







 本文详细介绍STM32单片机的基础知识与开发流程,包括嵌入式系统介绍、C语言编程要点、STM32系统架构等内容,并通过实例演示如何使用MDK创建工程项目。
本文详细介绍STM32单片机的基础知识与开发流程,包括嵌入式系统介绍、C语言编程要点、STM32系统架构等内容,并通过实例演示如何使用MDK创建工程项目。
目录
4.system_stm32f10x.c&system_stm32f10x.h
STM32F10x_StdPeriph_Driver 文件夹
stm32f10x_it.c & stm32f10x_conf.h & system_stm32f10x.c 文件
14.3.1 端口配置寄存器(GPIOx_CRL 和 GPIOx_CRH)
19.5.1 内部时钟选择函数:TIM_InternalClockConfig
19.5.2 时基单元配置函数:TIM_TimeBaseInit
19.5.3 定时器状态标志位清除函数TIM_ClearFlag
19.5.5 定时器中断状态获取函数TIM_GetITStatus
19.5.7 清除中断待处理标志位函数TIM_ClearITPendingBit
0.前言
0.1 为什么要写这个教程
其实最重要的目的是为了总结自己学习和整理的资料,同时锻炼下自己的写作水平。毕业已经十多年了,平常也一直爱学习一些自己感兴趣的东西。自己对软件硬件都非常感兴趣,有些知识学过之后,一段时间就忘了,需要用的时候再看一遍,以前我经常自己用笔记本记下来,但发现有很多的弊端:(1)一些涉及代码的手写笔记并不是很友好,(2)手写记录的东西不直观且没有一个总的概览,(3)由于搬家以及时间太久等原因,一些笔记本都丢了,自己当时总结的一些知识点也没了。
CSDN上看文章博客也好多年了,感觉在这里写文档还是蛮好的,可以把自己学到的东西记录下来,方便自己日后需要的时候再翻看。因为这个资料一个主要目的是自己看的,所以写的东西肯定都是自己认真看过的,肯定有理解不深的地方,所以我会一直不断更新改正,也会根据自己理解的深入一步步完善。俗话说“好记性不如烂笔头”,把自己从其他地方学到的东西,再一个字一个字的敲出来,图再重新画一遍,代码再敲一次,对个人提升还是非常有帮助的。
当前行业太卷了,平常工作很忙,下班也很晚了,更新会非常不及时,只能抽空更新整理。
0.2 学习STM32需要具备的知识
(1)C语言:这个是最重要的,如果C语言不会,那建议先学习下C语言再来。我大学学习单片机的时候,编程都是用的汇编语言写的,但现在已经不推荐了,当前主流还是基于C语言来开发。以前大学的时候学完C语言感觉这玩意没啥用,还不如VB能编写一些桌面应用,看得见摸得着的。毕业后进了汽车行业,才知道C语言是多么重要,可以说整个嵌入式领域,C语言就是当之无愧的NO.1,没有之一。STM32的开发都是基于C语言,需要我们有较为扎实的C语言功底。
(2)数电、模电、电路原理: 能懂一些肯定是很有帮助的,以我自己的经历来说,也可以在学习的过程中再对涉及到的知识点进行了解学习。因为大学的时候我学过数电、模电电路原理等课程,还是有一定基础的,但学习过程中很多知识点也忘了,也是又重新补习了一些。
(3)是否要先学习51单片机:个人感觉非常有必要。我们的主要目的还是学习,往往越简单的一些设备的使用越接近最底层的知识。就像我们现在汽车软件的开发,由于工具链过于完备,你可以一年不用敲一个代码就把软件做出来。画画图,开发软件里咣咣一通配置也不需要你写什么代码,软件就做出来了。这样开发效率虽然高,但对个人掌握知识来说并不算一个好事,很多人的认知也就停留在表面,一些东西就不懂所以然。
我们51单片机的开发主要还是通过配置寄存器的方式,STM32再通过这种模式就有点太过复杂了,但本质的原理是一样的。STM32的开发就直接从库函数开始。
(4)学习资料推荐: 野火,正点原子,哔站江协科技的STM32教程都可以。
(5) 学习建议:多练习多动手。
第1章.STM32单片机入门知识介绍
1.1 嵌入式系统简介
1.1.1 什么是嵌入式系统
嵌入式系统的标准定义如下:
嵌入式系统是以应用为中心、以计算机技术为基础、软硬件可裁剪、对功能、可靠性、成本、体积和功耗有严格要求的专用计算机系统。
如上定义,嵌入型系统属于专用的计算机系统,其对应的就是通用计算机系统,也就是我们的个人电脑等,也就是我们的电脑等通用计算机系统具有“通用而复杂”的功能,而嵌入式系统只为实现一些特定的专用功能。

图1.1-1计算机系统组成
嵌入式系统和通用计算机系统都属于计算机系统。如图1.1-1。从系统组成上它们都是软件和硬件组成,工作原理也相同。从硬件上看,两者都是由CPU、存储器、I/O接口和中断系统等部件组成;从软件上看,两者都可以换分为系统软件和应用软件。
嵌入式系统和通用计算机系统也是有很多不同点,如下图1.1-2所示。

图1.1-2嵌入式系统与通用计算系统的不同点
1.1.2 嵌入式系统的特点
和通用计算机系统比较,嵌入式系统有一下特点:
(1)专用性强:嵌入式系统按照具体应用需求进行设计,完成指定的任务,通常没有通用性,只能完成特定的应用。比如冰箱的控制系统只能完成冰箱的控制,而不能在空调的控制中使用。
(2)可裁剪性:基于体积、成本等因素,嵌入式系统的软硬件可根据需求进行裁剪,在满足要求的前提下做到最精简的配置。
(3)实时性好:大多数实时性系统都是嵌入式系统,嵌入式系统也基本都具有实时性的要求和性能。
(4)可靠性高:很多嵌入式系统必须全天候持续工作,甚至在极端环境下正常运行,大多数嵌入式系统都具有可靠性机制。
(5) 生命周期长:通用计算机的更新迭代较快,嵌入式系统的生命周期与其嵌入的产品同步,生命周期较长。
1.1.3 嵌入式系统的应用领域
如图1.1-3所示,嵌入式系统的应用非常广泛,在工业控制,交通管理,信息家电,环境工程等广泛应用。

图1.1-3 嵌入式系统的应用领域
1.2 单片机基本概念
单片机,全称单片微型计算机(Single-Chip Microcomputer),是指集成在一个芯片上的微型计算机。这种计算机系统的体积较小,内部包含中央处理器CPU、随机存储器RAM、只读存储器ROM、定时/计数器和多种I/O接口电路,并在一块集成电路芯片上集成了微型计算机的各种功能部件,具有高性能、低价格的优点。国内经常使用“单片机”这个称呼,国外通常称为“微控制器”,英文缩写MCU(Microcontroller Unit)。
单片机是嵌入式系统中的一个重要子类,单片机在嵌入式系统中扮演了关键的角色,是实现嵌入式系统功能的重要组件之一。
1.3 ARM简介
1.3.1 ARM公司简介
ARM,全称为Advanced RISC Machines,既指ARM公司,也指ARM处理器内核。ARM公司是全球领先的半导体知识产权(IP)提供商,是一家在微处理器设计领域具有重要影响力和广泛应用的公司,ARM的总部位于英国的剑桥。
ARM设计了大量高性能、廉价、低功耗的RISC(Reduced Instruction Set Computer,精简指令集计算机)处理器及芯片。ARM作为知识产权供应商,本身不直接从事芯片的生产,其将知识产权授权给世界各大半导体厂商后,各大生产商再根据不同的应用领域,加入适当的外围电路,形成自己的ARM微处理器芯片。ARM架构其高效、节能的特性,使得它非常适合在移动设备和嵌入式系统中使用,它的技术广泛应用于各种嵌入式系统设计,从无线通讯、网络和消费娱乐产品到成像、汽车、安全和存储解决方案等领域。ARM架构已经成为当今使用最广泛的32位嵌入式RISC指令集架构,ARM公司已经成为全球RISC标准的缔造者。目前全球超过95%的智能手机和平板电脑都采用了ARM架构。
1.3.2 ARM处理器简介
ARM公司开发了很多系列的处理器内核,以前都是以ARMx(x是数字)进行命名,比如经典的ARM7,ARM9,ARM11等。在早期,还在数字后面加字母后缀,用来进一步明确该处理器支持的特性。比如,ARM7TDMI,T代表Thumb指令集,D代表支持JTAG调试(Debugging),M代表快速乘法器,I代表一个嵌入式ICE模块。
到了ARMv7架构时代,ARM改革了一度使用的冗长命名方法,转为另一种看起来比较整齐的命名法:按照应用等级分成3个类别,并以Cortex作为前缀,而且每一个大的系列又换分若干小的系列。ARM体系结构与ARM内核的对应关系如图1.3-1。

图1.3-1 ARM处理器架构进化史
ARM的Cortex系列处理器分为三种:Cortex-A、Cortex-R和Cortex-M,每种系列都有其特定的使用场景。
Cortex-A系列处理器:主要用于高性能计算设备,如智能手机、平板电脑、个人电脑和服务器等。它们通常具有较高的时钟频率和更大的存储容量,面向尖端的基于虚拟内存的操作系统和用户应用,因此也被称为应用程序处理器。
Cortex-R系列处理器:专为实时应用程序设计,如实时嵌入式系统中的自动驾驶、工控系统和医疗设备等。这些处理器针对实时系统,面向深层的嵌入式实时应用,能够处理需要快速响应和高可靠性的任务。
Cortex-M系列处理器:专为嵌入式系统设计,用于低功耗、实时控制和物联网设备。它们被广泛应用于各种应用,包括智能家居、汽车电子、医疗设备、工业自动化等领域。Cortex-M系列处理器具有低功耗、高性能、实时性、易于开发等特点,能够满足微控制器领域对于快速且具有高确定性的中断管理,以及低功耗和低成本的需求。
目前市场上比较流行的几大系列微处理,按性能、功能和处理能力划分如图1.3-2.

图1.3-2 ARM处理器性能示意图
我们教程主要讲述的是目前被控制领域广泛使用的基于Cortex-M3内核的STM32F103微控制器。
1.4 STM32简介
1.4.1 基于Cortex内核的MCU
前面介绍了ARM公司推出的Cortex处理器,但却无法从ARM公司直接购买到这样一款ARM处理器芯片。按照ARM公司的经营策略,它只负责设计处理器IP核,而不生产和销售具体的处理器芯片。
ARM-Cortex处理器内核是微控制器的中央处理单元(CPU)。完整的基于Cortex的MCU(MicroController Unit)还需要很多其他组件。在芯片制造商得到Cortex处理器内核的使用授权后,它们就可以把Cortex内核用在自己的硅片设计中,添加存储器、外设、I/O及其他功能块,即为基于Cortex的微控制器。不同厂家设计出的MCU会有不同的配置,包括存储器容量、类型、外设等都各具特色。以STM32的Cortex-M3内核为例,Cortex-M3内核和基于Cortex-M3的MCU关系如图1.4-1所示。

图1.4-1 Cortex-M3内核与基于Cortex-M3内核MCU关系图
1.4.2 什么是STM32
STM32是意法半导体(STMicroelectronics)公司推出的32位ARM Cortex-M内核微控制器系列。从字面上来理解,ST代表意法半导体,M是Microelectronics的缩写,而32则表示32位。这一系列微控制器具有高性能、低功耗、可靠性强等特点,广泛应用于工业控制、智能家居、汽车电子、医疗设备等领域。
STM32系列微控制器采用了多种ARM Cortex-M内核,如Cortex-M0、Cortex-M3、Cortex-M4等,具有不同的性能和功能特点,可根据应用场景的需求进行选择。STM32系列单片机采用了先进的低功耗技术,可以在不降低性能的情况下降低功耗,适合需要长时间运行或在电池供电的设备中使用。STM32作为一款功能强大的微控制器,以其高性能、低功耗和广泛的应用领域,赢得了工程师和市场的青睐。

.图1.4-2意法半导体公司Logo
1.4.3 STM32产品线简介

图1.4-3 STM32产品线
STM32 从 2007 年推出至今,已经有 18 个系列,超过 1000 个型号。STM32系列微控制器适合多种应用场景,其强大的功能和性能使得它能够胜任许多复杂的任务,以下是一些STM32的典型应用场景:
- 工业自动化:STM32在工业自动化领域发挥着重要作用,包括工厂自动化、机器人控制、传感器接口和数据采集等方面。它可以与各种传感器和执行器集成,实现远程控制和自动化功能,从而帮助实现高效的工业自动化系统。
- 消费电子:STM32广泛应用于智能手机、平板电脑、家庭娱乐系统、数字相机和音频设备等消费电子产品中。它提供了强大的处理能力和丰富的功能集成,为这些产品提供了卓越的性能和用户体验。
- 汽车电子:在汽车电子领域,STM32的应用也非常广泛。它可以用于发动机控制、车身电子系统、车载娱乐系统和驾驶员辅助系统等。其高性能和可靠性确保了车辆的安全性和功能的高度集成。
- 物联网:STM32非常适用于开发物联网设备,如智能传感器、网关、路由器等。它可以实现设备之间的互联互通,为物联网应用提供可靠的数据传输和控制功能。
- 智能家居:STM32可以与各种智能家居设备相连,实现智能化控制。例如,它可以控制智能插座、智能灯泡、智能门锁等设备,提供便捷和舒适的家居环境。
- 医疗设备:STM32在医疗设备中也扮演着重要角色,如心电图仪、血压计、血糖仪和医疗图像处理等。其高性能和可靠性确保了医疗设备的准确性和安全性。
此外,STM32还可以用于无人机和机器人的控制系统开发,提供高性能的实时控制和传感器处理能力。同时,它也可以用于开发各种嵌入式设备,如测试仪器、智能卡等。
而下面的场景是绝大多数STM32控制器(不是全部)不太适合处理的,或者下面这些场景下并不推荐使用STM32,列举如下:
- 程序代码较大的应用:STM32微控制器的存储空间相对有限,其FLASH大小通常在几百KB到几MB之间。对于程序代码超过1MB的大型应用,STM32可能无法满足存储需求。在这种情况下,可能需要考虑使用具有更大存储空间的处理器或微控制器。
- 基于Linux或Android的应用:STM32微控制器更适合运行轻量级的操作系统或实时操作系统(RTOS),而不是像Linux或Android这样的复杂操作系统。这些操作系统通常需要更高的处理器性能、更大的内存和存储空间,以及更丰富的外设接口。因此,基于Linux或Android的应用更适合使用性能更强大的处理器或嵌入式系统。
- 需要极高计算能力的场景:STM32虽然是一款性能出色的微控制器,但在需要极高计算能力的场景中,如高性能计算、大型数据处理或复杂图像识别等,其计算能力可能无法满足需求。在这种情况下,可能需要选择更强大的处理器或计算单元。
如图1.4-3所示STM32的产品线,STM32 目前总共有 5 大类,18 个系列,简单总结如下表:
表1.4-1 STM32分类说明

根据上表,可见STM32 主要分两大类,MCU 和 MPU,MCU 就是我们常见的STM32微控器,不能跑 Linux,而 MPU 则是 ST 在 19 年才推出的微处理器,可以跑 Linux。STM32的MCU 提供了包括:基础入门、混合信号、高性能、超低功耗和无线等 5 方面应用的产品型号,我们可以根据自己的实际需要选择合适的 STM32 来设计。比如,我们的产品对性能要求比较高,则可以选择 ST 的高性能 MCU,包括:F2、F4、F7、H7 等 4 个系列的产品;又比如想做超低功耗,则可以选择 ST 的超低功耗 MCU,L 系列的产品。
由于 STM32 系列有很好的兼容性,我们只要能够熟练掌握其中一任何一款 MCU,就可以
很方便的学会并使用其他系列的 MCU。比如学好了 STM32F103,再去学 F4/F7/H7 就比较容易
学会,由于 STM32F103 系列最早推向市场,资料和教程都是最多的,在市场上的使用也是最为
广泛,所以对于没有接触过 STM32 的初学者来说,建议先学习 STM32F103,再去学习其他的 STM32 系列。本专栏介绍的STM32F103C8T6属于主流 MCU 分类里面的基础型 F1 系列。下面我们对STM32常见的几类控制器再进行进一步的介绍。
[1].STM32F1系列(主流类型)
STM32F1系列微控制器包含以下5个产品线,它们的引脚、外设和软件均兼容。
(1)STM32F100,超值型,24MHzCPU,具有电机控制和CEC功能。
(2)STM32F101,基本型,36MHzCPU,具有高达1MB的Flash。
(3)STM32F102,USB基本型,48MHz CPU,具备USBFS。
(4)STM32F103,增强型,72MHzCPU,具有高达1MB的Flash、电机控制、USB和CAN。
(5)STM32F105/107,互联型,72MHz CPU, 具有以太网MAC、CAN和USB2.0 OTG。
[2]. STM32F4系列(高性能类型)
STM32F4系列微控制器基于Cortex-M4内核,采用意法半导体有限公司的90nmNVM工艺和ART加速器,在高达180MHz工作频率下通过闪存执行时,处理性能达225DMIPS/608CoreMark。由于采用了动态功耗调整功能,通过闪存执行时的电流消耗范围为STM32F401的128μA/MHz到STM32F439的260μA/MHz。
STM32F4系列包括8条互相兼容的数字信号控制器(Digital SignalController,DSC)产品线,是MCU实时控制功能与DSP信号处理功能的完美结合体。
(1)STM32F401,84MHz CPU/105DMIPS,尺寸最小、成本最低的解决方案,具有卓越的功耗效率(动态效率系列)。
(2)STM32F410,100MHz CPU/125DMIPS,采用新型智能DMA,优化了数据批处理的功耗(采用批采集模式的动态效率系列),配备的随机数发生器、低功耗定时器和DAC,为卓越的功率效率性能设立了新的里程碑(停机模式下89μA/MHz)。
(3)STM32F411,100MHz CPU/125DMIPS,具有卓越的功率效率、更大的SRAM和新型智能DMA,优化了数据批处理的功耗(采用批采集模式的动态效率系列)。
(4)STM32F405/415,168MHz CPU/210DMIPS,高达1MB的Flash闪存,具有先进连接功能和加密功能。
(5)STM32F407/417,168MHz CPU/210DMIPS,高达1MB的Flash闪存,增加了以太网MAC和照相机接口。
(6)STM32F446,180MHz CPU/225DMIPS,高达512KB的Flash闪存,具有DualQuad SPI和SDRAM接口。
(7)STM32F429/439, 180MHz CPU/225DMIPS, 高达2MB的双区闪存,带SDRAM接口、Chrom-ART加速器和LCD-TFT控制器。
(8)STM32F427/437,180MHz CPU/225DMIPS,高达2MB的双区闪存,具有SDRAM接口、Chrom-ART加速器、串行音频接口,性能更高,静态功耗更低。
(9)SM32F469/479,180MHz CPU/225DMIPS,高达2MB的双区闪存,带SDRAM和QSPI接口、Chrom-ART加速器、LCD-TFT控制器和MPI-DSI接口。
[3]. STM32F7系列(高性能类型)
STM32F7是世界上第一款基于Cortex-M7内核的微控制器。它采用6级超标量流水线和浮点单元,并利用ST的ART加速器和L1缓存,实现了Cortex-M7的最大理论性能。无论是从嵌入式闪存还是外部存储器来执行代码,都能在216MHz处理器频率下使性能达到462DMIPS/1082CoreMark。由此可见,相对于意法半导体以前推出的高性能器控制器,如F2、F4系列,STM32F7的优势就在于其强大的运算性能,能够适用于那些对高性能计算有巨大需求的应用。STM32F7系列与STM32F4系列引脚兼容,包含以下STM32F7x5子系列,STM32F7x6子系列、STM32F7x7子系列和STM32F7x9子系列,四个产品线。
[4]. STM32L1系列(超低功耗类型)
STM32L1系列微控制器基于Corter-M3内核,采用意法半导体专有的超低泄漏制程,具有创新型自主动态电压调节功能和5种低功耗模式,为各种应用提供了完美的平台灵活性。STM32L1扩展了超低功耗的理念,并且不会牺牲性能。与STM32L0一样,STM32L1提供了动态电压调节、超低功耗时钟振荡器、LCD接口、比较器、DAC及硬件加密等部件。
STM32L1系列微控制器可以实现在1.65~3.6V范围内以32MHz的频率全速运行其功耗参考值如下:
(1)动态运行模式,低至177μA/MHz。
2)低功耗运行模式:低至9μA。
(3)超低功耗模式+备份寄存器+RTC:900nA(3个唤醒引脚)。
(4)超低功耗模式+备份寄存器:280nA(3个唤醒引脚)。
除了超低功耗MCU以外,STM32L1还提供了多种特性、存储容量和封装引脚数选项。如 32~512KB Flash 存储器、高达 80KB的SDRAM、16KB真正的嵌入式EEPROM、48~144个引脚。为了简化移植步骤和为工程师提供所需的灵活性,STM32L1与不同的STM32F系列均引脚兼容。STM32L1系列微控制器包含4款不同的子系列:STM32L100超值型、STM32L151、STM32L152(LCD)和STM32L162(LCD和AES-128)。
[5]. STM32-MP1(可跑Linux)
STM32-MP1是意法半导体(STMicroelectronics)推出的一款功能丰富的微控制器,它采用了灵活的异构计算架构,集成了高性能的ARM Cortex-A7应用处理器内核和高效的Cortex-M4微控制器内核。
在STM32-MP1中,Cortex-A7内核的时钟频率可以达到650MHz,配备了32-Kbyte的L1指令高速缓存、32-Kbyte的一级数据高速缓存和256-Kbyte的二级高速缓存。这使得它在执行复杂的数据处理和操作系统任务时具有出色的性能。而Cortex-M4内核则专注于实时处理和低功耗任务,其运行频率为209MHz,并配备了单精度浮点单元(FPU)、全套数字信号处理器(DSP)指令和内存保护单元(MPU),从而增强了应用程序的安全性和效率。
此外,STM32-MP1还具备一个可选的兼容OpenGL的3D GPU,可用于执行高级HMI开发任务。它提供了时钟频率为533MHz的DDR和LPDDR接口,支持经济实惠的DDRSDRAM存储器,如DDR3、DDR3L、LPDDR2和533MHz的32/16位LPDDR3。这样的设计有助于Cortex-M4内核在实时处理和低功耗模式下实现更高效的操作。
STM32-MP1系列微控制器在生态系统方面具有诸多优势,每个产品线都配备了安全选项,如加密和安全启动功能。这使得它在各种应用中都能达到卓越的性能和低功耗效果。此外,STM32-MP1特别适用于长寿命工业应用,公司提供了滚动的10年使用寿命承诺,为设计人员、产品经理和采购团队提供了组件在其设计的整个生命周期中始终可用的保证。
综上所述,STM32-MP1具有强大的性能和丰富的功能,完全能够胜任运行Linux系统的任务,为嵌入式系统和物联网设备的开发提供了强大的支持。
1.4.4 STM32的命名规则
STM32 的产品名字里面包含了:家族、类别、特定功能、引脚数、闪存容量、封装、温度范围等重要信息,这些信息可以帮助我们识别和区分 STM32 不同芯片。STM32的命名规则可参考下图 1.4-4.后面遇到STM32 型号的产品,都可以按图1.4-4 所示命名规则进行区分解读。

图1.4-4 STM32命名规则
第2章.STM32开发C语言常用知识点
2.1. STM32嵌入式开发C语言编程的不同
STM32开发中的C语言编程与通用计算机编程之间存在一些显著的区别,这些区别主要源于两者不同的应用场景和硬件环境。如下图2.1-1,区别主要体现在以下五个方面:

图2.1-1 STM32嵌入式开发C语言编程和通用编程的区别点
- 硬件相关性:
- STM32开发中的C语言编程直接关联到特定的硬件,如微控制器、IO端口、中断、DMA等。开发者需要直接操作这些硬件资源,因此必须了解相关的硬件手册和寄存器配置。
- 通用计算机编程则更多关注于软件设计和算法实现,与硬件的关联度较低。开发者通常不需要直接操作硬件寄存器,而是通过操作系统提供的API进行编程。
- 资源限制:
- STM32等嵌入式系统通常具有有限的内存、存储空间和计算能力。因此,在STM32开发中,C语言编程需要特别注意内存管理、代码优化和性能调优。
- 通用计算机则具有较大的内存和存储空间,以及强大的计算能力。开发者在编写通用计算机程序时,通常不需要过分关注这些资源限制。
- 实时性要求:
- STM32等嵌入式系统通常需要满足严格的实时性要求,即系统需要在规定的时间内响应外部事件。因此,在STM32开发中,C语言编程需要特别注意时间管理和代码执行效率。
- 通用计算机编程则通常不需要满足如此严格的实时性要求。
- 开发工具和环境:
- STM32开发通常使用专门的嵌入式开发环境和工具链,如Keil MDK、IAR Embedded Workbench、STM32CubeIDE等。这些工具提供了针对STM32硬件的特定支持和优化。
- 通用计算机编程则可以使用各种通用的集成开发环境(IDE),如Visual Studio、Eclipse、Dev-C++等。
- 调试和测试:
- STM32开发中的调试和测试通常需要借助专门的调试器、仿真器和测试工具,以模拟硬件环境和验证程序功能。
- 通用计算机编程则可以使用各种调试器和测试框架,以方便地进行程序调试和测试。
总之,STM32开发中的C语言编程与通用计算机编程在硬件相关性、资源限制、实时性要求、开发工具和环境以及编程语言特性等方面存在显著的区别。这些区别要求开发者在编写STM32程序时,需要更加注重底层编程和硬件操作,并充分考虑到嵌入式系统的特殊性和限制。
2.2. C语言常用知识点
我们这里就列举部分 STM32 学习中会遇见的 C 语言基础知识点。
2.2.1 位操作
C 语言位操作就是对基本类型变量可以在位级别进行操作。C 语言支持如下表6种位操作:
表2.2-1-C语言支持的位操作
| 运算符 | 含义 |
| & | 按位与 |
| | | 按位或 |
| ^ | 按位异或 |
| ~ | 按位取反 |
| << | 左移 |
| >> | 右移 |
这些按位与或,取反,异或,右移,左移这些我们就不多做详细讲解,毕竟这里不是给大家普及C语言的基本知识,不清楚的大家可以再复习一下。下面我们着重讲解位操作在嵌入式开发中的一些实用技巧。
1.在不改变其他位的值的状况下对某几个位进行设值
这个场景在单片机开发中经常使用,方法就是先对需要设置的位用"&"操作符进行清零操作,然后用"|"操作符设值。比如我要改变 GPIOA 的状态,可以先对寄存器的值进行&清零操作:
GPIOA->CRL &= 0XFFFFFF0F; /* 将第 4~7位清 0 */
/*然后再与需要设置的值进行|或运算:*/
GPIOA->CRL |= 0X00000040; /* 设置相应位的值(4),不改变其他位的值 */ 2.移位操作提高代码的可读性
移位操作在单片机开发中非常重要,下面是 delay_init 函数的一行代码:
SysTick->CTRL |= 1 << 1;这个操作就是将 CTRL 寄存器的第 1 位(从 0 开始算起)设置为 1,为什么要通过左移而不是直接设置一个固定的值呢?其实这是为了提高代码的可读性以及可重用性。这行代码可以很直观明了的知道,是将第 1 位设置为 1。如果写成:
SysTick->CTRL |= 0X0002;这个虽然也能实现同样的效果,但是可读性稍差,而且修改也比较麻烦。
3.~按位取反操作使用技巧
按位取反在设置寄存器的时候经常被使用,常用于清除某一个/某几个位。下面是 delay_us函数的一行代码:
SysTick->CTRL &= ~(1 << 0) ; /* 关闭 SYSTICK */ 该代码可以解读为 仅设置 CTRL 寄存器的第 0 位(最低位)为 0,其他位的值保持不变。同样我们也不使用按位取反,将代码写成:
SysTick->CTRL &= 0XFFFFFFFE; /* 关闭 SYSTICK */ 可见前者的可读性,及可维护性都要比后者好很多。
4.^按位异或操作使用技巧
该功能非常适合用于控制某个位翻转,常见的应用场景就是控制 LED 闪烁,如:
GPIOB->ODR ^= 1 << 5;执行一次该代码,就会使 PB5 的输出状态翻转一次,如果我们的 LED 接在 PB5 上,就可以看到 LED 闪烁了。
2.2.2 define 宏定义
define 是 C 语言中的预处理命令,它用于宏定义(定义的是常量),可以提高源代码的可读性,为编程提供方便。常见的格式:
#define 标识符 字符串"标识符"为所定义的宏名;"字符串"可以是常数、表达式、格式串等。例如:
#define PIE 3.14159fPIE在后续出现的地方都代表3.14159。后续如果想修改π的值,可以直接在宏定义的地方修改,不用再在程序出现的每一个地方再去修改,而且非常直观,代码可读性强。
2.2.3 条件编译
2.2.3.1 #ifdef
嵌入式程序开发过程中,经常会遇到一种情况,当满足某条件时对一组语句进行编译,而当条件不满足时则编译另一组语句。条件编译命令最常见的形式为:
#ifdef 标识符
程序段 1
#else
程序段 2
#endif 它的作用是:当标识符已经被定义过(一般是用#define 命令定义),则对程序段 1 进行编译,否则编译程序段 2。 其中#else 部分也可以没有,即:
#ifdef
程序段 1
#endif 2.2.3.2 #ifndef
#ifndef SOME_MACRO
// 如果 SOME_MACRO 没有被定义,则编译以下代码
#endif2.2.3.3 #if !defined
#if !defined(SOME_MACRO)
// 如果 SOME_MACRO 没有被定义,则编译以下代码
#endif这也是检查是否没有定义某个宏的方法,但它使用了!defined操作符.
在这个例子中!defined(SOME_MACRO) 是一个条件表达式,当 SOME_MACRO 没有被定义时,该表达式的值为真(非零),从而编译 #if 和对应 #endif 之间的代码。下面是STM32里的一段代码:
#if !defined (HSE_VALUE)
#define HSE_VALUE 24000000U
#endif 如果没有定义HSE_VALUE这个宏,则定义HSE_VALUE宏,并且HSE_VALUE的值为24000000U。24000000U中的U表示无符号整型,常见的,UL表示无符号长整型,F表示浮点型。这里加了U以后,系统编译时就不进行类型检查,直接以U的形式把值赋给某个对应的内存,如果超出定义变量的范围,则截取。
2.2.4 extern 变量声明
C 语言中 extern 可以置于变量或者函数前,以表示变量或者函数的定义在别的文件中,提示编译器遇到此变量和函数时在其他模块中寻找其定义。这里面要注意,对于extern声明变量可以多次,但定义只有一次。在我们的代码中你会看到看到这样的语句:
extern uint16_t speed_x; 这个语句是申明 speed_x变量在其他文件中已经定义了,在这里要使用到。所以,你肯定可以找到在某个地方有变量定义的语句:
uint16_t speed_x;2.2.5 typedef 类型别名
typedef 用于为现有类型创建一个新的名字,或称为类型别名,用来简化变量的定义。
例如C99标准中引入的头文件<stdint.h>,定义了一组具有固定宽度的整数类型,包括有符号和无符号的8位、16位、32位和64位整数。这些类型分别命名为int8_t、int16_t、int32_t、int64_t(以及对应的无符号类型uint8_t、uint16_t、uint32_t、uint64_t)。在STM32F10x的标准库函数stm32f10x.h中又对这些数据类型进行了重新定义,代码如下:
typedef int32_t s32;
typedef int16_t s16;
typedef int8_t s8;
typedef uint32_t u32;
typedef uint16_t u16;
typedef uint8_t u8;typedef在 MDK 用得最多的就是定义结构体的类型别名和枚举类型了。
struct _GPIO
{
__IO uint32_t CRL;
__IO uint32_t CRH;
…
}; 定义了一个结构体 GPIO,这样我们定义结构体变量的方式为:
struct _GPIO gpiox; /* 定义结构体变量 gpiox */ 但是这样很繁琐,MDK中有很多这样的结构体变量需要定义。这里我们可以为结体定义一
个别名GPIO_TypeDef,这样我们就可以在其他地方通过别名GPIO_TypeDef来定义结构体变量了,方法如下:
typedef struct
{
__IO uint32_t CRL;
__IO uint32_t CRH;
…
} GPIO_TypeDef; Typedef为结构体定义一个别名GPIO_TypeDef,这样我们可以通过GPIO_TypeDef来定义结构体变量:
GPIO_TypeDef gpiox;这里的 GPIO_TypeDef 就跟 struct _GPIO 是等同的作用了,但是 GPIO_TypeDef 使用起来方便很多。
2.2.6 结构体
在C语言中,结构体(struct)是一种用户自定义的数据类型,它允许你将不同类型的数据项组合成一个单独的数据结构。结构体可以用来表示一个具有复杂属性的实体,比如一个人(具有姓名、年龄、性别等属性)或者一本书(具有书名、作者、出版日期等属性)。
2.2.6.1 结构体的声明和定义
/*声明结构体类型: */
struct 结构体名
{
成员列表;
}变量名列表; 你可以在声明结构体的时候直接创建结构体变量,也可以先定义结构体类型,然后再创建变量,如下面几种方式都是可以的:
// 直接定义并创建结构体变量
struct {
int age;
char name[50];
} person1;
// 直接定义并创建结构体变量
struct Person{
int age;
char name[50];
} person2;
// 先定义结构体类型,再创建变量
struct Person {
int age;
char name[50];
};
struct Person person3;2.2.6.2 引用结构体成员变量
要访问结构体变量的成员,你需要使用.运算符(对于结构体变量)或->运算符(对于指向结构体的指针)。
/*接前面章节2.6.1的示例代码*/
// 访问结构体变量的成员
person1.age = 25;
// 如果有一个指向结构体的指针
struct Person *ptr = &person2;
ptr->age = 30; 2.2.6.3 结构体的作用
下面我们将简单的通过一个实例描述一下结构体的作用。
在我们单片机程序开发过程中,经常会遇到要初始化一个外设比如串口,它的初始化状态是由几个属性来决定的,比如串口号,波特率,极性,以及模式。对于这种情况,在我们没有学习结构体的时候,我们一般的方法是:
void usart_init(uint8_t usartx, uiut32_t BaudRate, uint32_t Parity,
uint32_t Mode); 这种方式是有效的同时在一定场合是可取的。但是试想,如果有一天,我们希望往这个函数里面再传入一个/几个参数,那么势必我们需要修改这个函数的定义,重新加入新的入口参数,随着开发不断的增多,那么是不是我们就要不断的修改函数的定义呢?这是不是给我们开发带来很多的麻烦?那又怎样解决这种情况呢?
我们使用结构体参数,就可以在不改变入口参数的情况下,只需要改变结构体的成员变量就可以达到改变入口参数的目的。
结构体就是将多个变量组合为一个有机的整体,上面的函数usartx,BaudRate,Parity,Mode等这些参数,他们对于串口而言,是一个有机整体,都是来设置串口参数的,所以我们可以将他们通过定义一个结构体来组合在一个。MDK中是这样定义的:
typedef struct
{
uint32_t BaudRate;
uint32_t WordLength;
uint32_t StopBits;
uint32_t Parity;
uint32_t Mode;
uint32_t HwFlowCtl;
uint32_t OverSampling;
} UART_InitTypeDef; 这样,我们在初始化串口的时候入口参数就可以是 USART_InitTypeDef 类型的变量或者指针变量了,于是我们可以改为:
void usart_init(UART_InitTypeDef *huart); 这样,任何时候,我们只需要修改结构体成员变量,往结构体中间加入新的成员变量,而不需要修改函数定义就可以达到修改入口参数同样的目的了。这样的好处是不用修改任何函数定义就可以达到增加变量的目的。
在以后的开发过程中,如果你的变量定义过多,如果某几个变量是用来描述某一个对象,你可以考虑将这些变量定义在结构体中,这样也许可以提高你的代码的可读性。使用结构体组合参数,可以提高代码的可读性,不会觉得变量定义混乱。
2.2.6.4 结构体成员的内存分布与对齐
首先一些基本知识点:
(1)声明一个结构体类型的时候是没有为它分配任何存储空间的,只有在定义结构体变量的时候,才会为变量分配存储空间。
(2)结构体中可以有不同的数据类型成员,成员在定义时依次存储在内存连续的空间中,结构体变量的首地址就是第一个成员的地址,内存偏移量就是各个成员相对于第一个成员地址的差(即,把低位内存分配给最先定义的变量)。
(3)理论上,结构体所占用的存储空间是各个成员变量所占的存储空间之和,但是为了提高CPU的访问效率,采用了内存对齐方式:
①结构体的每一个成员起始地址必须是自身类型大小的整数倍,若不足,则不足部分用数据填充至所占内存的整数倍。
②结构体大小必须是结构体占用最大字节数成员的整数倍,这样在处理数组时可以保证每一项都边界对齐根据上面的说明,我们举例子分析如下:
struct test
{
char a;
int b;
float c;
double d;
}mytest; 这个结构体所占用的内存怎么算呢?理论结果为17,实际上并不是17,而是24。为什么会这样呢?这个就是前面我们说的内存对齐。
char型变量占1个字节,所以它的起始地址是0。int类型占用4个字节,它的起始地址要求是4的整数倍数,那么内存地址1、2、3就需要被填充(被填充的内存不适于变量),b从4开始。float类型也是占用4个字节,起始地址要求是4的倍数,所以c的起始地址就是8。double类型变量占用8个字节,起始地址为16,12~15被填充。这里,第一个成员a的地址首地止,第二个成员b的偏移量为4,第三个成员c的偏移量是8,以此类推,是如下图2.6-1所示:

