




 本文探讨了如何通过外部资源如接触、重力和动态运动增强机器人操作能力,包括抓取策略、物体重定向和移动,以及利用环境约束和动态操作的实例,展示了外部灵巧在扩展机器人功能上的潜力。
本文探讨了如何通过外部资源如接触、重力和动态运动增强机器人操作能力,包括抓取策略、物体重定向和移动,以及利用环境约束和动态操作的实例,展示了外部灵巧在扩展机器人功能上的潜力。
前言
外部灵巧自从提出,就收到诸多关注,这种利用外部资源(接触,重力,动态运动)的操作方式极大地促进了机器人的操作能力,本文将展开阐述这些外部资源是如何辅助机器人进行抓取和操作的。
一、外部资源定义与优点
外部灵巧(extrinsic dexterity)[1]:使用外部资源(手外资源)来操纵手中的物体。
外部资源(intrinsic dexterity)[1]:外部接触,重力,和动态运动。
外部灵巧的优点:
1. 能够完成一些难抓取物体的抓取,如抓取薄物体;
2. 能够更高效得完成一些操作任务,如使用重力在空中重定向,使用动态操作快速铺平衣服;
3. 简化了手部的复杂度,外部资源相当于提供了更多的约束来限制物体;
二、外部接触的利用
外部灵巧刚提出时,外部接触主要是指与桌面的接触,实际上环境中的所有约束(包括桌面,墙面,其他独立的物体)都可以用来提供外部接触。
这些外部接触不仅可以辅助物体的抓取,也可以用来辅助物体的重定向,移动等操作。
环境约束辅助机器人的抓取,已在其他博文(如何利用环境约束辅助机器人抓取?)中介绍过,这里只做简单的案例展示。
如图1所示的图A和B展示了外部接触辅助机器人抓取刚性和柔性物体的抓取。这些不同的抓取策略具有不同的工作空间和特性,具体应用时根据实际工况和需求选择对应的策略。
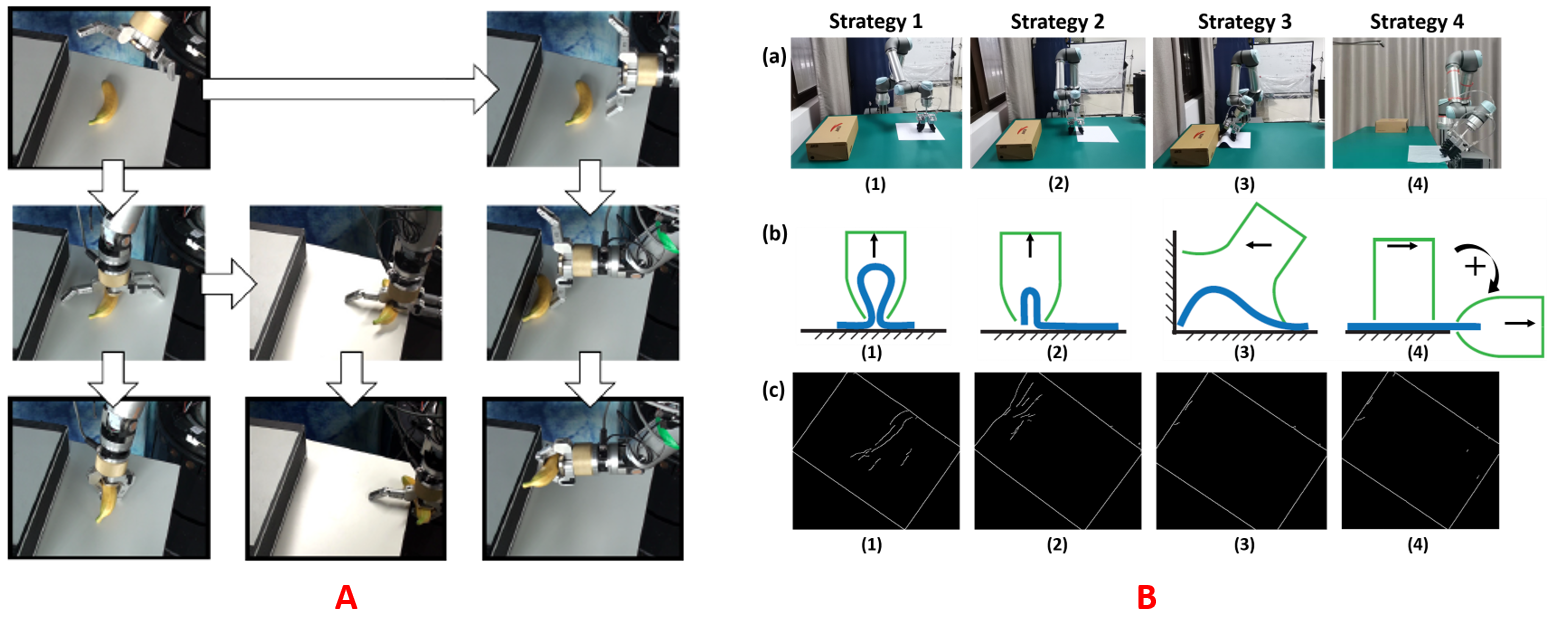
图1 外部接触辅助机器人抓取。
A: 分别利用桌面接触,桌面边缘,和墙面辅助机器人抓取香蕉 [2];
B: 分别利用桌面 (Strategy 1&2),盒子接触 (Strategy 3),桌面边缘 (Strategy 4)辅助机器人抓取柔性纸张 [3];
