







玩转ENC编码器之将编码器作为转换器使用
今天有客户问,想将ENC设备作为转换器使用,能实现吗? 并且给出了一个图,来看看吧:
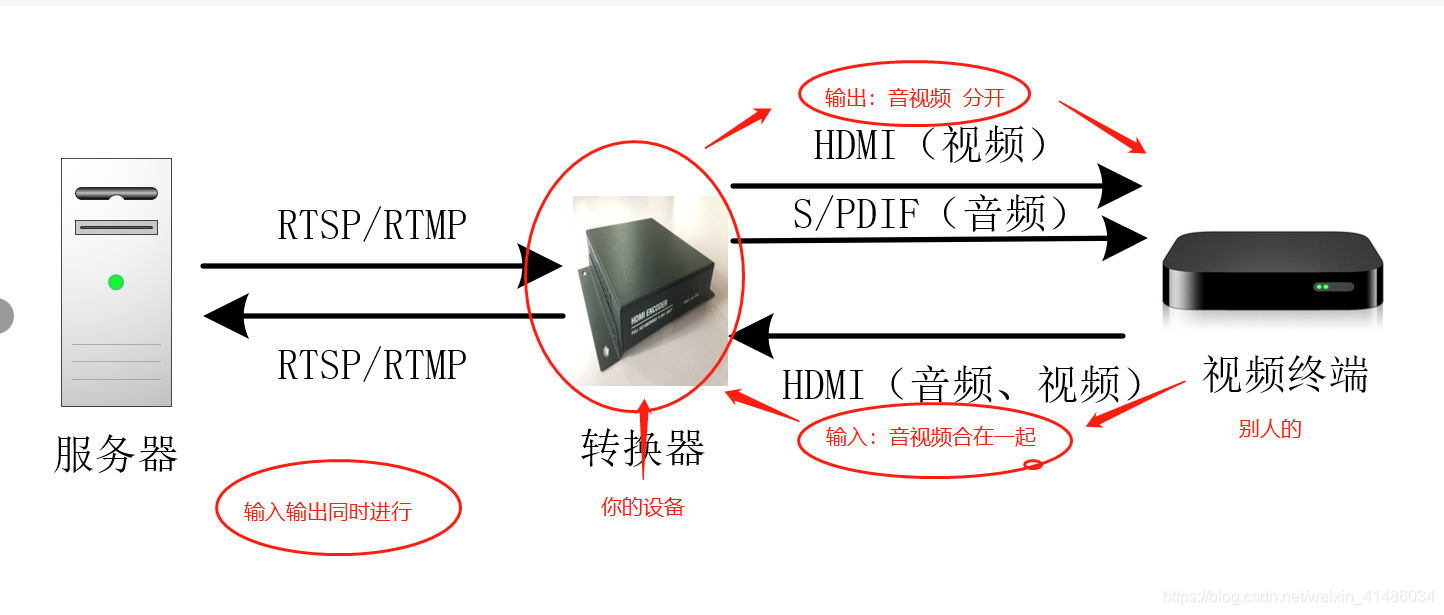
首先,赞一下,上图画的非常好,ENC1设备是非常灵活的,请看下图:
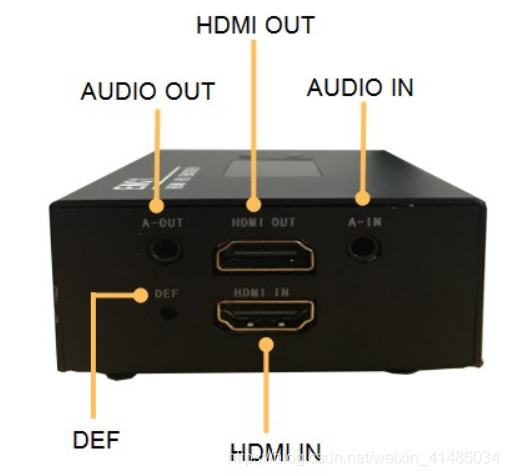