图2.6-1 结构地地址内存分配
2.2.7 关键字
在STM32的一些库函数头文件中,经常会看到如下代码, 表示将 volatile 或者 volatile const 来代替某一个符号。
#define __I volatile
#define __O volatile
#define __IO volatile
#define __IM volatile const
#define __OM volatile
#define __IOM volatile 2.2.7.1 volatile
volatile 表示强制编译器减少优化,告诉编译器必须每次去内存中取变量值。
程序运行时数据是存储在主内存(物理内存)中的,每个线程先从主内存拷贝变量到对应的寄存器中。对没有加volatile的变量进行读写时,为了提高读取速度,编译器进行优化时,会先把主内存中的变量读取到一个寄存器中,以后,再读取此变量的值时,就直接从该寄存器中读取,而不是直接从内存中读取了,这样的读写速度比较快。如果其它程序改变了内存中变量的值,上面已经保存到寄存器中的值不会跟着改变,从而造成应用程序读取的值和实际的变量值不一致。加了修饰关键字volatile以后的变量,表示不想被编译器优化掉,每次都要从内存中读取该变量的数据,不会用寄存器里的值,这样确保了数据的准确性,但影响了效率。
2.2.7.2 const
const称为常量限定符,用来限定特定变量为只读属性,如果修改此变量,则编译器会报错。const修饰的变量存储在只读数据段,在程序结束时释放,而const局部变量存储在栈中,代码块结束时释放。用const定义变量时就要初始化该变量:
const int a = 1; 2.2.7.3 static
static关键字修饰的变量称为静态变量,如果该变量在声明时未赋初始值,则编译器自动初始化为0,静态变量存储在全局区(静态区)。
在函数内被static声明的变量,仅能在本函数中使用,也叫静态局部变量。
在文件内(函数体外)被static声明的变量,仅能被本文件内的函数访问,不能被其他文件中的函数访问,也叫静态全局变量。
静态全局变量和普通的全局变量不同,静态全局变量仅限于本文件中使用,在其它文件中可以定义一个与静态全局变量名字相同的变量。普通的全局变量可以通过extern外部声明后被其他文件使用,也就是整个工程可见,而且其他文件不能再定义一个与普通全局变量名字相同的变量了。
用static修饰的函数和用static修饰的变量类似。 下面是用法举例说明:
1.局部静态变量:
当在函数内部声明一个变量为static时,该变量的存储期将变为整个程序的执行期,而不是只在函数调用被时存在。这意味着局部变量只会被初始化一次,并且会保留其值,直到程序结束。这在需要跨函数调用保留某些信息时非常有用。
void func() {
static int count = 0; // 只在程序开始时初始化一次
count++;
printf("%d\n", count);
}每次调用func()时,count的值都会递增。
2.全局静态变量:
在文件级别(即不在任何函数内部)声明的static变量只能在该文件内部可见。这意味着它们只能被定义它们的文件内的函数访问,而不能被其他文件访问。这提供了一种封装机制,允许你在一个文件中定义和使用变量,而不用担心与其他文件冲突。
// file1.c
static int file_scope_var = 42; // 只能在file1.c中访问
// file2.c
extern int file_scope_var; // 错误:无法在其他文件中访问file_scope_var3.静态函数:
当在文件级别使用static关键字声明一个函数时,该函数将具有内部链接,即它只能在其定义的文件内被调用。这提供了另一种封装机制,允许你隐藏函数的实现细节,只暴露需要被其他文件使用的函数。
// file1.c
static void internal_function() {
// ...
}
// file2.c
extern void internal_function(); // 错误:无法在其他文件中调用internal_function4.静态初始化:
尽管这不是static的直接用途,但它在静态初始化中扮演了重要角色。当全局变量或静态变量被声明并赋予初值时,编译器会确保在程序开始执行之前进行初始化。这通常是在main()函数之前发生的。
2.2.8 指针
在STM32开发中,指针的作用十分重要。首先,指针是C语言的一个重要组成部分,它允许我们通过内存地址直接访问和操作数据。在STM32这样的嵌入式系统开发中,指针的使用与底层硬件的联系尤为密切。
具体来说,STM32库开发中,我们对寄存器进行了封装,将寄存器放入到结构体(如GPIOX)当中。通过指针,我们可以指向这些结构体的地址,从而访问和操作寄存器,完成对寄存器的配置。这种方式可以减少开发时的代码量,提高开发效率。
同时,指针移位操作在STM32开发中也是常见的。通过指针移位,我们可以方便地访问连续的内存区域,比如数组或结构体中的连续元素。在C语言中,我们可以通过指针算术运算(如加法、减法)来实现指针的移位。需要注意的是,在进行指针移位操作时,应确保指针类型和指向的数据类型一致,并遵循C语言指针算术运算的规则。
此外,指针还可以用于访问和操作内存映射的硬件寄存器。在STM32中,许多硬件资源都是通过内存映射的方式暴露给软件的。通过指针,我们可以直接访问这些硬件寄存器的地址,从而实现对硬件的控制和配置。
总的来说,指针在STM32开发中具有重要的作用,它允许我们通过内存地址直接访问和操作数据,实现对硬件的底层控制和优化。然而,由于指针直接操作内存地址,因此在使用时也需要格外小心,以避免出现内存泄漏、野指针等问题。
指针的具体使用方法,这里就不再赘述。
第3章.STM32F1x系统架构及资源介绍
3.1.STM32F1x系统架构

图3.1-1STM32F1x系统架构图
如图3.1-1所示为STM32F1系列的系统架构图。蓝色为被动单元,绿色为主动单元。主动和被动单元之间通过总线矩阵连接。STM32F1x各总线和设备总结如下图3.1-2.

图3.1-2 STM32F1x总线简介
3.1.1-ICode总线
ICode总线是指令总线,它的主要作用是连接Cortex-M3内核与FLASH存储器的指令接口。具体来说,ICode总线用于加载FLASH闪存中的程序指令。当我们编写的程序被编译后,它会转换为一条条机器指令,并存储在FLASH闪存中。Cortex-M3内核通过ICode总线可以获取这些指令,并按顺序执行代码。因此,ICode总线在STM32F1系列单片机中起到了关键的作用,确保内核能够正确地读取并执行程序指令。ICode总线直接连接Flash接口,不需要经过总线矩阵。
3.1.2-DCode总线
DCode总线是数据总线。它主要负责从Flash存储器或其他非易失性存储器中取指(Fetch),即将指令读取到指令流水线中。具体来说,DCode总线是Cortex-M3内核与存储器系统之间指令传输的通道,确保CPU能够按照程序顺序执行存储在存储器中的指令。此外,DCode总线还用于加载数据,如常量和调试数据等。Cortex-M3内核可以通过DCode总线访问Flash闪存和SRAM中的数据。在实际应用中,变量通常会储存在内部的SRAM中,而Flash闪存中则会储存程序所用到的常量。
那么ICode总线和DCode总线有什么区别呢?
ICode总线主要承担的是指令的预取任务。它将M3内核指令总线和闪存指令接口相连接,确保CPU能够正确且高效地获取存储在Flash闪存中的指令。这一过程对于单片机的正常运行至关重要,因为只有获取到正确的指令,CPU才能按照程序设定的逻辑进行工作。
而DCode总线则主要负责数据的传输和访问。它将M3内核的DCode总线与闪存存储器的数据接口相连接,使得CPU能够读取Flash中存储的全局变量的数值以及其他数据(例如常量)。此外,DCode总线还负责常量加载和调试访问,这些都是在数据传输和访问过程中必须完成的任务。
3.1.3-System总线
系统总线连接Cortex-M3内核系统总线到总线矩阵,从而连接Cortex-M3内核与外设寄存器,确保CPU能够高效、准确地访问和操作这些外设。通过system系统总线,CPU可以读取外设的状态信息,了解外设的当前工作状况;同时,CPU还可以向外设发送控制指令,实现对外设的精确控制。此外,system系统总线还负责在CPU和外设之间进行数据传输,无论是读取传感器数据还是向执行器发送指令,都需要通过这条总线来完成。
system系统总线的存在,使得STM32F1系列单片机能够灵活地控制和管理各种外设,实现复杂的系统功能。它是单片机与外设之间通信和数据传输的关键通道,确保了单片机系统的正常运行和高效性能。
3.1.4-总线矩阵
总线矩阵主要用于连接Cortex-M内核、DMA控制器、外设和存储器,实现这些组件之间的互连和数据传输。
具体来说,总线矩阵通过协调内核系统总线和DMA主控总线之间的访问仲裁,确保多个总线之间的通信和数据传输能够高效、有序地进行。这种协调功能基于轮换算法实现,确保了即使在多个高速外设同时运行的情况下,系统也能实现并发访问和高效运行。此外,总线矩阵还负责管理控制总线之间的访问优先级。这有助于优化系统性能,确保关键数据和指令能够优先传输和处理。
3.1.5-DMA总线
DMA(Direct Memory Access,直接内存访问)总线允许外设设备直接与内存进行数据传输,而无需CPU的干预。这使得数据可以在外设与存储器之间或存储器与存储器之间直接传输,大大提高了数据传输的效率和性能。
DMA传输数据移动过程无需CPU直接操作,从而节省了CPU资源,使其可供其它操作使用。这种数据传输方式不仅提高了CPU的效率,还降低了系统的功耗。
在STM32F1系列单片机中,DMA控制器被集成在内部总线矩阵中。通过DMA控制器的配置和操作,可以实现外设和内存之间的数据传输。STM32F1系列的DMA控制器可能包含多个通道,每个通道专门用来管理来自于一个或多个外设对存储器访问的请求。这些通道可以理解为传输数据的一种管道,通过软件来配置。
3.1.6-AHB/APB总线
AHB总线通过两个桥接与2个APB总线连接。
AHB(Advanced High-performance Bus,高级高性能总线) 主要用于挂载基本或者高性能的外设,确保系统的稳定运行,AHB的最大频率是72MHZ。
APB(Advanced Peripheral Bus,高级外设总线)主要负责连接低速外设,如UART、I2C、I/O接口等。AHB总线注重高性能模块之间的数据交换,而APB总线则更侧重于简单、高效的外设连接。
其中APB又分为高速的APB2和低速的APB1,APB2连接外设中比较重要的外设,APB1连接次重要的外设,如下图3.1-3所示。很多外设的1号通道都配置在了APB2中。APB2的最大频率和AHB一样是72MHZ,APB1的最大频率只有36MHZ。

图3.1-3 STM32F1系列APB2和APB1总线挂载外设图
3.2.STM32F1x片上资源

图3.2-1 STM32F1系列的外设资源
如图3.2-1, 是STM32系列的外设资源,需要注意,有些型号可能并不一定有,具体每个芯片有哪些资源,需要查看对应手册。后面我们的教程就是围绕这些外设展开的。
3.3.STM32F103C8T6引脚定义


图3.3-1 STM32F103C8T6主要参数及引脚
如上图,STM32F103C8T6的引脚排布,左上角一般都会有个标记黑圈等,这个标记左侧的引脚定义为1号引脚,然后按逆时针依次排序。其他型号的芯片一般也都是按这个规则进行引脚定义排布。STM32F103C8T6有48个引脚,各引脚的功能及含义总结如下图:

图3.3-2 STM32F103C8T6各引脚定义
如图3-2.红色标注的是和电源相关的引脚,蓝色是和最小系统有关的引脚,绿色是正常的I/O口,功能口。 引脚的类型以及电平,下图的最下方已经进行了标注,这里不再赘述,下面将一下引脚的这3个功能的含义:
3.3.1 主功能
STM32引脚的主功能是其上电后的默认功能。通常,主功能与引脚名称相同,但也可能存在实际功能与引脚名称不符的情况。在这种情况下,引脚的实际功能应被视为其主功能,而不是引脚名称所指示的功能。主功能涵盖了通信、控制、数据传输等单片机常用的操作。
3.3.2 默认复用功能
在STM32中,GPIO(通用输入输出)引脚具有复用功能,即这些引脚可以被配置为执行除其主要功能之外的其他功能。这种复用功能使得单片机能够在有限的引脚数量上实现更多的外设功能。例如,某些GPIO引脚可以被复用为I2C通信、SPI通信或其他外设的接口。这种复用性是通过软件配置来实现的,使得引脚的功能更加灵活多变。即复用功能就是I/O口上同时连接的外设功能引脚,这个我们可以在配置I/O口的时候选择主功能还是默认复用功能。
3.3.3 重定义功能
在某些情况下,一个外设的引脚除了具有默认的端口外,还可以重新映射,将外设的功能映射到其他的引脚上。这就是引脚的重定义功能,也被称为重映射。这种功能在引脚被其他外设占用,但仍需要其原始外设功能时非常有用。如果有2个功能同时复用在了一个I/O口上,而我们却又确实需要用到这2个功能,我们就可以把其中一个复用功能映射到其他端口,当然前提是这个重定义功能的表里有对应的端口。
3.4.STM32数据手册及资料资源
学习单片机一定要学会查看参考手册。同时提供ST中文社区网站:
ST中文社区网:https://www.stmcu.org.cn

第4章.STM32单片机的最小系统电路
4.1. STM32单片机最小系统电路的组成
单独一个微处理器自己是无法工作的,还必须有供电,时钟,晶振等电路才能正常工作,即最小系统电路。那么STM32的最小系统电路有哪些部分组成呢,如下图4.1-1所示。

图4.1-1.STM32最小系统电路组成
STM32单片机的最小系统主要由以下几个部分组成:
[1].电源电路:这是为STM32芯片提供工作电压的电路部分。通常,STM32的工作电压为3.3V,因此电源电路可能需要使用LDO(低压差线性稳压器)将5V电压转换为3.3V,以满足STM32的工作需求。同时,为了稳定输入电压,电路中还会加入去耦电容进行滤波。一个设计电路图如下图4.1-2.

图4.1.2 STM32供电电路设计
[2].复位电路:复位电路在STM32单片机中起着至关重要的作用。它能在复位时,使单片机的程序计数器回到初始地址(如0000H),从而使程序从起始处重新执行。此外,复位操作还会将寄存器和存储单元的值重置为初始设定值,使单片机能够重新开始执行。STM32中有三种复位方式,分别是上电复位、手动复位和程序自动复位。复位电路如图4.1-3.
[3].时钟电路:时钟电路为STM32单片机提供时钟信号,这是单片机正常工作的基础。时钟电路通常由晶振和相关的电路组成,为单片机提供稳定的时钟频率。STM32主晶振为8MHZ,经过倍频后为72MHZ。
[4].调试接口电路:这是用于下载程序和调试单片机的接口电路,常见的调试接口有JTAG和SWD。
[5].启动配置电路:启动配置通常是通过STM32的BOOT引脚来实现的,这些引脚(如BOOT0和BOOT1)能够支持从内部FLASH启动、系统存储器启动以及内部SRAM启动等多种启动方式。这些启动配置决定了单片机在上电或复位后从哪个存储器区域开始执行程序。
因此,在设计和搭建STM32单片机的最小系统时,启动配置是不可或缺的一部分。它确保了单片机在启动时能够按照预期的方式加载和执行程序,从而实现所需的功能和控制逻辑。

图4.1-3 STM32时钟,复位,调试电路
4.2. STM32单片机的调试接口
调试接口不是系统运行的必需的接口电路,但是为了系统开发、调试、升级等方便,我们在设计最小系统时,可以加上这一部分电路。STM32 系列微处理器内置了一个JTAG和一个SWD接口,通过这两个接口可以控制芯片的运行,并可以获取内部寄存器的信息。这两个接口都要使用GPIO(普通I/O口)来供调试仿真器使用。选用其中一个接口即可将在PC上编译好的程序下载到单片机中运行调试。
4.2.1 JTAG 调试接口
JTAG 是一种国际标准测试协议,主要用于芯片内部测试。标准的JTAG调试接口有4根线,分别为模式选择(TMS)、时钟(TCK)、数据输入(TDI)和数据输出(TDO)线。JTAG 调试接口电路如图4.2-1所示。

图4.2-1 JTAG调试接口电路
4.2.2 SWD接口
图4.2-2所示为SWD接口。在高速模式和数据量大的情况下,通过JTAG下载程序会失败,但是通过SWD下载出现失败的概率会小很多,更加可靠。SWD模式支持更少的引脚接线,所以需要的PCB空间更小,在芯片体积有限的时候推荐使用SWD模式。SWD模式的连接需要2根线,其中SWDIO为双向数据口,用于主机到目标的数据传送;SWDCLK为时钟口,用于主机驱动。

图4.2-2 SWD接口
STM32系列处理器支持两种调试方式,但是采用JTAG占用了大量的PCB的面积,而采用SWD模式则占用得少得多。而且在调试速度等方面,SWD并不比JTAG模式差,所以建议在实际应用中尽量采用SWD进行设计。SWD不是采用标准端口,可以根据自己的需要排列引脚。
4.3. 启动模式
该处很多知识引用自正点原子的开发板资料,这块知识正点原子的资料讲的很透彻。
STM32单片机的程序计数器寄存器的默认值决定了处理器从哪个具体地址去获得第1条需要执行的指令。但是对于处理器来说,无论它挂接的是闪存、内存,还是硬盘,它在启动时是“一无所知”的,我们需要通过硬件设计来告诉它存储第一条指令的外设。STM32系列处理器的第一条执行指令地址是通过硬件设计来实现的。
表4.3-1 启动模式选择

如图表4.3-1,在STM32F10x里,可以通过配置BOOT[1:0]引脚选择3种不同的启动模式。系统复位后,在系统时钟的第4个上升沿到来时,BOOT引脚的值将被锁存,然后被CPU读取。这意味着一旦BOOT引脚的值被确定并锁存,后续改变这些引脚的状态将不会影响已经选择的启动模式。用户可以通过设置BOOT1和BOOTO引脚的状态,来选择在复位后的启动模式。
复位方式有三种:上电复位,硬件复位和软件复位。当产生复位并且离开复位状态后,Cortex-M3 内核做的第一件事就是读取下列两个 32 位整数的值:
(1)从地址 0x0000 0000 处取出堆栈指针 MSP 的初始值,该值就是栈顶地址。
(2)从地址 0x0000 0004 处取出程序计数器指针 PC 的初始值,该值指向复位后执行的
第一条指令。下面用示意图表示,如图4.3-1 所示。
注: 概念解释:MSP
在嵌入式系统或低级编程中,MSP 通常指的是“Main Stack Pointer”,即主堆栈指针。堆栈是一个后进先出(LIFO)的数据结构,用于存储局部变量、返回地址和其他临时数据。MSP 指向堆栈的顶部,是堆栈操作(如入栈和出栈)的关键。
在许多微控制器和处理器中,可能会有多个堆栈,例如主堆栈和进程堆栈,用于不同的任务或线程。MSP 通常与主任务或主线程相关。
与 MSP 相对的是 PSP(Process Stack Pointer),它是进程堆栈指针,用于特定的线程或任务。了解 MSP 和其他相关概念对于理解和编写低级代码,如中断处理程序或操作系统内核代码,是非常重要的。这些概念也与实时操作系统(RTOS)和并发编程密切相关。
简而言之,MSP 是指向主堆栈顶部的指针,用于追踪和管理主线程或任务的堆栈操作
概念解释:程序计数器-PC
PC代表程序计数器(Program Counter)。它是一个16位专用寄存器,用于存放下一条将要执行的指令地址。当执行一条指令时,首先需要根据PC中存放的指令地址,将指令取出送到指令寄存器中,此过程称为“取指令”。与此同时,PC中的地址会自动加1,以便指向下一条将要执行的指令。这样,CPU就可以依次执行每一条指令,保证程序的顺序执行。因此,程序计数器PC是保证程序顺序执行的重要特殊功能寄存器。

图.4.3-1 复位序列
上述过程中,内核是从 0x0000 0000 和 0x0000 0004 两个的地址获取堆栈指针 SP 和程序计
数器指针 PC。事实上,0x0000 0000 和 0x0000 0004 两个的地址可以被重映射到其他的地址空
间。例如:我们将 0x0800 0000 映射到 0x0000 0000,即从内部 FLASH 启动,那么内核会从地
址 0x0800 0000 处取出堆栈指针 MSP 的初始值,从地址 0x0800 0004 处取出程序计数器指针
PC 的初始值。CPU 会从 PC 寄存器指向的地址空间取出的第 1 条指令开始执行程序,就是开始
执行复位中断服务程序 Reset_Handler。将 0x0000 0000 和 0x0000 0004 两个地址重映射到其他的地址空间,就是启动模式选择。
对于 STM32F1 的启动模式,表3-1转为对应地址模式,如图4.3-2.

图4.3-2 STM32启动模式表对应地址
由图4.3-2 可以看到,STM32F1 根据 BOOT 引脚的电平选择启动模式,这两个 BOOT 引脚
根据外部施加的电平来决定芯片的启动地址。
从主闪存FALSH启动:
- 这是STM32F1系列的正常工作模式。
- 当BOOT0=0,BOOT1=x时(其中x可以是0或1,通常推荐BOOT1也设置为0以确保一致性),单片机将从用户闪存(即内部的Flash存储器)启动。
- 用户闪存中通常存储了程序代码和数据,单片机在启动时将从这里读取并执行程序。
从系统存储器启动:
- 这种启动模式主要用于从STM32内部固化的Bootloader程序启动。
- 当BOOT0=1,BOOT1=0时,单片机将从系统存储器启动。
- 系统存储器中包含了一个内置的Bootloader程序,可以用于从串口接收新的程序代码并烧写到用户闪存中,实现程序的远程升级
从内置SRAM启动:
- 这种启动模式通常用于调试目的或特殊应用。
- 当BOOT0=1,BOOT1=1时,单片机将从内部的SRAM(静态随机存取存储器)启动。
- SRAM通常用作程序的临时运行空间,其内容在掉电后会丢失。从SRAM启动通常用于测试或特殊的应用程序,其中程序可能需要在不写入Flash的情况下运行。
第5章.STM32F1x的寄存器和存储器
5.1. 寄存器的概念
寄存器(Register)是单片机内部一种特殊的内存,它可以实现对单片机各个功能的控制,简单的来说可以把寄存器当成一些控制开关,控制包括内核及外设的各种状态。无论是 51单片机还是 STM32单片机,都需要用寄存器来实现各种控制,以完成不同的功能。寄存器是连接软件和硬件的桥梁。
寄存器资源非常宝贵,一般都是一个位或者几个位控制一个功能,对于 STM32 来说,其寄存器是 32 位的,一个 32 位的寄存器,可能会有 32 个控制功能,相当于 32 个开关,由于STM32的复杂性,它内部有几百个寄存器,所以整体来说 STM32 的寄存器还是比较复杂的。 STM32 是由于内部有很多外设,所以导致寄存器很多,实际上我们把它分好类,每个外设也就那么几个或者几十个寄存器。
寄存器可以分为两类,内核寄存器和外设寄存器。如图5.1-1.

