






二十一点 Blackjack-v0
%matplotlib inline
import numpy as np
np.random.seed(0)
import matplotlib.pyplot as plt
import gym环境使用
env = gym.make("Blackjack-v0")
env.seed(0)
print('观察空间 = {}'.format(env.observation_space))
print('动作空间 = {}'.format(env.action_space))
print('动作数量 = {}'.format(env.action_space.n))观察空间 = Tuple(Discrete(32), Discrete(11), Discrete(2)) 动作空间 = Discrete(2) 动作数量 = 2
在线回合更新
回合更新预测
def ob2state(observation):
return observation[0], observation[1], int(observation[2])
def evaluate_action_monte_carlo(env, policy, episode_num=500000):
q = np.zeros_like(policy)
c = np.zeros_like(policy)
for _ in range(episode_num):
# 玩一回合
state_actions = []
observation = env.reset()
while True:
state = ob2state(observation)
action = np.random.choice(env.action_space.n, p=policy[state])
state_actions.append((state, action))
observation, reward, done, _ = env.step(action)
if done:
break # 回合结束
g = reward # 回报
for state, action in state_actions:
c[state][action] += 1.
q[state][action] += (g - q[state][action]) / c[state][action]
return qpolicy = np.zeros((22, 11, 2, 2))
policy[20:, :, :, 0] = 1 # >= 20 时收手
policy[:20, :, :, 1] = 1 # < 20 时继续
q = evaluate_action_monte_carlo(env, policy) # 动作价值
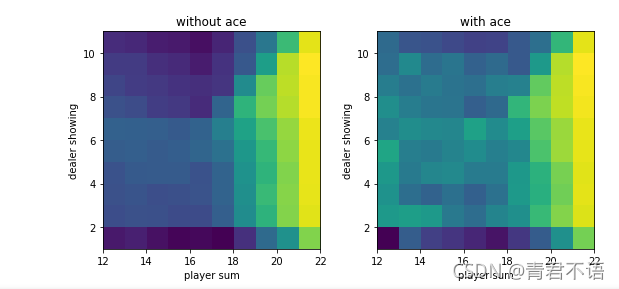
v = (q * policy).sum(axis=-1) # 状态价值def plot(data):
fig, axes = plt.subplots(1, 2, figsize=(9, 4))
titles = ['without ace', 'with ace']
have_aces = [0, 1]
extent = [12, 22, 1, 11]
for title, have_ace, axis in zip(titles, have_aces, axes):
dat = data[extent[0]:extent[1], extent[2]:extent[3], have_ace].T
axis.imshow(dat, extent=extent, origin='lower')
axis.set_xlabel('player sum')
axis.set_ylabel('dealer showing')
axis.set_title(title)def play_once(env, policy=None):
total_reward = 0
observation = env.reset()
print('观测 = {}'.format(observation))
while True:
print('玩家 = {}, 庄家 = {}'.format(env.player, env.dealer))
if policy is None:
action = np.random.choice(env.action_space.n)
print('动作 = {}'.format(action))
observation, reward, done, _ = env.step(action)
print('观测 = {}, 奖励 = {}, 结束指示 = {}'.format(
observation, reward, done))
total_reward += reward
if done:
return total_reward # 回合结束
print("随机策略 奖励:{}".format(play_once(env)))观测 = (11, 10, False) 玩家 = [8, 3], 庄家 = [10, 9] 动作 = 1 观测 = (12, 10, False), 奖励 = 0, 结束指示 = False 玩家 = [8, 3, 1], 庄家 = [10, 9] 动作 = 0 观测 = (12, 10, False), 奖励 = -1.0, 结束指示 = True 随机策略 奖励:-1.0
plot(v)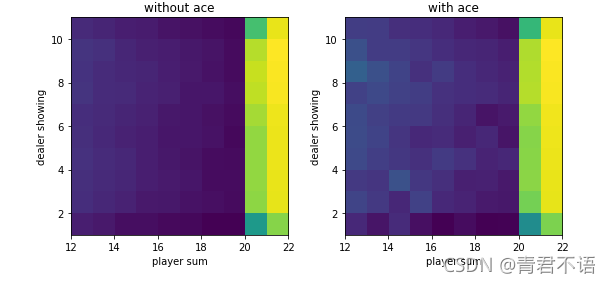
带起始探索的回合更新
def monte_carlo_with_exploring_start(env, episode_num=500000):
policy = np.zeros((22, 11, 2, 2))
policy[:, :, :, 1] = 1.
q = np.zeros_like(policy)
c = np.zeros_like(policy)
for _ in range(episode_num):
# 随机选择起始状态和起始动作
state = (np.random.randint(12, 22),
np.random.randint(1, 11),
np.random.randint(2))
action = np.random.randint(2)
# 玩一回合
env.reset()
if state[2]: # 有A
env.player = [1, state[0] - 11]
else: # 没有A
if state[0] == 21:
env.player = [10, 9, 2]
else:
env.player = [10, state[0] - 10]
env.dealer[0] = state[1]
state_actions = []
while True:
state_actions.append((state, action))
observation, reward, done, _ = env.step(action)
if done:
break # 回合结束
state = ob2state(observation)
action = np.random.choice(env.action_space.n, p=policy[state])
g = reward # 回报
for state, action in state_actions:
c[state][action] += 1.
q[state][action] += (g - q[state][action]) / c[state][action]
a = q[state].argmax()
policy[state] = 0.
policy[state][a] = 1.
