







近年来,自动驾驶技术的快速发展引发了广泛关注,特别是特斯拉推出的FSD(全自动驾驶)系统V12版本,通过端到端AI技术的加持,重新定义了FSD的能力。然而,围绕自动驾驶的技术路线、商业模式、法规挑战等问题,整个行业依然处于高度分裂和争议之中。本文将围绕自动驾驶的技术进展,探讨端到端技术是否能为无人驾驶带来新春天,并详细分析无人驾驶行业的技术路线、当前困境和未来前景。
一、自动驾驶技术的分裂现状
自动驾驶技术已经有超过百年的发展历史,但真正的突破发生在2004年美国DARPA挑战赛之后,自动驾驶逐渐形成了感知、决策、控制的技术链路。至今,自动驾驶行业呈现出高度分裂的态势,主要表现在技术路线、感知技术和算法实现的差异上。
1.1 感知技术的路线之争:纯视觉 VS 多模态融合
目前,自动驾驶感知技术的主流方案可以分为两大派别:纯视觉派和多模态融合派。
-
纯视觉派:以特斯拉为代表,主要依赖摄像头和神经网络,通过将2D视频信息转换为3D地图来感知环境。其优点是成本较低,不需要昂贵的激光雷达等传感器设备。但由于纯视觉缺乏3D深度信息,这种方案容易受到外界光线变化或物体反射的干扰,曾导致特斯拉在一些事故中出现误判,如将白色卡车误识别为天空等。
-
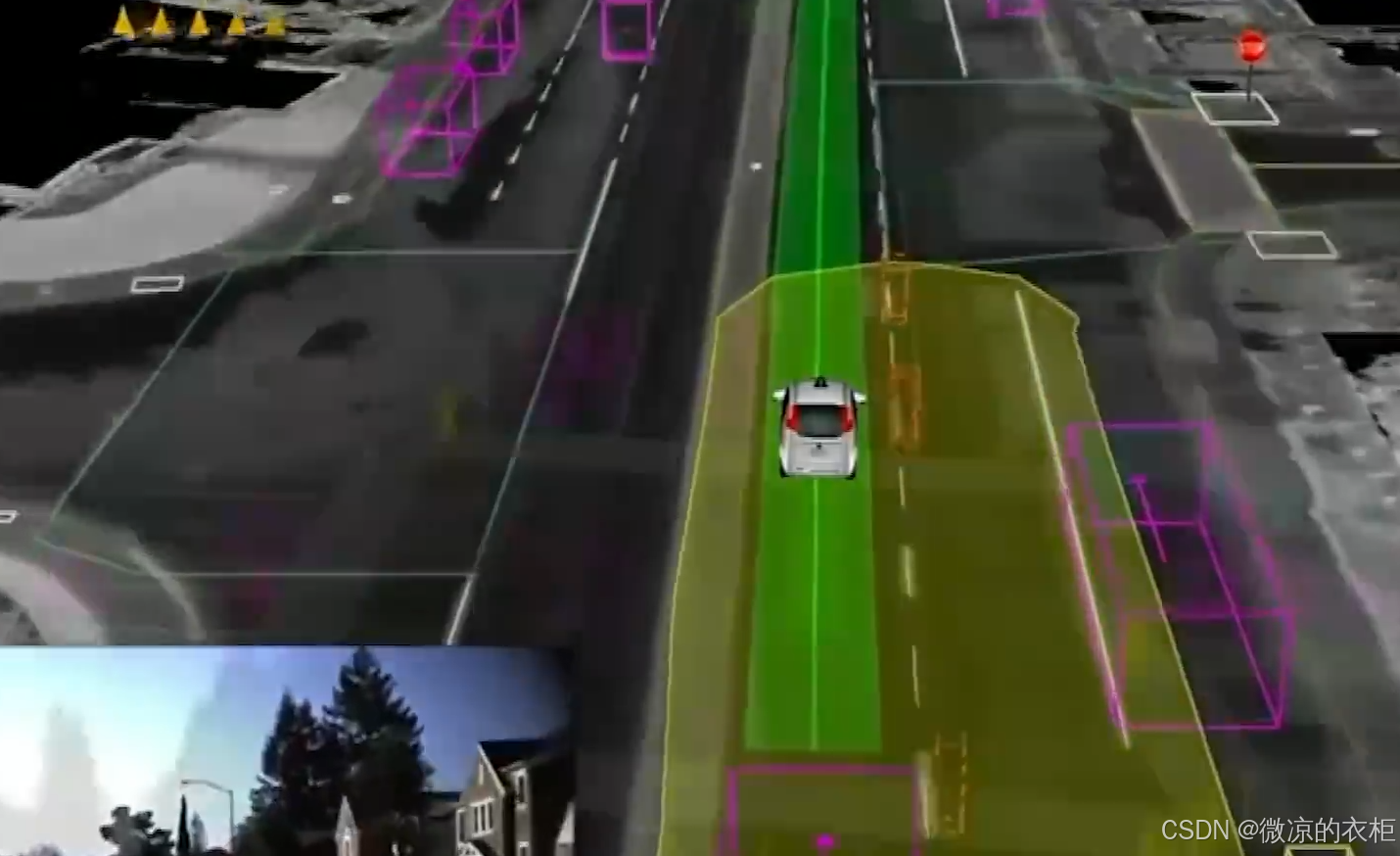
多模态融合派:包括Cruise、Waymo等公司采用多传感器融合技术,结合激光雷达、毫米波雷达、超声波传感器等设备,综合判断环境信息。多模态融合方案虽然精度更高,但成本较为昂贵,尤其是激光雷达的使用大幅增加了整车的硬件成本。
1.2 端到端技术的崛起
端到端技术近年来在自动驾驶领域逐渐崭露头角,特别是特斯拉推出的FSD V12版本,基于端到端AI的方案通过神经网络直接从传感器输入到控制输出,不再依赖传统的模块化架构。这种技术革新被称为“自动驾驶的ChatGPT时刻”。
1.2.1 传统自动驾驶架构的局限
传统自动驾驶系统分为感知、决策、控制三大模块,每个模块都有独立的规则库来应对不同的驾驶场景。然而,模块化架构的主要问题在于各个模块之间的信息传输损失,无法确保系统整体的最优性,同时大量规则库的手动维护成本高昂,难以应对长尾场景(corner cases)。
1.2.2 端到端架构的优势
端到端技术的核心在于去掉模块化架构,传感器数据不经过任何中间处理,直接输入到神经网络模型,并输出控制指令。这样可以避免模块间的信息丢失,且不需要人为编写复杂的规则库。特斯拉FSD V12据称代码量从30万行减少到2000行,大幅降低了系统复杂度,并提高了维护和升级的效率。
端到端的优势包括:
- 简化系统架构:减少感知、决策、规划等模块,降低系统复杂性。
- 降低维护成本:减少规则库的编写和维护,更多依赖数据驱动的训练。
- 提高扩展性:更容易应对不同的场景变化,特别是大规模推广下的复杂场景。
二、技术路线的难题:端到端真的成熟了吗?
虽然端到端技术具有显著的优势,但其在无人驾驶领域的全面应用仍然存在诸多问题。许多业内人士认为,端到端技术目前距离L4级别的无人驾驶还有很大差距。
