









 本文深入探讨了Linux内核中的shutdown和restart操作,主要通过`reboot`系统调用实现。内核支持多种reboot方式,如RESTART、HALT、CAD_ON/OFF、POWER_OFF、RESTART2、SW_SUSPEND和KEXEC。在用户空间,常用命令如reboot、halt、poweroff调用此系统调用。内核根据命令执行相应的处理函数,如kernel_restart、kernel_halt和kernel_power_off,并通过device_shutdown关闭所有设备。最后,machine-related代码执行实际的重启或关机操作。文章还介绍了设备的类、总线和设备概念,以及在架构层的处理函数machine_restart、machine_halt和machine_power_off。
本文深入探讨了Linux内核中的shutdown和restart操作,主要通过`reboot`系统调用实现。内核支持多种reboot方式,如RESTART、HALT、CAD_ON/OFF、POWER_OFF、RESTART2、SW_SUSPEND和KEXEC。在用户空间,常用命令如reboot、halt、poweroff调用此系统调用。内核根据命令执行相应的处理函数,如kernel_restart、kernel_halt和kernel_power_off,并通过device_shutdown关闭所有设备。最后,machine-related代码执行实际的重启或关机操作。文章还介绍了设备的类、总线和设备概念,以及在架构层的处理函数machine_restart、machine_halt和machine_power_off。
1. 前言
在使用计算机的过程中,关机和重启是最先学会的两个操作。同样,这两个操作在Linux中也存在,称作shutdown和restart。这就是本文要描述的对象。
在Linux Kernel中,主流的shutdown和restart都是通过“reboot”系统调用(具体可参考kernel/reboot.c)来实现的,这也是本文使用“Generic PM之Reboot过程”作为标题的原因。另外,除了我们常用的shutdown和restart两类操作之外,该系统调用也提供了其它的reboot方式,也会在这里一一说明。
2. Kernel支持的reboot方式
也许你会奇怪,reboot是重启的意思,所以用它实现Restart是合理的,但怎么用它实现关机操作呢?答案是这样的:关机之后,早晚也会开机啊!所以关机是一种特殊的Restart过程,只不过持续的时间有点长而已。所以,内核根据不同的表现方式,将reboot分为如下的几种方式:
//include/uapi/linux/reboot.h
/*
* Commands accepted by the _reboot() system call.
*
* RESTART Restart system using default command and mode.
* HALT Stop OS and give system control to ROM monitor, if any.
* CAD_ON Ctrl-Alt-Del sequence causes RESTART command.
* CAD_OFF Ctrl-Alt-Del sequence sends SIGINT to init task.
* POWER_OFF Stop OS and remove all power from system, if possible.
* RESTART2 Restart system using given command string.
* SW_SUSPEND Suspend system using software suspend if compiled in.
