







车辆动态控制系统(Vehicle Dynamics Control, VDC)是一种集成多种控制模块和算法的复杂系统,旨在提升车辆行驶稳定性、操控性和安全性。以下从功能、技术实现、厂商应用及使用注意事项等方面详细解析:
一、核心功能
-
稳定性控制
- 通过整合ABS(防抱死制动系统)、TCS(牵引力控制系统)、BLSD(制动式防滑差速器)等功能,实时监测车轮转速、方向盘角度、侧向加速度等参数,动态调整各车轮制动力和发动机功率输出,防止转向不足或过度。
- 例如,Nissan的VDC系统在过弯时介入控制车身姿态,确保湿滑路面或紧急转向时的安全性。
-
动态轨迹跟踪
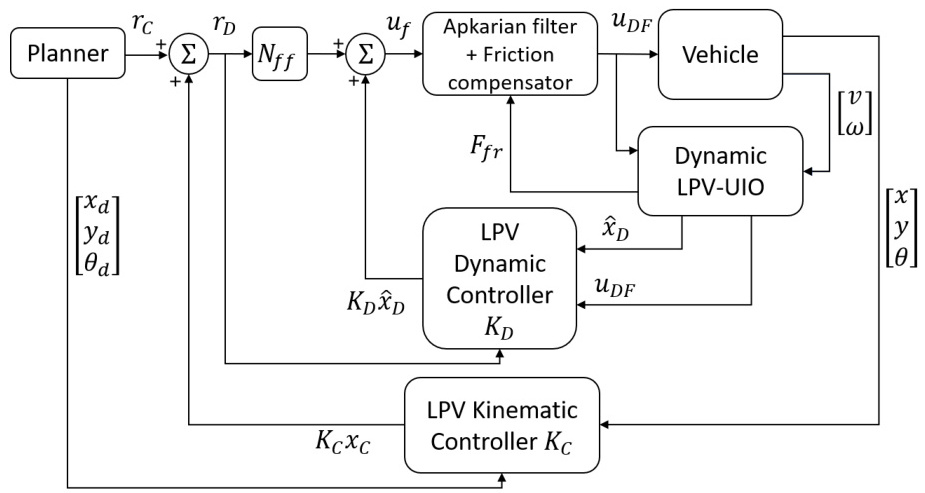
- 通过路径/速度规划模块生成目标轨迹,结合车辆动力学模型和反馈控制(如神经网络PID控制器、LQR控制器),分配轮胎力并调整执行器动作(如转向角、扭矩),实现精确路径跟踪。
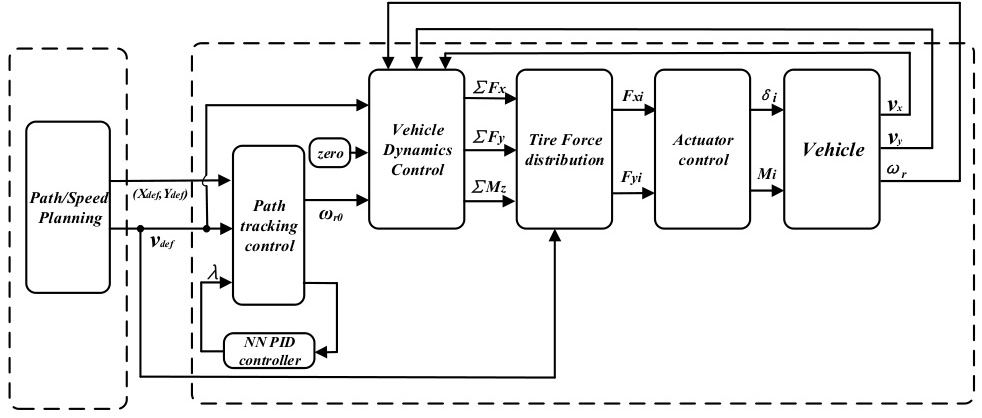
- 通过路径/速度规划模块生成目标轨迹,结合车辆动力学模型和反馈控制(如神经网络PID控制器、LQR控制器),分配轮胎力并调整执行器动作(如转向角、扭矩),实现精确路径跟踪。
-
智能扭矩分配
