









从 Application 连接到 CameraService,这涉及到 Android 架构中的三个层次:APP 层,frameworks 层,Runtime 层。 其中,APP 层直接调用 frameworks 层所封装的方法,而 frameworks 层需要通过 Binder 远程调用 Runtime 中 CameraService 的函数。
下面以 android P 开始跟踪代码。
从APP到CameraService
这部分主要的调用逻辑如下图所示(图片来源 StoneDemo CSDN博客)。

APP
在应用中使用camera,将需要创建 CameraManager 对象实例,而后通过 CameraManager::openCamera() 打开camera设备。
openCamera(String cameraId, final CameraDevice.StateCallback callback, Handler handler)
其中:
- cameraId 是需要打开的camera设备
- callback 是camera设备状态的回调
- handler 是回调函数需要使用的 Handler
frameworks
CameraManager
文件路径:android/frameworks/base/core/java/android/hardware/camera2/CameraManager.java
通过 CameraManager::openCamera() 方法可以知道,最终也将是调用 openCameraDeviceUserAsync(cameraId, callback, executor, clientUid) 方法,其中 clientUid 为 USE_CALLING_UID。
private CameraDevice openCameraDeviceUserAsync(String cameraId,
CameraDevice.StateCallback callback, Executor executor, final int uid)
throws CameraAccessException {
CameraCharacteristics characteristics = getCameraCharacteristics(cameraId);
CameraDevice device = null;
synchronized (mLock) {
ICameraDeviceUser cameraUser = null;
/* 实例化CameraDeviceImpl,该对象的构造函数将保存参数信息 */
android.hardware.camera2.impl.CameraDeviceImpl deviceImpl =
new android.hardware.camera2.impl.CameraDeviceImpl(
cameraId,
callback,
executor,
characteristics,
mContext.getApplicationInfo().targetSdkVersion);
/* CameraDeviceImpl 对象包含的 CameraDeviceCallbacks 实例,
* 每个 CameraDeviceImpl 都将创建一个 CameraDeviceCallbacks,
* 这是提供给远端连接到 CameraDeviceImpl 的接口
*/
ICameraDeviceCallbacks callbacks = deviceImpl.getCallbacks();
try {
/* 根据 API1/API2 进行不同的区分,以API2进行跟踪 */
if (supportsCamera2ApiLocked(cameraId)) {
// Use cameraservice's cameradeviceclient implementation for HAL3.2+ devices
/* 通过同一文件的 CameraManagerGlobal 类方法获得CameraService代理。
* 实际上是通过ServiceManager获得"media.camera" 的
* CameraService Binder代理,然后转变为ICameraService
*/
ICameraService cameraService = CameraManagerGlobal.get().getCameraService();
if (cameraService == null) {
throw new ServiceSpecificException(
ICameraService.ERROR_DISCONNECTED,
"Camera service is currently unavailable");
}
/* 通过 ICameraService::connectDevice() 连接设备,
* 返回的 cameraUser 实际上指向的是远端 CameraDeviceClient
* 的本地接口
*/
cameraUser = cameraService.connectDevice(callbacks, cameraId,
mContext.getOpPackageName(), uid);
} else {
// Use legacy camera implementation for HAL1 devices
...
}
} catch (ServiceSpecificException e) {
...
}
// TODO: factor out callback to be non-nested, then move setter to constructor
// For now, calling setRemoteDevice will fire initial
// onOpened/onUnconfigured callbacks.
// This function call may post onDisconnected and throw CAMERA_DISCONNECTED if
// cameraUser dies during setup.
/* 将 CameraDeviceClient 设置到 CameraDeviceImpl 中进行管理 */
deviceImpl.setRemoteDevice(cameraUser);
device = deviceImpl;
}
return device;
}
CameraDeviceImpl
文件路径:android/frameworks/base/core/java/android/hardware/camera2/impl/CameraDeviceImpl.java
/**
* Set remote device, which triggers initial onOpened/onUnconfigured callbacks
*
* <p>This function may post onDisconnected and throw CAMERA_DISCONNECTED if remoteDevice dies
* during setup.</p>
*
*/
public void setRemoteDevice(ICameraDeviceUser remoteDevice) throws CameraAccessException {
synchronized(mInterfaceLock) {
// TODO: Move from decorator to direct binder-mediated exceptions
// If setRemoteFailure already called, do nothing
if (mInError) return;
/* 将远端设备增加一层封装 */
mRemoteDevice = new ICameraDeviceUserWrapper(remoteDevice);
IBinder remoteDeviceBinder = remoteDevice.asBinder();
...
