










文章目录
问题描述
这里描述一个最短路问题。
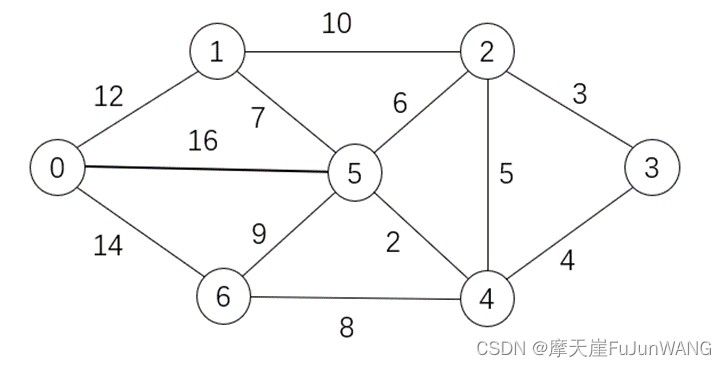
假设智能体A需要0到3,并且我们知道智能体A在路径上的运行时间与路径长度呈正比。求一个使得A最快到达3的路径。
其实我们可以把它看作一个最短路问题,并通过Dijkstra进行求解,但是我们偏不,我们能用MILP建模方法。并且把到达各个节点的时间编入模型,直接求解。
参数说明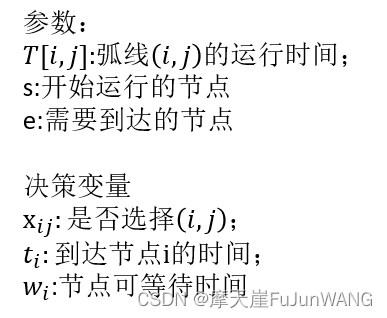
模型对比
错误模型
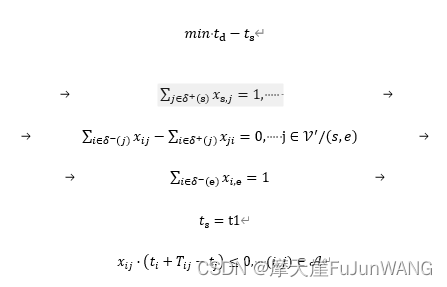
约束的前三行保持了中间节点处的流量平衡。第四行设置了出发的时间为t1。最后一行限制了从弧线的一个端点到另一个端点的时间限制。
重点看目标!
目标貌似没有任何问题,记录了从终点到起点之间的差值。很简单,又好理解。
正确模型
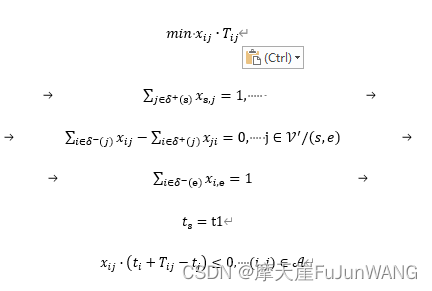
同错误模型:约束的前三行保持了中间节点处的流量平衡。第四行设置了出发的时间为t1。最后一行限制了从弧线的一个端点到另一个端点的时间限制。
重点看目标!
目标是所选路程的时间相加。
运算时间分析
利用GUROBI求解以上的两个模型,在一个300节点的网络上,错误模型的运行时间比正确模型多了几百倍!
具体原因以后再分析把。
后记
约束与模型之间要有尽可能多的变量的交互,这样在求解过程中目标对于变量选择的速度才会更快,即更快的丢弃无效约束和变量。














 357
357











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