- 采用扭矩矢量(Torque Vectoring)技术,根据车辆状态(如车速、附着系数)独立调节各车轮扭矩,优化操控性。例如,法拉利的动态强化系统(FDE)通过调节制动压力实现横向稳定。
二、技术实现
-
控制算法
-
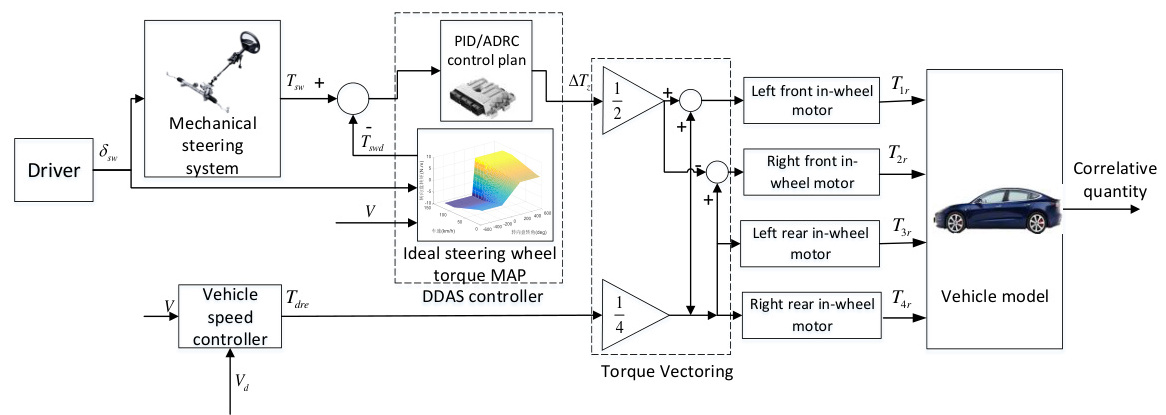
PID/ADRC控制器:用于转向力矩调节,结合理想扭矩映射表(MAP)优化响应。
-
模型预测控制(MPC) :基于非线性或线性化车辆模型,预测并调整前轮转向角,适应低附着力路面(如冰面)。
-
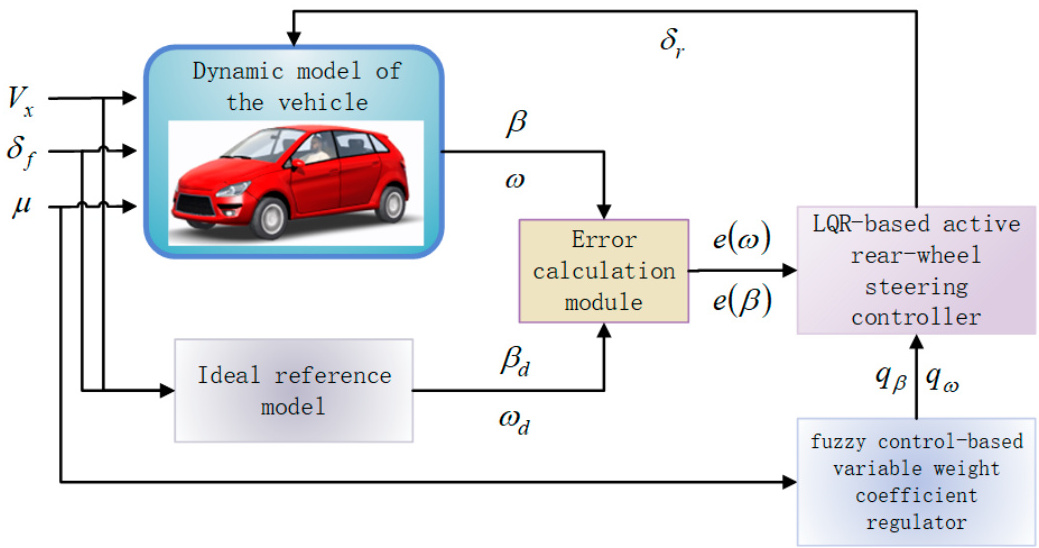
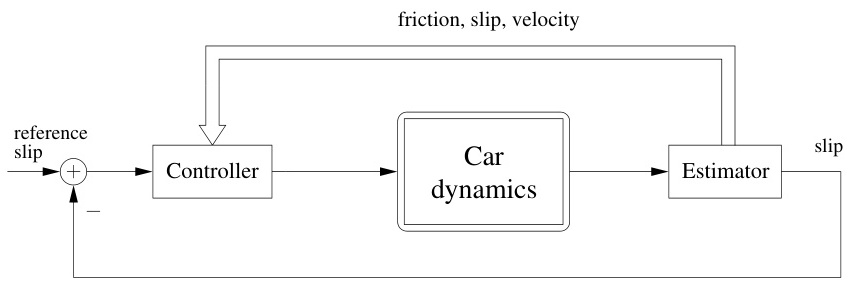
模糊控制与LQR:通过误差信号和可变权重系数调节,优化后轮转向角以提高稳定性。
-
-
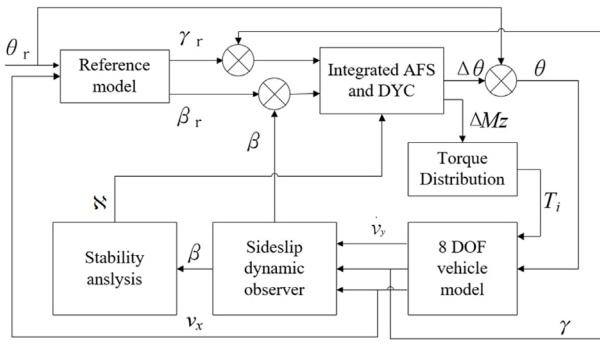
多模块协同
- 系统通常包含动态车辆模型、传感器数据融合(如陀螺仪、轮速传感器)、执行器控制(如制动、转向)等模块,通过共享内存或总线通信实现闭环控制。
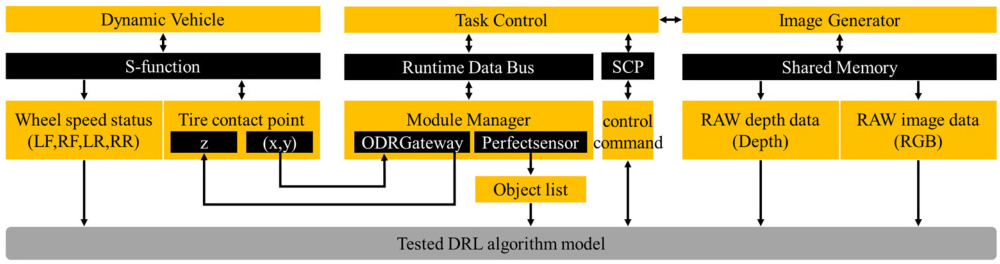
例如,集成主动前轮转向(AFS)与动态横摆控制(DYC),通过目标角度与实时状态反馈调整力矩分配。