* KEXEC Restart system using a previously loaded Linux kernel
*/
#define LINUX_REBOOT_CMD_RESTART 0x01234567
#define LINUX_REBOOT_CMD_HALT 0xCDEF0123
#define LINUX_REBOOT_CMD_CAD_ON 0x89ABCDEF
#define LINUX_REBOOT_CMD_CAD_OFF 0x00000000
#define LINUX_REBOOT_CMD_POWER_OFF 0x4321FEDC
#define LINUX_REBOOT_CMD_RESTART2 0xA1B2C3D4
#define LINUX_REBOOT_CMD_SW_SUSPEND 0xD000FCE2
#define LINUX_REBOOT_CMD_KEXEC 0x45584543
RESTART,正常的重启,也是我们平时使用的重启。执行该动作后,系统会重新启动。
HALT,停止操作系统,然后把控制权交给其它代码(如果有的话)。具体的表现形式,依赖于系统的具体实现。
CAD_ON/CAD_OFF,允许/禁止通过Ctrl-Alt-Del组合按键触发重启(RESTART)动作。
注1:Ctrl-Alt-Del组合按键的响应是由具体的Driver(如Keypad)实现的。
POWER_OFF,正常的关机。执行该动作后,系统会停止操作系统,并去除所有的供电。
RESTART2,重启的另一种方式。可以在重启时,携带一个字符串类型的cmd,该cmd会在重启前,发送给任意一个关心重启事件的进程,同时会传递给最终执行重启动作的machine相关的代码。内核并没有规定该cmd的形式,完全由具体的machine自行定义。
SW_SUSPEND,即前一篇文章中描述的Hibernate操作,会在下一篇文章描述,这里就暂不涉及。
KEXEC,重启并执行已经加载好的其它Kernel Image(需要CONFIG_KEXEC的支持),暂不涉及。
3. Reboot相关的操作流程
在Linux操作系统中,可以通过reboot、halt、poweroff等命令,发起reboot,具体的操作流程如下:
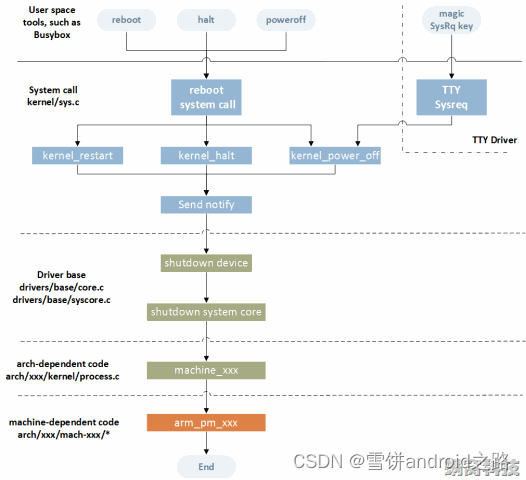
- 一般的Linux操作系统,在用户空间都提供了一些工具集合(如常在嵌入式系统使用的Busybox),这些工具集合包含了reboot、halt和poweroff三个和Reboot相关的命令。读者可以参考man帮助文档,了解这些命令的解释和使用说明
- 用户空间程序通过reboot系统调用,进入内核空间
- 内核空间根据执行路径的不同,提供了kernel_restart、kernel_halt和kernel_power_off三个处理函数,响应用空间的reboot请求
- 这三个处理函数的处理流程大致相同,主要包括:向关心reboot过程的进程发送Notify事件;调用drivers核心模块提供的接口,关闭所有的外部设备;调用drivers syscore模块提供的接口,关闭system core;调用Architecture相关的处理函数,进行后续的处理;最后,调用machine相关的接口,实现真正意义上的Reboot
- 另外,借助TTY模块提供的Sysreq机制,内核提供了其它途径的关机方法,如某些按键组合、向/proc文件写入命令等,后面会详细介绍
4. Reboot过程的内部动作和代码分析
4.1 Reboot系统调用
Reboot系统调用的实现位于“kernel/reboot.c ”,其函数原型如下:
/*
* Reboot system call: for obvious reasons only root may call it,
* and even root needs to set up some magic numbers in the registers
* so that some mistake won't make this reboot the whole machine.
* You can also set the meaning of the ctrl-alt-del-key here.
*
* reboot doesn't sync: do that yourself before calling this.