图5.1-1 STM32寄存器分类
其中,内核寄存器,我们一般只需要关心中断控制寄存器和 SysTick 寄存器即可,其他三大类,我们一般很少直接接触。而外设寄存器,则是学到哪个外设,就了解哪个外设相关寄存器即可,所以整体来说,我们需要关心的寄存器并不是很多,而且很多都是有共性的,我们只需要学习了其中一个的相关寄存器,其他个基本都是一样。
给大家举个简单的例子,我们知道寄存器的本质是一个特殊的内存,对于STM32 来说,以 GPIOB 的 ODR 寄存器为例,其寄存器地址为:0X40010C0C,所以我们对其赋值可以写成:
(*(unsigned int *))(0X40010C0C) = 0XFFFF;这样我们就完成了对 GPIOB->ODR 寄存器的赋值,0XFFFF表示GPIOB所有I/O口(16个I/O口)都输出高电平,0X40010C0C 就是一个寄存器的特殊地址。
5.2. 存储器映射
STM32是一个32位单片机,他可以访问(2^32 = 4GB)4GB以内的存储空间。在前面章节介绍过STM32F10xx 系统框图,如下图5.2-1.被控单元有FLASH,RAM,FSMC 和AHB 到APB 的桥(即片上外设),这些功能部件共同排列在一个4GB 的地址空间内。我们可以通过C语言来访问这些地址空间,从而操作相关外设(读/写)。数据字节以小端格式(小端模式)存放在存储器中,数据的高字节保存在内存的高地址中,而数据的低字节保存在内存的低地址中。

图5.2-1-STM32F1系列系统结构图
存储器本身是没有地址信息的,我们对存储器分配地址的过程就叫存储器映射。这个分配一般由芯片厂商做好了,ST将所有的存储器及外设资源都映射在一个4GB的地址空间上(8个块),从而可以通过访问对应的地址,访问具体的外设。其映射关系如图5.2-2所示:

图5.2-2 STM32存储器映射图
如果给存储器再分配一个地址就叫存储器重映射。
存储器重映射是将已经映射过的存储器再次映射的过程。它可以使同一物理存储单元映射多个不同的逻辑地址。在这个过程中,存储单元会被再分配一个地址,这样存储单元就有了两个地址,用户可以通过这两个地址来访问该存储单元。存储器重映射的目的是为了快速响应中断或者快速完成某个任务,可以将同一地址段映射到不同速度的两个存储块,然后将低速存储块中的代码段复制到高速存储块中,对低速存储块的访问将被重映射为对高速存储块的访问。这种技术通过改变中断向量映射关系,使得系统能够更高效地处理数据和任务。
存储器本身不具有地址信息,其地址是由芯片厂商或用户分配的,给存储器分配地址的过程就称为存储器映射。对于具体的某款嵌入式芯片,它包含的各种存储器的大小、地址分布都是确定的。存储器映射是对各种存储器的大小和地址分布的规划,而存储器重映射则是在此基础上进行的进一步操作。
存储器重映射是一种优化系统性能的技术手段,通过对存储器的重新映射,可以提高系统的响应速度和任务处理效率。
5.2.1 存储器区域功能划分
ST将4GB空间分成8个块,每个块512MB,如下图5.2-3所示,从图中我们可以看出有很多保留区域(Reserved),这是因为一般的芯片制造厂家是不可能把4GB空间用完的,同时,为了方便后续型号升级,会将一些空间预留(Reserved)。

图5.2-3 STM32 存储块功能及地址范围
在这8 个Block 里面,有3 个块非常重要,也是我们最关心的三个块。Block0 用来设计成内部FLASH,Block1 用来设计成内部RAM,Block2 用来设计成片上的外设,下面我们简单的介绍下这三个Block 里面的具体区域的功能划分。
5.2.2 存储器Block0 内部区域功能划分

图5.2-4 存储块0的功能划分
Block 0,用于存储代码,即FLASH空间,其功能划分如上图5.2-4所示。图示用户FLASH大小是512KB,这是属于大容量的STM32F103x,如STM32F103ZET6,其他型号,如32F103C8T6则远没有这么多。理论上ST也可以推出更大容量的STM32F103单片机,因为这里保留了一大块地址空间。STM32的出厂固化BootLoader非常精简,整个BootLoder只占了2KB FLASH空间。
BootLoader:嵌入式系统的BootLoader,也称为引导加载程序,是嵌入式系统在加电后执行的第一段代码。它负责在系统启动时初始化硬件设备,并将操作系统映像或固化的嵌入式应用程序装载到内存中,然后跳转到操作系统所在的空间,启动操作系统运行。BootLoader的主要功能包括初始化处理器和周边电路、建立内存空间映射图、加载操作系统映像或用户应用程序等,为最终调用操作系统内核或执行用户应用程序准备好正确的环境。
在嵌入式系统中,BootLoader的代码通常是由开发人员编写,并针对特定的硬件平台进行优化。它通常存储在系统的非易失性存储器中,如闪存或EEPROM,以确保在系统上电后能够被访问和执行。
总之,嵌入式系统的BootLoader是确保系统能够正常启动和运行的关键组件,它负责初始化硬件、加载操作系统或应用程序,并为系统的正常运行提供必要的环境。
5.2.3 储存器Block1 内部区域功能划分

图5.2-5 STM32 存储块1的功能划分
Block 1,用于存储数据,即SRAM空间,其功能划分如图5.2-5所示 ,图示为大容量产品,也仅用了64KB( 如STM32F103ZET6,STM32F103C8T6则只有20KB),用于SRAM访问,同时也有大量保留地址用于扩展。
5.2.4 储存器Block2 内部区域功能划分

图5.2-6 STM32 存储块2的功能划分
Block 2,用于外设访问,STM32内部大部分的外设都是放在这个块里面的,该存储块里面包括了AHB、APB1和APB2三个总线相关的外设,其中AHB和APB2是高速总线(72MHZ),APB1是低速总线(36MHZ)。其功能划分如图5.2-6所示. 同样可以看到,各个总线之间,都有预留地址空间,方便后续扩展。关于STM32各个外设具体挂在哪个总线上面,大家可以参考前面的 STM32F103系统结构图和STM32F103存储器映射图进行查找对应。
5.3.寄存器映射
给存储器分配地址的过程叫存储器映射,寄存器是一类特殊的存储器,它的每个位都有特定的功能,可以实现对外设/功能的控制,给寄存器的地址命名的过程就叫寄存器映射。
举例说明,我们的纸质笔记本就好比通用存储器,用来记录数据是完全没问题的,但是不会有具体的动作,只能做记录使用。而我们家中的电闸开关,就好比寄存器了,如下图家中电闸箱有8个熔断器控制着8处用电设备(相当于一个8位寄存器),这些熔断器开关也可以记录状态,同时还能让对应用电器开/关,是会产生具体动作的。同时我们也可以通过读取这些熔断器的状态了解一些用电器是否存在问题,比如某些熔断器一直处于断开的状态,可能是对应的用电器存在短路等问题。为了方便区分和使用,我们会给每个开关命名,如厨房开关、大厅开关、卧室开关等,给开关命名的过程,就是寄存器映射。

图5.3-1 寄存器作用举例(家中电闸开关)
STM32内部的寄存器有非常多,远远不止8个开关这么简单,但是原理是差不多的,每个寄存器的每一个位,一般都有特定的作用,涉及到寄存器描述,可以参考《STM32F10x参考手册》对应章节的寄存器描述部分,有详细的描述。
在存储器Block2 这块区域,设计的是片上外设,它们以四个字节为一个单元,共32bit,每一个单元对应不同的功能,当我们控制这些单元时就可以驱动外设工作。我们可以找到每个单元的起
始地址,然后通过C 语言指针的操作方式来访问这些单元,如果每次都是通过这种地址的方式来访问,不仅不好记忆还容易出错,这时我们可以根据每个单元功能的不同,以功能为名给这个内存单元取一个别名,这个别名就是我们经常说的寄存器,这个给已经分配好地址的有特定功能的内存单元取别名的过程就叫寄存器映射。
比如,我们找到GPIOB端口的输出数据寄存器ODR 的地址是0x40010C0C(这个地址如何找到的后面我们会讲),ODR 寄存器是32bit,低16bit 有效,对应着16 个外部IO,写0/1 对应的IO 则输出低/高电平。现在我们通过C 语言指针的操作方式,让GPIOB的16 个IO 都输出高电平:
// GPIOB 端口全部输出 高电平
*(unsigned int*)(0x40010C0C) = 0xFFFF;0x40010C0C 在我们看来是GPIOB 端口ODR 的地址,但是在编译器看来,这只是一个普通的变量,是一个立即数,要想让编译器也认为是指针,我们得进行强制类型转换,把它转换成指针,即(unsigned int *)0x4001 0C0C,然后再对这个指针进行* 操作。
通过绝对地址访问内存单元不好记忆且容易出错,我们可以通过寄存器别名的方式来操作,见代码如下代码: (其中GPIOB_BASE 指的是GPIOB 端口的基地址,稍后会讲)。
// GPIOB 端口全部输出 高电平
#define GPIOB_ODR (unsigned int *)(GPIOB_BASE+0x0C)
* GPIOB_ODR = 0xFF;为了方便操作,我们直接把指针操作“*”也定义到寄存器别名里面,具体见如下代码:
//GPIOB 端口全部输出 高电平
#define GPIOB_ODR *(unsigned int *)(GPIOB_BASE+0x0C)
GPIOB_ODR = 0xFF;5.3.1 STM32 的外设地址映射
5.3.1.1 寄存器地址计算
具体某个寄存器地址,由三个参数决定:
1、总线基地址(BUS_BASE_ADDR);
2,外设基于总线基地址的偏移量(PERIPH_OFFSET);
3,寄存器相对外设基地址的偏移量(REG_OFFSET)。
可以表示为:
寄存器地址 = BUS_BASE_ADDR + PERIPH_OFFSET + REG_OFFSET
5.3.1.2 总线基地址
片上外设区分为三条总线,根据外设速度的不同,不同总线挂载着不同的外设,APB1 挂载低速外设,APB2 和AHB 挂载高速外设。
相应总线的最低地址我们称为该总线的基地址(BUS_BASE_ADDR),总线基地址也是挂载在该总线上的首个外设的地址。其中APB1 总线的地址最低,片上外设从这里开始,也叫外设基地址。 如前面图5.2-6所示,提取见下图。

图5.3-2 外设总线基地址
“相对外设基地址偏移”即该总线地址与“片上外设”基地址0x4000 0000 的差值。
5.3.1.3 外设基地址
总线上挂载着各种外设,这些外设也有自己的地址范围,特定外设的首个地址称为“XX 外设基地址”,也叫XX 外设的边界地址。具体有关STM32F10xx 外设的边界地址请参考《STM32F10xx
参考手册》的存储器映射图。
这里面我们以GPIO 这个外设来讲解外设的基地址,GPIO 属于高速的外设,挂载到APB2 总线上,具体见图5.3-3。最后一列就是外设基于总线基地址的偏移量(PERIPH_OFFSET)。

图5.3-3 GPIO外设基地址
5.3.1.4 外设寄存器
在XX 外设的地址范围内,分布着的就是该外设的寄存器。以GPIO 外设为例,GPIO 是通用输入输出端口的简称,简单来说就是STM32 可控制的引脚,基本功能是控制引脚输出高电平或者低电平。最简单的应用就是把GPIO 的引脚连接到LED 灯的阴极,LED 灯的阳极接电源,然后通
过STM32 控制该引脚的电平,从而实现控制LED 灯的亮灭。
GPIO 有很多个寄存器,每一个都有特定的功能。每个寄存器为32bit,占四个字节,在该外设的基地址上按照顺序排列,寄存器的位置都以相对该外设基地址的偏移地址来描述。这里我们以
GPIOB 端口为例,来说明GPIO 都有哪些寄存器,具体见图5.3-4。图中的偏移量,就是寄存器基于外设基地址的偏移量(REG_OFFSET)。

图5.3-4 GPIOB 端口的寄存器地址列表
5.3.2 寄存器描述解读
这里以“GPIO 端口置位/复位寄存器”为例,教大家如何理解寄存器的说明,具体见图5.3-5.

图5.3-5 GPIO 端口置位/复位寄存器说明
① 寄存器名称
寄存器说明中首先列出了该寄存器中的名称,“(GPIOx_BSRR)(x=A⋯E)”这段的意思是该寄存器名为“GPIOx_BSRR”其中的“x”可以为A-E,也就是说这个寄存器说明适用于GPIOA、GPIOB至GPIOE,这些GPIO 端口都有这样的一个寄存器,一些低端的芯片可能没有这么多端口,一些高端的芯片也可能比这些端口要多,但意思都是一样的。
② 偏移地址
偏移地址是指本寄存器相对于这个外设的基地址的偏移。本寄存器的偏移地址是0x10,从参
考手册中我们可以查到GPIOA 外设的基地址为0x4001 0800 ,我们就可以算出GPIOA 的这个GPIOA_BSRR 寄存器的地址为:0x4001 0800+0x10 ;同理,由于GPIOB 的外设基地址为x4001
0C00,可算出GPIOB_BSRR 寄存器的地址为:0x4001 0C00+0x10 。其他GPIO 端口以此类推即
可。
③ 寄存器位表
紧接着的是本寄存器的位表,表中列出它的0-31 位的名称及权限。表上方的数字为位编号,中间为位名称,最下方为读写权限,其中w 表示只写,r 表示只读,rw 表示可读写。本寄存器中的
位权限都是w,所以只能写,如果读本寄存器,是无法保证读取到它真正内容的。而有的寄存器位只读,一般是用于表示STM32 外设的某种工作状态的,由STM32 硬件自动更改,程序通过读取那些寄存器位来判断外设的工作状态。
④ 位功能说明
位功能是寄存器说明中最重要的部分,它详细介绍了寄存器每一个位的功能。例如本寄存器中有两种寄存器位,分别为BRy 及BSy,其中的y 数值可以是0-15,这里的0-15 表示端口的引脚号,如BR0、BS0 用于控制GPIOx 的第0 个引脚,若x 表示GPIOA,那就是控制GPIOA 的第0 引脚,而BR1、BS1 就是控制GPIOA 第1 个引脚。
其中BRy 引脚的说明是“0:不会对相应的ODRy 位执行任何操作;1:对相应ODRy 位进行复
位”。这里的“复位”是将该位设置为0 的意思,而“置位”表示将该位设置为1;说明中的ODRy是另一个寄存器的寄存器位,我们只需要知道ODRy 位为1 的时候,对应的引脚y 输出高电平,为0 的时候对应的引脚输出低电平即可。所以,如果对BR0 写入“1”的话,那么GPIOx 的第0 个引脚就会输出“低电平”,但是对BR0 写入“0”的话,却不会影响ODR0 位,所以引脚电平不会改变。要想该引脚输出“高电平”,就需要对“BS0”位写入“1”,寄存器位BSy 与BRy 是相反的操作。
5.3.3 STM32库函数的寄存器映射实现
STM32F103所有寄存器映射都在stm32f103xe.h里面完成,包括各种基地址定义、结构体定义、外设寄存器映射、寄存器位定义等,整个文件有1W多行,非常庞大。我们没有必要对该文件进行全面分析,因为很多内容都是相似的,我们只需要知道寄存器是如何被映射的,就可以了。以上所有的关于存储器映射的内容,最终都是为大家更好地理解STM32库函数如何用C 语言控制读写外设寄存器做准备。下面是实现过程:
5.3.3.1 封装总线和外设基地址
在编程上为了方便理解和记忆,我们把总线基地址和外设基地址都以相应的宏定义起来,总线或者外设都以他们的名字作为宏名,具体见如下代码:
/* 外设基地址 */
#define PERIPH_BASE ((unsigned int)0x40000000)
/* 总线基地址 */
#define APB1PERIPH_BASE PERIPH_BASE
#define APB2PERIPH_BASE (PERIPH_BASE + 0x00010000)
#define AHBPERIPH_BASE (PERIPH_BASE + 0x00020000)
/* GPIO 外设基地址 */
#define GPIOA_BASE (APB2PERIPH_BASE + 0x0800)
#define GPIOB_BASE (APB2PERIPH_BASE + 0x0C00)
#define GPIOC_BASE (APB2PERIPH_BASE + 0x1000)
#define GPIOD_BASE (APB2PERIPH_BASE + 0x1400)
#define GPIOE_BASE (APB2PERIPH_BASE + 0x1800)
#define GPIOF_BASE (APB2PERIPH_BASE + 0x1C00)
#define GPIOG_BASE (APB2PERIPH_BASE + 0x2000)
/* 寄存器基地址,以 GPIOB 为例 */
#define GPIOB_CRL (GPIOB_BASE+0x00)
#define GPIOB_CRH (GPIOB_BASE+0x04)
#define GPIOB_IDR (GPIOB_BASE+0x08)
#define GPIOB_ODR (GPIOB_BASE+0x0C)
#define GPIOB_BSRR (GPIOB_BASE+0x10)
#define GPIOB_BRR (GPIOB_BASE+0x14)
#define GPIOB_LCKR (GPIOB_BASE+0x18)上述代码首先定义了“片上外设”基地址PERIPH_BASE,接着在PERIPH_BASE 上加入各个总线的地址偏移,得到APB1、APB2 总线的地址APB1PERIPH_BASE、APB2PERIPH_BASE,在其之上加入外设地址的偏移,得到GPIOA-G 的外设地址,最后在外设地址上加入各寄存器的地址偏移,得到特定寄存器的地址。一旦有了具体地址,就可以用指针读写,具体见代码:
/* 控制 GPIOB 引脚 0 输出低电平 (BSRR 寄存器的 BR0 置 1) */
*(unsigned int *)GPIOB_BSRR = 0x01<<16;
/* 控制 GPIOB 引脚 0 输出高电平 (BSRR 寄存器的 BS0 置 1) */
*(unsigned int *)GPIOB_BSRR = 0x01<<0;
unsigned int temp;
/* 读取 GPIOB 端口所有引脚的电平 (读 IDR 寄存器) */
temp = *(unsigned int *)GPIOB_IDR; 该代码使用(unsigned int *) 把GPIOB_BSRR 宏的数值强制转换成了地址,然后再用“*”号做取
指针操作,对该地址的赋值,从而实现了写寄存器的功能。同样,读寄存器也是用取指针操作,把寄存器中的数据取到变量里,从而获取STM32 外设的状态。
5.3.3.2 封装寄存器列表
用上面的方法去定义地址,还是稍显繁琐,例如GPIOA-GPIOE 都各有一组功能相同的寄存器,如GPIOA_ODR/GPIOB_ODR/GPIOC_ODR 等等,它们只是地址不一样,但却要为每个寄存器都定义它的地址。为了更方便地访问寄存器,我们引入C 语言中的结构体语法对寄存器进行封装,如下代码所示:
typedef unsigned int uint32_t; /* 无符号 32 位变量 */
typedef unsigned short int uint16_t; /* 无符号 16 位变量 */
/* GPIO 寄存器列表 */
typedef struct {
uint32_t CRL; /*GPIO 端口配置低寄存器 地址偏移: 0x00 */
uint32_t CRH; /*GPIO 端口配置高寄存器 地址偏移: 0x04 */
uint32_t IDR; /*GPIO 数据输入寄存器 地址偏移: 0x08 */
uint32_t ODR; /*GPIO 数据输出寄存器 地址偏移: 0x0C */
uint32_t BSRR; /*GPIO 位设置/清除寄存器 地址偏移: 0x10 */
uint32_t BRR; /*GPIO 端口位清除寄存器 地址偏移: 0x14 */
uint16_t LCKR; /*GPIO 端口配置锁定寄存器 地址偏移: 0x18 */
} GPIO_TypeDef;这段代码用typedef 关键字声明了名为GPIO_TypeDef 的结构体类型,结构体内有7个成员变量,变量名正好对应寄存器的名字。C 语言的语法规定,结构体内变量的存储空间是连续的,其中32位的变量占用4 个字节,16 位的变量占用2 个字节,具体见图5.3-6.GPIO_TypeDef 结构体成员的地址偏移。

5.3-6.GPIO_TypeDef 结构体成员的地址偏移
也就是说,我们定义的这个GPIO_TypeDef ,假如这个结构体的首地址为0x4001 0C00(这也是第一个成员变量CRL 的地址),那么结构体中第二个成员变量CRH 的地址即为0x4001 0C00 +0x04,加上的这个0x04,正是代表CRL 所占用的4 个字节地址的偏移量,其它成员变量相对于结构体首地址的偏移,在上述代码右侧注释已注明。
这样的地址偏移与STM32 GPIO 外设定义的寄存器地址偏移一一对应,只要给结构体设置好首地址,就能把结构体内成员的地址确定下来,然后就能以结构体的形式访问寄存器,具体见代码如下:
GPIO_TypeDef * GPIOx; //定义一个 GPIO_TypeDef 型结构体指针 GPIOx
GPIOx = GPIOB_BASE; //把指针地址设置为宏 GPIOB_BASE 地址
GPIOx->IDR = 0xFFFF;
GPIOx->ODR = 0xFFFF;
uint32_t temp;
temp = GPIOx->IDR; //读取 GPIOB_IDR 寄存器的值到变量 temp 中 这段代码先用 GPIO_TypeDef 类型定义一个结构体指针 GPIOx,并让指针指向地址GPIOB_BASE(0x4001 0C00),地址确定下来,然后根据C 语言访问结构体的语法,用GPIOx->ODR 及GPIOx->IDR 等方式读写寄存器。
最后,我们更进一步,直接使用宏定义好GPIO_TypeDef 类型的指针,而且指针指向各个GPIO端口的首地址,使用时我们直接用该宏访问寄存器即可,具体代码:
/* 使用 GPIO_TypeDef 把地址强制转换成指针 */
#define GPIOA ((GPIO_TypeDef *) GPIOA_BASE)
#define GPIOB ((GPIO_TypeDef *) GPIOB_BASE)
#define GPIOC ((GPIO_TypeDef *) GPIOC_BASE)
#define GPIOD ((GPIO_TypeDef *) GPIOD_BASE)
#define GPIOE ((GPIO_TypeDef *) GPIOE_BASE)
#define GPIOF ((GPIO_TypeDef *) GPIOF_BASE)
#define GPIOG ((GPIO_TypeDef *) GPIOG_BASE)
#define GPIOH ((GPIO_TypeDef *) GPIOH_BASE)
/* 使用定义好的宏直接访问 */
/* 访问 GPIOB 端口的寄存器 */
GPIOB->BSRR = 0xFFFF; //通过指针访问并修改 GPIOB_BSRR 寄存器
GPIOB->CRL = 0xFFFF; //修改 GPIOB_CRL 寄存器
GPIOB->ODR =0xFFFF; //修改 GPIOB_ODR 寄存器
uint32_t temp;
temp = GPIOB->IDR; //读取 GPIOB_IDR 寄存器的值到变量 temp 中
/* 访问 GPIOA 端口的寄存器 */
GPIOA->BSRR = 0xFFFF;
GPIOA->CRL = 0xFFFF;
GPIOA->ODR =0xFFFF;
uint32_t temp;
temp = GPIOA->IDR; //读取 GPIOA_IDR 寄存器的值到变量 temp 中 这里我们仅是以GPIO 这个外设为例,给大家讲解了C 语言对寄存器的封装。以此类推,其他外设也同样可以用这种方法来封装。好消息是,这部分工作都由固件库帮我们完成了,这里我们只
是分析了下这个封装的过程,让大家知其然,也知道其所以然。
第6章.STM32开发环境介绍
6.1.STM32的常用开发环境
STM32开发常见的开发环境如图6.1-1所示,按照普及率进行了排名,用的最多的就是Keil公司的MDK,下面分别进行介绍。

图6.1-1 STM32的常用开发环境
6.1.1 MDK

图6.1-2 MDK软件
STM32的开发环境MDK(也称为MDK-ARM Version 5或MDK-ARM)是由德国Keil公司(现已并入ARM公司)开发的一款针对ARM Cortex-M系列微控制器的完整软件开发环境。界面美观,简单易用,是 STM32 最常用的集成开发环境。它为嵌入式软件开发者提供了从项目创建、代码编写、编译链接、仿真调试到最终程序烧录的一整套解决方案。在ST(意法半导体)开发环境中,MDK常被用于各种基于ARM Cortex-M内核的MCU(微控制器)的程序开发。
MDK与Keil的关系在于,MDK是Keil公司的一个集成开发环境(IDE),专门针对ARM公司的微控制器进行软件开发。Keil公司开发的基于μVision IDE,支持绝大部分8051内核的微控制器开发工具。而MDK-ARM则是ARM公司目前最新推出的针对各种嵌入式处理器的软件开发工具,它集成了业内最领先的技术,包括μVision集成开发环境与RealView编译器。
在开发过程中,使用MDK可以方便地进行项目创建、代码编写、编译链接和仿真调试等操作。MDK的设备数据库中有很多厂商的芯片,是专为微控制器开发的工具,支持ARM7、ARM9、Cortex-M4/M3/M1、Cortex-R0/R3/R4等ARM微控制器内核。这使得STM32的开发者能够轻松地进行嵌入式软件的开发和调试。
6.1.2 STM32CubeIDE

图6.1-3 STM32CubeIDE
STM32CubeIDE是ST于2019年新推出的一款多功能的集成开发工具,它集成了TrueSTUDIO和STM32CubeMX插件,并基于GDB进行调试,它允许集成数百个现有插件,这些插件完成Eclipse的功能。
TrueSTUDIO插件是一款建立在EclipseCDT、GCC和GDB的C/C++集成开发工具,其具有项目创建和管理、代码编辑、代码编译以及代码在线调试等功能。
STM32CubeMX插件具有图形化配置功能,可以直观地选择MCU/MPU型号、动态配置引脚和设置时钟树、动态设置外围设备和中间器件的模式,可以自动处理引脚冲突和生成初始化代码。
TrueSTUDIO和STM32CubeMX的强强联手,使STM32CubeIDE得以和MDK进行媲美。STM32CubeIDE完全开源免费,并且跨平台,目前支持Windows、Linux和macOS多个操作系统。但是STM32CubeIDE只是ST公司芯片的开发环境,MDK所支持的芯片就要广的多了。
6.1.3 EWARM

图6.1-4 IAR EWARM
EWARM,全称为IAR Embedded Workbench for ARM(IAR EWARM),是由IAR Systems公司开发的一款集成开发环境(IDE),专为ARM架构的微控制器设计。它提供了一个综合性的开发环境,用于编译、调试和优化基于ARM架构的嵌入式应用程序,适用于STM32等ARM Cortex-M系列微控制器的开发。
IAR EWARM的主要特点包括:
- 强大的编译器:EWARM配备了一款高效而稳定的C/C++编译器,能够生成高度优化的机器语言代码。这种编译器具有出色的代码大小和执行速度优化能力,保证了嵌入式应用程序的高效运行。
- 综合性的开发环境:EWARM提供了一个集成的开发环境,包括源代码编辑器、项目管理工具、构建系统和调试器等。开发人员可以在一个界面中完成代码编写、构建、调试等开发任务,简化了开发流程,提高了开发效率。
- 广泛的芯片支持:EWARM支持多个芯片系列,包括Arm Cortex-M、Arm Cortex-R和Arm Cortex-A等。这使得开发人员可以根据项目需求选择适合的芯片,并使用EWARM进行开发。
- 入门容易、使用方便:EWARM具有友好的用户界面和直观的操作方式,使得初学者可以快速上手。同时,它还提供了丰富的文档和示例代码,帮助开发人员更好地理解和使用EWARM。
- 代码紧凑:EWARM生成的代码紧凑,占用的内存空间较小,这对于资源有限的嵌入式系统来说非常重要。
此外,IAR EWARM还包含一个全软件的模拟程序(simulator),用户不需要任何硬件支持就可以模拟各种ARM内核、外部设备甚至中断的软件运行环境。从中可以了解和评估IAR EWARM的功能和使用方法。对比 MDK,IAR的使用人数少一些。
6.1.4 几种开发环境的比较
在众多IDE里,以前MDK和IAR的用户是比较多的,现在感觉使用STM32CubeIDE的已经超过IAR。很多人一开始学习单片机的时候使用的是MDK或者IAR来开发,这两个IED使用起来简单、好用并且普及很广。例如MDK,其开发界面美观,不需要做很麻烦的配置就可以进行开发,编译速度快,并且具有一键下载功能,可以说是比较方便的,对初学者来说比较友好。不过,MDK是一款付费集成开发环境,如果要商用,需要联系Keil公司购买,而免费版或评估版要么有器件型号限制,要么有程序容量限制。
使用MDK进行开发,易于上手,操作简单,如果之前有接触MDK的人,可以更快上手STM32MCU开发。但MDK没有没有图形化配置界面,也没有自动生成初始化代码的功能,需要自己手动去实现,不过这有助于加深学习者对底层操作过程的理解。
使用STM32CubeIDE进行开发,可以借助STM32CubeMX插件的图形化配置功能进行配置,操作直观,可以自动生成初始化代码。STM32CubeMX插件把很多东西封装的比较好,就是因为封装的比较好,所以我们可以直接跳过对部分底层的操作,不过这不利于对底层的理解。当然,我们也可以不使用STM32CubeMX插件的图形化配置功能和初始化代码生成功能,可以直接使用TrueSTUDIO插件的功能,这个时候可以在STM32CubeIDE上导入已有的TrueSTUDIO工程来进行开发也是可以的,使用上就和TrueSTUDIO、MDK差不多。STM32CubeMX插件的图形界面操作加上TrueSTUDIO插件的ECLIPSE/CDT框架,使得STM32CubeIDE的配置过程比MDK要麻烦,而且没有一键下载功能,使用上会让人觉得有一种―慢的感觉,比起MDK,STM32CubeIDE有点慢、卡顿。
6.2. MDK安装
MDK的安装可参考如下视频:
MDK5 的安装分为两步:1,安装 MDK5;2,安装器件支持包。
6.2.1 安装MDK5
MDK5 的安装比较简单,需要提醒一下在选择安装路径的时候,建议大家将 Pack 的路径和 Core 的路径放在一个盘中。安装目录及路径不要有任何中文汉字在里面,最好电脑系统名和用户名,都不要有任何中文。
6.2.2 安装器件支持包
器件支持包可以选择离线和在线安装方式,具体请参考前面视频链接。
需要注意的是MDK 是一款付费集成开发环境,默认软件是试用版的,只能编译不超过32K的代码,我们作为学习者仅做学习使用,可以使用注册工具注册,参考上述视频。如果大家要商用,要从Keil 公司购买!
6.3.安装STLINK驱动
STM32 可以通过 DAP、STLINK、JLINK 等仿真调试器进行程序下载和仿真,我们使用的是STLINK,STLINK的驱动可以直接在我们Keil软件的安装目录里就可以找到,如下图。

图6.3-1 STLINK驱动安装
6.4.安装USB转串口驱动
安装 CH340USB 虚拟串口驱动,以便我们使用电脑通过 USB 和 STM32 进行串口通信。这个网上下载资源很多,这里就不赘述了。
第7章.嵌入式开发常见概念简介
本文介绍一些在嵌入式开发中常见的概念,比如API,硬件抽象,库函数等,会不断进行补充。

7.1.API,Handle(句柄)
7.1.1 API:
在嵌入式开发中,API(Application Programming Interface,应用程序编程接口)是一组定义、协议和工具的集合,它允许不同的软件组件相互交互。API为开发人员提供了一种标准化的方式,来访问特定功能或数据,而无需了解底层实现的细节。
可以理解为是一些已经封装好了的可以被调用的功能函数或者方法,我们把这些函数放到我们的工程中,当我们要实现某个功能时,就可以在工程中找到对应的函数,然后进行调用。
7.1.2 Handle(句柄):

Handle按英文的翻译就是“把手”,“抓手”,就像上图中的门把手,我们一旦抓到这个Handle“门把手”,那么我们就可以对这个房间进行一些操作,比如进入房间,知道里面放了什么,或者可以进去取一些东西之类的。在软件开发里,Handle的意思和前面的比喻是一样的,你只要获取了某个“东西”的句柄Handle(把手),那么你就可以对这个“东西”进行一些操作。
说的正式一些就是:在软件开发中,Handle(句柄)是一种特殊类型的标识符,它用来唯一地标识和引用系统内某个资源或对象。Handle在软件开发中起到了一个桥梁的作用,使得开发人员能够间接地访问和控制底层资源,从而提高了代码的灵活性和可维护性。
在STM32 的手册上经常看到这个词,可以理解为它是一个指针,或者是一些表的索引,或者是用于描述和标记某些资源的的标识,这些资源可以是函数、可以是一段内存、可以是一组数字、可以是一个外设等等,总之很广泛,通过句柄我们可以访问到打开的资源。我们在调用 API 函数的时候,可以利用句柄来说明要操作哪些资源。
7.2.CMSIS标准,HAL(硬件抽象层)
7.2.1 CMSIS标准
CMSIS(Cortex Microcontroller SoftwareInterface Standard)标准的建立主要是为了解决不同芯片厂商生产的Cortex微控制器软件兼容性问题。基于Cortex系列芯片采用的内核都是相同的,区别主要为核外的片上外设的差异,这些差异却导致软件在同内核,不同外设的芯片上移植困难。为了解决这个问题,ARM与芯片厂商建立了CMSIS标准。CMSIS标准的建立为基于Cortex核的嵌入式系统开发带来了诸多便利和优势,使得开发人员可以更加高效、快速地开发出高质量的产品。
CMSIS 标准,实际是新建了一个软件抽象层。见图7-1.CMSIS 架构。