- 系统通常包含动态车辆模型、传感器数据融合(如陀螺仪、轮速传感器)、执行器控制(如制动、转向)等模块,通过共享内存或总线通信实现闭环控制。
-
硬件支持
- 依赖高精度传感器(如轮速、侧滑角监测)和快速响应的执行机构(如电控转向、制动卡钳)。
SUBARU手册强调轮胎一致性对系统性能的影响,需避免使用临时备胎。
- 依赖高精度传感器(如轮速、侧滑角监测)和快速响应的执行机构(如电控转向、制动卡钳)。
三、厂商应用与案例
-
Nissan/Infiniti
- VDC系统最早于1998年应用于Cima车型,现为多款车型(如Infiniti Q45、FX35)标配,通过独立制动和动力调节维持稳定。
-
法拉利
- 6.0版侧滑角控制系统(SSC)整合动态强化系统(FDE),在Race模式下通过液压制动压力快速调节车轮扭矩,优化横向动态。
-
BMW/SUBARU
- BMW的动态驾驶控制系统提供多种模式(舒适/运动),调节悬架、变速箱响应和稳定性阈值;SUBARU系统在雪地或泥泞路面可临时停用以允许车轮滑移,但需注意关闭后性能下降。
四、使用注意事项
-
特殊场景操作
- 雪地轮胎或冬季轮胎可能改变转向手感,需谨慎驾驶;系统停用后车辆性能近似无VDC状态,非必要不建议关闭。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