外部接触除了用于抓取之外,也可以重定向和移动物体。
如图2A所示,当物体与桌面接触之后,夹爪可以在物体表面滑动,以改变抓取位置,进而调整物体的姿态。
图2B所示为利用旋转(pivoting)的方式将物体的一端提起,另外一端始终接触桌面,提到目标姿态之后,即可拾起。
图2C为利用地面的接触旋转移动物体,特备对于大质量的物体。
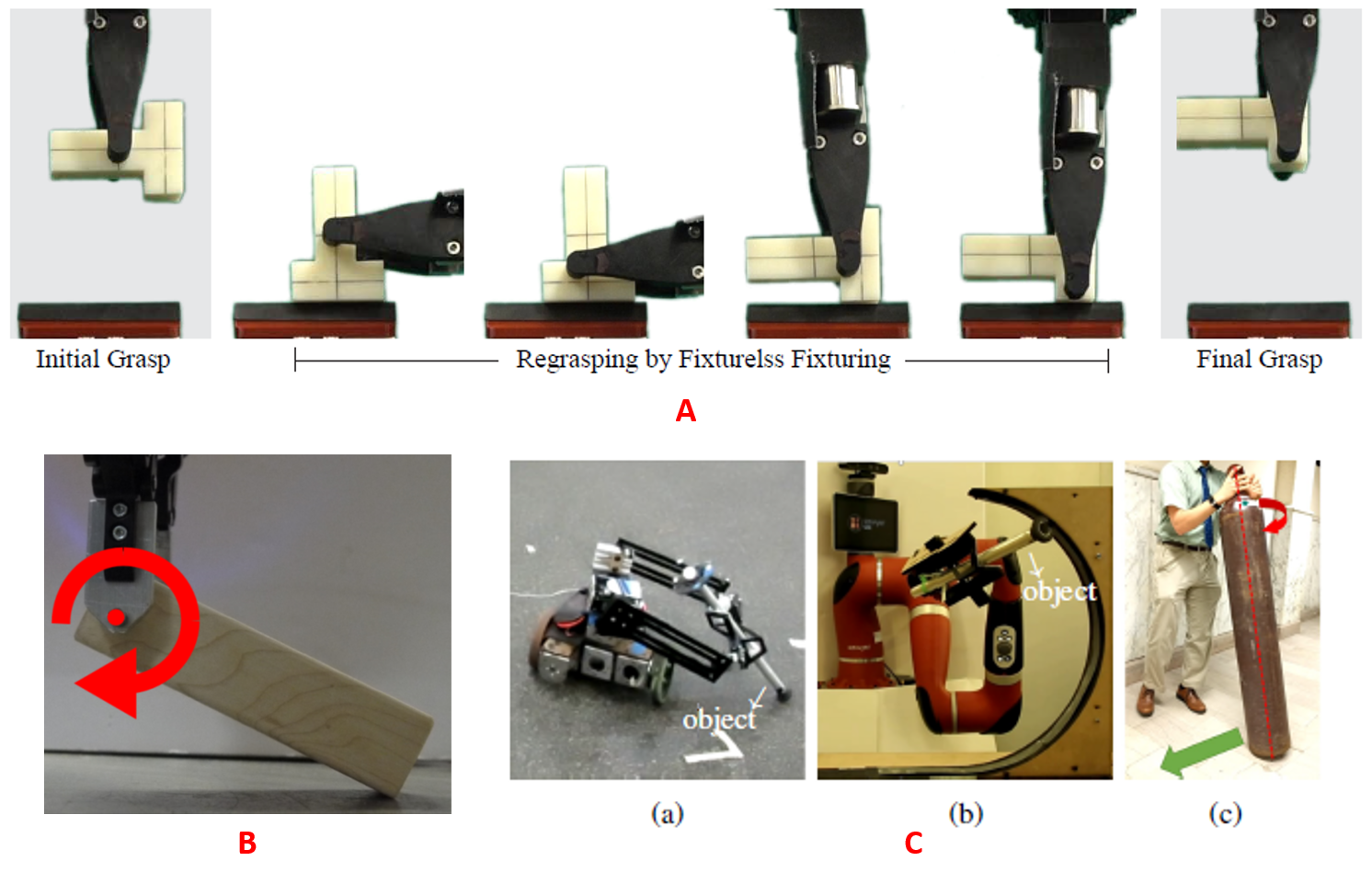
图2 外部接触用于重定向和移动物体。
A: 外部接触用来重定向(orienting)夹爪中的物体 [4];
B: 外部接触同来旋转(pivoting)夹爪中的物体 [5];
C: 外部接触用来搬运物体(edge-rolling) [6];
三、重力的利用
重力一直是环境中隐式的可以利用的资源,在操作中,重力可以用来调整物体的姿态。
相较于利用外部接触重定向物体,利用重力可以直接在空中对物体的位姿进行调整(如图3A所示)。
这种方法,主要利用重力相对于抓取轴形成的转矩带动物体旋转,从而调整物体的姿态。
除了只使用重力之外,其也可以和外部接触结合使用。如图3B所示,在鞋子打包任务中,将鞋子以一定的偏心距放置于鞋盒边缘上,当打开夹爪之后,鞋子在重力引起的偏心力距的作用下改变其状态,从top状态变为目标side状态。
此处利用重力和外部接触,以达到快速放置鞋子的目的,事半功倍。
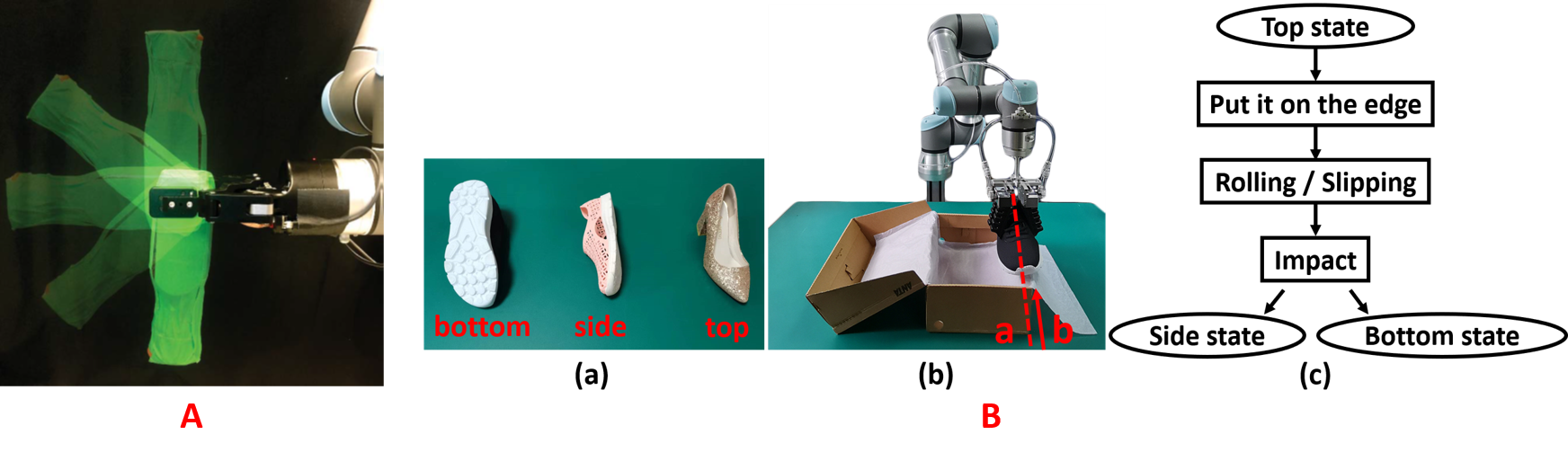
图3 利用重力重定向物体。
A: 利用重力重定向夹爪中物体 [7];
B: 利用重力和接触调整鞋子的状态 [3];
四、动态运动的利用
动态运动是人类在生活中经常使用的一种操作方式,如扔,投掷,甩等。
动态操作相较于静态操作有其独特的优势,能够快速高效地完成任务。
如图4A所示,利用物体的惯性和夹爪的加速度将物体抛到空中,然后用指尖抓取,快速改变了物体的抓取位姿。
动态操作也可以用于柔性物体的操作,其可以用来快速地展开衣物,如图4B所示,利用机器人末端的高速的沿特定路径的移动来展开衣物,非常高效。
