







运动模糊图像场景重建技术(如BAD-Gaussians)的核心是通过显式建模相机运动轨迹与场景几何的联合优化,实现对模糊图像的高质量三维重建和实时渲染。以下是该技术的详细解析:
一、技术原理与创新点
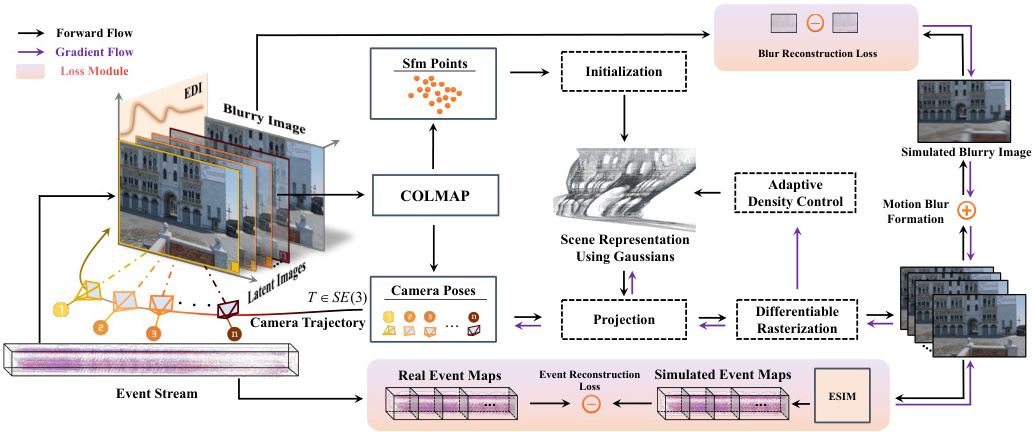
BAD-Gaussians(Bundle Adjusted Deblur Gaussian Splatting)的核心创新在于将显式高斯表示与相机运动模糊的物理建模相结合,具体包括:
- 显式高斯表示:与NeRF的隐式神经场不同,BAD-Gaussians通过优化点云作为高斯球体(3D高斯椭球)来显式表示场景几何,这种表示能更精准地捕捉细节,且支持实时渲染(30 FPS以上)。
- 相机轨迹建模:在SE(3)空间中采用立方B样条插值(Cubic B-spline),通过4个控制节点描述相机在曝光时间内的连续运动轨迹。相比线性插值,这种方法能模拟更复杂的运动模式(如加速、旋转),并与高斯参数联合优化。
- 物理成像过程模拟:通过沿轨迹投影高斯球体并平均合成模糊图像,最小化合成图像与输入模糊图像的差异,从而同时恢复场景几何和相机运动。
- 束调整优化:引入光度束调整公式(Photometric Bundle Adjustment),在3D高斯拼接框架内实现运动模糊图像的实时渲染,这是首次将束调整与高斯溅射技术结合。
二、技术实现流程
- 数据准备:支持合成数据集(如Deblur-NeRF)和真实数据集(如动态模糊视频),需通过COLMAP初始化粗略相机位姿。
- 训练优化:
- 相机轨迹参数化:选择线性或立方B样条插值模式,通过虚拟相机数量(如15个)提高轨迹建模精度。
- 联合优化目标:最小化合成模糊图像与输入图像的L1损失,同时引入时序平滑损失防止相邻子帧的不连续。
- 正则化策略:例如高斯密度退火,避免因初始位姿不准确导致的局部最优。
- 渲染与输出:通过
ns-render命令生成去模糊视频,支持导出3D高斯数据(.ply格式)供其他工具可视化。
三、性能优势
- 渲染质量:在Deblur-NeRF合成和真实数据集上,PSNR和SSIM指标均超越BAD-NeRF等传统方法,尤其在恢复高频细节(如纹理、边缘)上表现突出。
- 实时性:显式高斯表示使训练速度比NeRF快10倍以上,且支持实时渲染(如30 FPS),适用于AR/VR等交互场景。
- 鲁棒性:可处理严重模糊(如长曝光导致的运动模糊)和不准确相机位姿输入,对低光照条件适应性较强。
四、应用场景
- 自动驾驶:用于4D场景重建(动态物体轨迹建模),满足实时环境感知需求。
- 影视与游戏:修复运动模糊镜头并生成新视角,例如从模糊历史影像重建建筑3D模型。
- 机器人导航:在快速移动或弱光条件下恢复清晰环境结构,提升SLAM系统的鲁棒性。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