图7-1.CMSIS架构
CMSIS标准中最主要的为CMSIS核心层,它包括了:
•内核函数层:其中包含用于访问内核寄存器的名称、地址定义,主要由ARM公司提供。
•设备外设访问层:提供了片上的核外外设的地址和中断定义,主要由芯片生产商提供。
可见CMSIS层位于硬件层与操作系统或用户层之间,提供了与芯片生产商无关的硬件抽象层,可以为接口外设、实时操作系统提供简单的处理器软件接口,屏蔽了硬件差异,这对软件的移植是有极大的好处的。
CMSIS标准的优势主要体现在以下几个方面:
- 降低学习曲线和开发成本:CMSIS提供了统一的软件接口和标准,使得开发人员可以更容易地学习和使用不同芯片厂商的Cortex微控制器。这降低了学习成本,提高了开发效率。
- 提高软件的可移植性和可重用性:通过遵循CMSIS标准,开发人员可以编写出在不同芯片上都能运行的代码,提高了软件的可移植性。同时,CMSIS提供的标准接口也使得软件模块的重用成为可能,进一步降低了开发成本。
- 缩短上市时间:CMSIS标准的采用可以加速新微控制器的部署和上市过程。由于CMSIS提供了与芯片生产商无关的硬件抽象层,开发人员可以更快地开发出符合市场需求的产品。
- 支持多种编译器:CMSIS独立于编译器,因此它支持主流编译器。这使得开发人员可以根据自己的喜好和需要选择适合的编译器进行开发。
- 增强程序调试:CMSIS提供了用于调试连接、调试外设视图、软件交付和设备支持的接口,以及通过调试器的外围信息和用于printf样式输出的ITM通道来增强程序调试。这使得开发人员可以更方便地进行程序调试和错误排查。
- 实现快速软件交付和简化更新:CMSIS以CMSIS-Pack格式交付,可以实现快速软件交付、简化更新,并与开发工具实现一致集成。这使得开发人员可以更方便地管理和更新他们的软件项目。
- 简化系统资源和分区:CMSIS-Zone将简化系统资源和分区,因为它管理多个处理器、内存区域和外围设备的配置。这使得开发人员可以更有效地管理系统资源,提高系统的整体性能。
7.2.2 HAL(硬件抽象层):
在嵌入式开发中,“硬件抽象层”(Hardware Abstraction Layer,简称HAL)是一个关键的概念,它主要用于隐藏底层硬件的细节,为上层软件提供统一的接口。硬件抽象层是嵌入式系统开发中的重要组成部分,它为上层软件提供了统一的、标准化的接口,并隐藏了底层硬件的细节。通过合理地设计和实现硬件抽象层,可以极大地提高嵌入式系统的开发效率和产品质量。
以下是关于硬件抽象层(HAL)的详细介绍:
- 定义与功能:
- 硬件抽象层是一种软件层,其主要目的是将硬件差别与操作系统的其他层相隔离。它通过将不同硬件平台的功能和特性抽象出来,为上层软件提供一个统一的、标准化的接口。
- 通过硬件抽象层,相同的代码可以在不同的硬件平台上运行,而无需进行大量的修改。这极大地提高了代码的可复用性和可移植性。
- 当需要对系统进行修改或添加新的功能时,可以通过修改或添加硬件抽象层来实现,而无需对整个系统进行大规模的修改。这降低了开发难度和成本。
- 优势:
- 硬件抽象层在嵌入式系统开发中扮演着至关重要的角色。它简化了软件开发的复杂性,降低了开发难度和成本,并提高了代码的可复用性和可移植性。
- 通过硬件抽象层,开发者可以更加专注于实现应用层逻辑,而无需深入了解底层硬件的细节。这有助于加速开发进程并提高产品质量。
- 随着硬件技术的不断发展,新的硬件功能不断涌现。通过设计可扩展的硬件抽象层,可以方便地添加新的硬件支持和功能,从而满足不断变化的市场需求。
7.3.BSP和库函数
7.3.1 BSP(板级支持包):
BSP(Board Support Package,板级支持包)是指针对特定硬件平台的软件支持包。它位于主板硬件和操作系统(或裸机系统)之间,提供了一组软件接口和驱动程序,用于实现对底层硬件设备的抽象和管理,使上层应用程序能够更加方便、高效地访问和控制硬件资源。
它是针对特定硬件平台(例如某款开发板或特定的嵌入式系统)的软件支持包。BSP的作用是提供一系列软件组件,帮助开发者在特定硬件平台上进行软件开发。这些组件包括了对硬件的初始化、配置以及访问硬件的接口,以确保软件能够正确地运行在目标硬件上。
BSP通常包括以下内容:
-
引脚配置:包括各功能引脚的初始化设置,比如串口、I2C、SPI等接口的引脚配置。
-
中断配置:处理器中断控制器的初始化设置,确保中断能够正常工作。
-
时钟配置:处理器和外设的时钟配置,确保系统时钟和外设时钟能够正常运行。
-
外设驱动:对于特定的开发板,可能包含对应外设的驱动程序,比如液晶显示屏驱动、触摸屏驱动等。
-
其他硬件初始化:例如初始化LED、按键、传感器等外部硬件设备。
7.3.2 库函数
库函数在嵌入式领域中也经常被称为固件库(Firmware Library)。固件库的作用是为特定的微控制器MCU或处理器MPU提供高级别的函数接口,以简化对硬件的访问和控制,并且为开发者提供更加便捷的软件开发和调试环境。在不同的硬件和开发工具厂商中,固件库也可能被称为不同的名字,比如标准外设库、处理器支持库等等。
STM32的库函数是为ST公司生产的STM32系列微控制器而设计的一组函数库。这些库函数旨在简化对STM32微控制器的编程和开发,提供了对处理器内部功能和外设的高级抽象,使得开发者可以更容易地与STM32系列微控制器进行交互和控制。
STM32的库函数主要包括标准外设库(Standard Peripheral Library,SPL)和STM32Cube库(HAL库和LL库)两种形式。标准外设库提供了对处理器内部外设(比如定时器、串口、I2C、SPI等)的底层驱动函数,而STM32Cube库则提供了一套更加高级、现代化的API,包含了对各种传感器、通信接口和外设的驱动函数,并提供了更加丰富和易用的功能。
通过使用STM32的库函数,开发者可以更便捷地进行嵌入式软件开发,加快产品上市速度,并且为不同型号的STM32微控制器的开发提供了一定的通用性。
7.3.3 BSP和库函数的区别
以STM32开发为例,BSP和库函数这2个概念经常容易混淆,下面是我个人对这2个概念的理解。
BSP是针对特定的开发板或硬件平台的(比如我们STM32的MCU做了个控制板),它包含了特定硬件的初始化和配置信息,因此具有一定的特殊性。而库函数则是针对某款MCU(微控制器单元)的,提供了对处理器内部功能的封装,具有普遍性,可以适用于多种硬件平台,比如STM32F103C8T6这个MCU的库函数,不管是谁设计控制板都可以使用且是一样的。在实际开发过程中,BSP和库函数通常配合使用,BSP用于配置和初始化特定硬件平台,而库函数则用于提供通用的MCU或MPU处理器功能和外设控制。
7.4 应用层软件,中间层软件,底层软件
以我自己的认识来看,这3个概念似乎只有应用层软件是比较固定的,而中间层和底层的定义在不同的环境中可能具有不同的含义,很难给出统一的解释,在不同人和不同场景下,中间层和底层的一些内容可能会有重叠,但一般而言下面这张关系图都是成立的。

以STM32开发为例,应用层软件、中间层软件和底层软件具体含义和内容:
- 应用层软件:
- 含义:应用层软件是STM32微控制器上运行的最终功能程序,它直接满足用户需求或完成特定的功能任务。
- 内容:应用层软件包括用户界面、通信协议、数据处理算法等。例如,如果你正在开发一个基于STM32的温度控制系统,应用层软件可能包括温度数据的读取、处理、显示以及与上位机的通信功能。
- 中间层软件(硬件抽象层HAL或板级支持包BSP):
- 含义:中间层软件是连接应用层软件和底层硬件的桥梁,它隐藏了底层硬件的复杂性,为应用层软件提供了一组统一的接口。
- 内容:在STM32开发中,中间层软件通常包括STM32的HAL库(硬件抽象层库)或特定的BSP(板级支持包)。HAL库提供了一组高级API,用于访问STM32微控制器的硬件资源,如GPIO、UART、SPI等。BSP则针对特定的STM32开发板提供了初始化代码、驱动程序等。这些库和包使得开发者能够以一种统一、标准化的方式访问底层硬件,而不必深入了解底层寄存器和位操作。
- 底层软件:
- 含义:底层软件直接与STM32微控制器的硬件交互,负责完成硬件的初始化、驱动程序的加载以及硬件资源的直接控制。
- 内容:底层软件通常包括与STM32微控制器直接相关的代码,如启动文件(Startup Files)、链接脚本(Linker Scripts)、中断服务程序(Interrupt Service Routines, ISRs)以及硬件的初始化代码。这些代码负责设置微控制器的时钟、内存、外设等,为中间层和应用层软件提供一个稳定、可靠的硬件环境。
第8章.STM32开发方式(库函数)介绍
8.1 单片机的开发方式

图8.1-1 单片机开发方式
如图8.1-1,单片机开发常见的开发方式有两种:直接操作寄存器和使用库函数。我们在51单片机开发的时候就直接配置寄存器,但是到了32位单片机开发,如果开发大型项目,需要的功能外设很多,再使用这种方式就已经力不从心了。因为 STM32 的外设资源丰富,寄存器数量是51单片机寄存器的数十倍,那么多的寄存器根本无法记忆,而且开发中需要不停查找芯片手册,开发过程就显得机械和费力,完成的程序代码可读性差,可移植性不高,程序的维护成本变高了。当然了,采用直接配置寄存器方式开发会显得更直观,程序运行占用资源少。 下面将这两种方式的优缺点总结一下:

图8.1-2 两种开发方式的优缺点
8.1.1 直接操作寄存器
优点:
- 性能高:直接操作寄存器可以绕过库函数的调用和转换,直接对硬件进行操作,因此执行效率更高。
- 灵活性高:直接操作寄存器可以实现对硬件的底层控制,能够灵活地根据具体需求进行配置和操作。
- 深入理解硬件:通过直接操作寄存器,可以更深入地理解硬件的工作原理和内部机制,有助于提升个人的开发能力和经验。
缺点:
- 学习成本高:直接操作寄存器需要对硬件的底层结构和工作原理有较深的理解,对于初学者来说学习成本较高。
- 开发效率低:直接操作寄存器需要编写大量的底层代码,包括寄存器的配置、读写等,这会增加开发的工作量,降低开发效率。
- 可移植性差:直接操作寄存器是针对特定硬件的,当更换硬件或平台时,需要重写大量的底层代码,可移植性较差。
8.1.2 使用库函数
优点:
- 易于学习和使用:库函数提供了对硬件操作的封装,使得开发者无需深入了解硬件的底层细节,即可进行开发。这降低了学习成本,提高了开发效率。
- 可移植性好:库函数通常是跨平台的,可以在不同的硬件和操作系统上运行。因此,使用库函数开发的程序具有较好的可移植性。
- 较好的兼容性:库函数经过了严格的测试和验证,通常具有较好的兼容性和稳定性。
缺点:
- 性能较低:由于库函数需要进行封装和调用,相对于直接操作寄存器来说,执行效率可能会稍低一些。但在大多数情况下,这种性能差异是可以接受的。
- 灵活性受限:使用库函数进行开发时,可能会受到库函数功能的限制。如果库函数没有提供所需的功能,或者功能不满足具体需求,那么就需要进行底层开发或寻找其他解决方案。
- 依赖性强:使用库函数开发的程序通常依赖于特定的库文件或环境。如果更换库文件或环境,可能会导致程序无法正常运行或需要重新编译。因此,在使用库函数进行开发时,需要注意库文件的版本和兼容性等问题。
目前现在大型项目开发里,肯定是推荐库函数方式。现在项目开发最重要的是“方便人”,方便产品的合作开发,而不再是“方便计算机”,封装越好越利于项目的开发,虽然封装越好运行速度越慢,但目前这个缺点可以忽略。我们平常开发时,有同事经常会说,计算机你就把它当成“一头驴”,不要管它累不累,我们自己不累才是现代项目该有的特征。
虽然直接操作寄存器这种方式可以使我们更深入地理解硬件的工作原理和内部机制,有助于提升个人的开发能力,但STM32的学习过程却完全没必要按直接操作寄存器的方式去学习或者开发,我们只需要明白原理即可,了解了一种寄存器,其余寄存器操作方式也都是一样的。我们没必要在这上面耗费青春。
8.2 STM32的库函数

图8.2-1 STM32的库函数
为了简化开发人员的工作,减少开发工作时间和成本,针对STM32系列芯片,ST公司推出了标准外设库(STD库)、HAL库和LL库。在这些库中,有很多用结构体封装好的寄存器参数,有常用的表示参数的宏,还有封装好的对寄存器操作的API,开发者可以调用这些资源实现配置相应的寄存器,效率大大提高了。使用库的框架来开发,程序控制语句结构化,程序单元模块化,贴近人的思维,易于阅读,易于移植和维护。下面介绍一下3种库函数的区别。

图8.2-2 STM32各产品的库函数支持情况
8.2.1 标准外设库(STD库)
STD(StandardPeripheralLibraries)标准外设库,它把实现功能中需要配置的寄存器以结构体的形式封装起来,使用者只需要配置结构体变量成员就可以修改外设的配置寄存器,比直接操作寄存器方便了不少。但标准外设库仍然接近于寄存器操作,它的方便也是针对某一系列芯片而言,在不同系列芯片上使用标准外设库开发的程序可移植性比较差,例如,在F4上开发的程序移植到F3上,使用标准库是不通用的。目前STM32系列产品中仅F0-F4以及L1系列支持标准外设库。目前,对于较新的STM32系列,如STM32F7、STM32L4等,ST公司已经停止提供STD库的支持。这些新系列的MCU产品主要使用HAL库和LL库进行开发。
8.2.2 HAL库
为了解决标准库存在的问题,ST公司在标准库的基础上又推出了 HAL 库。这几年ST公司大力推广HAL 库,而且在ST新出的STM32 芯片中, ST直接只提供 HAL 库。HAL库取代之前的标准库已经是确定的趋势,HAL库也更符合现代项目的开发方式。
HAL库在设计的时候更注重软硬件分离,HAL库的目的就是尽量抽离物理层,HAL库的API集中关注各个外设的公共函数功能,以便定义通用性更好的API函数接口,具有更好的可移植性。HAL库写的代码在不同的STM32产品上移植,非常方便,效率得到提升。目前HAL库支持STM32全系列微控制器,具有良好的跨平台支持。
8.2.3 LL库
- LL库(Low-Level Library)是STMicroelectronics在HAL库的基础上提供的更低级别的库。
- 它提供了对底层寄存器和外设的更直接的访问,允许开发者编写更底层的代码,实现对微控制器和外设的精细控制。
- LL库保留了更多的硬件细节,为开发人员提供了更高级别的灵活性和控制。
- 相对于HAL库,LL库的执行效率可能更高,但使用难度也相应增加。
- LL库适用于对性能和资源要求极高,以及对底层硬件控制有特殊需求的应用。
LL库是ST在HAL库的基础上提供的更低级别的库,是继HAL库之后新增的库,与HAL库捆绑发布。LL库也更接近硬件层,它和STD库类似,都是直接操作的寄存器,只不过LL库可以在STM32Cube中实现。LL库提供一组轻量级、优化、面向专家的API,具有最佳的性能和运行时效率。LL库可以完全独立使用,也可以结合HAL库一起使用。当HAL库需要优化运行时,可以调用LL库来处理,例如对于一些复杂的外设(如USB驱动),两者混合使用才能正常驱动这个复杂的外设。
我们本教程的目的是学习,为了对硬件和原理有更深入的理解,很明显采用STD库是更好的一种学习方式。我们的学习也基于标准库开展。
第9章.Keil5-MDK软件简介
9.1 主界面

图9.1-1 Keil5主界面
本节我们简单介绍一下Keil5软件的界面及一些常用操作。后面创建例程的时候,我们还会详细讲解操作步骤。图9.1-1为KEIL5 的主窗口界面.分为了一下几个部分:
菜单栏:包含File文件、Edit编辑、View视图、Project工程、Help帮助等
工具栏:常见工具的快捷按钮,下面会重点介绍一些常用的工具
工程窗口:主要显示项目内容,文件组、源文件和头文件等
编辑窗口:编写代码的地方
消息窗口:反馈编译信息、烧录信息等
状态栏:光标的行列位置、字符编码、键盘NUM锁定等一些状态信息
工具栏里有几类常用的按钮是我们经常要用到的,如图9.1-2.

图9.1-2 工具栏常用按钮
① 编译类快捷按钮:对代码进行编译下载
| 按钮英文名称 | 中文含义 | 快捷键 |
| Translate | 编译当前文件 | Ctrl + F7 |
| Build | 编译工程目标 | F7 |
| Rebuild | 重新编译所有目标文件 | – |
| Batch Build | 分批编译(多工程) | – |
| Stop Build | 停止编译(正在编译时有效) – | – |
| Download | 下载程序 | F8 |
② 工程目标选项又称魔术棒:即对工程目标的配置,如芯片设备选择、C/C++ 选项、仿真配
置等等
③ 调试类按钮:
| 英文名称 | 中文描述 | 快捷键 |
| Start/Stop Debug Session | 打开/关闭调试 | Ctrl + F5 |
| Insert/Remove Breakpoint | 插入/移除断点 | F9 |
| Enable/Disable Breakpoint | 使能/失能断点 | Ctrl + F9 |
| Disable All Breakpoints | 失能所有断点 | – |
| Kill All Breakpoints | 取消所有断点 | Ctrl + Shift + F9 |
9.2 文本格式编辑
文本格式编辑,主要是设置一些关键字、注释、数字等的颜色和字体。如果刚装Keil5,没
进行字体颜色配置,我们的界面效果如图9.2-1所示,看上去不是特别舒服。

图9.2-1 Keil5默认文本效果
我们可以在软件中对字体颜色大小等进行自定义。我们可以在工具条上点击“扳手”按钮,如下图位置。

弹出的编辑对话框,如图9.2-2所示:
Editor选项卡中:

图9.2-2 配置对话框中Editor选项卡
①设置代码的编码格式:可以选择Chinese GB2312(Simplified)或UTF-8,如果打开别人的例程出现中文乱码,可以尝试修改这个Encoding格式。
②设置 C/C++文件,TAB 键的大小为 4 个字符 。
Colors & Fonts 选项卡:

图9.2-3 配置对话框中Colors&Fonts 选项卡
Colors&Fonts选项卡,在该选项卡内,我们就可以设置自己的代码的字体和颜色了。由于我们使用的是C语言,故在Window下面选择:C/C++EditorFiles在右边就可以看到相应的元素了,如图9.2-3。点击各个元素(Element)修改为你喜欢的颜色,也可以在Font栏设置你字体的类型(这个软件支持的字体类型实在是少的可怜,这里面没有一个我喜欢的字体),以及字体的大小等。字体大小,也可以直接按住ctrl+鼠标滚轮,进行放大或者缩小.
User Keywords选项卡

图9.2-4 配置对话框中User Keywords选项卡
点击 User Keywords 选项卡,设置用户定义关键字,以便用户自定义关键字也显示对应的颜色(对应图 9.2-3中的 User Keyword/Lable )。在 User Keywords 选项卡对话框输入你自己定义的关键字,如图 9.2-4示。如我们设置了 uint8_t、uint16_t 和 uint32_t 等三个用户自定义关键字,相当于 unsigned char、unsigned short 和 unsigned int。如果你还有其他自定义关键字,在这里添加即可。设置成之后点击OK,就可以在主界面看到你所修改后的结果。
9.3 代码提示&语法检测&代码模版
Text Completion选项卡:

图9.3-1 配置对话框中Text Completion选项卡
配置对话框,选择 Text Completion选项卡,如图9.3-1,有3个地方是对我们比较有帮助的。
①代码提示:
上图中的“ShowCodeCompletionListFor”标签中有4个选项:
Strut/ClassMembers:用于开启结构体/类成员提示功能。
FunctionParameters:用于开启函数参数提示功能。
Symbolsafterxxcharacters:用于开启代码提示功能,即在输入多少个字符以后,提示匹配的内容(比如函数名字、结构体名字、变量名字等),这里默认设置3个字符以后,就开始提示。如图9.3-2.
ENTER/TAB as fill-up character:使用回车和 TAB 键填充字符。
 图9.3-2 代码提示
图9.3-2 代码提示
②动态语法检测:
“Dynamic Syntax Checking”则用于开启动态语法检测,比如编写的代码存在语法错误的时,会在对应行前面出现X图标,如出现警告,则会出现![]() 图标,将鼠标光标放图标上面,则会提示产生的错误/警告的原因,如图 9.3-3 所示:
图标,将鼠标光标放图标上面,则会提示产生的错误/警告的原因,如图 9.3-3 所示:

图9.3-3 动态语法检测
③代码模版:
图9.3-1中的③和④为代码模版,其中③是一段代码的名字,④是这个名字对应的具体代码,然后在主界面的工程窗口中,选择“Template”选项卡,双击“代码名”,便可以将③中代码名字对应的一段代码插入当前代码编辑区光标所在位置中,还是非常方便的,如图9.3-4.

9.3-4 代码模版
9.4 其他小技巧
9.4.1 TAB 键的使用
首先要介绍的就是TAB键的使用,除了按下Tab键可以让光标及后面的代码右移指定的空格(就是我们前面设定的Tab键代表的空格位数),MDK的TAB键还支持块操作。也就是可以让选中一片代码整体右移固定的几个位,也可以通过SHIFT+TAB键整体左移固定的几个位。

图9.4-1 Tab键的使用
9.4.2 快速定位函数/变量被定义的地方
在调试代码或编写代码的时候,我们肯定有时需要看看某个函数是在那里定义的,具体里面的内容是怎么样的,也可能想看看某个变量或数组是在哪个地方定义的等。尤其在调试代码或者看别人代码的时候,如果编译器没有快速定位的功能的时候,那我们只能慢慢的自己找,代码量少的时候还好说,如果代码量非常大,那就极为痛苦了。MDK提供了这样的快速定位的功能。只要你把光标放到我们想要查找的函数或变量的上面,然后右键,弹出如图9.4-2所示的菜单栏:

图9.4-2 快速定位
上图中我们找到Goto Definition Of ‘RCC_APB2PeriphClockCmd’这个地方,然后单击左键就可以快速跳到RCC_APB2PeriphClockCmd函数的定义处,如图9.4-3所示。

图9.4-3 定位结果
但这里需要注意,要实现快速定位必须满足以下两个条件,缺一不可。
条件1:在魔术棒中的Output 选项卡里面勾选 Browse Information 选项,如图9.4-4所示。

图9.4-4 魔术棒中配置快速定位
条件2:该工程必须被编译过才能定位!
对于变量我们也可以按这样的操作快速来定位这个变量被定义的地方,大大缩短了我们查找代码的时间。
我们利用Go to Definition看完函数/变量的定义后,如果想返回之前的代码,此时我们可以通过工具栏上的![]() 按钮(Back to previous position)快速的返回之前的位置,也可以通过
按钮(Back to previous position)快速的返回之前的位置,也可以通过![]() 按钮再切换回去。这两个箭头就是各代码编辑位置进行切换的,如图9.4-5所示。
按钮再切换回去。这两个箭头就是各代码编辑位置进行切换的,如图9.4-5所示。

图9.4-5 代码编辑位置切换
9.4.3 快速注释与快速消注释
在调试代码的时候,在MDK中可以通过右键对一段代码进行快速注释/取消注释。这个操作比较简单,就是先选中要注释的代码区,然后右键,选择Advanced→Comment Selection就可以了。取消注释与注释类似,先选中被注释掉的地方,然后通过右键→Advanced,选择Uncomment Selection即可。

图9.4-6 注释与取消注释
9.4.4 快速插入&打开头文件

图9.4-7 快速插入头文件
如图9.4-7,我们可以在需要插入头文件定义的地方,鼠标右键,选择Insert '#Include file' ,MDK会根据我们选择的MCU类型自动提供我们需要插入的头文件,当然不嫌麻烦,手动输入也是可以的。
右键选择 Open Doc-ument“XXX”,就可以快速打开我们要看的头文件了(XXX 是我们要打开的头文件名字),如上图9.4-7,我们选择的Insert选项的上一个选项便是。
9.4.5 查找替换功能
这个和Word等编辑器是一样:
Ctrl+F:查找
Ctrl+H:替换
不管是查找还是替换,都会调出如下图9.4-8的查找替换对话框:

图9.4-8 查找和替换
这个用法和Word等一样,就不赘述了。简单再说一下,上面最后一个选项卡“Find in Files”就是可以选择在整个工程中进行查找我们需要的函数或变量等,并在消息栏里给出搜索的结果。如图9.4-9.

图9.4-9 Find in Files 查找结果
另外提一下,查找和替换,如图9.4-8这个对话框,也可以在工具栏中点击![]() 图标,如下图9.4-10.
图标,如下图9.4-10.

图9.4-10 工具栏里的查找图标
第10章.创建MDK工程-寄存器版
本章介绍如何创建寄存器版本的MDK工程。
10.1 新建本地工程文件夹

图10.1-1 新建文件夹
我们首先建立一个文件夹(取名:Led_RegVersion)用于后续建立MDK工程。正常项目我们这个时候是需要再建立一些文件夹,用来分别存放启动文件,外设以及内核等支持文件的,这章我们就省掉这一步,后续正式建工程的时候再正规讲解,也是为了有一个对比,效果会更好。
10.2 新建工程
打开MDK,新建一个工程,工程名根据个人喜好,最好取一个一眼就能知道含义的名字,我这里取LED_RegVersionTest,直接保存在上一步骤建立的Led_RegVersion文件中。


图10.2-1 新建工程
10.2.1 选择MCU 型号
新建工程后会弹出MCU型号选择对话框,这个根据我们自己所用的型号选择即可,我们用的F103C8T6,所以我们选择STM32F103C8。注意如果这里没有你找到的型号,说明前面安装的时候没有安装对应的器件支持包,安装一下即可。
 图10.2-2 选择MCU型号
图10.2-2 选择MCU型号
10.2.2 在线添加库文件
点击 OK后MDK 会弹出 Manage Run-Time Environment 对话框,如图 10.2-3 所示.在这个界面,我们可以添加自己需要的组件,从而方便构建开发环境,这里我们暂时用不到就直接跳过,我们直接点击 Cancel,即可。
 图10.2-3 Manage Run-Time Environment 界面
图10.2-3 Manage Run-Time Environment 界面
10.2.3 生成工程文件结构介绍
此时我们打开我们创建的文件夹,会看到 MDK 在该文件夹下自动创建了 3 个文件夹:
DebugConfig,Listings 和 Objects),如图 10.2-4所示. 这三个文件夹是随着.uvprojx文件创建时自动生成的。

图10.2-4 MDK新建工程时自动创建的文件夹
这三个文件夹的作用如下图10.2-5所示:

图10.2-5 MDK自动生成的文件夹的作用
10.2.4 添加分组及文件
在Project→Target 上右键,选择 Manage Project Items…或在菜单栏点击品字形红绿白图标进入工程管理界面,如图10.2-6所示:

图10.2-6 进入工程管理界面
在工程管理界面,我们可以执行设置工程名字(Project Targets)、分组名字(Groups)以
及添加每个分组的文件(Files)等操作。我们设置工程名字为:Target 1,并设置2个分组:
Startup(存放启动文件)、User(存放 main.c 等用户代码)如图 10.2-7所示:

图10.2-7 工程管理配置
在实际使用过程中,我们也经常会在新建的组里右键添加文件,如图10.2-8。

图10.2-8 组新建文件
添加启动文件
启动文件就是,系统上电后第一个运行的程序,由汇编编写。这个文件从标准固件库里面复制过来即可,由官方提供。这个文件我们添加到前面建立的Startup组里去。文件在下面目录,如图10.2-6。 STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x\startup\arm

图10.2-6 启动文件
从上图我们可以看到,启动文件有很多,哪个是我们需要的呢?我们可以根据下表10.2-1查找。我们所用的STM32F103C8T6是64K的ROM因此,对应的启动文件是后缀为MD的,即启动文件为:startup_stm32f10x_md.s。我们把这个文件copy到我们新建的文件夹Led_RegVersion之下。
表10.2-1 不同型号STM32缩写
| 缩写 | 含义 | Flash | 型号 |
| LD_VL | 小容量产品超值系列 | 16~32K | STM32F100 |
| MD_VL | 中容量产品超值系列 | 64~128K | STM32F100 |
| HD_VL | 大容量产品超值系列 | 256~512K | STM32F100 |
| LD | 小容量产品 | 16~32K | STM32F101/102/103 |
| MD | 中容量产品 | 64~128K | STM32F101/102/103 |
| HD | 大容量产品 | 256~512K | STM32F101/102/103 |
| XL | 加大容量产品 | 大于512K | STM32F101/102/103 |
| CL | 互联型产品 | - | STM32F105/107 |
添加Main.c文件
用户手动新建,用于存放main 函数,暂时为空。建成后文件夹如图10.2-7所示。这个我们添加到User组里。

图10.2-7 添加文件后的文件夹
10.3 硬件连接
如图10.3-1,我们把LED 灯的阳极连接到3.3V 电源,阴极各经过1 个限流电阻接到我们使用的STM32最小系统板的PB0口,我们只要控制这PB0引脚输出高/低电平,即可控制所连接LED 灯的亮灭。我们的目标是把GPIO-PB0口的引脚设置成推挽输出模式并且默认下拉,输出低电平,这样就能让LED灯亮起来了。(关于GPIO的模式等问题后面再讲,这里不用管)

图10.3-1 硬件连接图
10.4 代码编写
10.4.1 启动文件解释
前面名为“startup_stm32f10x_md.s”的文件,它里边使用汇编语言写好了基本程序,当STM32芯片上电启动的时候,首先会执行这里的汇编程序,从而建立起C语言的运行环境,所以我们把这个文件称为启动文件。该文件使用的汇编指令是Cortex-M3内核支持的指令。startup_stm32f10x_md.s文件由官方提供,一般不需要修改。启动文件这部分的主要功能如下:
•初始化堆栈指针SP;
•初始化程序计数器指针PC;
•设置堆、栈的大小;
•初始化中断向量表;
•调用SystemIni()函数配置STM32的系统时钟。
•设置C库的分支入口“__main”(最终用来调用main函数);
这里面对我们来说最重要的是,在启动文件中有一段复位后立即执行的程序,搜索Reset_Handler 即可找到,代码如下:

图10.4-1 启动文件中Reset_Handler代码
下面对这段代码进行解析:
; Reset handler
代码含义:程序注释,在汇编里面注释用的是“;”,相当于C 语言的“//”注释符。Reset_Handler PROC
代码含义:
定义了一个子程序:Reset_Handler。PROC 是子程序定义伪指令。这里就相当于C 语言
里定义了一个函数,函数名为Reset_Handler。EXPORT Reset_Handler [WEAK]
代码含义:
EXPORT 表示Reset_Handler 这个子程序可供其他模块调用。相当于C 语言的函数声明。
关键字[WEAK] 表示弱定义,如果编译器发现在别处定义了同名的函数,则在链接时用别处的地
址进行链接,如果其它地方没有定义,编译器也不报错,以此处地址进行链接。IMPORT __main
IMPORT SystemInit
代码含义:
IMPORT 说明SystemInit 和__main 这两个标号在其他文件,在链接的时候需要到
其他文件去寻找。相当于C 语言中,从其它文件引入函数声明。以便下面对外部函数进行调
用。__main其实不是我们定义的(不要与C语言中的main函数混淆),这是一个C库函数,当编译器编译时,只要遇到这个标号就会定义这个函数,该函数的主要功能是:负责初始化栈、堆,配置系统环境,并在函数的最后调用用户编写的main函数,从此来到C的世界。SystemInit是用来配置系统时钟的,这个是官方写好的。
LDR R0, =SystemInit
代码含义:
把SystemInit 的地址加载到寄存器R0。
BLX R0
代码含义:
程序跳转到R0 中的地址执行程序,即执行SystemInit 函数的内容。
LDR R0, =__main
代码含义:
把__main 的地址加载到寄存器R0。
BX R0
代码含义:
程序跳转到R0 中的地址执行程序,即执行__main 函数,执行完毕之后就去到我们熟知的
C 世界,进入main 函数。
ENDP
代码含义:
表示子程序的结束因为我们目前体验的是寄存器版本的MDK工程,我们是假定没有官方支持的,所以我们的函数里是没有SystemInit这个函数的,为了程序不报错,我们有2种处理方法:
1.修改一下启动代码,把SystemInit相关的注释掉。修改后如下:
; Reset handler
Reset_Handler PROC
EXPORT Reset_Handler [WEAK]
IMPORT __main
;IMPORT SystemInit
;LDR R0, =SystemInit
;BLX R0
LDR R0, =__main
BX R0
ENDP2.在我们的C文件函数里编写一个 SystemInit的空函数。
因为启动文件是只读的,改起来麻烦,我们就直接采用写个SystemInit的空函数的方式。
10.4.2 main.c编写
现在我们开始编写我们的程序。除了前面提到的SystemInit的空函数, 我们主要是要配置GPIO-PB0端口,使其输出低电平。这里主要需要配置3个寄存器,分别是:
①开启APB2时钟控制寄存器
②CRL输入输出方式寄存器
③ODR端口输出数据寄存器
这里不太懂没关系,后面我们还会针对GPIO开专题讲解。下面是配置方式:
①开启外设时钟:
由于STM32 的外设很多,为了降低功耗,每个外设都对应着一个时钟,在芯片刚上电的时候这些时钟都是被关闭的,如果想要外设工作,必须把相应的时钟打开。STM32 的所有外设的时钟由一个专门的外设来管理,叫RCC(Reset and ClockControl),RCC 在《STM32 中文参考手册》的第六章。
通过前面章节,我们知道所有的GPIO 都挂载到APB2 总线上,具体的时钟由APB2外设时钟使能寄存器(RCC_ APB2ENR)来控制。
首先我们需要配置RCC_ APB2ENR的地址。关于地址的配置,可以参考本专栏的第5章。
在《STM32 中文参考手册》中RCC寄存器的地址范围,如图10.4-2:

