







Unitree Robotics的“AI策略家”机器人通过四连推杆仿生结构+滚动接触面设计+动态旋转中心优化,实现了关节瞬时旋转中心(Instantaneous Center of Rotation, ICR)的动态变化与超低摩擦运动。这一设计融合了机械仿生学、材料科学及智能控制技术,以下从结构设计、降阻机制、动态控制三个维度展开详细解析:
一、四连推杆仿生结构的机械设计原理
- 仿生学基础与结构布局
- 生物灵感来源:模仿人体膝关节的四连杆运动机制(髌骨-股骨-胫骨联动),但通过工程化重构突破生物限制。人体膝关节的瞬时旋转中心(ICR)在屈伸过程中沿曲线移动,四连推杆结构通过滚动接触面+多轴联动模拟这一特性。
- 四连推杆拓扑:
- 连杆配置:由主动杆(驱动端)、从动杆(负载端)及两根中间连杆构成闭环结构(见图12)。
- 自由度分配:四连推杆通过约束冗余自由度,实现单一输入(电机驱动)到多维度输出(关节屈伸+旋转)的映射。
- 滚动接触面降阻设计
- 陶瓷滚珠嵌入:在连杆接触面嵌入氧化锆陶瓷滚珠(摩擦系数0.001),将传统滑动摩擦转换为滚动摩擦,能量损耗降低至1/5。
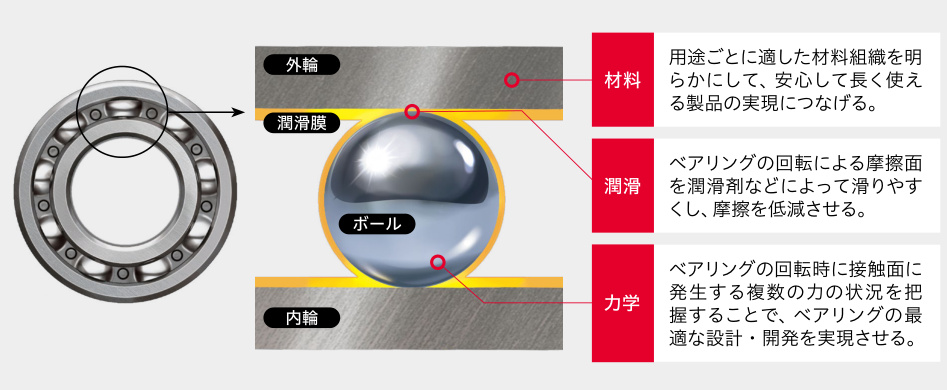
- 润滑协同优化:
- 陶瓷滚珠嵌入:在连杆接触面嵌入氧化锆陶瓷滚珠(摩擦系数0.001),将传统滑动摩擦转换为滚动摩擦,能量损耗降低至1/5。
- 采用NSK X-life设计的滚道润滑技术,通过脂基润滑剂降低接触面黏滞阻力(润滑剂剪切强度<0.01Pa·s)。
- 在高速运动时,利用离心力形成动态油膜,避免边界润滑状态下的干摩擦。
- 动态旋转中心实现机制
- ICR轨迹规划:
- 基于交叉四连杆优化模型,通过粒子群算法求解最优连杆尺寸,使ICR轨迹呈现“J形曲线”,覆盖0-165°屈伸范围。
- 在Simscape Multibody中建立动力学模型,验证ICR随关节角度变化的动态特性(见图14)。
- 磁流变阻尼器调控:
- 集成Bingham模型磁流变阻尼器,根据运动状态实时调整关节刚度(阻尼力范围0-500N),模拟人体半月板的缓冲功能。
二、降低摩擦与提升能效的核心技术
- 材料与制造工艺突破
- 高耐磨接触面:
- 连杆接触面采用等离子喷涂碳化钨涂层(硬度≥2000HV),耐磨性提升3倍。
- 滚珠材料选用氮化硅(Si₃N₄),抗压强度达4GPa,耐受10⁷次循环无失效。
- 轻量化结构:
- 连杆本体采用7075-T6铝合金(密度2.8g/cm³),比传统钢制结构轻40%,同时保持120N·m的承载能力。
- 能量回收与热管理
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