*/
SYSCALL_DEFINE4(reboot, int, magic1, int, magic2, unsigned int, cmd,
void __user *, arg)
该函数的参数解释如下:
reboot,该系统调用的名称。
magic1、magic2,两个int类型的“魔力数”,用于防止误操作。具体在“include/uapi/linux/reboot.h”中定义,感兴趣的同学可以去看看(话说这些数字还是蛮有意思的,例如Linus同学及其家人的生日就在里面,猜出来的可以在文章下面留言)。
cmd,第2章所讲述的reboot方式。
arg,其它的额外参数。
reboot系统调用的内部动作比较简单:
1)判断调用者的用户权限,如果不是超级用户(superuser),则直接返回错误(这也是我们再用户空间执行reboot、halt、poweroff等命令时,必须是root用户的原因);
2)判断传入的magic number是否匹配,如果不匹配,直接返回错误。这样就可以尽可能的防止误动作发生;
3)调用reboot_pid_ns接口,检查是否需要由该接口处理reboot请求。这是一个有关pid namespaces的新特性,也是Linux内核重要的知识点,我们会在其它文章中描述,这里就不多说了;
4)如果是POWER_OFF命令,且没有注册power off的machine处理函数(pm_power_off),把该命令转换为HALT命令;
5)根据具体的cmd命令,执行具体的处理,包括,
如果是RESTART或者RESTART2命令,调用kernel_restart。
如果是CAD_ON或CAD_OFF命令,更新C_A_D的值,表示是否允许通过Ctrl+Alt+Del组合键重启系统。
如果是HALT命令,调用kernel_halt。
如果是POWER_OFF命令,调用kernel_power_off。
如果是KEXEC命令,调用kernel_kexec接口(暂不在本文涉及)。
如果是SW_SUSPEND,调用hibernate接口(会在下一章描述);
6)返回上述的处理结果,系统调用结束。
4.2 kernel_restart、kernel_halt和kernel_power_off
这三个接口也位于“kernel/reboot.c”,实现比较类似,具体动作包括:
1)调用kernel_xxx_prepare函数,进行restart/halt/power_off前的准备工作,包括,
调用blocking_notifier_call_chain接口,向关心reboot事件的进程,发送SYS_RESTART、SYS_HALT或者SYS_POWER_OFF事件。对RESTART来说,还好将cmd参数一并发送出去。
将系统状态设置为相应的状态(SYS_RESTART、SYS_HALT或SYS_POWER_OFF)。
调用usermodehelper_disable接口,禁止User mode helper(可参考“Linux设备模型(3)_Uevent”相关的描述)。
调用device_shutdown,关闭所有的设备(具体内容会在下一节讲述);
2)如果是power_off,且存在PM相关的power off prepare函数(pm_power_off_prepare),则调用该回调函数;
3)调用migrate_to_reboot_cpu接口,将当前的进程(task)移到一个CPU上;
注2:对于多CPU的机器,无论哪个CPU触发了当前的系统调用,代码都可以运行在任意的CPU上。这个接口将代码分派到一个特定的CPU上,并禁止调度器分派代码到其它CPU上。也就是说,这个接口被执行后,只有一个CPU在运行,用于完成后续的reboot动作。
4)调用syscore_shutdown接口,将系统核心器件关闭(例如中断等);
5)调用printk以及kmsg_dump,向这个世界发出最后的声音(打印日志);
6)最后,由machine-core的代码,接管后续的处理。
4.3 device_shutdown
在理解device_shutdown之前,我们需要回忆一下前几篇有关Linux设备模型的文章。同时,借助对电源管理的解析,我们会把在Linux设备模型系列文章中没有描述的部分补回来。设备模型中和device_shutdown有关的逻辑包括:
- 每个设备(struct device)都会保存该设备的驱动(struct device_driver)指针,以及该设备所在总线(struct bus_type)的指针(具体参考“Linux设备模型(5)_device和device driver”)
- 设备驱动中有一个名称为“shutdown”的回调函数,用于在device_shutdown时,关闭该设备(具体参考“Linux设备模型(5)_device和device driver”)
- 总线中也有一个名称为“shutdown”的回调函数,用于在device_shutdown时,关闭该设备(具体参考“Linux设备模型(6)_Bus”)
- 系统的所有设备,都存在于“/sys/devices/”目录下,而该目录由名称为“devices_kset”的kset表示。而由“Linux设备模型(2)_Kobject”的描述可知,kset中会使用一个链表保存其下所有的kobject(也即“/sys/devices/”目录下的所有设备)。最终的结果就是,以“devices_kset”为root节点,将内核中所有的设备(以相应的kobject为代表),组织成一个树状结构
介绍完以上的背景知识,我们来看device_shutdown的实现,就非常容易了。该接口位于“drivers/base/core.c”中,执行逻辑如下。
/**
* device_shutdown - call ->shutdown() on each device to shutdown.