10.4-2 参考手册中RCC寄存器地址范围
由此我们看到,RCC时钟控制寄存器的基地址是0x4002 1000。APB2外设时钟使能寄存器(RCC_ APB2ENR)的描述如下图,我们只用把该寄存器的bit3置1即可开启GPIO-B的时钟。

图10.4-3 APB2外设时钟使能寄存器
根据以上信息,相关代码如下,代码中“|=”的目的是不改变其他bit的设置。
/*RCC基地址*/
#define RCC_BASE ((unsigned int) 0x40021000)
/*GPIO_B地址*/
#define RCC_APB2ENR *(unsigned int*)(RCC_BASE+0x18)
RCC_APB2ENR |= 0x00000008;// 开启 GPIOB 端口 时钟②配置输入输出方式:
首先我们把连接到LED灯的GPIO引脚PB0配置成输出模式,即配置GPIO的端口配置低寄存器CRL,见图GPIO端口控制低寄存器CRL。CRL中包含0-7号引脚,每个引脚占用4个寄存器位。MODE位用来配置输出的速度,CNF位用来配置各种输入输出模式。在这里我们把PB0配置为通用推挽输出,输出的速度为10M。

图10.4-4 CRL寄存器配置图
对应代码如下:
/*GPIO-B基地址*/
#define GPIOB_BASE ((unsigned int) 0X40010C00)//可查看参考手册
/*GPIO_B-CRL地址*/
#define GPIOB_CRL *(unsigned int*)(GPIOB_BASE+0x00)
GPIOB_CRL &= ~((unsigned int)0x0000000F);// 清空控制 PB0 的端口位
GPIOB_CRL |= (unsigned int)0x00000001;// 配置 PB0 为通用推挽输出,速度为 10M
③配置端口输出寄存器:
我们在这里直接操作ODR 寄存器来控制GPIO的电平,如图10.4-5.ODR寄存器的配置图。

图10.4-6 ODR寄存器配置图
对应代码如下:
/*GPIO_B-CRL地址*/
#define GPIOB_ODR *(unsigned int*)(GPIOB_BASE+0x0C)
GPIOB_ODR &= ~((unsigned int)0x00000001);// PB0 输出低电平至此代码全部写完,完整的代码如下:
/*RCC基地址*/
#define RCC_BASE ((unsigned int) 0x40021000)
/*GPIO_B地址*/
#define RCC_APB2ENR *(unsigned int*)(RCC_BASE+0x18)
/*GPIO-B基地址*/
#define GPIOB_BASE ((unsigned int) 0X40010C00)//可查看参考手册
/*GPIO_B-CRL地址*/
#define GPIOB_CRL *(unsigned int*)(GPIOB_BASE+0x00)
/*GPIO_B-CRL地址*/
#define GPIOB_ODR *(unsigned int*)(GPIOB_BASE+0x0C)
void SystemInit(void);
int main()
{
RCC_APB2ENR |= 0x00000008;// 开启 GPIOB 端口 时钟
GPIOB_CRL &= ~((unsigned int)0x0000000F);// 清空控制 PB0 的端口位
GPIOB_CRL |= (unsigned int)0x00000001;// 配置 PB0 为通用推挽输出,速度为 10M
GPIOB_ODR &= ~((unsigned int)0x00000001);// PB0 输出低电平
while(1)
{
}
}
void SystemInit(void)// 函数为空,目的是为了骗过编译器不报错
{
}
10.5 魔术棒配置
10.5.1 Output 选项卡

图10.5-1 Output选项卡配置
Output 选项卡主要是选择把输出文件放到哪个文件夹,如果不选择就是系统默认的前面建立工程时自动生成的“Objects”文件夹,也可以自己选择指定文件夹存放。如果想在编译的过程中生成hex 文件,那么那Create HEX File 选项勾上。
10.5.2 Listing选项卡配置
在Listing 选项卡和前面Output类似,如果不选择就是系统默认的前面建立工程时自动生成的“Listings”文件夹,也可以选择自己习惯的文件夹。
10.5.2 下载器配置
在debug选项卡中,我们选择我们使用的下载器STLINK。右边蓝色框点开Debug Settings 选项配置,弹出对话框的“Flash Download”选项卡,把“Reset and Run 也勾选上,这样程序下载完之后就会自动运行,否则需要手动复位”。

图10.5-2 下载配置
10.6 下载程序
前面步骤都成功后,接下来就是编译,连接最小系统板到电脑,然后下载程序到最小系统板上运行。下载程序不需要其他额外的软件,直接点击KEIL中的LOAD 按钮即可,如图10.6-1。消息栏,出现“Application running…”,则表示代码下载成功,且开始运行 就可以观察实验现象了。

图10.6-1 编译下载
如图10.6-2我们终于点亮了我们第一个LED灯。。。

图10.6-2 实验现象
第11章.创建MDK工程-基于自建库函数
本章在上一节的基础上,介绍如何创建库函数,实现点亮LED灯的MDK工程。 我们上一章用寄存器点亮了LED,代码好像没有几行,看着也很简单,但是我们需要明白,我们点亮LED这个案例功能非常简单,只用了STM32功能的九牛一毛。在用寄存器点亮LED的时候,每次配置写代码的时候都要对照着《STM32F10X-中文参考手册》中寄存器的说明,然后根据说明对每个控制的寄存器位写入特定参数,因此在配置的时候非常容易出错,而且代码可读性不强不好理解,难于维护。所以学习STM32最好的方法是用固件库,然后在固件库的基础上了解底层,学习寄存器。懂得原理后,我们开发自然是用已有的固件库去开发效率最高,也便于维护。
11.1 基于库函数的开发方式
这个问题我们前面第8章已经进行过了介绍,这里再简单提一下。固件库是指“STM32标准函数库”,它是由ST公司针对STM32提供的函数接口,即API(Application Program Interface),开发者可调用这些函数接口来配置STM32的寄存器,使开发人员得以脱离最底层的寄存器操作,有开发快速,易于阅读,维护成本低等优点。当我们调用库API的时候不需要挖空心思去了解库底层的寄存器操作,就像当年我们编程的时候调用某个函数,我们会用就行,并不需要去研究它的源码实现。
简单来讲库就是架设在寄存器与用户驱动层之间的代码,向下处理与寄存器直接相关的配置,向上为用户提供配置寄存器的接口。库开发方式与直接配置寄存器方式的区别见图11.1-1。

图11.1-1 固件库开发与寄存器开发对比
相对于库开发的方式,直接配置寄存器方式生成的代码量的确会少一点,但因为STM32 有充足的资源,权衡库的优势与不足,绝大部分时候,我们愿意牺牲一点CPU 资源,选择库开发。一般只有在对代码运行时间要求极苛刻的地方,才用直接配置寄存器的方式代替,对于库开发与直接配置寄存器的方式,就好比编程是用汇编好还是用C 好一样。
那么对于STM32的学习哪种方式好呢?有人认为用寄存器好。事实上,库函数的底层实现正是直接配置寄存器的最好例子,它代替我们完成了寄存器配置的工作,而想深入了解芯片是如何工作的,我们只要直接查看库函数的最底层实现就能理解。等我们读懂了库函数的实现方式,一定会为它的严谨和优美的实现方式而倾倒,也是我们学习C语言的极好教材,ST的库实现方式堪称教科书级别的上好资料。所以基于ST库的学习,我们既能学会用寄存器控制STM32,还能学到库函数的封装技巧。
11.2 构建自己的库函数
构建自己的库函数,其实就是把我们上一节中,寄存器地址计算和一些位操作封装起来到一个.c文件或者头文件中。然后用的时候直接调用即可。
如图11.2-1,我们和上节一样的方式创建一个MDK工程,命名为LED_LibVersionTest.在文件夹中新建一个stm32f10x.h的空文件,并添加到Startup组里(或者从startup里右键创建也可以),这个文件用于我们后面编写库函数。如图11.2-2.

图11.2-1 新建库函数的MDK工程

11.2-2 新建自建库函数版MDK工程文件夹
后面我们在上节寄存器点亮LED 的代码上继续完善,把代码一层层封装,实现库的最初的雏形,经过这一步的学习后,我们对库的理解和运用会更加深入。本节主要是实现GPIO的函数库,其他外设大同小异,我们直接参考ST标准库即可,不必自己写,懂得原理就够了。
下面的代码都是标准库里的,我们只是摘出来,了解库的建立过程。举一反三,道理都是一样的。
11.2.1 头文件的常见操作
在开始后面内容之前我们先讲一个C编程的常见知识点。假如我们编写了一个.c文件,文件中的变量或者函数,是可能被其他文件调用的,我们一般会相应创建一个同名的.h文件,用以对这个.c文件的声明。例如我们创建了一个head.c文件,对应的我们要新建一个head.h文件。而在head.h文件里,开头的语句一般都是固定的防重复包含的预处理指令#ifndef,#define,#endif语句。如下代码所示:
#ifndef __HEAD_H
#define __HEAD_H
// ... 这里是头文件的内容,比如函数声明、结构体定义等 ...
#endif // __HEAD_H在C语言(以及C++)中,使用#ifndef、#define和#endif预处理指令来防止头文件被多次包含(也称为“包含守卫”或“头文件保护”)是一种常见的做法。这样做的目的是避免在编译时因多次包含同一个头文件而导致的重复定义错误。
具体来说,#ifndef __HEAD_H检查是否已定义了名为__HEAD_H的宏。如果没有定义(即这是第一次包含该头文件),则编译器会执行#define __HEAD_H,定义这个宏,并继续处理头文件中的其余内容。如果__HEAD_H已经被定义(即这不是第一次包含该头文件),则编译器会跳过头文件中的其余内容,从而避免了重复定义。
注意:宏名(如__HEAD_H)通常是大写的,并且包含双下划线前缀和后缀,以避免与程序中的其他标识符冲突。
11.2.2 外设寄存器结构体定义
上一章我们在操作寄存器的时候,是查到寄存器的绝对地址后,挨个进行配置,如果每个外设寄存器都这样操作,那就太麻烦了。从前面第5章,我们知道外设寄存器的地址都是基于外设基地址加偏移地址,都是在外设基地址上逐个连续递增的,每个寄存器占32 个字节,这种方式跟结构体里面的成员类似。因此我们可以定义一种外设结构体,结构体的地址等于外设的基地址,结构体的成员等于寄存器,成员的排列顺序跟寄存器的顺序一样。这样我们操作寄存器的时候就不用每次都找到绝对地址,只要知道外设的基地址就可以操作外设的全部寄存器,即操作结构体的成员即可。
在工程中的“stm32f10x.h”文件中,我们使用结构体封装GPIO 及RCC 外设的的寄存器,代码如下。结构体成员的顺序按照寄存器的偏移地址从低到高排列,成员类型跟寄存器类型一样。
//volatile 表示易变的变量,防止编译器优化,
#define __IO volatile
typedef unsigned int uint32_t;
typedef unsigned short uint16_t;
// GPIO 寄存器结构体定义
typedef struct
{
__IO uint32_t CRL; // 端口配置低寄存器, 地址偏移 0X00
__IO uint32_t CRH; // 端口配置高寄存器, 地址偏移 0X04
__IO uint32_t IDR; // 端口数据输入寄存器, 地址偏移 0X08
__IO uint32_t ODR; // 端口数据输出寄存器, 地址偏移 0X0C
__IO uint32_t BSRR; // 端口位设置/清除寄存器,地址偏移 0X10
__IO uint32_t BRR; // 端口位清除寄存器, 地址偏移 0X14
__IO uint32_t LCKR; // 端口配置锁定寄存器, 地址偏移 0X18
} GPIO_TypeDef;图11.2-3 寄存器结构体定义
代码中结构体成员前增加了前缀“__IO”,代码的第一行#define__IO volatile,指定了C语言中的关键字“volatile”,含义是要求编译器不要优化,这个在前面《第2章.STM32开发C语言常用知识点》已有介绍。
11.2.3 外设存储器映射
外设寄存器结构体定义之后,下一步就是把寄存器地址跟结构体的地址对应起来。映射的方法在上一节以及《第5章.STM32F1x的寄存器和存储器》里已经有提及。这块代码如下:
/*片上外设基地址 */
#define PERIPH_BASE ((unsigned int)0x40000000)
/*APB2 总线基地址 */
#define APB2PERIPH_BASE (PERIPH_BASE + 0x10000)
/* AHB 总线基地址 */
#define AHBPERIPH_BASE (PERIPH_BASE + 0x20000)
/*GPIO 外设基地址*/
#define GPIOA_BASE (APB2PERIPH_BASE + 0x0800)
#define GPIOB_BASE (APB2PERIPH_BASE + 0x0C00)
#define GPIOC_BASE (APB2PERIPH_BASE + 0x1000)
#define GPIOD_BASE (APB2PERIPH_BASE + 0x1400)
#define GPIOE_BASE (APB2PERIPH_BASE + 0x1800)
#define GPIOF_BASE (APB2PERIPH_BASE + 0x1C00)
#define GPIOG_BASE (APB2PERIPH_BASE + 0x2000)
/*RCC 外设基地址*/
#define RCC_BASE (AHBPERIPH_BASE + 0x1000) 11.2.4 外设声明
实现完外设存储器映射后,我们再把外设的基地址进行强制类型转换,转换为我们前面定义的外设寄存器结构体指针类型,然后再把该指针声明成外设名,外设名(即寄存器结构体指针)就跟外设的地址对应起来了,通过该外设名可以直接操作该外设的全部寄存器,代码如下:
/* GPIO 外设声明 */
#define GPIOA ((GPIO_TypeDef *) GPIOA_BASE)
#define GPIOB ((GPIO_TypeDef *) GPIOB_BASE)
#define GPIOC ((GPIO_TypeDef *) GPIOC_BASE)
#define GPIOD ((GPIO_TypeDef *) GPIOD_BASE)
#define GPIOE ((GPIO_TypeDef *) GPIOE_BASE)
#define GPIOF ((GPIO_TypeDef *) GPIOF_BASE)
#define GPIOG ((GPIO_TypeDef *) GPIOG_BASE)
/*RCC 外设声明 */
#define RCC ((RCC_TypeDef *) RCC_BASE)
/*RCC 的 AHB1 时钟使能寄存器地址,强制转换成指针*/
#define RCC_APB2ENR *(unsigned int*)(RCC_BASE+0x18) 下面开始,我们就对上节main.c函数中出现的操作函数,一一进行函数定义,再写main.c的时候,就可以直接调用。
11.2.5 GPIO的位操作函数
现在我们在组“Startup”里再新建2个文件,分别是stm32f10x_gpio.c和stm32f10x_gpio.h。操作方法如下图11.2-4.

图 11.2-4 新建.c和.h文件
把上节Main函数中对GPIO外设操作的函数及其宏定义分别存放在stm32f10x_gpio.c和stm32f10x_gpio.h文件中。可以理解为.c文件是用来描述函数的具体的实现方式,.h文件是对这些.c里定义的函数或变量的全局声明。也就是这2个文件都是和GPIO相关的。
在上一节我们把PB0设置为0的时候,是通过把GPIO的ODR寄存器对应端口直接写入值实现,我们也可以通过BSRR和BRR寄存器对相应位进行置位或清除操作。
11.2.5.1 位设置函数

图11.2-5 STM32F10X-中文参考手册中位设置/清除寄存器BSRR说明
如上图是BSRR端口设置/清除寄存器的说明, 我们如果要设置PB0为1,只需要设置BSRR寄存器的0位为1即可,即:
GPIOB->BSRR |= 0x0001;如果是设置第二位为1就是, GPIOB->BSRR |= 0x0002;第三位就是GPIOB->BSRR |= 0x0004;我们这里会发现一个问题,就是0x0002等不够形象,我们如果用宏定义,用对应的Pin名称来代替就会好很多,于是我们可以这么操作,在stm32f10x_gpio.h对各pin做如下宏定义:
#define GPIO_Pin_0 ((uint16_t)0x0001) //Pin0 即(00000000 00000001)b
#define GPIO_Pin_1 ((uint16_t)0x0002) //Pin1 即(00000000 00000010)b
#define GPIO_Pin_2 ((uint16_t)0x0004) //Pin2 即(00000000 00000100)b
#define GPIO_Pin_3 ((uint16_t)0x0008) //Pin3 即(00000000 00001000)b
#define GPIO_Pin_4 ((uint16_t)0x0010) //Pin4 即(00000000 00010000)b
#define GPIO_Pin_5 ((uint16_t)0x0020) //Pin5 即(00000000 00100000)b
#define GPIO_Pin_6 ((uint16_t)0x0040) //Pin6 即(00000000 01000000)b
#define GPIO_Pin_7 ((uint16_t)0x0080) //Pin7 即(00000000 10000000)b
#define GPIO_Pin_8 ((uint16_t)0x0100) //Pin8 即(00000001 00000000)b
#define GPIO_Pin_9 ((uint16_t)0x0200) //Pin9 即(00000010 00000000)b
#define GPIO_Pin_10 ((uint16_t)0x0400) //Pin10 即(00000100 00000000)b
#define GPIO_Pin_11 ((uint16_t)0x0800) //Pin11 即(00001000 00000000)b
#define GPIO_Pin_12 ((uint16_t)0x1000) //Pin12 即(00010000 00000000)b
#define GPIO_Pin_13 ((uint16_t)0x2000) //Pin13 即 (00100000 00000000)b
#define GPIO_Pin_14 ((uint16_t)0x4000) //Pin14 即(01000000 00000000)b
#define GPIO_Pin_15 ((uint16_t)0x8000) //Pin15 即(10000000 00000000)b 在stm32f10x_gpio. c中定义位设置函数GPIO_SetBits如下:
void GPIO_SetBits(GPIO_TypeDef *GPIOx,uint16_t GPIO_Pin)
{
/*
$函数功能:设置GPIOx对应引脚为高电平
$参数说明:
@GPIOx: 该参数为 GPIO_TypeDef 类型的指针,指向GPIO 端口的地址
@GPIO_Pin: 选择要设置的 GPIO 端口引脚,可输入GPIO_Pin_0-15,表示 GPIOx 端口 0-15 号引脚
*/
GPIOx->BSRR |= GPIO_Pin;
}11.2.5.2 位清除函数
位清除函数和位设置函数的操作方式一样,只是需要操作BRR寄存器,如图11.2-6. 这里不再赘述。

图11.2-6 STM32F10X-中文参考手册中位清除寄存器BRR说明
在stm32f10x_gpio. c中定义位设置函数GPIO_ResetBits如下:
void GPIO_ResetBits( GPIO_TypeDef *GPIOx,uint16_t GPIO_Pin )
{
/*
$函数功能:设置GPIOx对应引脚为低电平
$参数说明:
@GPIOx: 该参数为 GPIO_TypeDef 类型的指针,指向GPIO 端口的地址
@GPIO_Pin: 选择要设置的 GPIO 端口引脚,可输入GPIO_Pin_0-15,表示 GPIOx 端口 0-15 号引脚
*/
GPIOx->BRR |= GPIO_Pin;
}
11.2.6 定义GPIO初始化函数
上一节我们知道,除了位操作,还有GPIO工作模式以及速度等的设置。下面我们开始这一部分的功能设计。设计的核心思想其实就是用“名称”去替代那些难以记忆的数字,把一切操作尽量都做到“名称化”,只要看到名称就知道是什么意思,提高代码的可读性和可操作性,不用再每写一个功能就去不停地翻看参考手册。
那么根据前面一节main.c中这部分的代码,需要“名称化”的内容主要有:GPIO引脚,GPIO速度,GPIO工作模式,以及GPIO的初始化函数。GPIO引脚前面已经实现了,这里就不讲了。
11.2.6.1 GPIO初始化结构体
为方便后续的GPIO初始化,我们有必要声明一个名为GPIO_InitTypeDef的结构体类型。 我们在头文件stm32f10x_gpio.h中进行如下定义:
typedef struct
{
uint16_t GPIO_Pin; // 选择要配置的 GPIO 引脚
uint16_t GPIO_Speed; // 选择 GPIO 引脚的速率
uint16_t GPIO_Mode; // 选择 GPIO 引脚的工作模式
}GPIO_InitTypeDef;定义这个结构体之后,我们以后在初始化某个GPIO前,就可以先定义一个这样的结构体变量,根据需要配置的GPIO模式,对这个结构体的成员进行赋值,最后再把这个变量作为“GPIO初始化函数”的输入参数,该函数能根据这个输入参数值中的内容去配置相应寄存器,从而实现了GPIO的初始化操作。
但是我们上述定义的结构体类型,速率和模式仍使用“uint16_t”类型,那么成员值还得输入数字,赋值时还需要查询参考手册的寄存器说明。而实际上像速度和模式只能输入几个固定的数值。我们如何解决这个问题呢,让代码看上去既形象又不易出错?答案就是使用枚举类型。枚举类型可以对结构体成员起到限定输入的作用,只能输入相应已定义的枚举值,而且比较形象,见名知意。
下面我们就对GPIO的速率和工作模式进行枚举类型定义。
11.2.6.2 定义引脚模式的枚举类型
在上一节中,我们知道GPIO的PB0的工作模式和速率是在CRL寄存器配置的,CRL控制GPIOB的低8位,CRH控制高8位,因为我们用的是0位,这里方便起见,我们就只配置CRL。

图.11.2-7 CRL寄存器配置图
GPIO_Speed枚举类型:
由上图11.2-7可见,GPIO_Speed主要有10MHZ,2MHZ,50MHZ三个值,分别对应二进制数0b01,0b10,0b11,对应十进制的1,2,3.那么定义枚举类型就非常简单了,我们在 stm32f10x_gpio.h中做如下定义:
typedef enum
{
GPIO_Speed_10MHz = 1, // 10MHZ:(01)b
GPIO_Speed_2MHz, // 2MHZ :(10)b
GPIO_Speed_50MHz // 50MHZ : (11)b
}GPIOSpeed_TypeDef;如上代码中,枚举类型的定义中,第一个给出数字后,后面的如果是比前面得都大1,那么后面的枚举定义可以不用再写“=多少” ,当然写上也是无所谓的。如果不是这种后面比前面大1的关系,就必须每个都进行赋值。
GPIO_Mode枚举类型:
工作模式的枚举类型定义就比较难理解一些,我们先看代码,代码我们也是直接参考标准库。
typedef enum
{ GPIO_Mode_AIN = 0x0, // 模拟输入 (0000 0000)b
GPIO_Mode_IN_FLOATING = 0x04, // 浮空输入 (0000 0100)b
GPIO_Mode_IPD = 0x28, // 下拉输入 (0010 1000)b
GPIO_Mode_IPU = 0x48, // 上拉输入 (0100 1000)b
GPIO_Mode_Out_OD = 0x14, // 开漏输出 (0001 0100)b
GPIO_Mode_Out_PP = 0x10, // 推挽输出 (0001 0000)b
GPIO_Mode_AF_OD = 0x1C, // 复用开漏输出 (0001 1100)b
GPIO_Mode_AF_PP = 0x18 // 复用推挽输出 (0001 1000)b
}GPIOMode_TypeDef;单纯从定义的这些数值,我们很难发现什么规律,可以说之所以这么定义,完全是人为的,在便于理解的前提下通过后续我们编写的函数实现引脚的初始化配置。也就是根据我们人为指定的这个枚举类型,进行工作模式的配置。在引脚的初始化中引脚工作模式和速率是都要指定和配置的,这2个要结合起来看。为了便于理解,整理如下图11.2-8,转化成二进制之后,就比较容易发现规律。

图11.2-8 GPIO 引脚工作模式真值表
这个表里的高4位是人为定义的,可以根据个人习惯随意配置,仅仅是为了后续的GPIO初始化函数方便区分,真正要写进寄存器的是bit2和bit3,对应寄存器的CNFY[1:0]位,是我们真正要写入到CRL这个端口控制寄存器中的值。而bit1和bit0之所以都配置为0,主要是后续GPIO的初始化函数里,这2位是由前面的GPIO_Speed定义的。 bit4用来区分端口是输入还是输出,0表示输入,1表示输出。其中在下拉输入和上拉输入中我们设置 bit5 和 bit6 的值为 01 和 10 来以示区别。
至此,我们就可以对上节的GPIO初始化结构体,再进行改进。 我们的 GPIO_InitTypeDef 结构体就可以使用枚举类型来限定输入参数,也更形象。代码修改如下,unit16_t就可以替换为枚举类型了:
typedef struct
{
uint16_t GPIO_Pin;
GPIOSpeed_TypeDef GPIO_Speed;
GPIOMode_TypeDef GPIO_Mode;
}GPIO_InitTypeDef;11.2.6.3 定义GPIO 初始化函数
在开始写函数之前,需要首先讲一个知识点,否则代码就会看的云里雾里。如前面“图11.2-7 CRL寄存器配置图”,这里面上拉和下拉输入对应的CNF位都是10,并没有说明是怎么配置实现区分的。实际上是而是通过写BSRR 或者 BRR寄存器来实现的。
*下拉输入模式,引脚默认置0,对BRR寄存器写1对引脚置0;
*上拉输入模式,引脚默认值为1,对BSRR寄存器写1对引脚置1;
代码如下:
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct)
{
/*
* 函数功能:初始化引脚模式
* 参数说明:GPIOx,该参数为 GPIO_TypeDef 类型的指针,指向 GPIO 端口的地址
* GPIO_InitTypeDef:GPIO_InitTypeDef 结构体指针,指向初始化变量
*/
uint32_t currentmode = 0x00, currentpin = 0x00, pinpos = 0x00, pos = 0x00;
uint32_t tmpreg = 0x00, pinmask = 0x00;
/*---------------------- GPIO 模式配置 --------------------------*/
// 把输入参数GPIO_Mode的低四位暂存在currentmode
currentmode = ((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x0F);
// 判断bit4是1还是0,即首选判断是输入还是输出模式,bit4是1表示输出,bit4是0则是输入
if ((((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x10)) != 0x00)
{
// 输出模式则要设置输出速度
currentmode |= (uint32_t)GPIO_InitStruct->GPIO_Speed;
}
/*-------------GPIO CRL 寄存器配置 CRL寄存器控制着低8位IO- -------*/
// 配置端口低8位,即Pin0~Pin7
if (((uint32_t)GPIO_InitStruct->GPIO_Pin & ((uint32_t)0x00FF)) != 0x00)
{
// 先备份CRL寄存器的值
tmpreg = GPIOx->CRL;
// 循环,从Pin0开始配对,找出具体的Pin
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
// 令pos与输入参数GPIO_PIN作位与运算,为下面的判断作准备
currentpin = (GPIO_InitStruct->GPIO_Pin) & ( ((uint32_t)0x01) << pinpos);
//找到使用的引脚
if (currentpin !=0)
{
pos = pinpos << 2;// pinpos的值左移两位,相等于乘以4,因为寄存器中4个寄存器位配置一个引脚
//把控制这个引脚的4个寄存器位清零,其它寄存器位不变
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask;
// 向寄存器写入将要配置的引脚的模式
tmpreg |= (currentmode << pos);
// 判断是否为下拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
// 下拉输入模式,引脚默认置0,对BRR寄存器写1可对引脚置0,因为配置为0无影响,可以直接用=覆盖其他位,也可以用|=
GPIOx->BRR = (((uint32_t)0x01) << pinpos);
}
else
{
// 判断是否为上拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
// 上拉输入模式,引脚默认值为1,对BSRR寄存器写1可对引脚置1,因为配置为0无影响,可以直接用=覆盖其他位,也可以用|=
GPIOx->BSRR = (((uint32_t)0x01) << pinpos);
}
}
}
}
// 把前面处理后的暂存值写入到CRL寄存器之中
GPIOx->CRL = tmpreg;
}
/*-------------GPIO CRH 寄存器配置 CRH寄存器控制着高8位IO- -----------*/
// 配置端口高8位,即Pin8~Pin15
if (GPIO_InitStruct->GPIO_Pin > 0x00FF)
{
// 先备份CRH寄存器的值
tmpreg = GPIOx->CRH;
// 循环,从Pin8开始配对,找出具体的Pin
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
// pos与输入参数GPIO_PIN作位与运算
currentpin = (GPIO_InitStruct->GPIO_Pin) & ((((uint32_t)0x01) << (pinpos + 0x08)));
//找到使用的引脚
if (currentpin !=0)
{
//pinpos的值左移两位(乘以4),因为寄存器中4个寄存器位配置一个引脚
pos = pinpos << 2;
//把控制这个引脚的4个寄存器位清零,其它寄存器位不变
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask;
// 向寄存器写入将要配置的引脚的模式
tmpreg |= (currentmode << pos);
// 判断是否为下拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
// 下拉输入模式,引脚默认置0,对BRR寄存器写1可对引脚置0
GPIOx->BRR = (((uint32_t)0x01) << (pinpos + 0x08));
}
// 判断是否为上拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
// 上拉输入模式,引脚默认值为1,对BSRR寄存器写1可对引脚置1
GPIOx->BSRR = (((uint32_t)0x01) << (pinpos + 0x08));
}
}
}
// 把前面处理后的暂存值写入到CRH寄存器之中
GPIOx->CRH = tmpreg;
}
}下图是对程序中循环体的解释说明:

图11.2-9 程序循环体说明
11.3 基于自己构建库函数的主程序
完成以上工作后,我们就可以基于自己写的库函数,点亮LED。为和上次寄存器版本的做区分,这次我们点亮PB1端口。
int main()
{
RCC_APB2ENR |= 0x00000008;// 开启 GPIOB 端口 时钟
// 定义一个 GPIO_InitTypeDef 类型的结构体
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; // 选择要控制的 GPIO 引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 设置引脚模式为通用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 设置引脚速率为 50MHz
// 调用库函数,初始化 GPIO 引脚
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 使引脚输出低电平,点亮 LED1
GPIO_ResetBits(GPIOB,GPIO_Pin_1);
while(1)
{
}
}因为只是为了讲解原理,为使篇幅不至太长,上述代码中,RCC部分我们还没有构建函数,但道理是一样的,有兴趣的朋友可以自己尝试一下。
11.4 程序现象
编译下载后,LED成功点亮,如图11.4-1.

