





一、元器件介绍
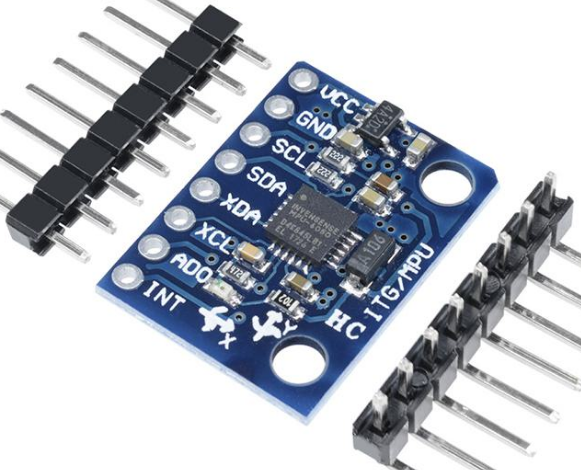
MPU-6050是InvenSense公司生产的一款六轴运动处理器,集成了3轴加速度计和3轴陀螺仪;内置的数字运动处理器(DMP)可以实现高级运动处理功能,如六轴运动融合、姿态估计等。这款传感器广泛应用于运动控制和测量领域,如无人机、智能手机、运动手环等。
- 通信接口:I2C(双线串行接口)
- 测量范围
加速度计测量范围:±2g、±4g、±8g、±16g(可配置)
加速度计灵敏度:16384 LSB/g(±2g)、8192 LSB/g(±4g)、4096 LSB/g(±8g)、2048 LSB/g(±16g)
陀螺仪测量范围:±250°/s、±500°/s、±1000°/s、±2000°/s(可配置)
陀螺仪灵敏度:131 LSB/°/s(±250°/s)、65.5 LSB/°/s(±500°/s)、32.8 LSB/°/s(±1000°/s)、16.4 LSB/°/s(±2000°/s)
- 分辨率
加速度计:16位ADC(模拟数字转换器)
陀螺仪:16位ADC
- 自带一个数字温度传感器,用于自身温度检查;
- 可程序控制的中断(interrupt),支持姿势识别、摇摄、画面放大缩小、滚动、快速下降中断、high-G 中断、零动作感应、触击感应、摇动感应功能。
1、针脚用途
编号 | 名称 | 功能 |
1 | VCC | 电源正 |
2 | GND | 电源地 |
3 | SCL | IIC通讯时钟引脚 |
4 | SDA | IIC通讯数据引脚 |
5 | XDA | 外接IIC设备数据引脚 |
6 | XCL | 外接IIC设备时钟引脚 |
7 | ADD | IIC从地址LSB |
8 | INT | 用于指示数据准备就绪的中断引脚 |
二、示例代码
1、代码:
mpu6050元器件的针脚 | ESP32模块的针脚 |
VCC(红色) | 3V3 |
GND(黑色) | GND |
SCL(绿色) | IO22;Output |
SDA(黄色) | IO21;Input |
XDA | |
XCL | |
ADD | |
INT | |
2、计算欧拉角
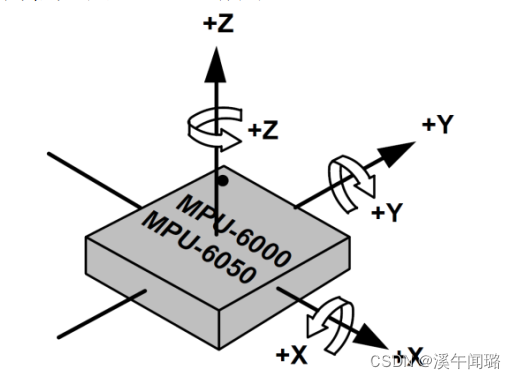
Euler欧拉角(姿态角):机体坐标系与地面坐标系的关系是三个角,反应了飞机相对地面的姿态:
- 横滚角Φ(roll):绕X轴旋转。横滚角是指运载体横轴与水平线之间的夹角。也叫滚转角,代表运载体绕纵轴的转动,绕纵轴轴向顺时针转动为正,否则为负,可以想象成飞机做翻滚运动。
- 俯仰角θ(pitch):绕Y轴旋转。机体坐标系x轴与水平面的夹角,俯仰角在水平面上面为正,否则为负,可以想象成飞机抬头向上与俯冲向下。
- 偏航角ψ(yaw):绕Z轴旋转。相对于纵轴的旋转角度,改变偏航角可以改变飞机的飞行方向,机头往右为正,这个跟平时开车,左转弯右转弯一样
作者:꧁执笔小白꧂















 3661
3661

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