*/
void device_shutdown(void)
{
struct device *dev, *parent;
wait_for_device_probe();
device_block_probing();
cpufreq_suspend();
spin_lock(&devices_kset->list_lock);
/*
* Walk the devices list backward, shutting down each in turn.
* Beware that device unplug events may also start pulling
* devices offline, even as the system is shutting down.
*/
while (!list_empty(&devices_kset->list)) {
dev = list_entry(devices_kset->list.prev, struct device,
kobj.entry);
/*
* hold reference count of device's parent to
* prevent it from being freed because parent's
* lock is to be held
*/
parent = get_device(dev->parent);
get_device(dev);
/*
* Make sure the device is off the kset list, in the
* event that dev->*->shutdown() doesn't remove it.
*/
list_del_init(&dev->kobj.entry);
spin_unlock(&devices_kset->list_lock);
/* hold lock to avoid race with probe/release */
if (parent)
device_lock(parent);
device_lock(dev);
/* Don't allow any more runtime suspends */
pm_runtime_get_noresume(dev);
pm_runtime_barrier(dev);
if (dev->class && dev->class->shutdown_pre) {
if (initcall_debug)
dev_info(dev, "shutdown_pre\n");
dev->class->shutdown_pre(dev);
}
if (dev->bus && dev->bus->shutdown) {
if (initcall_debug)
dev_info(dev, "shutdown\n");
dev->bus->shutdown(dev);
} else if (dev->driver && dev->driver->shutdown) {
if (initcall_debug)
dev_info(dev, "shutdown\n");
dev->driver->shutdown(dev);
}
device_unlock(dev);
if (parent)
device_unlock(parent);
put_device(dev);
put_device(parent);
spin_lock(&devices_kset->list_lock);
}
spin_unlock(&devices_kset->list_lock);
}
1)遍历devices_kset的链表,取出所有的设备(struct device);
2)将该设备从链表中删除;
3)调用pm_runtime_get_noresume和pm_runtime_barrier接口,停止所有的Runtime相关的电源管理动作(后续的文章会详细描述有关Runtime PM的逻辑);
4)如果该设备的bus提供了shutdown函数,优先调用bus的shutdown,关闭设备;
5)如果bus没有提供shutdown函数,检测设备driver是否提供,如果提供,调用设备driver的shutdown,关闭设备;
6)直至处理完毕所有的设备。
类:设备的类用于组织设备的通用属性和行为。例如,所有存储设备可能属于 "storage" 类,所有网络设备可能属于 "net" 类。
一个例子是 bluetooth 类,它用于组织所有蓝牙设备。
struct class bluetooth_class = {
.name = "bluetooth",
.owner = THIS_MODULE,
.dev_release = bluetooth_release,
};
总线:设备的总线用于将设备连接到主机并进行通信。例如,USB 总线用于将 USB 设备连接到计算机,而 PCI 总线用于将 PCI 设备连接到计算机。
一个例子是 pci_bus_type,它用于组织所有 PCI 设备。
static const struct bus_type pci_bus_type = {
.name = "pci",
.match = pci_bus_match,
.uevent = pci_uevent,
.probe = pci_device_probe,
.remove = pci_device_remove,
.shutdown = pci_device_shutdown,
.dev_groups = pci_dev_groups,
};
设备:设备是操作系统中的硬件或软件元素,例如磁盘驱动器、网络接口卡或图形处理器。
一个例子是 sda 设备,它代表第一个 SATA 硬盘驱动器。
static struct device sda_device = {
.init_name = "sda",
.bus = &scsi_bus_type,
.parent = &scsi_host,
.release = scsi_disk_release,
};
syscore_shutdown
system core的shutdown和设备的shutdown类似,也是从一个链表中,遍历所有的system core,并调用它的shutdown接口。后续蜗蜗会专门写一篇文章介绍syscore,这里暂不描述。
4.5 machine_restart、machine_halt和machine_power_off
虽然以machine_为前缀命名,这三个接口却是属于Architecture相关的处理函数,如ARM。以ARM为例,它们在“arch/arm/kernel/process.c”中实现,具体如下。
4.5.1 machine_restart
// arch/arm64/kernel/process.c
void machine_restart(char *cmd)
{
/* Disable interrupts first */
local_irq_disable();
smp_send_stop();
/*
* UpdateCapsule() depends on the system being reset via
* ResetSystem().