图11.4-1 程序现象
相关程序文件已上传资源:
第12章.STM32标准库简介
前面我们介绍了库函数的开发过程,有些单片机功能非常多,我们一个个去写库函数是不现实的,也是没有必要的,我们只需要大致了解原理和过程就足够了,学习他们构建库函数的思路和优美的实现过程。对我们开发人员来说,没有必要也没有意义挨个去捋一遍,学海无涯,人生苦短,在这个知识爆炸迭代快速的时代,点到即止方为上策。正常情况下,芯片厂商会提供自己芯片的库函数,我们只需要学会使用就够了。ST公司提供了针对STM32芯片的标准软件库,包含了STM32芯片所有寄存器的控制操作,我们学会使用ST标准库,对STM32的开发是极为重要的。
12.1 CMSIS 标准
基于Cortex系列芯片采用的内核是相同的,主要区别是片上外设的差异,这些差异却导致软件在同内核,不同外设的芯片上移植困难。于是CMSIS标准应运而生。
CMSIS(Cortex Microcontroller Software Interface Standard)是ARM Cortex微控制器的软件接口标准。这个标准由ARM公司联合一些芯片厂商制定,旨在为使用ARM Cortex-M系列处理器的嵌入式系统开发提供一个统一的软件接口,解决不同的芯片厂商生产的 Cortex 微控制器软件 的兼容性问题。这个和汽车行业的AUTOSAR软件标准的出发点是完全一致的。
不管什么标准,解决兼容和便于移植问题的主要方法,都是进行“抽象”,或者进行“层层抽象”。就和我们写C代码一样,程序里把一些和硬件相关的数字都用宏定义,操作函数名等都标准化,这样不管硬件怎么换,我们只需要修改下宏定义就完事了。 CMSIS 标准自然也不例外。
简单来说,CMSIS标准的主要内容和目标如下:
-
标准化接口:它定义了一套标准的API(应用程序接口),使得软件开发者能够以一种统一的方式来访问和控制Cortex-M微控制器的各种硬件特性,如处理器核心、内存、中断和外设等。
-
提高可移植性:由于接口是标准化的,因此开发者编写的代码可以更容易地在不同的Cortex-M微控制器之间移植,而无需进行大量的修改。
-
简化开发:CMSIS提供了一组库函数,封装了底层硬件的复杂性,使得开发者能够更专注于实现应用逻辑,而不是处理底层的硬件细节。
-
外设驱动标准化:CMSIS还尝试对外设驱动进行标准化,使得外设的使用也变得更加简单和一致。
通过实施CMSIS标准,嵌入式系统的开发变得更加高效、可预测,并且降低了将软件从一个微控制器迁移到另一个微控制器的成本。这对于需要快速迭代和适应不断变化的市场需求的嵌入式系统开发来说是非常重要的。CMSIS的架构图如图12.1-1所示:
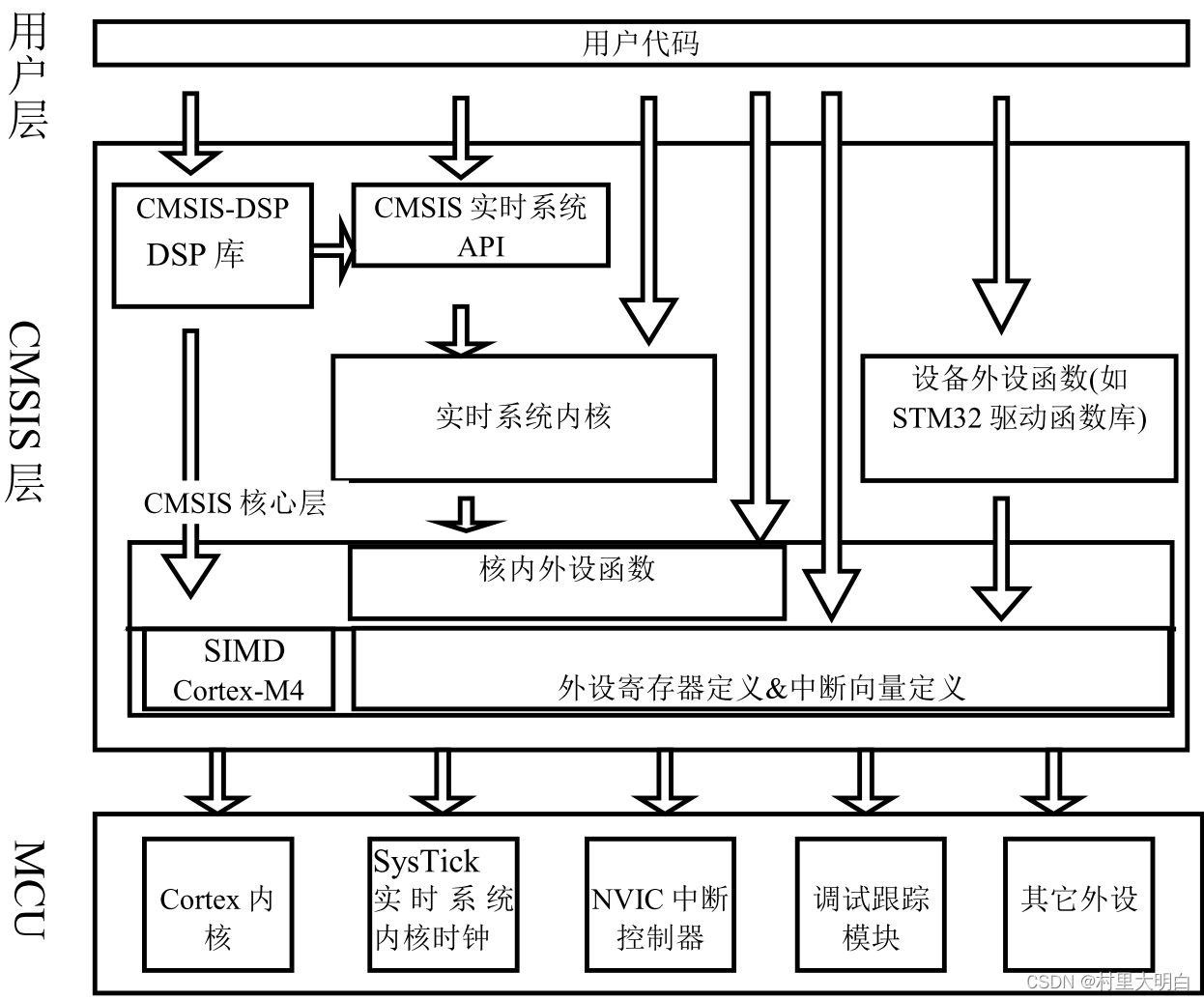
图12.1-1 CMSIS架构图
CMSIS 标准中最主要的为 CMSIS 核心层,它包括了:
内核函数层:其中包含用于访问内核寄存器的名称、地址定义,主要由 ARM 公司提
供。
设备外设访问层:提供了片上的核外外设的地址和中断定义,主要由芯片生产商提供。
CMSIS 层位于硬件层与操作系统或用户层之间,提供了与芯片生产商无关的硬件抽象层,可以为接口外设、实时操作系统提供简单的处理器软件接口,屏蔽了硬件差异。通过使用CMSIS标准,开发人员可以更加专注于实现应用程序的功能,而无需过多关注底层硬件的细节,也提高了软件的可移植性。
12.2 STM32标准库文件结构
12.2.1 主结构
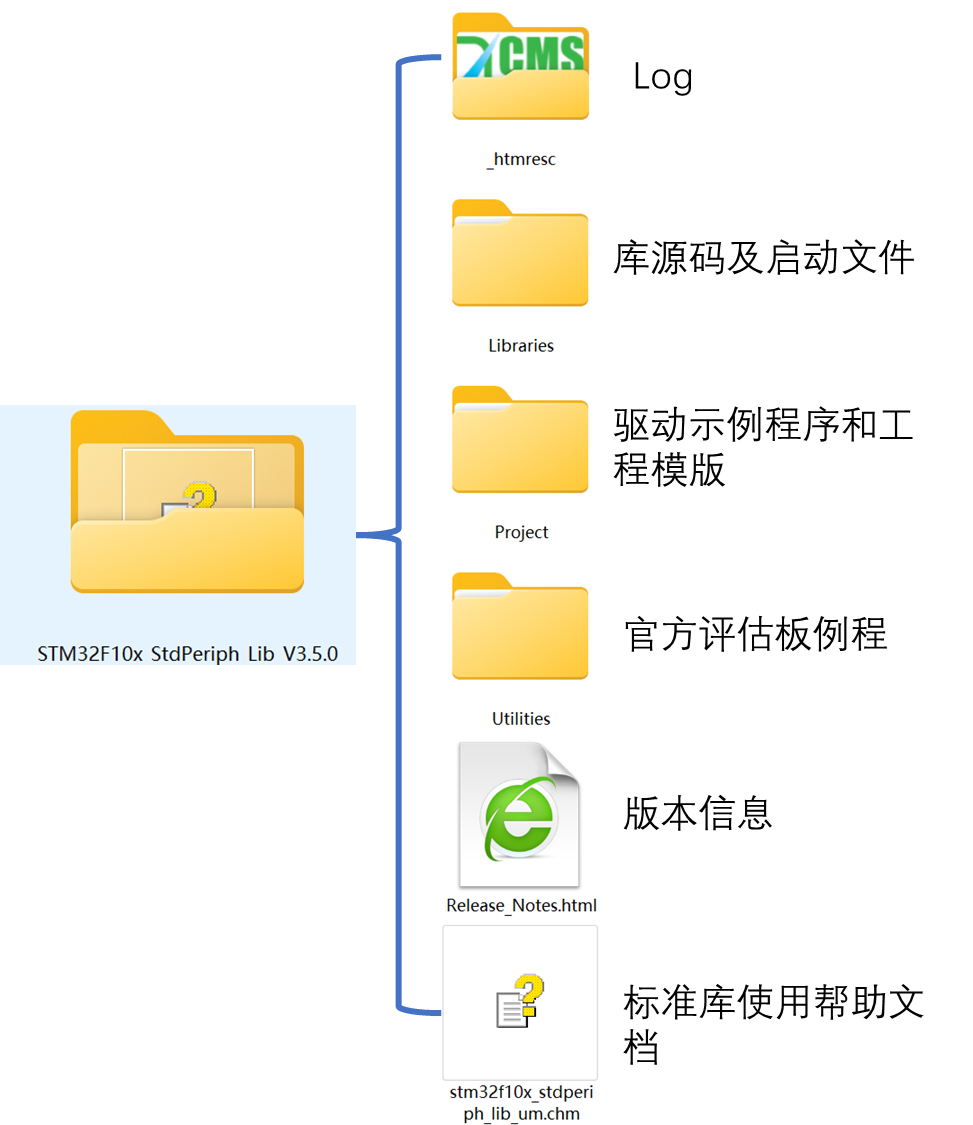
图12.2-1 STM32标准库文件目录
STM32的标准库函数文件夹“STM32F10x_StdPeriph_Lib_V3.5.0”打开后的结构如图12.2-1所示. 主要的文件简介如下:
Libraries:最核心重要的一个文件,文件夹里是驱动库的源代码及启动文件,我们使用的固件库就在这个文件夹里面。
Project:文件夹里是用标准库写的例程和工程模板,每个外设都有写好的例程,这对我们非常有借鉴意义,我们在开发和学习过程中可以参考这里面的例子。
Utilities:基于 ST 官方实验板的例程,这个我们开发过程不需要,可直接略过。
stm32f10x_stdperiph_lib_um.chm: 库帮助文档,一个编译好的HTML文件,不喜欢看源码的可以在这个文档中查询每个外设的函数说明。
12.2.2 Libraries固件库文件
在Libraries 文件夹可以看到CMSIS 和STM32F10x_StdPeriph_Driver 两个文件夹,分别代表了内核与外设相关的库文件 。
CMSIS文件夹
1.core_cm3.c&core_cm3.h
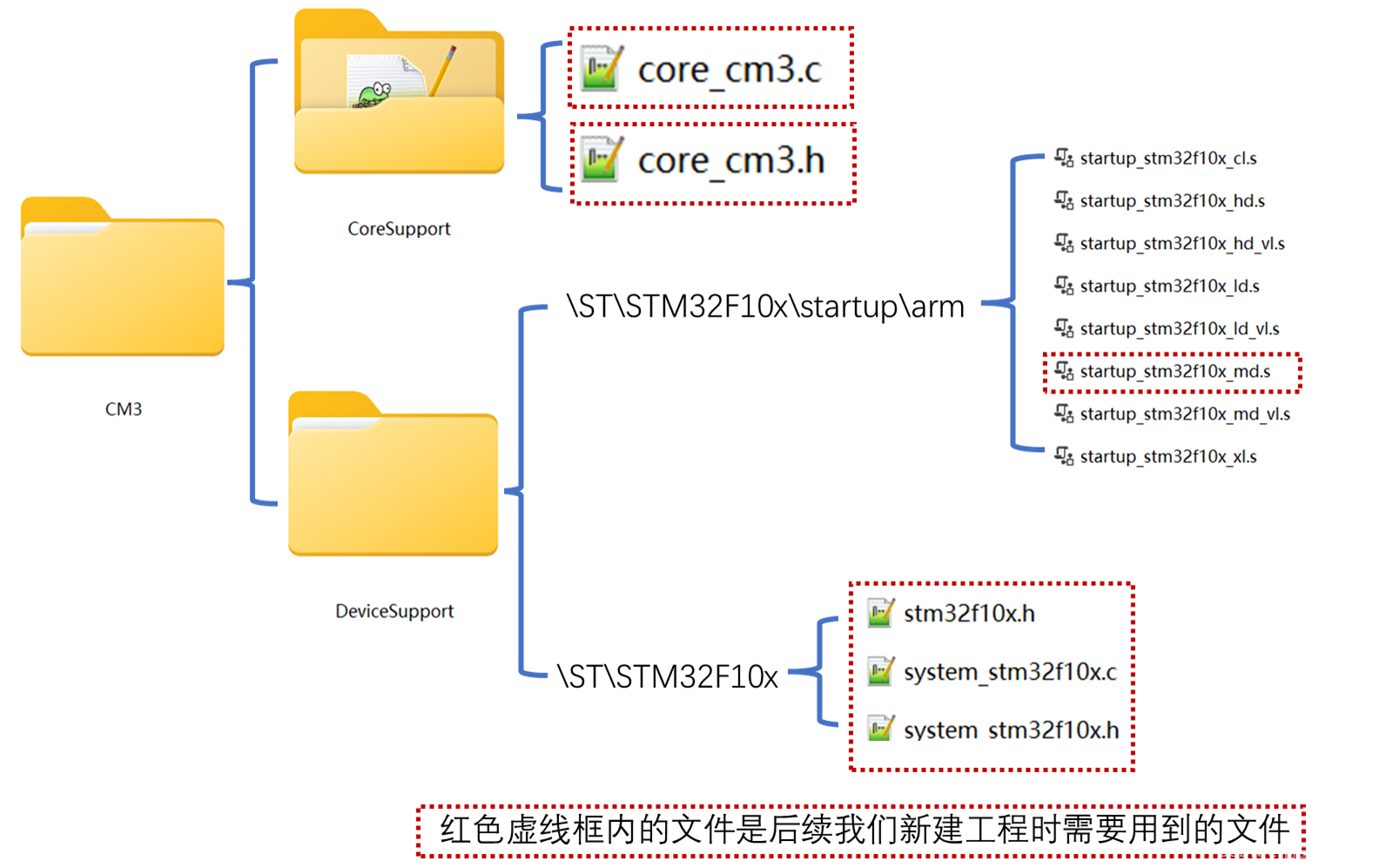
图12.2-2 CMSIS文件目录
CMSIS是内核相关的文件,文件夹中最主要的是CM3这个文件夹,其他的都是文档性质的,不重要。 红色虚线框内的文件是后续我们新建工程时需要用到的文件。
在CoreSupport文件夹中有core_cm3.c和core_cm3.h两个文件。Core_cm3.h头文件里面实现了内核的寄存器映射,对应外设头文件stm32f10x.h,区别是一个针对内核的外设,一个针对片上外设。core_cm3.c文件实现了一下操作内核外设寄存器的函数,实际开发过程中用的比较少。core_cm3.h头文件中还包含了“stdint.h”这个头文件,这是一个ANSIC文件,是独立于处理器之外的,就像我们熟知的C语言头文件“stdio.h”文件一样,主要作用是提供一些类型定义。 这些类型定义屏蔽了在不同芯片平台,相同数据类型大小的差异,如 int 的大小是 16 位,还是 32 位。
/* exact-width signed integer types */
typedef signed char int8_t;
typedef signed short int int16_t;
typedef signed int int32_t;
typedef signed __int64 int64_t;
/* exact-width unsigned integer types */
typedef unsigned char uint8_t;
typedef unsigned short int uint16_t;
typedef unsigned int uint32_t;
typedef unsigned __int64 uint64_t; 2.startup启动文件
startup/arm 这个文件夹里是启动文件 ,这里面启动文件有很多个,不同型号的STM32控制器用的启动文件不一样,这个以前我们在前面章节《第10章.创建MDK工程-寄存器版》的“10.2.4 添加分组及文件”小节中已经介绍过,这里我们不再赘述。STM32F103C8T6对应的是md结尾的启动文件。
3.Stm32f10x.h
Stm32f10x.h头文件实现了片上外设的所有寄存器的映射,在内核中与之想对应的头文件是 core_cm3.h,非常重要的一个文件。
4.system_stm32f10x.c&system_stm32f10x.h
system_stm32f10x.c文件的功能是STM32的时钟配置,操作的是片上的RCC这个外设。系统在上电之后,首选会执行由汇编编写的启动文件,启动文件中的复位函数中调用的SystemInit函数就在这个文件里面定义。调用完之后,系统的时钟就被初始化成72M。
STM32F10x_StdPeriph_Driver 文件夹
STM32F10x_StdPeriph_Driver文件夹主要是外设的驱动函数,文件夹里有 inc(include 的缩写)和 src(source 的简写)两个文件夹。src 里面是每个外设的驱动源程序,inc 则是相对应的外设头文件。src 及 inc 文件夹是 ST 标准库的主要内容,每个外设对应一个.c 和.h 后缀的文件。如上一章中我们自建的 stm32f10x_gpio.c 及stm32f10x_gpio.h 文件。 这类外设文件命名都是按一定规律的:stm32f10x_XXX.c 和stm32f10x_XXX.h 文件,XXX 表示外设名称。如图12.2-3 外设驱动函数及头文件。
这两个文件夹中,misc.c 文件较为特殊,显得格格不入,这个文件提供了外设对内核中的
NVIC(中断向量控制器)的访问函数,在配置中断时,我们需要把这个文件添加到新建工程中。
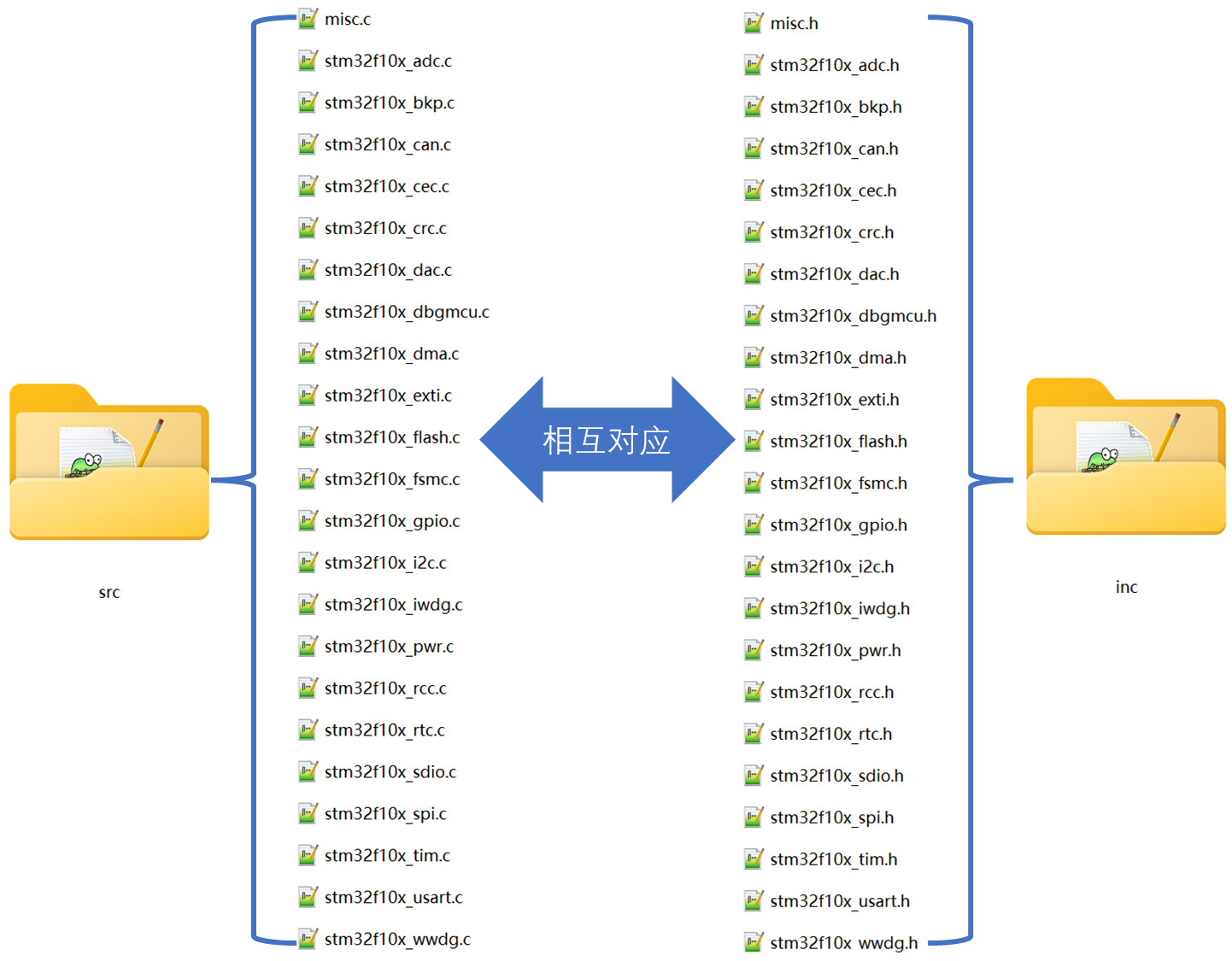
图12.2-3 外设驱动函数及头文件
stm32f10x_it.c & stm32f10x_conf.h & system_stm32f10x.c 文件
在STM32F10x_StdPeriph_Lib_V3.5.0\Project\STM32F10x_StdPeriph_Template这个文件目录下,有官方的一个库工程模板,我们后面在新建工程时 , 需 要 添 加 这 个 目 录 下 的4个文件: stm32f10x_it.c 、 stm32f10x_it.h 、 stm32f10x_conf.h 和system_stm32f10x.c。
stm32f10x_it.c:这个文件是专门用来编写中断服务函数的,这个文件已经定义了一些系统异常(特殊中断)的接口,其它普通中断服务函数由我们自己添加编写。
system_stm32f10x.c前面已经讲过,此处略过。
stm32f10x_conf.h主要是用来将所有外设的头文件集中起来。这个文件被包含进 stm32f10x.h 文件。当我们使用固件库编程的时候,如果需要某个外设的驱动库,就需要包含该外设的头文件stm32f10x_XXX.h,如果用了很多外设,就需要包含很多头文件,这确实很麻烦。我们用一个头文件stm32f10x_conf.h 把这些外设的头文件都包含在里面,我们会只用包含这一个头文件,就可以把所有外设的头文件包含进来。Stm32f10x_conf.h 见代码如下。默认情况下是所有头文件都被包含进来。我们当然也可以把不需要的注释掉。
#include "stm32f10x_adc.h"
#include "stm32f10x_bkp.h"
#include "stm32f10x_can.h"
#include "stm32f10x_cec.h"
#include "stm32f10x_crc.h"
#include "stm32f10x_dac.h"
#include "stm32f10x_dbgmcu.h"
#include "stm32f10x_dma.h"
#include "stm32f10x_exti.h"
#include "stm32f10x_flash.h"
#include "stm32f10x_fsmc.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_i2c.h"
#include "stm32f10x_iwdg.h"
#include "stm32f10x_pwr.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_rtc.h"
#include "stm32f10x_sdio.h"
#include "stm32f10x_spi.h"
#include "stm32f10x_tim.h"
#include "stm32f10x_usart.h"
#include "stm32f10x_wwdg.h"
#include "misc.h" 12.3 库文件之间的关系
各个文件在库工程中的层次关系,对应到 CMSIS 标准架构上见图 12.3-1。这里引用自野火的开发指导手册。
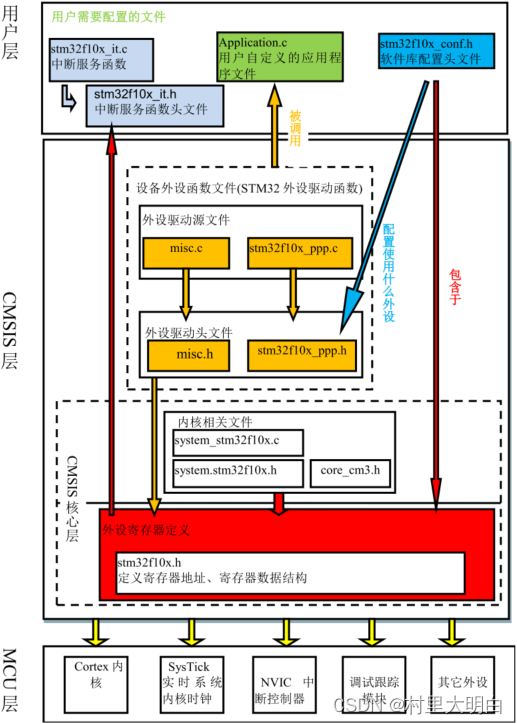
图 12.3-1 STM32库文件关系图【引自:野火开发手册】
第13章.创建MDK工程-基于标准库版
上节我们介绍了STM32的标准库,现在我们就可以基于标准库来建立工程了。基于标准库的模版比较固定,而且还是稍微有点麻烦的。所以我们经常是建立一个空的工程模版,后面开发的时候直接复制工程模板进行开发。现在我们就一步步的操作一下。
13.1 新建本地工程文件夹
在本地我们新建文件夹“Led_StdLibVersion”用于存放工程。然后新建4个文件夹:“Doc”,“StdLibrary”,” System”,”User”,如图13.1-1所示。当然这个不是固定的,按自己的喜好建立即可,只要文件夹清晰,一看文件夹就知道作用是干什么的就行了。
图13.1-1 新建文件夹目录
下面针对每个文件夹需要放的文件进行说明:
Doc文件夹:
用来存放程序相关的说明文件,比如程序怎么使用,注意事项等等。
StdLibrary文件夹:
主要是把外设相关的库函数放入,即\Libraries\STM32F10x_StdPeriph_Driver下inc和src两个文件夹下的所有文件。如图13.1-2.
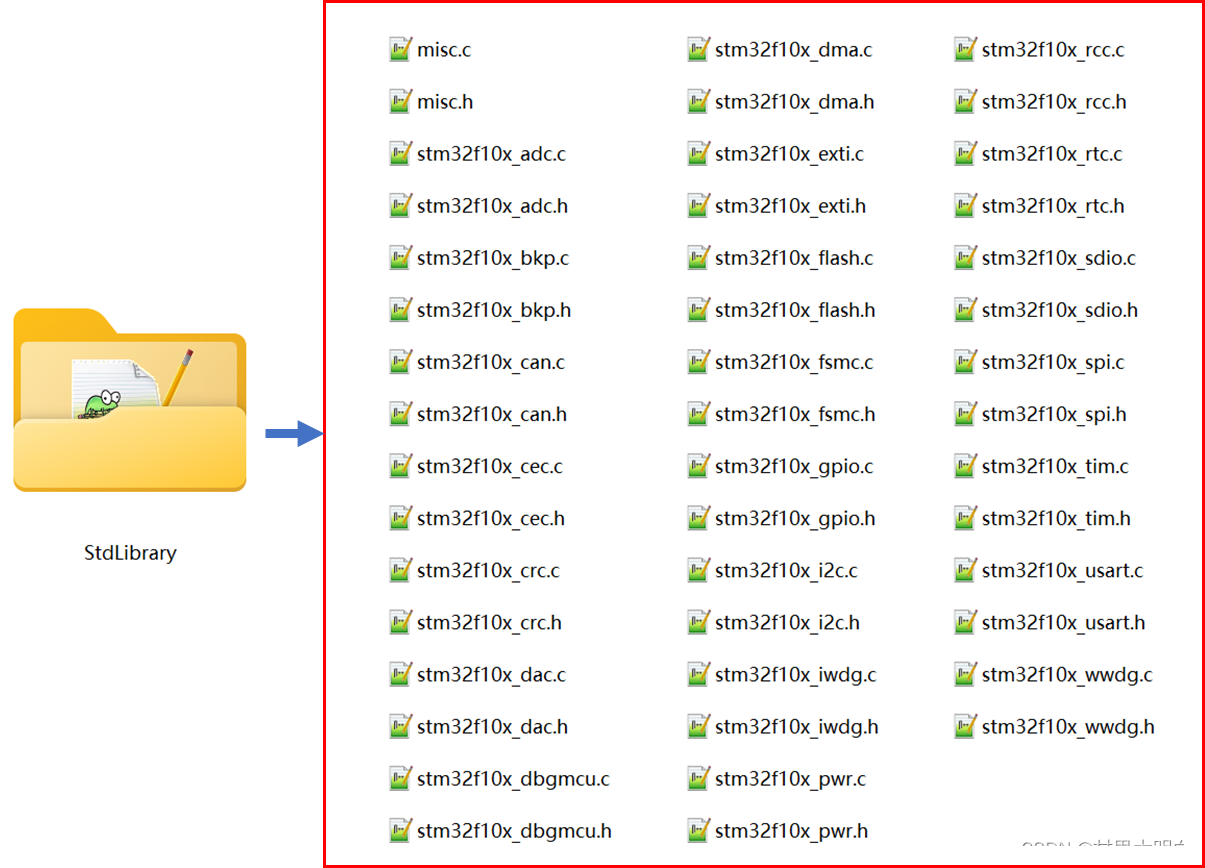
图13.1-2 StdLibrary文件夹
System文件:
放入系统相关的文件,包含启动,内核及外设的寄存器映射,系统时钟配置等核心函数。主要是STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3中的文件:core_cm3.c, core_cm3.h, stm32f10x.h, system_stm32f10x.c, system_stm32f10x.h以及启动汇编文件startup_stm32f10x_md.s(注意,不同型号的启动文件不一样,md的是STM32F103C8T6型号的,选择方法前面章节有介绍,这里不再赘述。)如图13.1-3.
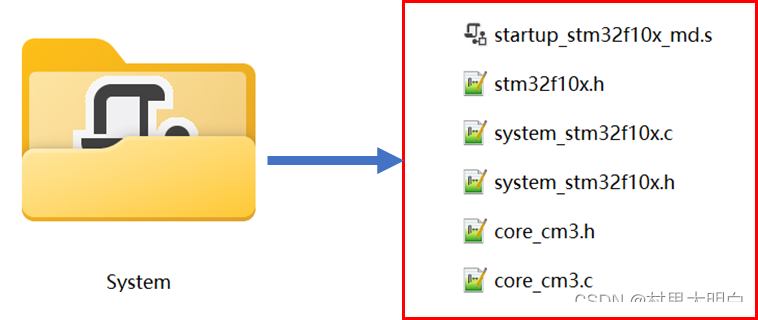
图13.1-3 system文件夹
User文件夹:
存放用户编写的函数,如main.c,以及中断服务函数system_stm32f10x.c, system_stm32f10x.h以及stm32f10x_conf.h。如图13.1-4.
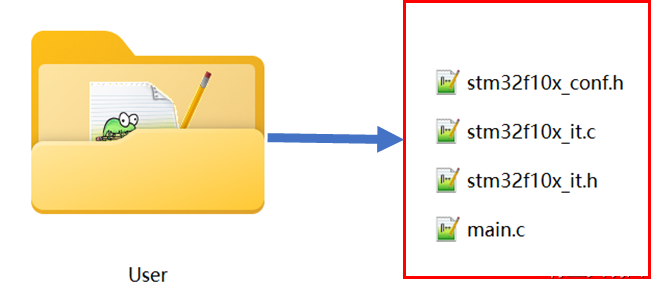
图13.1-4 User文件夹
13.2 新建工程
13.2.1 新建工程
在我们新建的“Led_StdLibVersion”文件夹下新建工程,命名“project”。这个过程前面讲解过,这里不再赘述
13.2.2 新建组
我们新建3个组,和我们新建的文件夹同名:“StdLibrary”,” System”,”User”。如图13.2-1所示。