/* 将会触发 onOpened 和 onUnconfigured 这两个回调,
* 这两个回调是在创建 CameraDeviceImpl 实例对象时传递
* 进来的callback,而该callback只是APP在调用 openCamera()
* 时传递进来的,应用一般实现为开启预览等操作
*/
mDeviceExecutor.execute(mCallOnOpened);
mDeviceExecutor.execute(mCallOnUnconfigured);
}
}
CameraService
文件路径:android/frameworks/av/services/camera/libcameraservice/CameraService.cpp
在调用 cameraService.connectDevice(callbacks, cameraId, mContext.getOpPackageName(), uid) 时,最终将会调用到 CameraService.cpp 中的 connectDevice() 函数。而在 connectDevice() 函数中,connectHelper() 才是真正的逻辑实现,此时设定的模板类型是 <hardware::camera2::ICameraDeviceCallbacks,CameraDeviceClient>。
Status CameraService::connectDevice(
const sp<hardware::camera2::ICameraDeviceCallbacks>& cameraCb,
const String16& cameraId,
const String16& clientPackageName,
int clientUid,
/*out*/
sp<hardware::camera2::ICameraDeviceUser>* device) {
ATRACE_CALL();
Status ret = Status::ok();
String8 id = String8(cameraId);
sp<CameraDeviceClient> client = nullptr;
ret = connectHelper<hardware::camera2::ICameraDeviceCallbacks,CameraDeviceClient>(cameraCb, id,
/*api1CameraId*/-1,
CAMERA_HAL_API_VERSION_UNSPECIFIED, clientPackageName,
clientUid, USE_CALLING_PID, API_2,
/*legacyMode*/ false, /*shimUpdateOnly*/ false,
/*out*/client);
...
*device = client;
return ret;
}
template<class CALLBACK, class CLIENT>
Status CameraService::connectHelper(const sp<CALLBACK>& cameraCb, const String8& cameraId,
int api1CameraId, int halVersion, const String16& clientPackageName, int clientUid,
int clientPid, apiLevel effectiveApiLevel, bool legacyMode, bool shimUpdateOnly,
/*out*/sp<CLIENT>& device) {
binder::Status ret = binder::Status::ok();
String8 clientName8(clientPackageName);
...
sp<CLIENT> client = nullptr;
{
...
sp<BasicClient> tmp = nullptr;
/* makeClient() 将会根据API版本以及HAL版本选择生成具体的 Client 实例 */
if(!(ret = makeClient(this, cameraCb, clientPackageName,
cameraId, api1CameraId, facing,
clientPid, clientUid, getpid(), legacyMode,
halVersion, deviceVersion, effectiveApiLevel,
/*out*/&tmp)).isOk()) {
return ret;
}
client = static_cast<CLIENT*>(tmp.get());
...
/* client 进行初始化工作
* 注意这里的参数,mCameraProviderManager 是 CameraService 运行起来时,
* 第一次强指针引用从而调用 onFirstRef() 函数创建的 CameraProviderManager
* 实例对象,它保存了 CameraProvider 信息,待会再详细分析
*/
err = client->initialize(mCameraProviderManager, mMonitorTags);
...
} // lock is destroyed, allow further connect calls
// Important: release the mutex here so the client can call back into the service from its
// destructor (can be at the end of the call)
device = client;
return ret;
}
Status CameraService::makeClient(const sp<CameraService>& cameraService,
const sp<IInterface>& cameraCb, const String16& packageName, const String8& cameraId,
int api1CameraId, int facing, int clientPid, uid_t clientUid, int servicePid,
bool legacyMode, int halVersion, int deviceVersion, apiLevel effectiveApiLevel,
/*out*/sp<BasicClient>* client) {
if (halVersion < 0 || halVersion == deviceVersion) {
// Default path: HAL version is unspecified by caller, create CameraClient
// based on device version reported by the HAL.
switch(deviceVersion) {
/* CAMERA_DEVICE_API_VERSION_1_0 只能使用 API1 */
case CAMERA_DEVICE_API_VERSION_1_0:
...