接口出来了,就好说明了,只需要稍作配置,就可以实现HDMI或者来自网络的RTMP流的音频分出来从AUDIO-OUT出去了。以下是客户提供的配置过程,希望给大家做个参考:
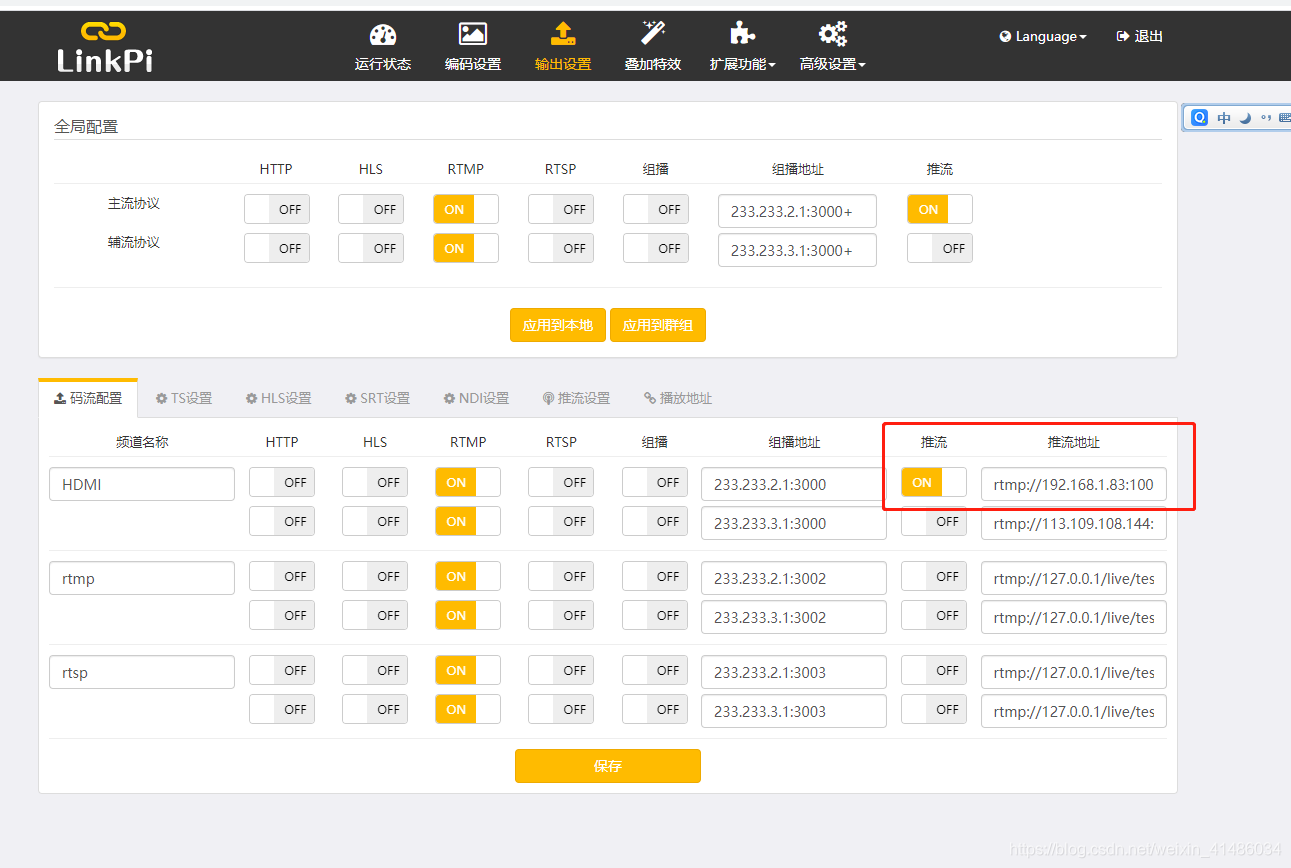
1、制定网络输入源
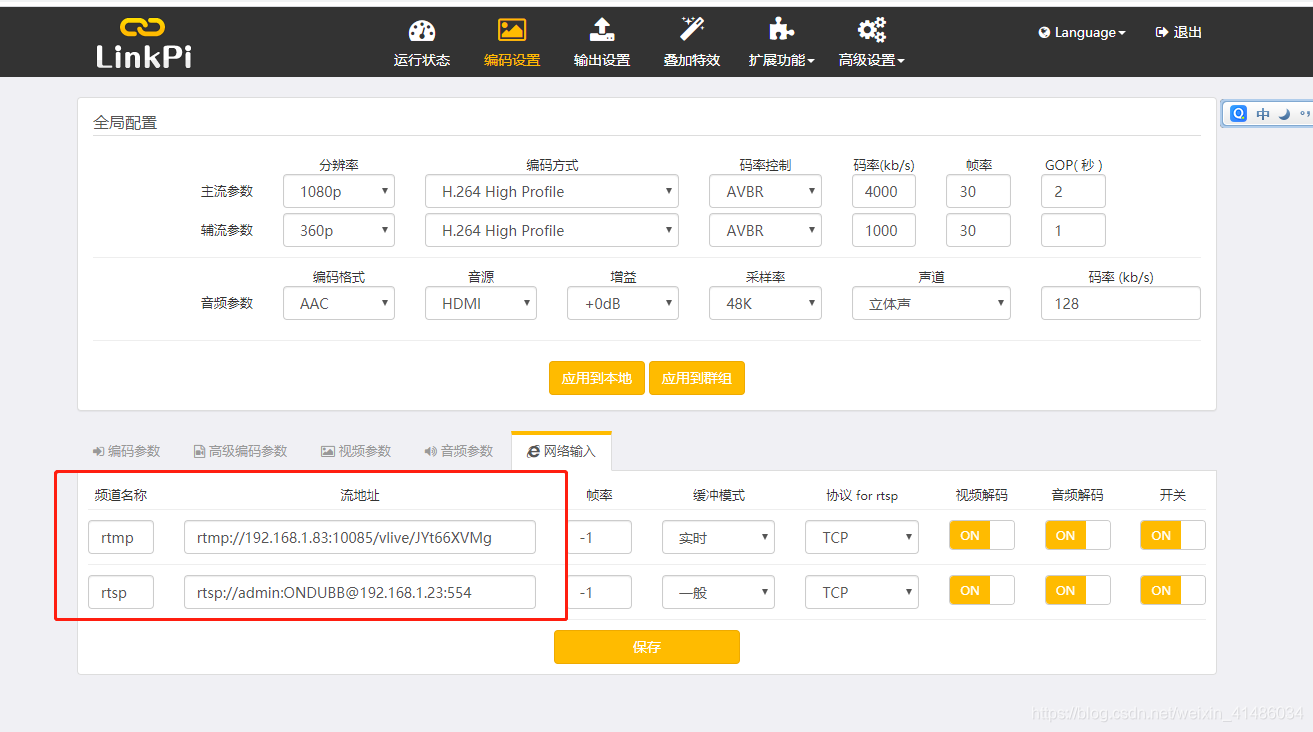
2、设置输入
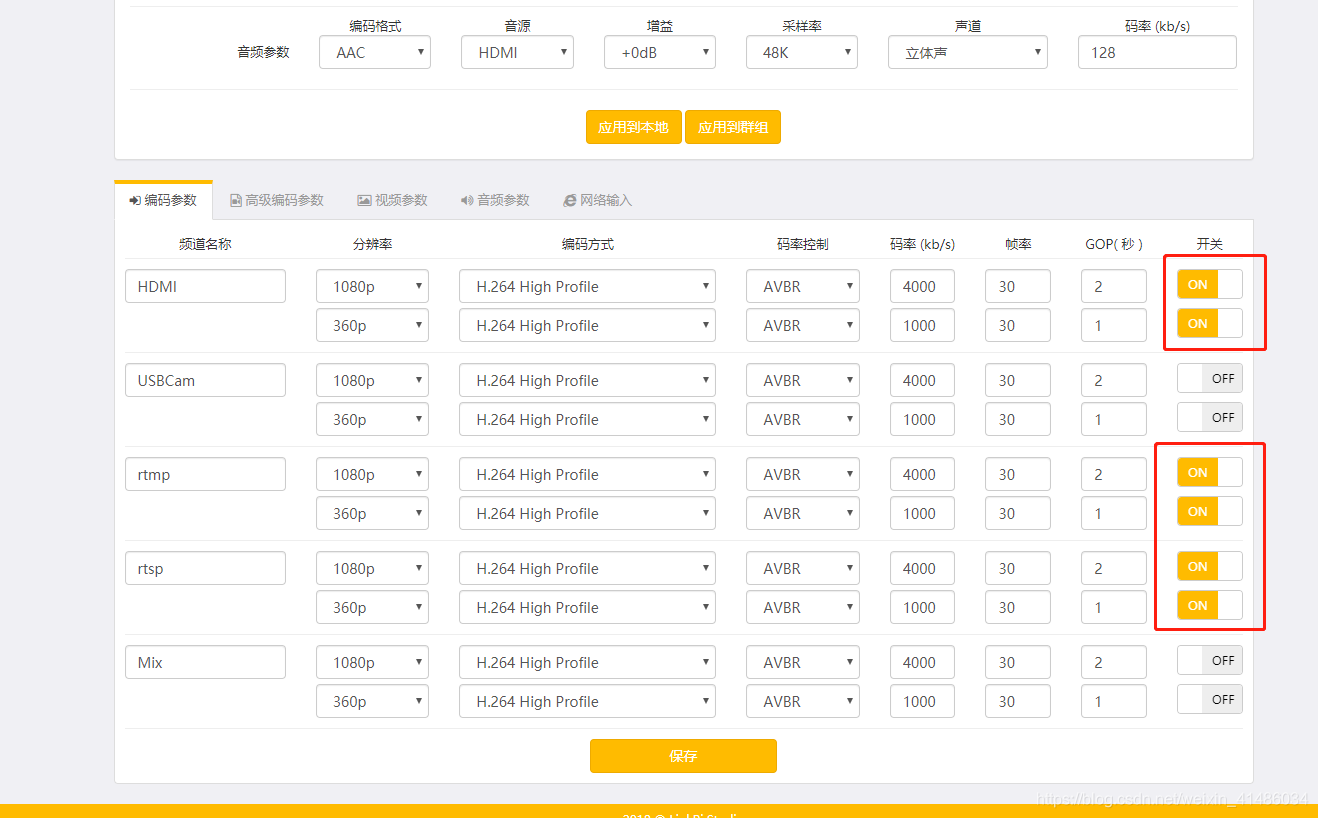