图13.2-1 新建组
13.2-3 添加文件
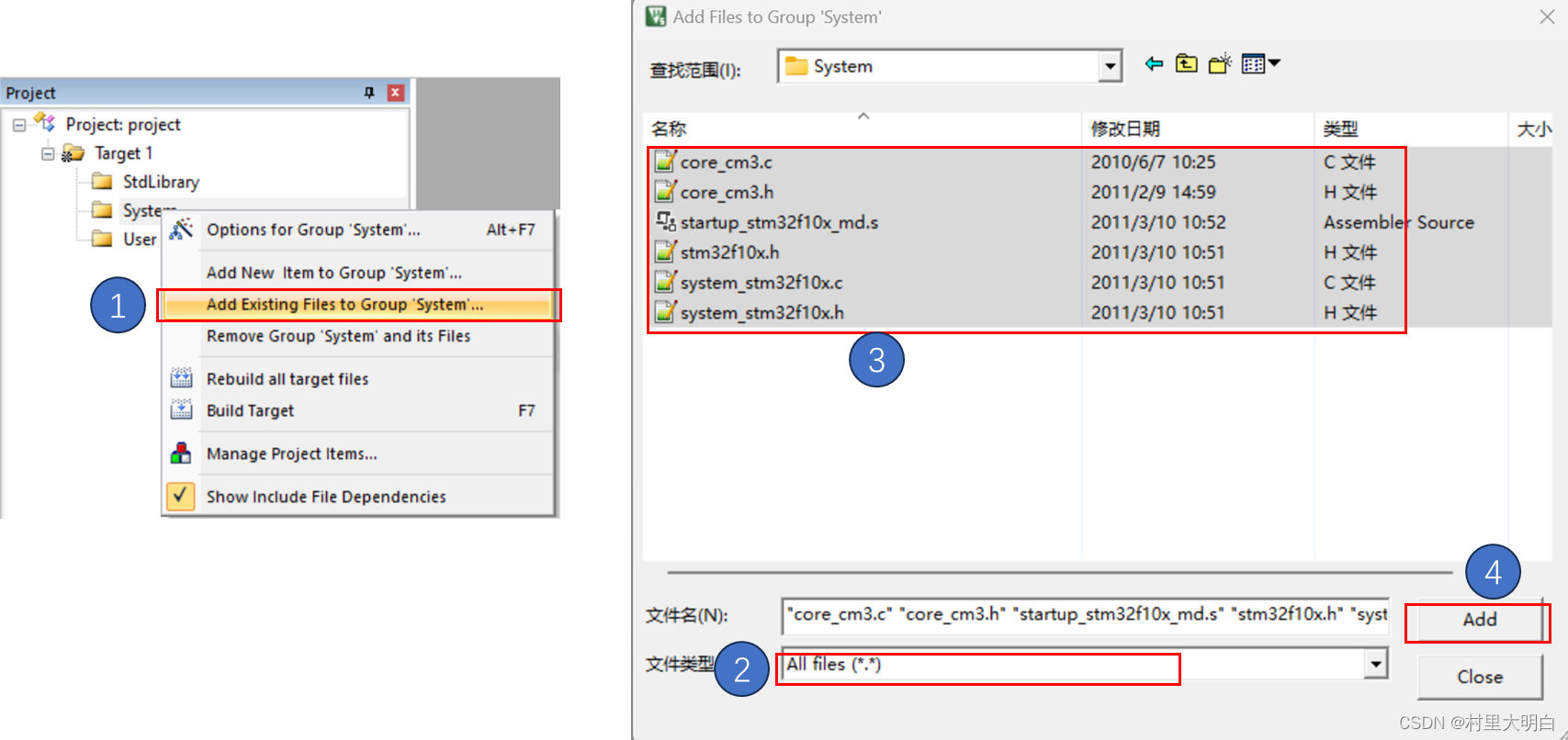
图13.2-2 添加文件
如上图所示,将同名文件夹下的文件,全部添加到MDK的同名组中。添加完成后如图13.2-3所示。
13.3 配置魔术棒选项卡
13.3.1 Output 选项卡
在Output 选项卡中把输出文件夹定位可以定位到指定文件夹,这里我一般习惯默认系统自动生成的文件夹object,这一步可不用操作。如果想在编译的过程中生成 hex 文件,可以把 Create HEX File 选项勾上。如下图:
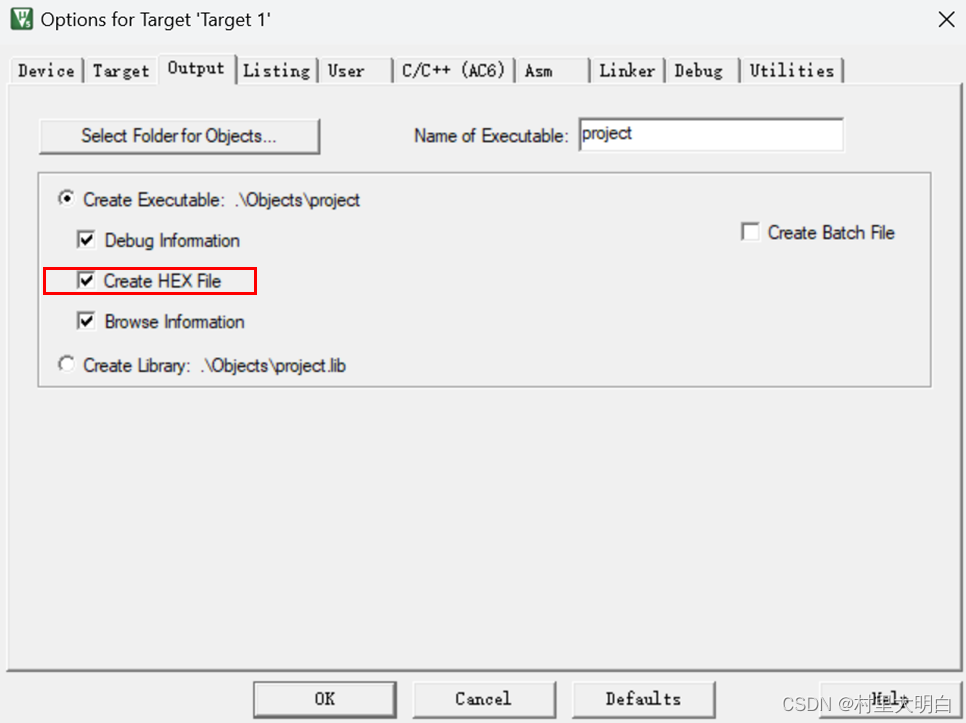
图13.3-1 output选项卡

图13.3-2 工程组添加文件后
13.3.2 C/C++选项配置
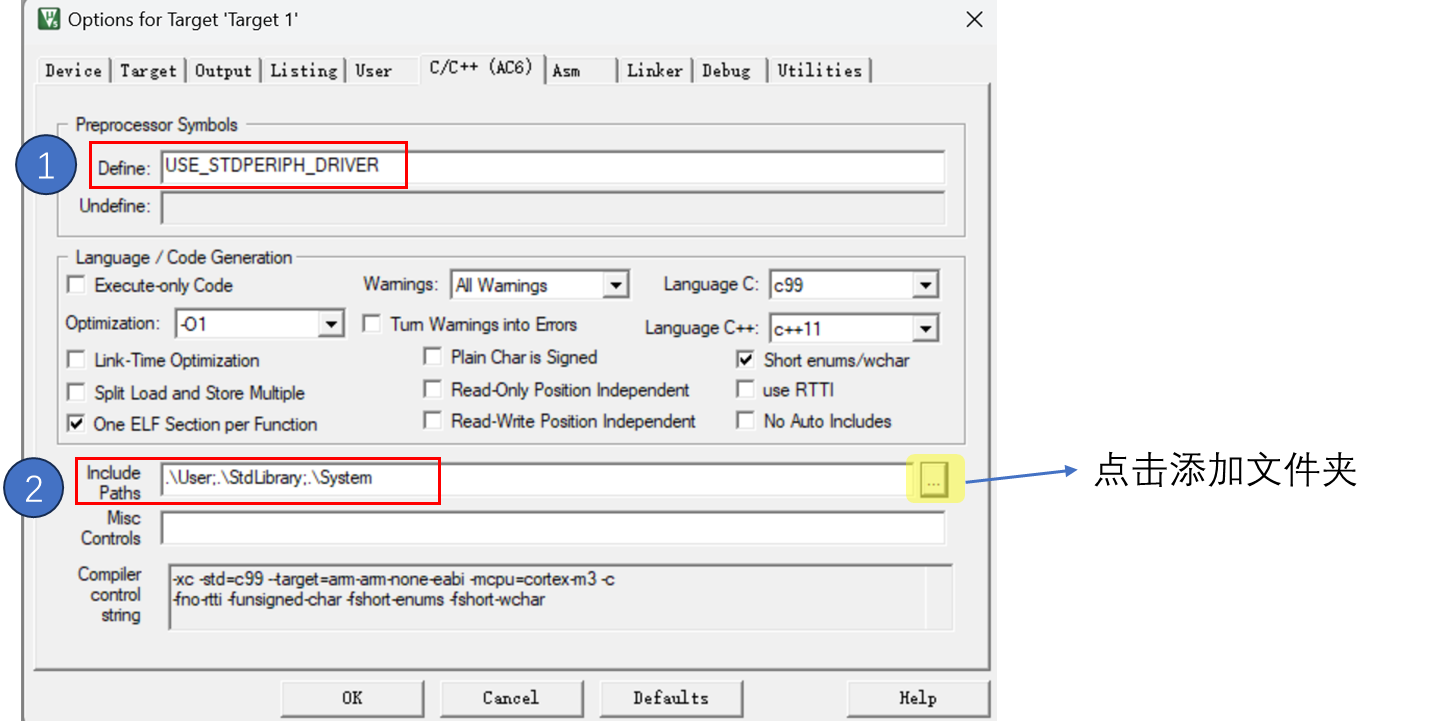
图13.3-3 C/C++选项卡设置
如上图,C/C++选项开主要配置2个地方:
①Define配置:
在这个选项中添加宏,就相当于我们在程序中使用“#define”定义宏的效果是一样的。但是如果放在编译器中添加这个宏,优势就是后面我们新建工程的时候只要用了这个模版,就不用再在程序文件中修改代码。在上图Define位置我们需要输入:USE_STDPERIPH_DRIVER。目的就是为了让stm32f10x.h包含stm32f10x_conf.h头文件,把所有外设都包含进来。stm32f10x.h相关代码如下图13.3-4:
图13.3-4 stm32f10x.h代码设计外设包含部分
②Include Paths:
此处添加的头文件的路径,没有这一步编译的时候会报错提示找不到头文件。头文件放到了哪个文件夹,我们就把该文件夹添加到这里。
13.3.3 Dubug选项配置
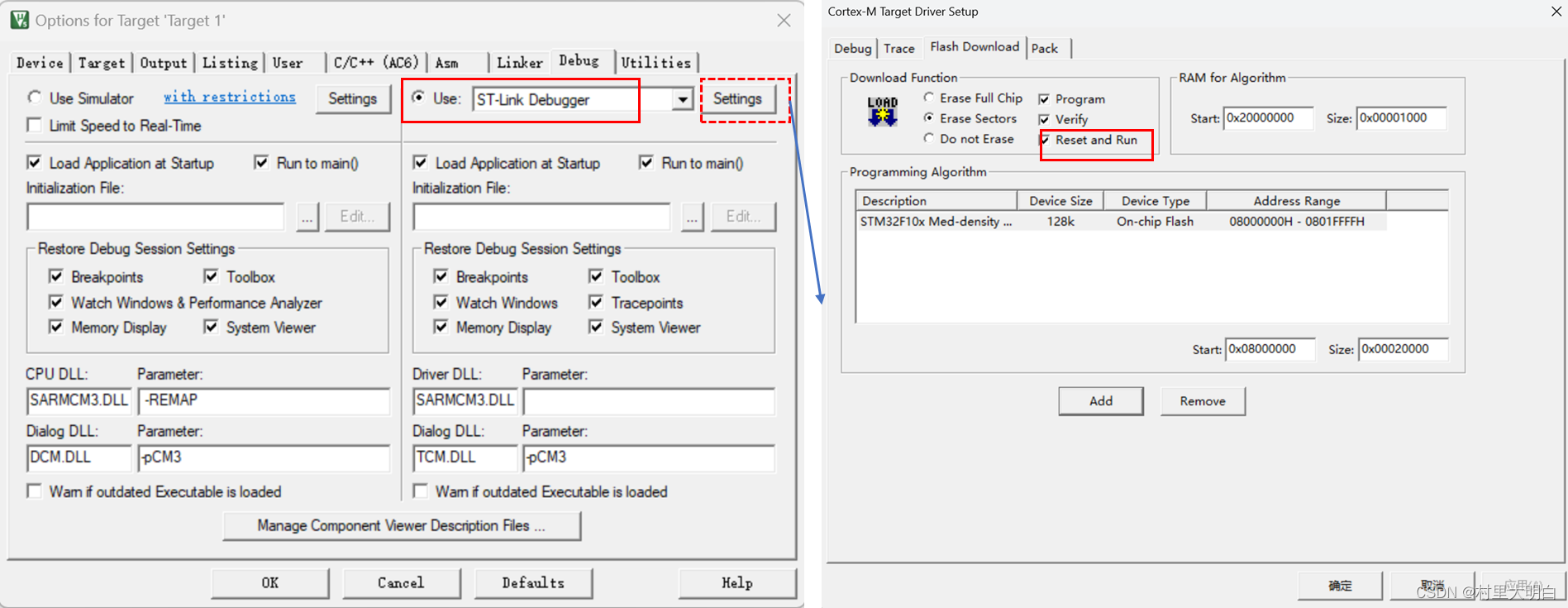
图13.3-5 Debug选项卡配置
下拉列表选择对应调试器,Settings/Flash Download里勾选Reset and Run。这个前面讲过,就不再赘述。
13.4 使用标准库点亮LED
为区别前面2种点亮LED的方式,本次我们LED连接PB10这个IO口。
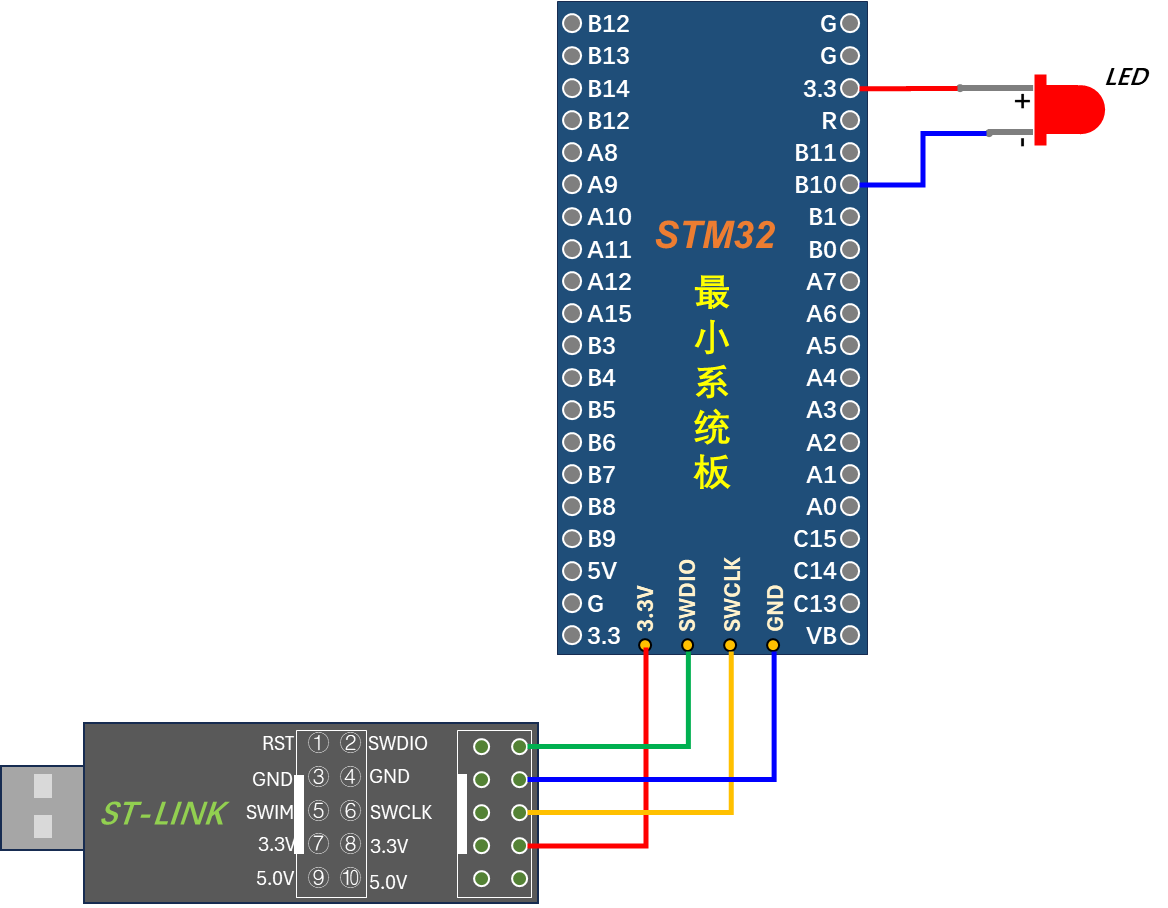
图13.4-1 简易接线图
代码如下:
#include "stm32f10x.h" // Device header
int main(void)
{
//开启APB2,GPIOB外设时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
//初始化
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//开启PB2
GPIO_ResetBits(GPIOB,GPIO_Pin_2);
while (1)
{
}
}
第14章. GPIO简介
从本章开始我们就要开始外设等相关模块的介绍。 我们首先要介绍的就是GPIO,因为我认为GPIO是最基础也是最重要的一个外设功能。那么后续针对每一个外设,我们大致都会从下面几个部分进行讲解:
1.硬件结构及原理
2.相关寄存器
3.相关库函数
4.实例练习
14.1 GPIO基本结构
GPIO 有八种工作模式,为讲清楚这些模式的实现原理,我们需要先讲解GPIO的基本结构,总的框图如图14.1-1所示。右边I/O 引脚就是我们可以看到的芯片实物的引脚,其余部分均为GPIO 的内部结构。