break;
case CAMERA_DEVICE_API_VERSION_3_0:
case CAMERA_DEVICE_API_VERSION_3_1:
case CAMERA_DEVICE_API_VERSION_3_2:
case CAMERA_DEVICE_API_VERSION_3_3:
case CAMERA_DEVICE_API_VERSION_3_4:
if (effectiveApiLevel == API_1) { // Camera1 API route
sp<ICameraClient> tmp = static_cast<ICameraClient*>(cameraCb.get());
*client = new Camera2Client(cameraService, tmp, packageName,
cameraId, api1CameraId,
facing, clientPid, clientUid,
servicePid, legacyMode);
} else { // Camera2 API route
sp<hardware::camera2::ICameraDeviceCallbacks> tmp =
static_cast<hardware::camera2::ICameraDeviceCallbacks*>(cameraCb.get());
/* API2 HAL3 将会通过 CameraDeviceClient() 创建 client,
* 这一 client 最终返回到 CameraDeviceImpl 实例,被保存在 mRemoteDevice
*/
*client = new CameraDeviceClient(cameraService, tmp, packageName, cameraId,
facing, clientPid, clientUid, servicePid);
}
break;
default:
// Should not be reachable
...
}
} else {
// A particular HAL version is requested by caller. Create CameraClient
// based on the requested HAL version.
...
}
return Status::ok();
}
至此,打开相机流程中,从 App 到 CameraService 的调用逻辑基本上就算走完了。
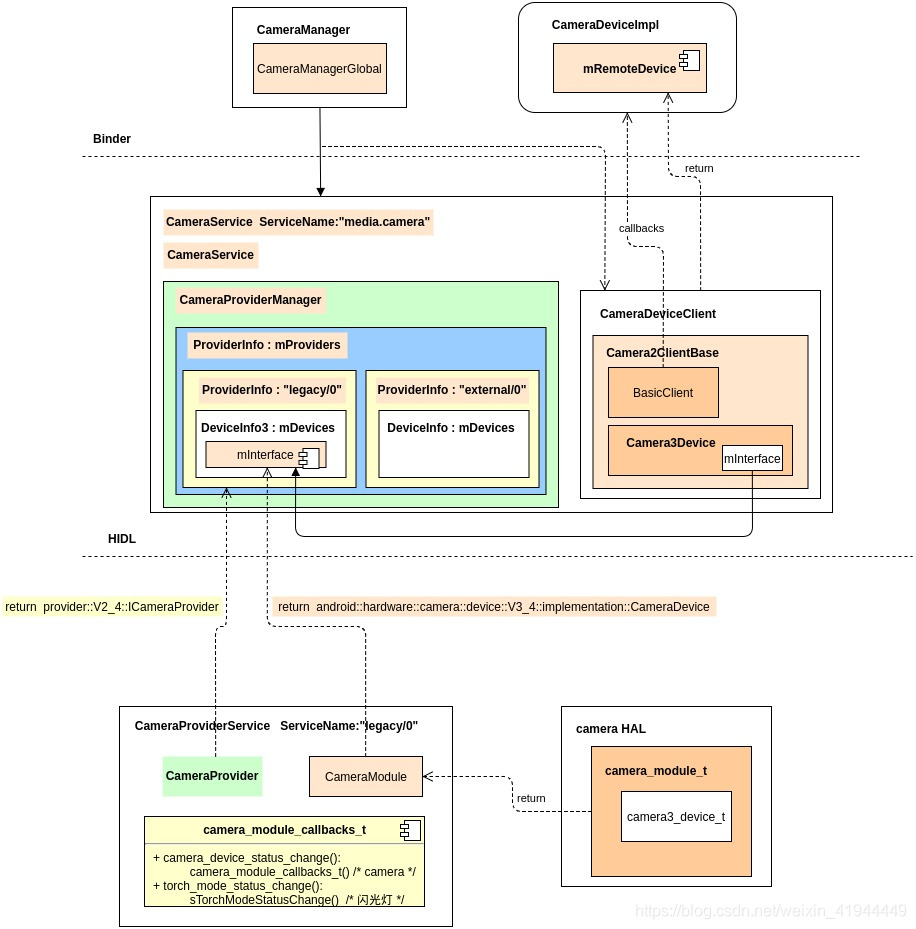
简图总结
根据上面的流程追踪,我们可以描绘一个比较简单直观的连路框架图,如下(图片来源 StoneDemo CSDN博客)。
其中黑色虚线表示下行(控制)路线,红色虚线表明上行(状态、数据)路线。

从CameraService到CameraProvider
由于 Android O 中加入了 Treble 机制,它带来的一个巨大变化就是将原本的 CameraServer 进程分隔成 CameraServer 与 Provider service 两个进程,它们之间通过 HIDL(一个类似 Binder 的机制)进行通信。
在这种情况下,CameraServer 一端主体为 CameraService,它将会寻找现存的 Provider service,将其加入到内部的 CameraProviderManager 中进行管理,相关操作都是通过远端调用进行的。
而 Provider service 一端的主体为 CameraProvider,它在初始化时就已经连接到 libhardware 的 Camera HAL 实现层,并以 CameraModule 来进行管理。这两个进程的启动以及初始化在系统启动时就已经进行,所以当相机应用运行时,它们的初始化工作已经完成。
CS
CameraDeviceClient
文件路径:android/frameworks/av/services/camera/libcameraservice/api2/CameraDeviceClient.cpp
Camera2ClientBase 的设置模板为 CameraService::BasicClient 。
// Interface used by CameraService
CameraDeviceClient::CameraDeviceClient(const sp<CameraService>& cameraService,
const sp<hardware::camera2::ICameraDeviceCallbacks>& remoteCallback,
const String16& clientPackageName,
const String8& cameraId,
int cameraFacing,
int clientPid,
uid_t clientUid,
int servicePid) :
/* 通过构造函数初始化 Camera2ClientBase,在它的
* 构造函数中,将会创建一个 Camera3Device 实例对象
*/
Camera2ClientBase(cameraService, remoteCallback, clientPackageName,
cameraId, /*API1 camera ID*/ -1,
cameraFacing, clientPid, clientUid, servicePid),
mInputStream(),
mStreamingRequestId(REQUEST_ID_NONE),
mRequestIdCounter(0) {
ATRACE_CALL();
ALOGI("CameraDeviceClient %s: Opened", cameraId.string());