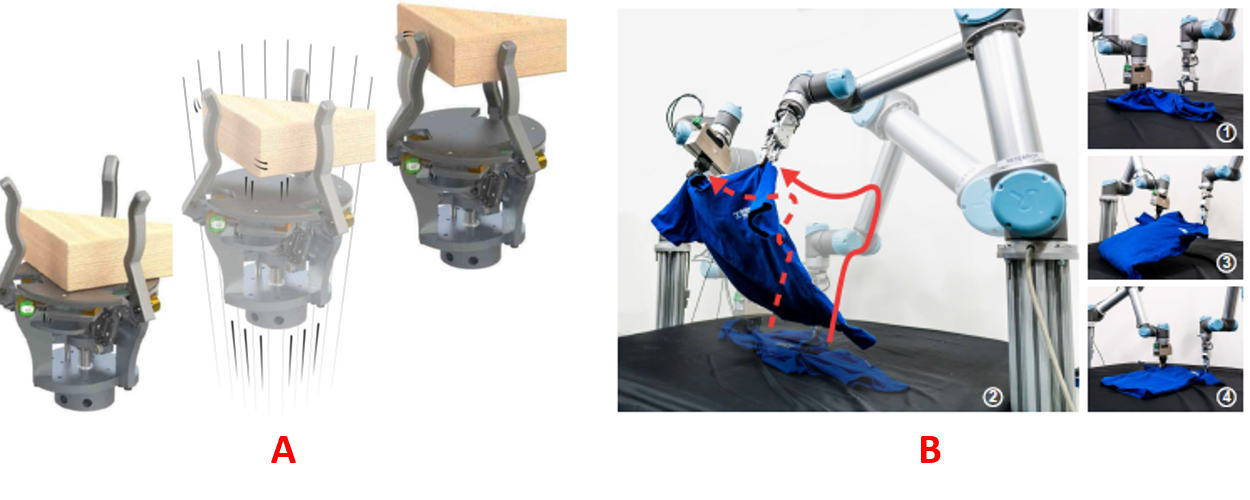
图4 动态运动操作刚性和柔性物体。
A: 利用物体的惯性改变其抓取位置 [1];
B: 用动态fling展开衣服 [8]。
总结
本文讲述了外部灵巧和外部资源的定义,并阐述了其在机器人操作中的应用,这种操作方式进一步扩展了机器人的操作能力,为机器人早日进入人类社会又迈出了一小步。
Reference
[1] Dafle N C, Rodriguez A, Paolini R, et al. Extrinsic dexterity: In-hand manipulation with external forces[C]//2014 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2014: 1578-1585.
[2] Eppner C, Brock O. Planning grasp strategies that exploit environmental constraints[C]//2015 IEEE international conference on robotics and automation (ICRA). IEEE, 2015: 4947-4952.
[3] Dong Y, Duan J, Liu Y, et al. Robotic Shoe Packaging Strategies Based on a Single Soft-Gripper System and Extrinsic Resources[C]//2023 International Conference on Advanced Robotics and Mechatronics (ICARM). IEEE, 2023: 469-475.
[4] Chavan-Dafie N, Rodriguez A. Regrasping by fixtureless fixturing[C]//2018 IEEE 14th international conference on automation science and engineering (CASE). IEEE, 2018: 122-129.
[5] Holladay A, Paolini R, Mason M T. A general framework for open-loop pivoting[C]//2015 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2015: 3675-3681.
[6] Specian A, Mucchiani C, Yim M, et al. Robotic edge-rolling manipulation: A grasp planning approach[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 3137-3144.
[7] Stepputtis S, Yang Y, Amor H B. Extrinsic dexterity through active slip control using deep predictive models[C]//2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2018: 3180-3185.
[8] Ha H, Song S. Flingbot: The unreasonable effectiveness of dynamic manipulation for cloth unfolding[C]//Conference on Robot Learning. PMLR, 2022: 24-33.


















 942
942

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