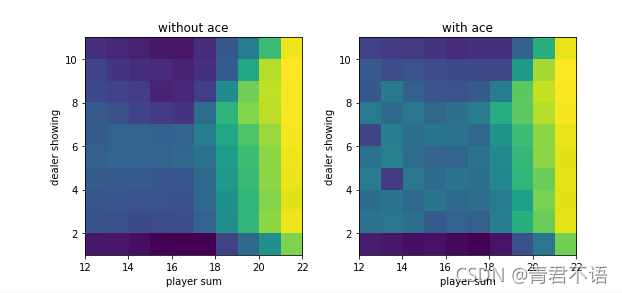
return policy, qpolicy, q = monte_carlo_with_exploring_start(env)
v = q.max(axis=-1)plot(policy.argmax(-1))
plot(v)
基于柔性策略的回合更新
def monte_carlo_with_soft(env, episode_num=500000, epsilon=0.1):
policy = np.ones((22, 11, 2, 2)) * 0.5 # 柔性策略
q = np.zeros_like(policy)
c = np.zeros_like(policy)
for _ in range(episode_num):
# 玩一回合
state_actions = []
observation = env.reset()
while True:
state = ob2state(observation)
action = np.random.choice(env.action_space.n, p=policy[state])
state_actions.append((state, action))
observation, reward, done, _ = env.step(action)
if done:
break # 回合结束
g = reward # 回报
for state, action in state_actions:
c[state][action] += 1.
q[state][action] += (g - q[state][action]) / c[state][action]
# 更新策略为柔性策略
a = q[state].argmax()
policy[state] = epsilon / 2.
policy[state][a] += (1. - epsilon)
return policy, qpolicy, q = monte_carlo_with_soft(env)
v = q.max(axis=-1)plot(policy.argmax(-1))
plot(v)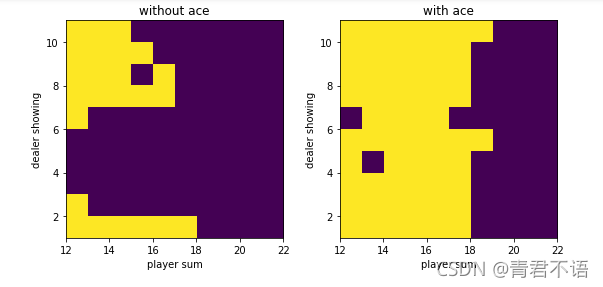
离线回合更新
重要性采样策略评估
def evaluate_monte_carlo_importance_resample(env, policy, behavior_policy,
episode_num=500000):
q = np.zeros_like(policy)
c = np.zeros_like(policy)
for _ in range(episode_num):
# 用行为策略玩一回合
state_actions = []
observation = env.reset()
while True:
state = ob2state(observation)
action = np.random.choice(env.action_space.n,
p=behavior_policy[state])
state_actions.append((state, action))
observation, reward, done, _ = env.step(action)
if done:
break # 玩好了
g = reward # 回报
rho = 1. # 重要性采样比率
for state, action in reversed(state_actions):
c[state][action] += rho
q[state][action] += (rho / c[state][action] * (g - q[state][action]))
rho *= (policy[state][action] / behavior_policy[state][action])
if rho == 0:
break # 提前终止
return qpolicy = np.zeros((22, 11, 2, 2))
policy[20:, :, :, 0] = 1 # >= 20 时收手
policy[:20, :, :, 1] = 1 # < 20 时继续
behavior_policy = np.ones_like(policy) * 0.5
q = evaluate_monte_carlo_importance_resample(env, policy, behavior_policy)
v = (q * policy).sum(axis=-1)plot(v)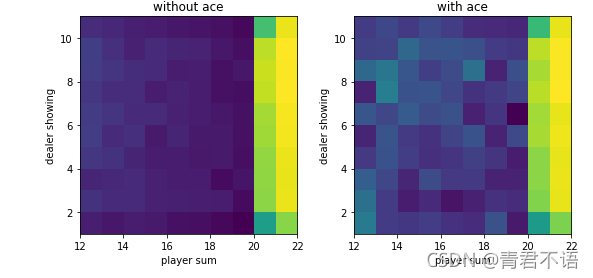
重要性采样回合更新
def monte_carlo_importance_resample(env, episode_num=500000):
policy = np.zeros((22, 11, 2, 2))
policy[:, :, :, 0] = 1.
behavior_policy = np.ones_like(policy) * 0.5 # 柔性策略
q = np.zeros_like(policy)
c = np.zeros_like(policy)
for _ in range(episode_num):
# 用行为策略玩一回合
state_actions = []
observation = env.reset()
while True:
state = ob2state(observation)
action = np.random.choice(env.action_space.n,
p=behavior_policy[state])
state_actions.append((state, action))
observation, reward, done, _ = env.step(action)
if done:
break # 玩好了
g = reward # 回报
rho = 1. # 重要性采样比率
for state, action in reversed(state_actions):
c[state][action] += rho
q[state][action] += (rho / c[state][action] * (g - q[state][action]))
# 策略改进
a = q[state].argmax()
policy[state] = 0.
policy[state][a] = 1.
if a != action: # 提前终止
break
rho /= behavior_policy[state][action]
return policy, qpolicy, q = monte_carlo_importance_resample(env)
v = q.max(axis=-1)plot(policy.argmax(-1))
plot(v)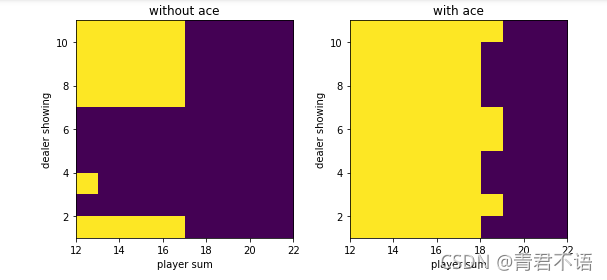

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