}
client->initialize()
回到 CameraService::connectHelper() 函数,在调用 makeClient() 函数之后,将得到相应的client,接着,在 CameraService::connectHelper() 函数进行 client->initialize(mCameraProviderManager, mMonitorTags),mCameraProviderManager 为 CameraService 保存 CameraProvider 信息的成员变量。
// Camera2ClientBase 的设置模板为 CameraService::BasicClient
template<typename TProviderPtr>
status_t CameraDeviceClient::initializeImpl(TProviderPtr providerPtr, const String8& monitorTags) {
ATRACE_CALL();
status_t res;
res = Camera2ClientBase::initialize(providerPtr, monitorTags);
if (res != OK) {
return res;
}
String8 threadName;
/* 创建 FrameProcessorBase 实例对象,它将负责帧处理 */
mFrameProcessor = new FrameProcessorBase(mDevice);
threadName = String8::format("CDU-%s-FrameProc", mCameraIdStr.string());
/* 创建线程进行获取图像数据 */
mFrameProcessor->run(threadName.string());
/* 将 CameraDeviceClient 注册登记到 FrameProcessorBase
* 的 mRangeListeners,当帧处理完成时,将会通过它来回调通知APP */
mFrameProcessor->registerListener(FRAME_PROCESSOR_LISTENER_MIN_ID,
FRAME_PROCESSOR_LISTENER_MAX_ID,
/*listener*/this,
/*sendPartials*/true);
...
return OK;
}
template <typename TClientBase>
template <typename TProviderPtr>
status_t Camera2ClientBase<TClientBase>::initializeImpl(TProviderPtr providerPtr,
const String8& monitorTags) {
...
// Verify ops permissions
/* 将调用到 CameraService::BasicClient::startCameraOps() 函数 */
res = TClientBase::startCameraOps();
...
/* 将调用 Camera3Device::initialize() 函数 */
res = mDevice->initialize(providerPtr, monitorTags);
...
return OK;
}
TClientBase::startCameraOps()
|
|
|
\|/
status_t CameraService::BasicClient::startCameraOps() {
...
// Transition device state to OPEN
/* 这里,将会通过Binder代理,将设备状态更新到远端,这个时候,
* CameraProvider 管理的device 状态将更新,设备进入 OPEN 状态
*/
sCameraService->updateProxyDeviceState(ICameraServiceProxy::CAMERA_STATE_OPEN,
mCameraIdStr, mCameraFacing, mClientPackageName, apiLevel);
return OK;
}
res = mDevice->initialize(providerPtr, monitorTags)
|
|
|
\|/
status_t Camera3Device::initialize(sp<CameraProviderManager> manager, const String8& monitorTags) {
...
sp<ICameraDeviceSession> session;
ATRACE_BEGIN("CameraHal::openSession");
/* 从 CameraProviderManager 的 mProviders 查找对应 id 的 mDevices,
* 而后调用相对应的 deviceInfo3->mInterface->open(),其中,mInterface
* 是在CameraProvider adddevice 时,通过DeviceInfo3的构造函数传递进来的,
* mInterface 最终为
* android::hardware::camera::device::V3_4::implementation::CameraDevice
*/
status_t res = manager->openSession(mId.string(), this,
/*out*/ &session);
ATRACE_END();
...