*/
if (efi_enabled(EFI_RUNTIME_SERVICES))
efi_reboot(reboot_mode, NULL);
/* Now call the architecture specific reboot code. */
do_kernel_restart(cmd);
/*
* Whoops - the architecture was unable to reboot.
*/
printk("Reboot failed -- System halted\n");
while (1);
}
0)先转述一下该接口的注释;
对于多CPU的机器来说,Restart之前必须保证其它的CPU处于非活动状态,由其中的一个主CPU负责Restart动作。并且,必须实现一个基于硬件的Restart操作,以保证所有CPU同步Restart,这是设计的重点!
对于单CPU机器来说,就相对简单了,可以直接用软件reset的方式实现Restart。
1)调用smp_send_stop接口,确保其它CPU处于非活动状态;
2)调用machine-dependent的restart接口,实现真正的restart。该接口是一个回调函数,由“arch/arm/kernel/process.c”声明,由具体的machine代码实现。格式如下:
void (*arm_pm_restart)(char str, const char *cmd) = null_restart;
EXPORT_SYMBOL_GPL(arm_pm_restart);
3)等待1s;
4)如果没有返回,则restart成功,否则失败,打印错误信息。
4.5.2 machine_halt
ARM的halt很简单,就是将其它CPU停下来,并禁止当前CPU的中断后,死循环!确实,中断被禁止了,又死循环了,不halt才怪。代码如下:
/*
* Halting simply requires that the secondary CPUs stop performing any
* activity (executing tasks, handling interrupts). smp_send_stop()
* achieves this.
*/
void machine_halt(void)
{
local_irq_disable();
smp_send_stop();
while (1);
}
4.5.3 machine_power_off
/*
* Power-off simply requires that the secondary CPUs stop performing any
* activity (executing tasks, handling interrupts). smp_send_stop()
* achieves this. When the system power is turned off, it will take all CPUs
* with it.
*/
void machine_power_off(void)
{
local_irq_disable();
smp_send_stop();
if (pm_power_off)
pm_power_off();
}
power off动作和restart类似,即停止其它CPU,调用回调函数。power off的回调函数和restart类似,就不再说明了。
5. 总结与思考
5.1 Architecture和Machine的概念
本文是我们在分析Linux内核时第一次遇到Architecture和Machine的概念,顺便解释一下。内核代码中最常见的目录结构就是:arch/xxx/mach-xxx/(例如arch/arm/mach-bcm/)。由该目录结构可知,Architecture(简称arch)是指具体的体系结构,如ARM、X86等等。Machine呢,是指具体体系结构下的一个或一系列的SOC,如bcm等。
5.2 电源管理驱动(和reboot有关的部分)需要实现内容
由上面的分析可知,在Reboot的过程中,大部分的逻辑是否内核处理的,具体的driver需要关注2点即可:
1)实现各自的shutdown接口,以正确关闭对应的设备
2)实现machine-dependent的接口,以确保底层的Machine可以正确restart或者power off
看来还是很简单的。
| 参考链接 |
| Linux电源管理(3)_Generic PM之Reboot过程 |

















 453
453

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