2.1 不确定性与不可解释性
端到端技术最大的挑战在于其不确定性和不可解释性。端到端模型往往被视为“黑盒子”,模型的训练结果难以预测,一旦出现问题,工程师很难定位故障原因。此外,端到端模型还面临“灾难性遗忘”(catastrophic forgetting)问题,即新训练的数据可能会覆盖旧知识,导致系统表现不稳定。
例如,特斯拉的FSD V12在推出前经过了多轮推迟,据马斯克解释,部分训练数据中的人为接管案例反而导致模型的表现出现倒退。
2.2 数据需求与长尾问题
端到端技术对训练数据的依赖非常大,特别是对于长尾场景,端到端需要大量不同场景的数据支持。然而,目前的仿真系统仍然无法完全模拟现实中的复杂场景,因此解决长尾问题仍然是自动驾驶系统的一大难题。
同时,端到端模型需要大量高质量的数据进行训练,特斯拉为了训练FSD系统,已经收集了超过1000万段驾驶视频,并且需要经过复杂的筛选和标注,确保数据的准确性。这对于其他自动驾驶公司来说,是一笔巨大的成本开销。
2.3 安全性与法规挑战
无人驾驶L4的核心是安全性和冗余设计,系统必须具备在任何模块失效时仍能保障安全的能力。然而,端到端技术本身并不具备明确的安全冗余机制,特斯拉的现有FSD车型仍然存在盲区,无法达到完全无人驾驶的要求。尤其是在法规层面,L4系统需要满足不同国家和地区的法律规范,这对端到端技术的可扩展性提出了更高的挑战。
三、自动驾驶的未来:端到端能否成为主流?
尽管端到端技术带来了巨大的变革,但自动驾驶的未来并不仅仅依赖于一种技术路线。根据目前的行业现状,端到端技术与传统的模块化方案各有优劣,未来很可能会在实际应用中结合多种技术共同推进。
3.1 纯视觉与多模态融合的共存
随着激光雷达等传感器成本的下降,未来自动驾驶系统很可能会继续融合多种传感器技术,平衡成本与安全性。特斯拉虽然目前主推纯视觉方案,但未来可能会在Robotaxi中加入激光雷达,以弥补安全上的不足。
3.2 L2与L4的竞争与融合
L2(部分自动驾驶)与L4(高度自动驾驶)的竞争并不会迅速结束。L2系统通过提高软件和硬件的能力,或许能够逐步向L4进化,但要达到完全无人驾驶仍需解决许多技术问题。与此同时,L4公司如Cruise、Waymo等已经形成了技术壁垒,未来可能会通过降维打击抢占更多市场。
3.3 商业化与落地的挑战
自动驾驶的商业化路径依然充满挑战,尤其是在Robotaxi等无人驾驶出租车的应用场景下,如何平衡成本、技术和法规是每家企业需要解决的问题。高精地图、感知传感器、运营成本等问题都将在商业化过程中逐步暴露。
四、结论:自动驾驶的春天是否真的到来?
从端到端技术的兴起到无人驾驶的L4级别落地,自动驾驶行业正在经历一场前所未有的变革。虽然目前端到端技术还不成熟,长尾问题、安全性和数据依赖等难题尚未完全解决,但它无疑为自动驾驶行业注入了新的希望。未来,随着算法、硬件和法规的不断进步,自动驾驶行业有望迎来真正的“春天”,但这场革命的完成可能比我们预期的要更为漫长。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