/* 获取请求队列 */
std::shared_ptr<RequestMetadataQueue> queue;
auto requestQueueRet = session->getCaptureRequestMetadataQueue(
[&queue](const auto& descriptor) {
queue = std::make_shared<RequestMetadataQueue>(descriptor);
if (!queue->isValid() || queue->availableToWrite() <= 0) {
ALOGE("HAL returns empty request metadata fmq, not use it");
queue = nullptr;
// don't use the queue onwards.
}
});
...
/* 获取请求结果返回队列 */
std::unique_ptr<ResultMetadataQueue>& resQueue = mResultMetadataQueue;
auto resultQueueRet = session->getCaptureResultMetadataQueue(
[&resQueue](const auto& descriptor) {
resQueue = std::make_unique<ResultMetadataQueue>(descriptor);
if (!resQueue->isValid() || resQueue->availableToWrite() <= 0) {
ALOGE("HAL returns empty result metadata fmq, not use it");
resQueue = nullptr;
// Don't use the resQueue onwards.
}
});
....
/* 运行相应的队列线程 */
return initializeCommonLocked();
}
status_t Camera3Device::initializeCommonLocked() {
/** Start up status tracker thread */
mStatusTracker = new StatusTracker(this);
status_t res = mStatusTracker->run(String8::format("C3Dev-%s-Status", mId.string()).string());
/** Register in-flight map to the status tracker */
mInFlightStatusId = mStatusTracker->addComponent();
/** Start up request queue thread */
mRequestThread = new RequestThread(this, mStatusTracker, mInterface, sessionParamKeys);
res = mRequestThread->run(String8::format("C3Dev-%s-ReqQueue", mId.string()).string());
mPreparerThread = new PreparerThread();
...
}
CameraProviderService
CameraDevice
文件路径:android/hardware/interfaces/camera/device/3.4/default/CameraDevice.cpp
CameraDevice 实例对象在初始化 CameraProviderService 之后就存在了,前面说到通过 CameraProviderManager 中的 deviceInfo 接口,调用远端 CameraDevice 实例的 open() 函数。(3.4版本的open函数,将会调用到3.2版本的open函数)
Return<void> CameraDevice::open(const sp<ICameraDeviceCallback>& callback, open_cb _hidl_cb) {
Status status = initStatus();
sp<CameraDeviceSession> session = nullptr;
...
if (status != Status::OK) {
...
} else {
...
/** Open HAL device */
status_t res;
camera3_device_t *device;
ATRACE_BEGIN("camera3->open");
/* 调用HAL层的 open() 函数 */
res = mModule->open(mCameraId.c_str(),
reinterpret_cast<hw_device_t**>(&device));
...
struct camera_info info;
res = mModule->getCameraInfo(mCameraIdInt, &info);
...
/* 创建session实例对象 */
session = createSession(
device, info.static_camera_characteristics, callback);
...
mSession = session;
...
mLock.unlock();
}
_hidl_cb(status, session->getInterface());
return Void();
}
sp<CameraDeviceSession> CameraDevice::createSession(camera3_device_t* device,
const camera_metadata_t* deviceInfo,
const sp<ICameraDeviceCallback>& callback) {
return new CameraDeviceSession(device, deviceInfo, callback);
}
至此,Android open camera的流程操作到相应SOC厂商的camera HAL层,各个平台将会有一些差异,就不再详细的分析。
参考的结构图如下:
由于自身能力有限,对这一方面的理解还不够透彻,所以很多地方没有说清楚,后续理解了再详细更新,也欢迎各路大佬指点迷津,感谢!
参考文章
在了解学习android camera的过程中,参考了网上很多的优秀文章,感谢!
StoneDemo [Android O] HAL3 之 Open Camera2 流程(一)—— 从 App 到 CameraService
StoneDemo [Android O] HAL3 之 Open Camera2 流程(二)—— 从 CameraService 到 HAL Service
StoneDemo [Android O] HAL3 之 Open Camera2 流程(三,完结)—— 从 HAL Service 到 Camera HAL
















 97
97











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