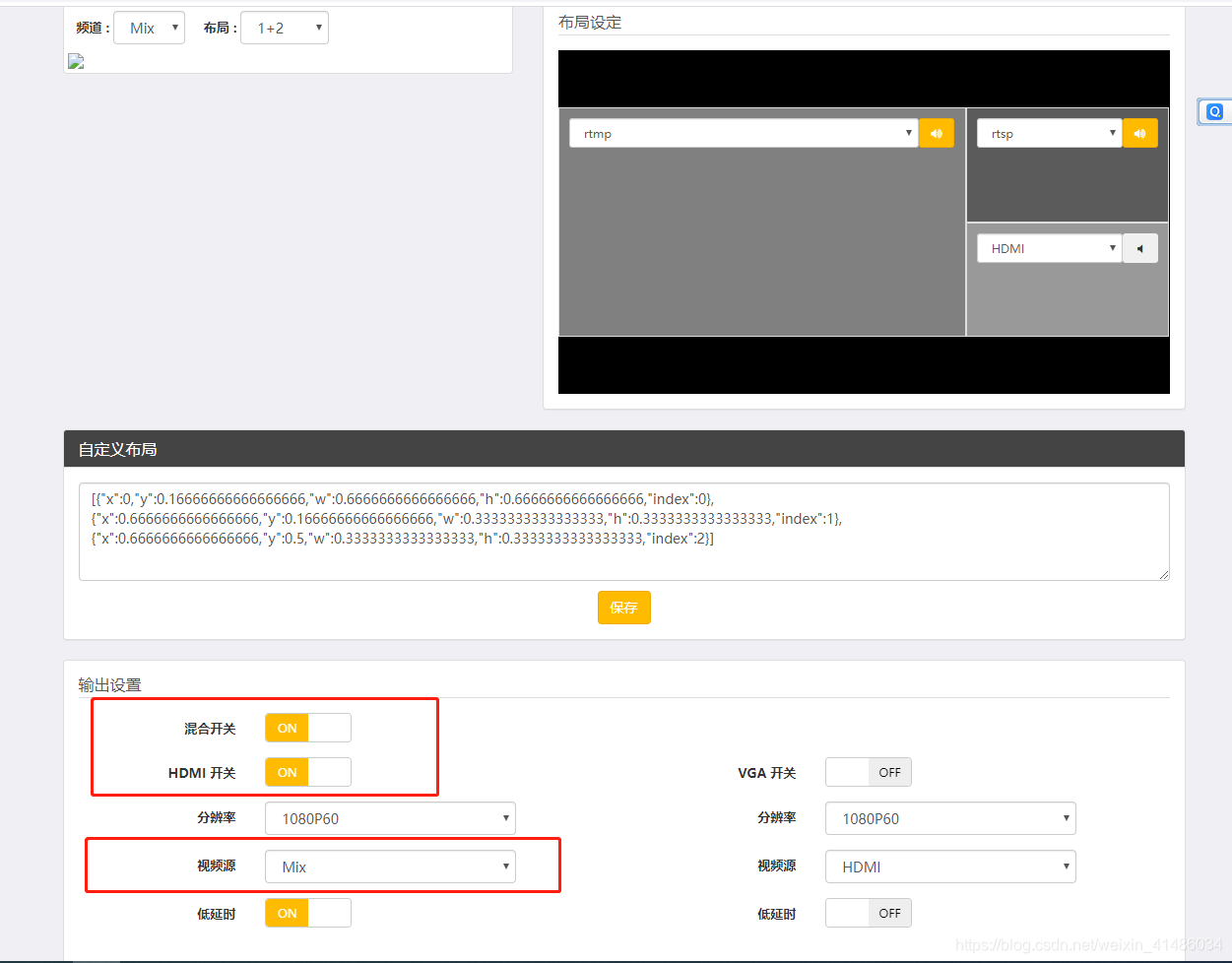
3、设置输出
4、设置MIX
最后来一张预览状态图:
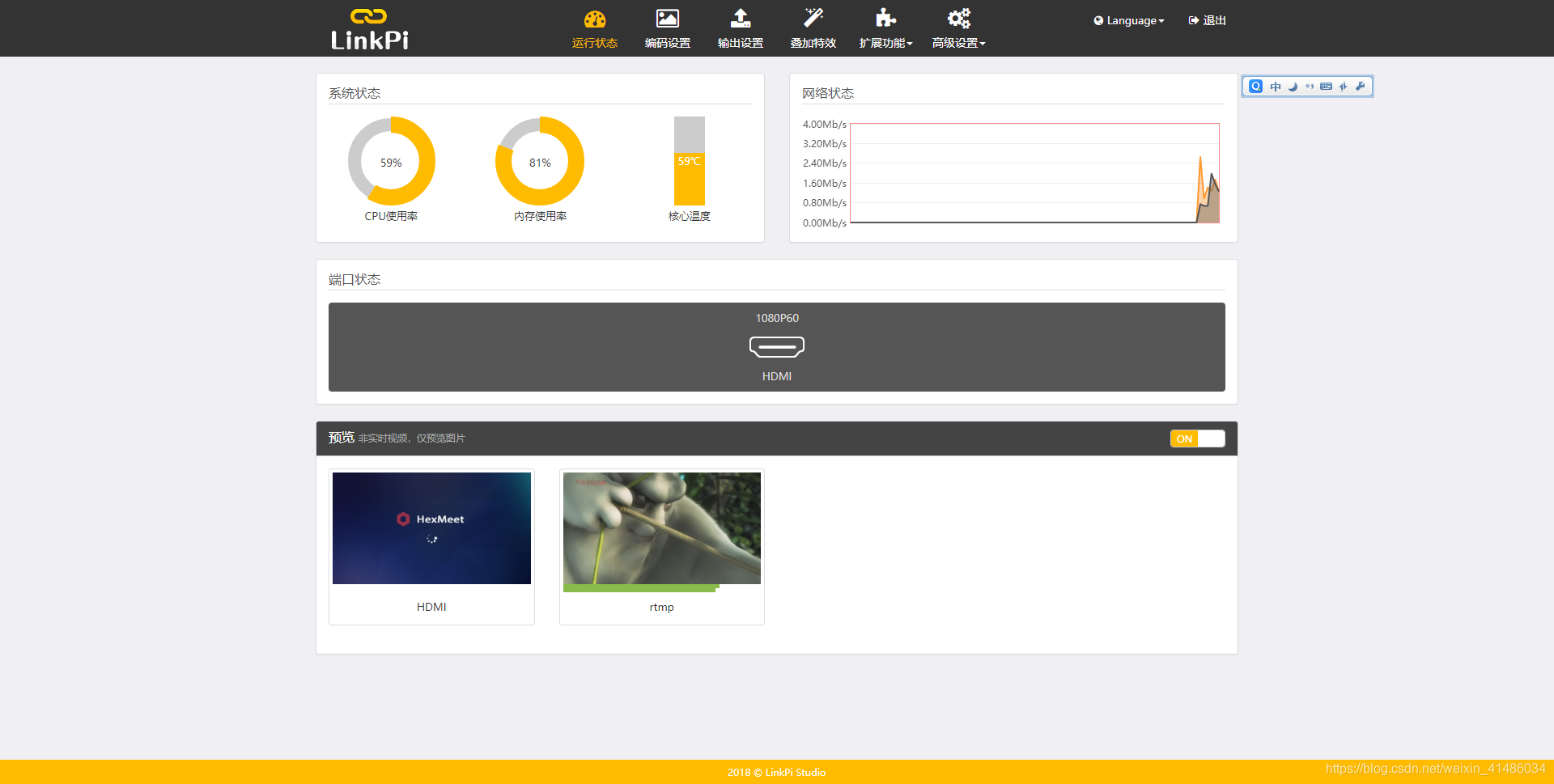
可以看到ENC1的能力还是很强的,这已经超出他的处理能力了,也还算稳定。下面我给个参数表供大家参考:
| 型号 | 处理能力 | 参考链接 |
|---|---|---|
ENC1 | 同时2路1080P@30编解码 | https://item.taobao.com/item.htm?spm=a2oq0.12575281.0.0.4ace1debB4NnVw&ft=t&id=618201308044 |
ENCSH | 同时6路1080P@30编解码(并支持4K) | https://item.taobao.com/item.htm?spm=a2oq0.12575281.0.0.4ace1debB4NnVw&ft=t&id=623692684721 |
ENC5 | 同时12路1080P@30编解码 (并支持4K) | https://item.taobao.com/item.htm?spm=a2oq0.12575281.0.0.4ace1debB4NnVw&ft=t&id=619022947575 |
注意:
1路1080P@60 = 2路1080P@30
1路4K@30 = 4路1080P@30
因此请大家根据自己的场景需要来选择合适的编码器。设备支持全协议转换(HDMI, SDI, HTTP, RTSP, RTMP, HLS, SRT, NDI, ONVIF) 。谢谢大家的支持!!!















 443
443











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









