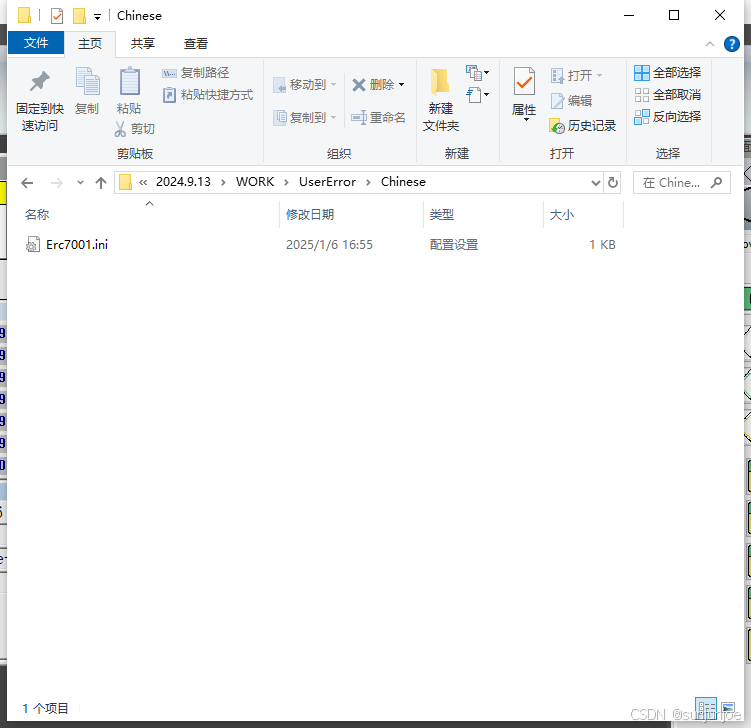
4.通过FTP将用户报警文件导入到控制柜
WORK\UserError\Chinese文件夹中的“Erc7001.ini”文件以FTP功能复制到机器人控制柜对应文件夹中。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