图14.1-1 GPIO的基本结构图
14.1.1 保护二极管
引脚的两个保护二级管可以防止引脚外部过高或过低的电压输入,当引脚电压高于VDD 时,上方的二极管导通,当引脚电压低于 VSS 时,下方的二极管导通,防止不正常电压引入芯片导致芯片烧毁。 虽然有二极管的保护,但这样的保护却很有限,大电压大电流的接入很容易烧坏芯片。
14.1.2 上拉、下拉电阻
上下拉电阻的阻值大概在30~50K欧之间,可以通过上、下两个对应的寄存器控制开关。当引脚外部的器件没有干扰引脚的电压时,即没有外部的上、下拉电压,引脚的电平由引脚内部上、下拉决定。内部上拉电阻工作时引脚电平为高电平,内部下拉电阻工作时,则引脚电平为低电平。如果内部上、下拉电阻都不开启,这种情况就是浮空模式。浮空模式下引脚的电平是不可确定的。引脚的电平可以由外部的上、下拉电平决定。由于上下拉电阻的阻值较大,STM32的内部上拉是一种“弱上拉”,这样的上拉电流很弱,如果有要求大电流还是得外部上拉。
14.1.3 施密特触发器
图中的TTL肖特基触发器即为施密特触发器,当输入电压高于正向阈值电压,输出为高;当输入电压低于负向阈值电压,输出为低;当输入在正负向阈值电压之间,输出不改变。也就是说输出由高电平翻转为低电平,或是由低电平翻转为高电电平对应的阈值电压是不同的。只有当输入电压发生足够的变化时,输出才会变化,因此将这种元件命名为触发器。这种双阈值动作被称为迟滞现象。我们软件开发种经常用到“滞环调节”,是一个道理,一个经常的应用场景是防止在边界附近来回震荡。施密特触发器可作为波形整形电路,能将模拟信号波形整形为数字电路能够处理的方波信号。
14.1.4 P-MOS 管和 N-MOS 管
这种双MOS管结构,主要控制GPIO的开漏输出和推挽输出两种模式。这里我们只用记住,PMOS输入低电平时导通,NMOS输入高电平时导通即可。详细内容,后面还会介绍。
14.1.5 输出数据寄存器
刚提到的双MOS管结构电路的输入信号,是由GPIO“输出数据寄存器GPIOx_ODR”提供的,因此我们通过修改输出数据寄存器的值就可以修改GPIO引脚的输出电平。也可以通过“置位/复位寄存器GPIOx_BSRR”修改输出数据寄存器的值,来控制电路的输出。
14.1.6 输入数据寄存器
GPIO引脚经过内部的上、下拉电阻,可以配置成上/下拉输入,然后再连接到施密特触发器,信号经过触发器后,模拟信号转化为0、1的数字信号,然后存储在“输入数据寄存器GPIOx_IDR”中,通过读取该寄存器就可以了解GPIO引脚的电平状态。
14.2 GPIO工作模式
GPIO有八种工作模式,分别如下,我们把这些模式按输入,输出和复用功能3个大类进行描述。
1、输入浮空
2、输入上拉
3、输入下拉
4、模拟输入
5、开漏输出
6、推挽输出
7、开漏式复用功能
8、推挽式复用功能
14.2.1 输入模式
在输入模式时,施密特触发器打开,输出被禁止,可通过输入数据寄存器GPIOx_IDR读取I/O状态。其中输入模式,可设置为上拉、下拉、浮空和模拟输入四种。
14.2.1.1 输入浮空模式
上拉/下拉电阻为断开状态,施密特触发器打开,输出被禁止。输入浮空模式下,IO口的电平完全是由外部电路决定。如果IO引脚没有连接其他的设备,那么检测其输入电平是不确定的。该模式通常用于按键检测等场景。
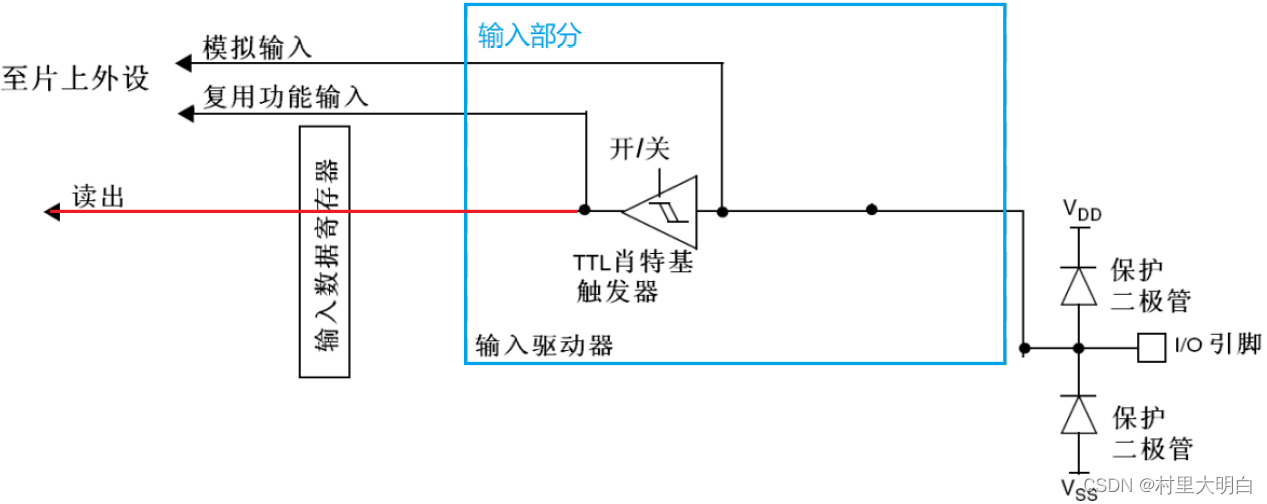
图14.2-1 输入浮空模式
14.2.1.2 输入上拉模式
上拉电阻导通,施密特触发器打开,输出被禁止。在需要外部上拉电阻的时候,可以使用内部上拉电阻,这样可以节省一个外部电阻,但是内部上拉电阻的阻值较大,所以只是“弱上拉”,不适合做电流型驱动。
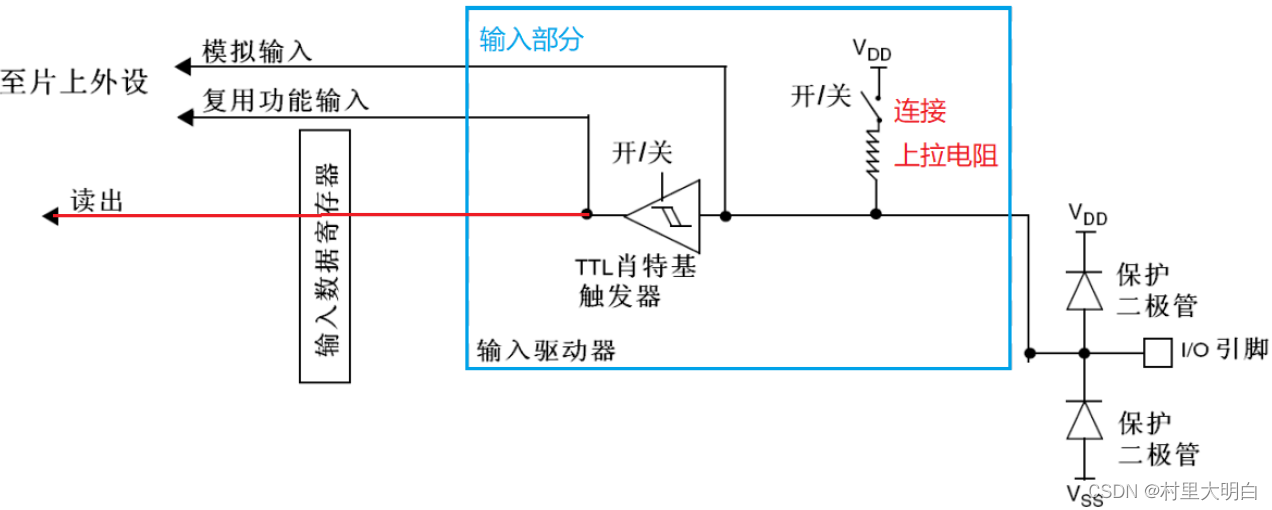
图14.2-2 输入上拉模式
14.2.1.3 输入下拉模式
下拉电阻导通,施密特触发器打开,输出被禁止。在需要外部下拉电阻的时候,可以使用内部下拉电阻,这样可以节省一个外部电阻,但是内部下拉电阻的阻值较大,所以不适合做电流型驱动。
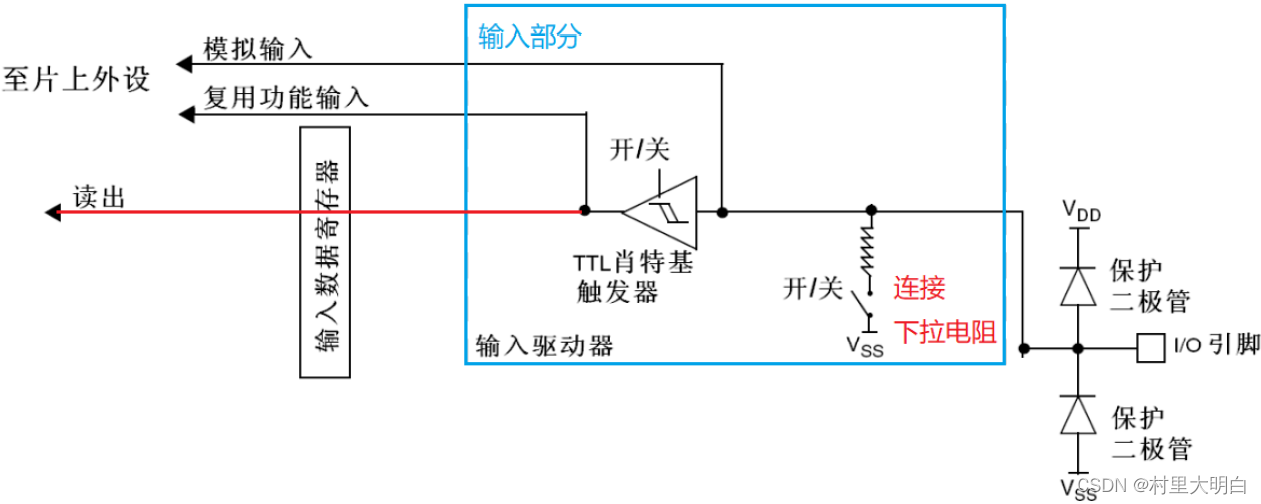
图14.2-3 输入上拉模式
14.2.1.4 模拟输入模式
此模式下上下拉电阻断开,施密特触发器关闭,双 MOS 管也关闭。其他外设可以通过模拟通道输入输出。该模式下需要用到芯片内部的模拟电路单元单元,用于ADC/DAC等操作模拟信号的外设。
当GPIO引脚用于ADC采集电压的输入通道时,用作“模拟输入”功能,此时信号是不经过施密特触发器的,因为经过施密特触发器后信号只有0、1两种状态,所以ADC外设要采集到原始的模拟信号,信号源输入必须在施密特触发器之前。同样,当GPIO引脚用于DAC作为模拟电压输出通道时,此时作为“模拟输出”功能,DAC的模拟信号输出就不经过双MOS管结构,模拟信号直接输出到引脚。
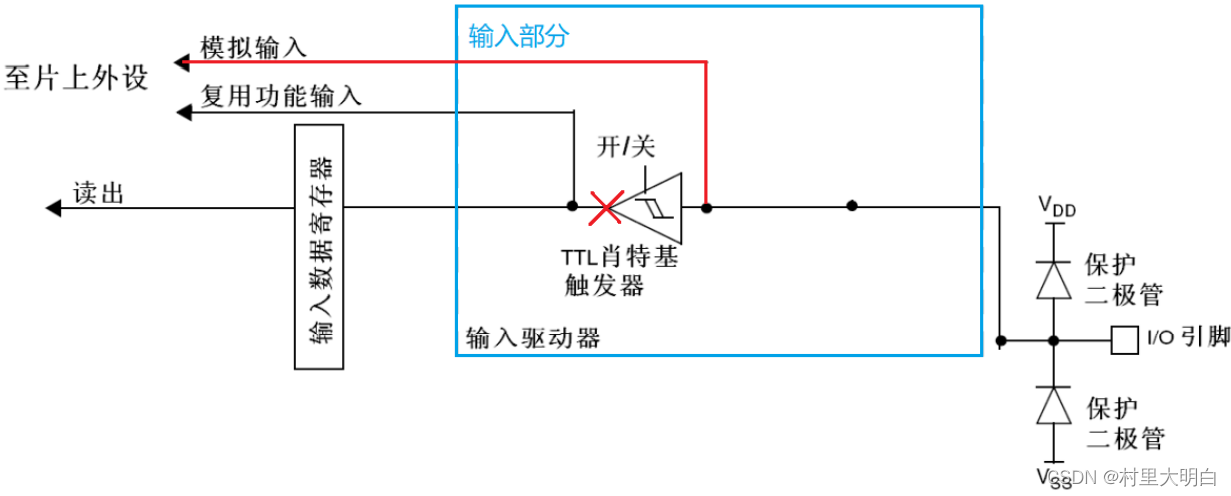
图14.2-4 模拟输入模式
14.2.2 输出模式
输出模式主要是由双MOS管的开闭控制来实现的,画了一个示意图,如图14.2-5所示。在输出模式中,推挽模式时双MOS管以轮流方式工作,输出数据寄存器GPIOx_ODR可控制I/O输出高低电平。开漏模式时,只有N-MOS管工作,输出数据寄存器可控制I/O输出高阻态或低电平。输出速度可配置,有2MHz\10MHz\50MHz的选项。此处的输出速度即I/O支持的高低电平状态最高切换频率,支持的频率越高,功耗越大,如果功耗要求不严格,把速度设置成最大即可。
在输出模式时施密特触发器是打开的,即可通过输入数据寄存器GPIOx_IDR可读取I/O的实际状态。
下面我们分别进行介绍。
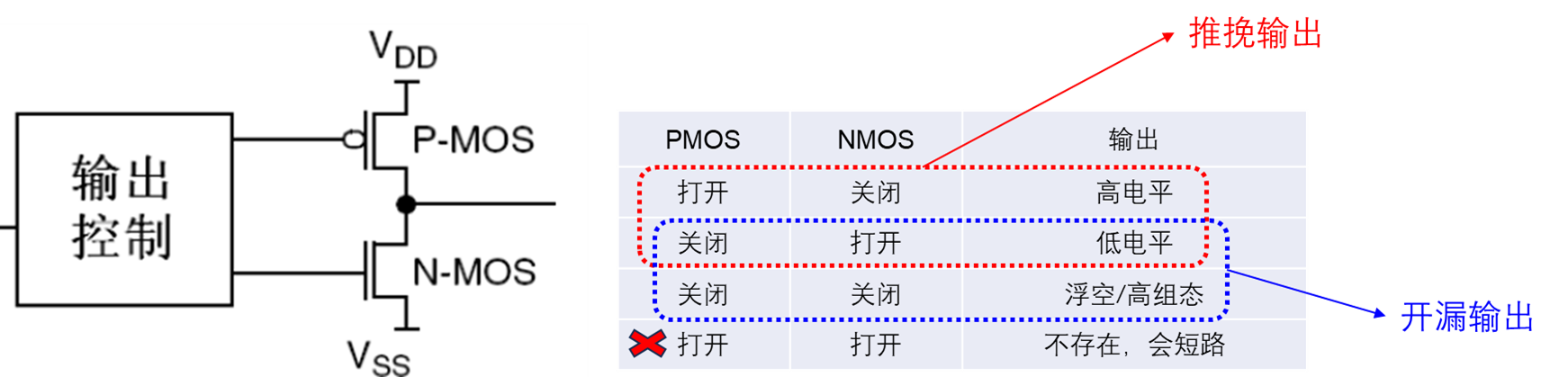
图14.2-5 输出模式控制示意图
14.2.2.1 推挽输出模式
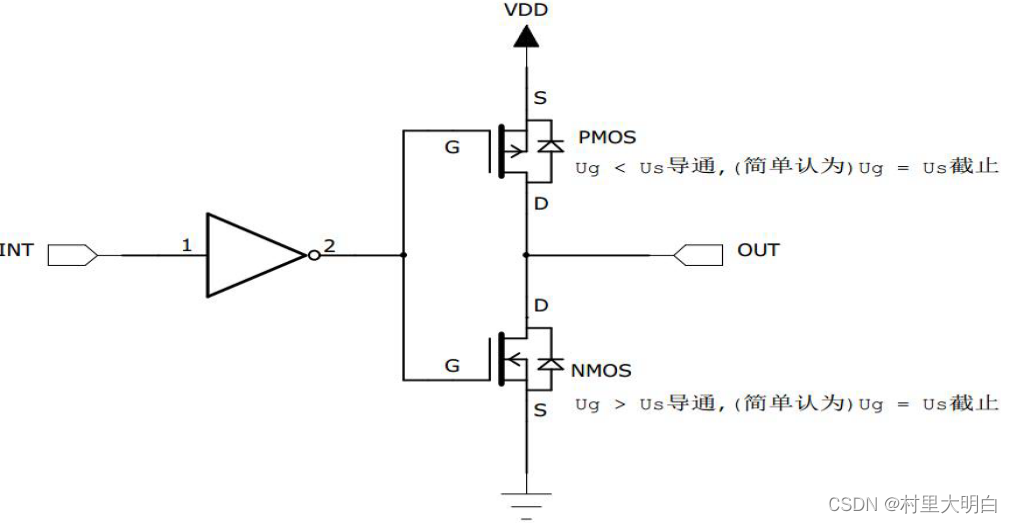
图14.2-6 推挽模式等效电路
推挽输出模式,是根据这两个MOS管的工作方式来命名的。在该结构中输入高电平时,经过反向后,上方的P-MOS导通,下方的N-MOS关闭,对外输出高电平;而在该结构中输入低电平时,经过反向后,N-MOS管导通,P-MOS关闭,对外输出低电平。当引脚高低电平切换时,两个管子轮流导通,PMOS管负责灌电流-“推”,NMOS管负责拉电流-“挽”,使其负载能力和开关速度都比普通的方式有很大的提高。推挽输出的低电平为0伏,高电平为3.3伏,如上图所示推挽输出模式时的等效电路。
由于推挽输出模式下输出高电平时,是直接连接 V DD ,所以驱动能力较强,可以做电流型驱动,驱动电流最大可达 25mA,但是芯片的总电流有限,所以并不建议这样用,最好还是使用芯片外部的电源。
14.2.2.2 开漏输出模式
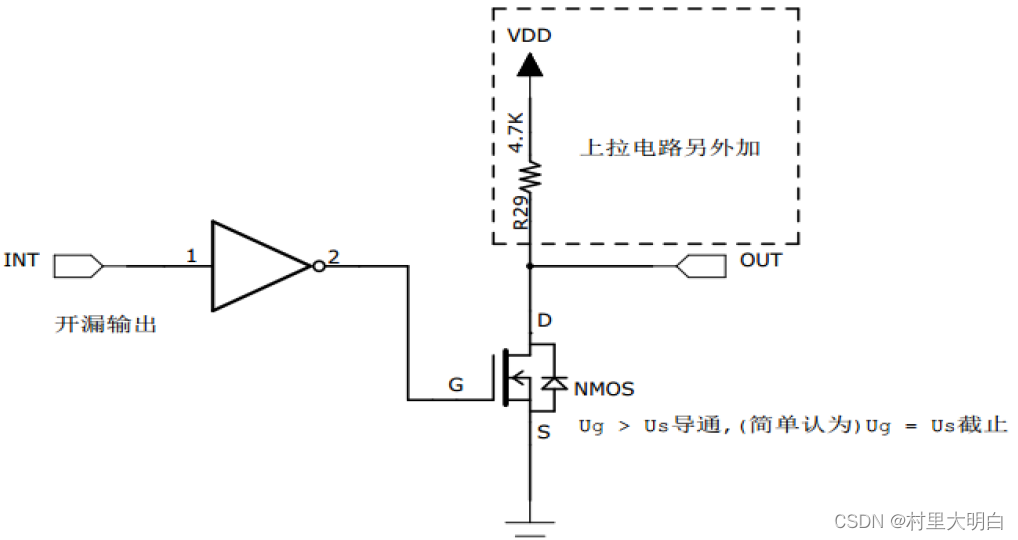
图14.2-7 开漏输出等效电路
在开漏输出模式时,上方的P-MOS管完全不工作。如果我们控制输出为0低电平,N-MOS管导通,使输出接地,若控制输出为1(它无法直接输出高电平)时,则P-MOS管和N-MOS管都关闭,所以引脚既不输出高电平,也不输出低电平,为高阻态。为正常使用时必须外部接上拉电阻,等效电路如上图。它具有“线与”特性,也就是说,若有很多个开漏模式引脚连接到一起时,只有当所有引脚都输出高阻态,才由上拉电阻提供高电平,此高电平的电压为外部上拉电阻所接的电源的电压。若其中一个引脚为低电平,那线路就相当于短路接地,使得整条线路都为低电平0。
那么开漏输出模式的应用场景是什么的?总结下来主要有2个:
1.电平不匹配的场合
STM32输出的高电平是3.3V,如果外部需要更高或者更低的电压,那么推挽输出就不合适了。此时就可以在外部接一个上拉电阻,上拉电源为外部需要的电压,如5V,并且把GPIO设置为开漏模式,当输出高阻态时,由上拉电阻和电源向外输出5伏的电平,输出低电平时则输出低电平0V,如图14.2-8。
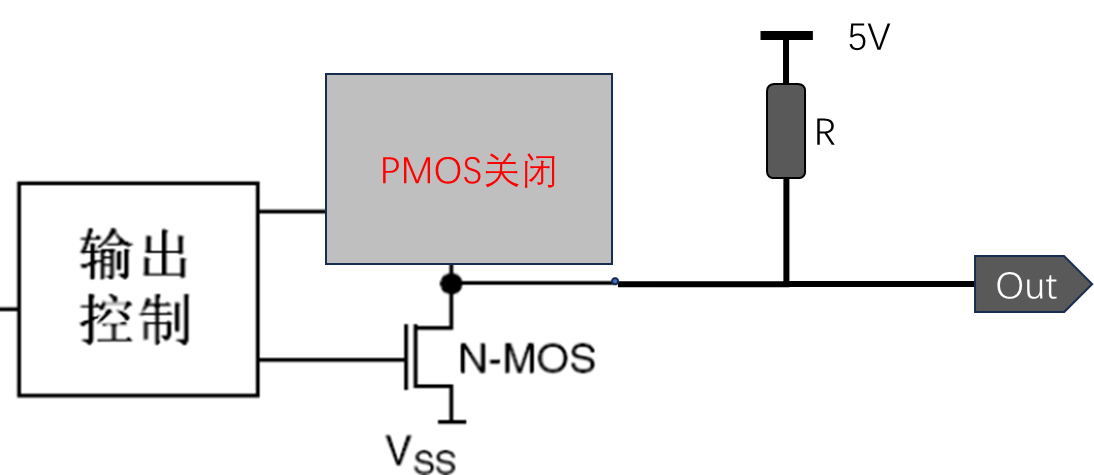
图14.2-8 开漏模式输出5V电压
2.需要“线与”功能的总线电路
如 I2C通讯等需要“线与”功能的总线电路中一般要用开漏模式。多个控制器全部输入1高阻态时则为1,只要有一个为低电平,那么整个电路就是0.此时推挽输出模式就不可以了,因为有的控制器输入1,PMOS导通,有的控制器输入0,NMOS导通,此时双MOS管都存在导通的情况,直接就短路了。
14.2.3 复用功能
复用功能模式中,输出使能,输出速度可配置,可工作在开漏复用及推挽复用两种模式,但是输出信号源于其它外设,不再是ODR寄存器,输出数据寄存器GPIOx_ODR无效;此时输入可用,我们可以通过输入数据寄存器可获取I/O实际状态。但一般情况下我们是直接用外设的寄存器来获取该数据信号。
具体这2种模式参考前面推挽/开漏输出模式即可,区别是输出信号源的差异。如下图14.2-9所示。
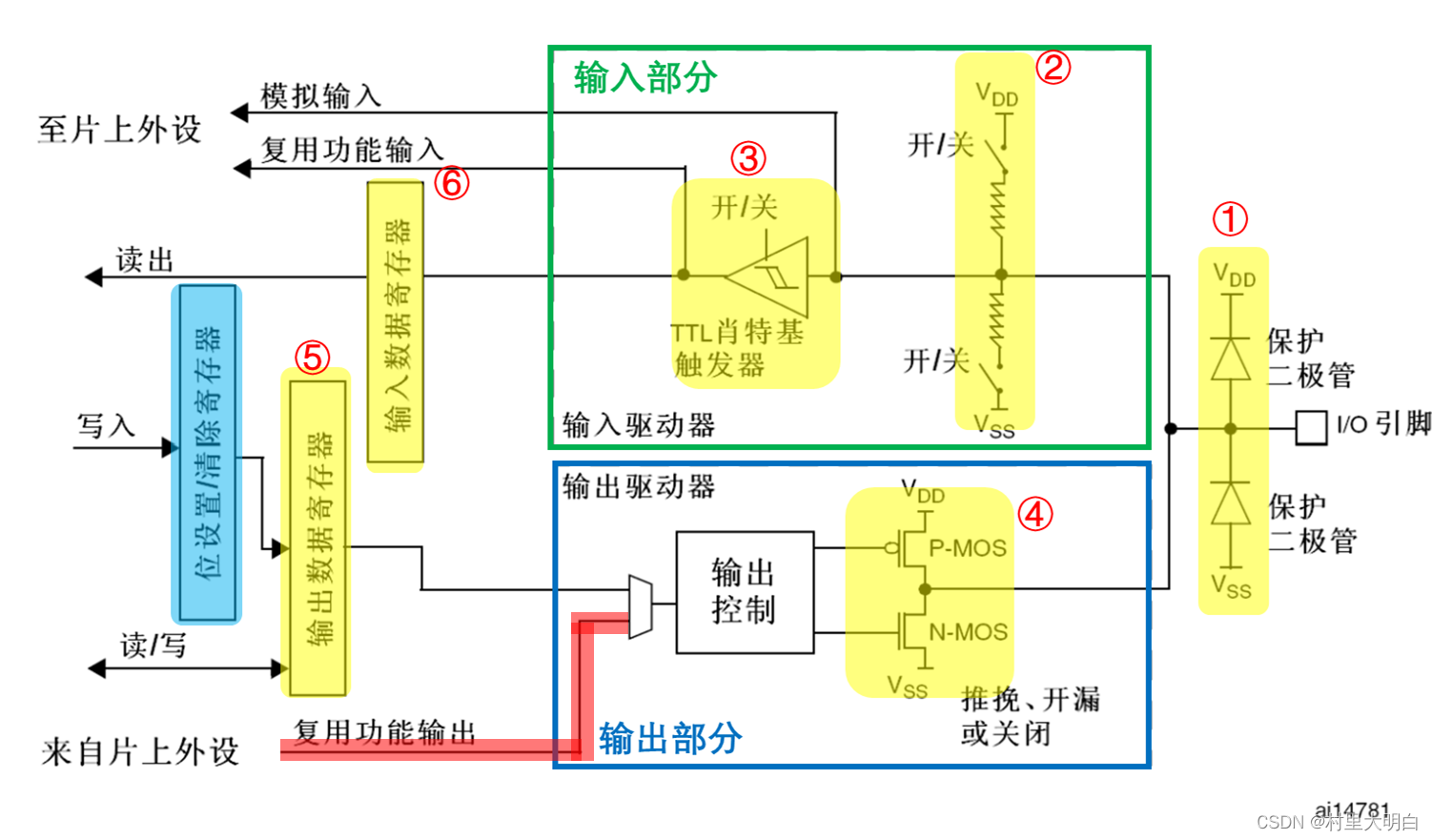
图14.2-9 复用输出模式
14.3 GPIO寄存器介绍
STM32F1每组通用GPIO口有7个32位寄存器控制,包括:
2个32位端口配置寄存器(CRL和CRH)
2个32位端口数据寄存器(IDR和ODR)
1个32位端口置位/复位寄存器(BSRR)
1个16位端口复位寄存器(BRR)
1个32位端口锁定寄存器(LCKR)
下面介绍一下主要的寄存器。大家还是要学会自己去看参考手册,寄存器太多,但原理都差不多。
14.3.1 端口配置寄存器(GPIOx_CRL 和 GPIOx_CRH)
这两个寄存器前面也已经有介绍。都是GPIO口配置寄存器,CRL控制端口的低八位,CRH控制端口的高八位。寄存器的作用是控制GPIO口的工作模式和工作速度,寄存器描述如图14.3-1和图14.3-2。
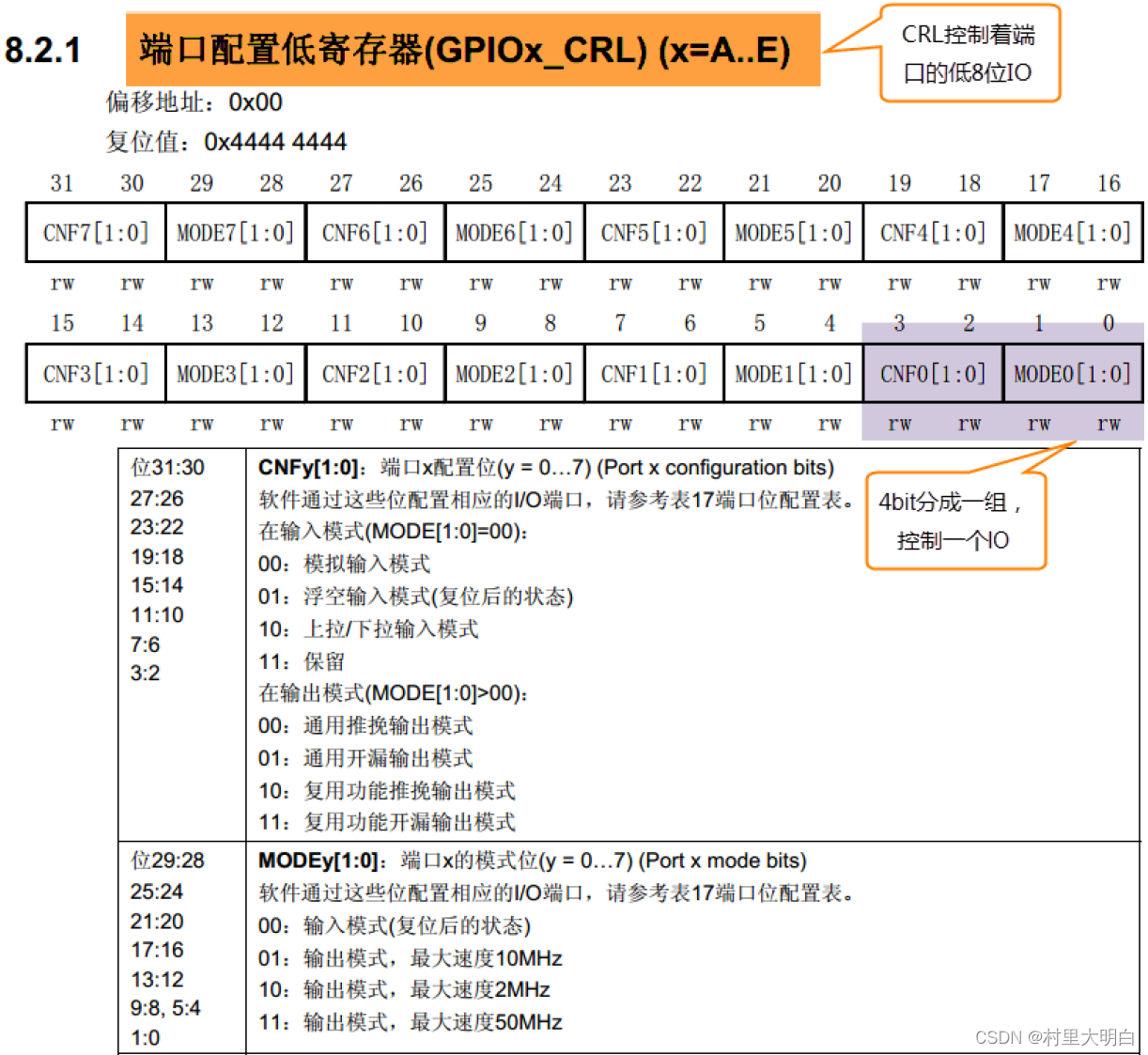
图14.3-1 CRL寄存器说明
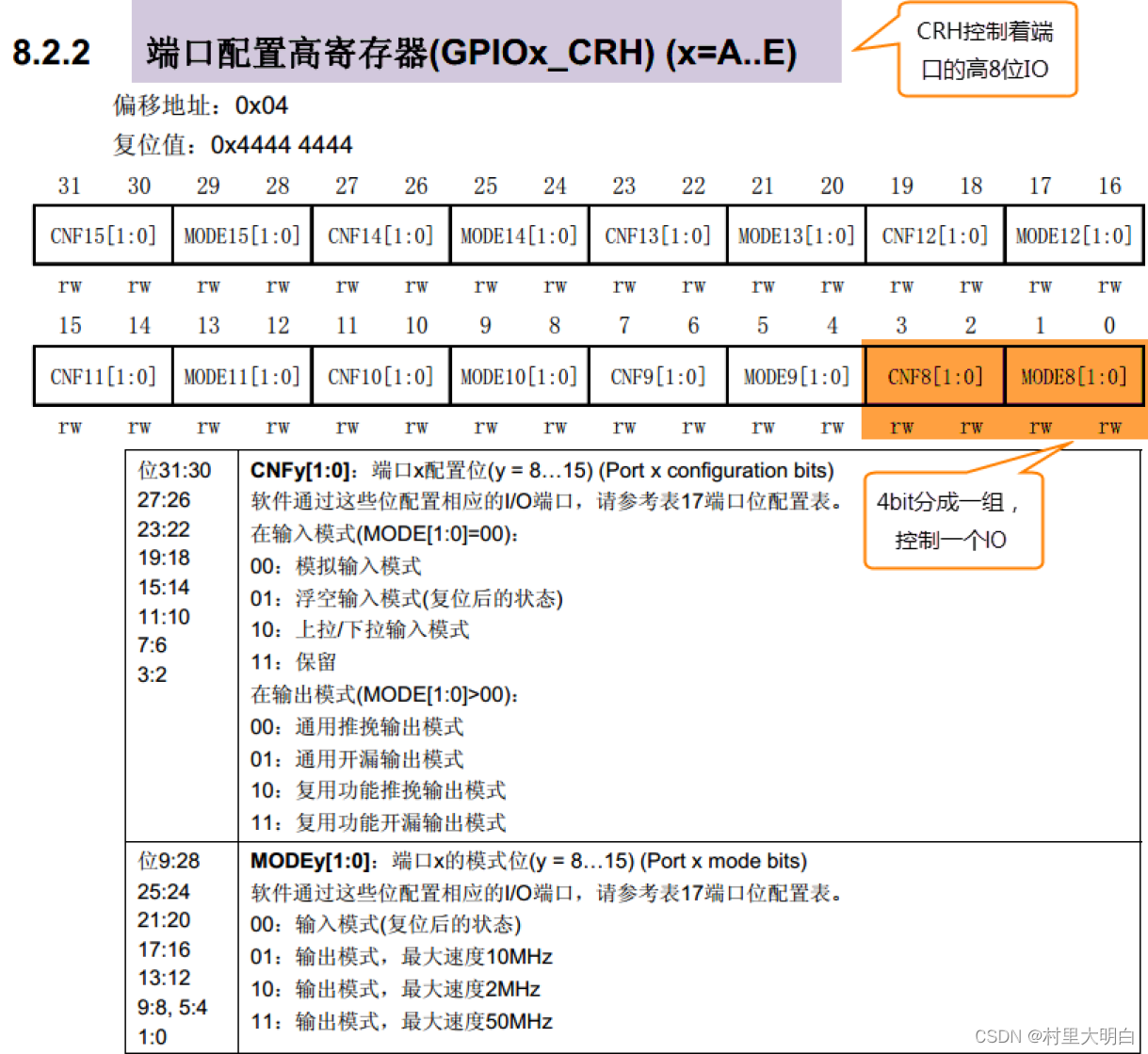
图14.3-2 CRH寄存器说明
每组GPIO有16个IO口,一个寄存器共32位,每4个位控制1个IO,所以需要两个寄存器。这个寄存器的复位值0x44444444代表什么含义?说明如下:如GPIOA_CRL的复位值是0x44444444,4位为一个单位都是0100,首先位1:0为00即是设置GPIO端口为输入模式,位3:2为01即设置为浮空输入模式。所以假如GPIOA_CRL的值是0x44444444,那么PA0~PA7都是设置为浮空输入模式。
这2个配置寄存器就是用来配置GPIO的相关工作模式和工作速度,通过不同的配置实现不同的8种工作模式。配置方式如图14.3-3.
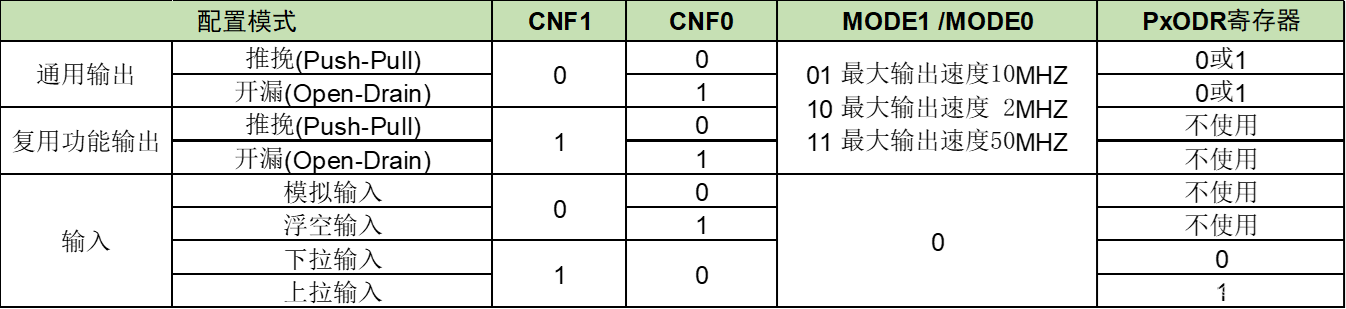
图14.3-3 GPIO配置寄存器配置说明
14.3.2 端口输出数据寄存器(GPIOx_ODR)
该寄存器用于控制 GPIOx 的输出高电平或者低电平,寄存器描述如图 14.3-4 所示。
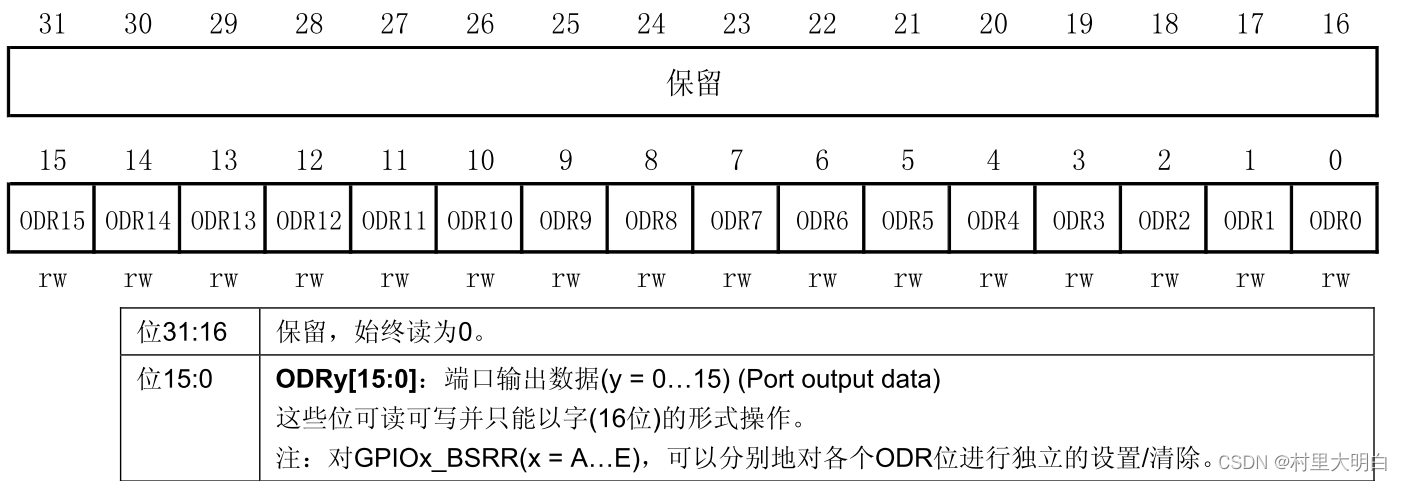
图14.3-4 ODR寄存器说明
该寄存器低16位有效,分别对应每一组GPIO的16个引脚。当CPU写访问该寄存器,如果对应的某位写0(ODRy=0),则表示设置该IO口输出的是低电平,如果写1(ODRy=1),则表示设置该IO口输出的是高电平,y=0~15。此外,除了ODR寄存器,BSRR寄存器也是用于控制GPIO输出的。
14.3.3 端口置位/复位寄存器(GPIOx_BSRR)
该寄存器也用于控制GPIOx的输出高电平或者低电平,寄存器描述如图14.3-5。
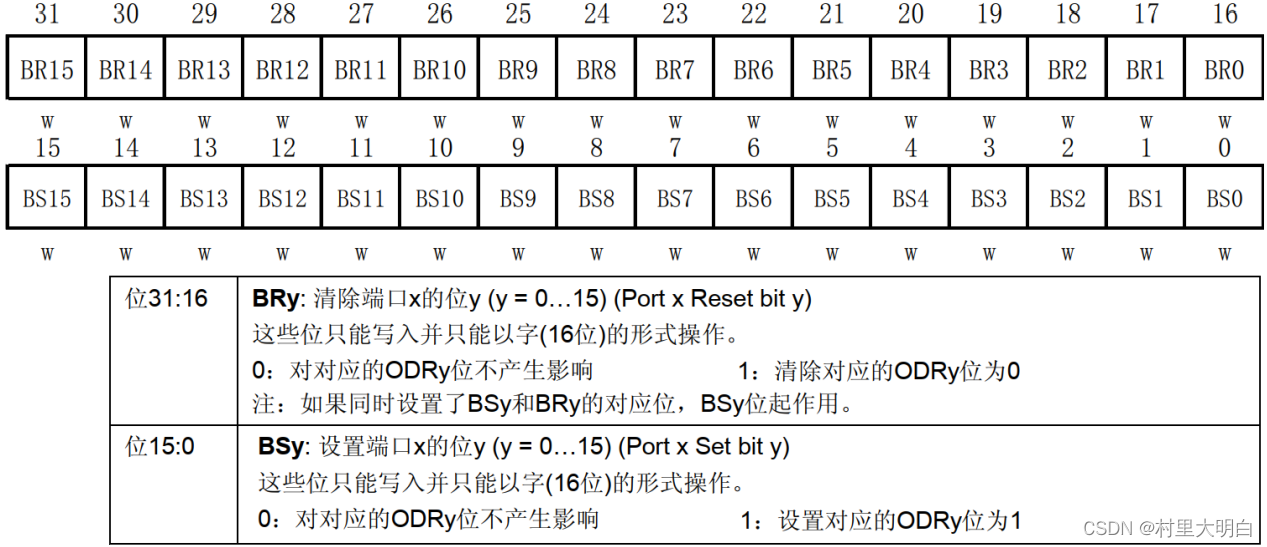
图14.3-5 BSRR寄存器说明
为什么有了ODR寄存器,还要这个BSRR寄存器呢?我们先看看BSRR的寄存器描述,首先BSRR是只写权限,而ODR是可读可写权限。BSRR寄存器32位有效,对于低16位(0-15),我们往相应的位写1(BSy=1),那么对应的IO口会输出高电平,往相应的位写0(BSy=0),对IO口没有任何影响,高16位(16-31)作用刚好相反,对相应的位写1(BRy=1)会输出低电平,写0(BRy=0)没有任何影响,y=0~15。也就是说,对于BSRR寄存器,你写0的话,对IO口电平是没有任何影响的。我们要设置某个IO口电平,只需要相关位设置为1即可。而ODR寄存器,我们要设置某个IO口电平,我们首先需要读出来ODR寄存器的值,然后对整个ODR寄存器重新赋值来达到设置某个或者某些IO口的目的,而BSRR寄存器直接设置即可,这在多任务实时操作系统中作用很大。BSRR寄存器还有一个好处,就是BSRR寄存器改变引脚状态的时候,不会被中断打断,而ODR寄存器有被中断打断的风险。
【引自:正点原子】
14.4 GPIO库函数
GPIO库函数如图14.4-1所示:

图14.4-1 GPIO库函数
具体使用方法可查看代码或者参考《STM32F103xx固件函数库用户手册》 。
14.5 应用说明
具体代码怎么写都是要看硬件怎么设计的,根据前面讲述的内容,我们以点亮LED为例,如图14.5-1.假如我们的LED不能靠3.3V点亮,是需要更高电压点亮,或者电流要求较大的时候,那我们可以设置个外部电路,并配置为开漏模式。
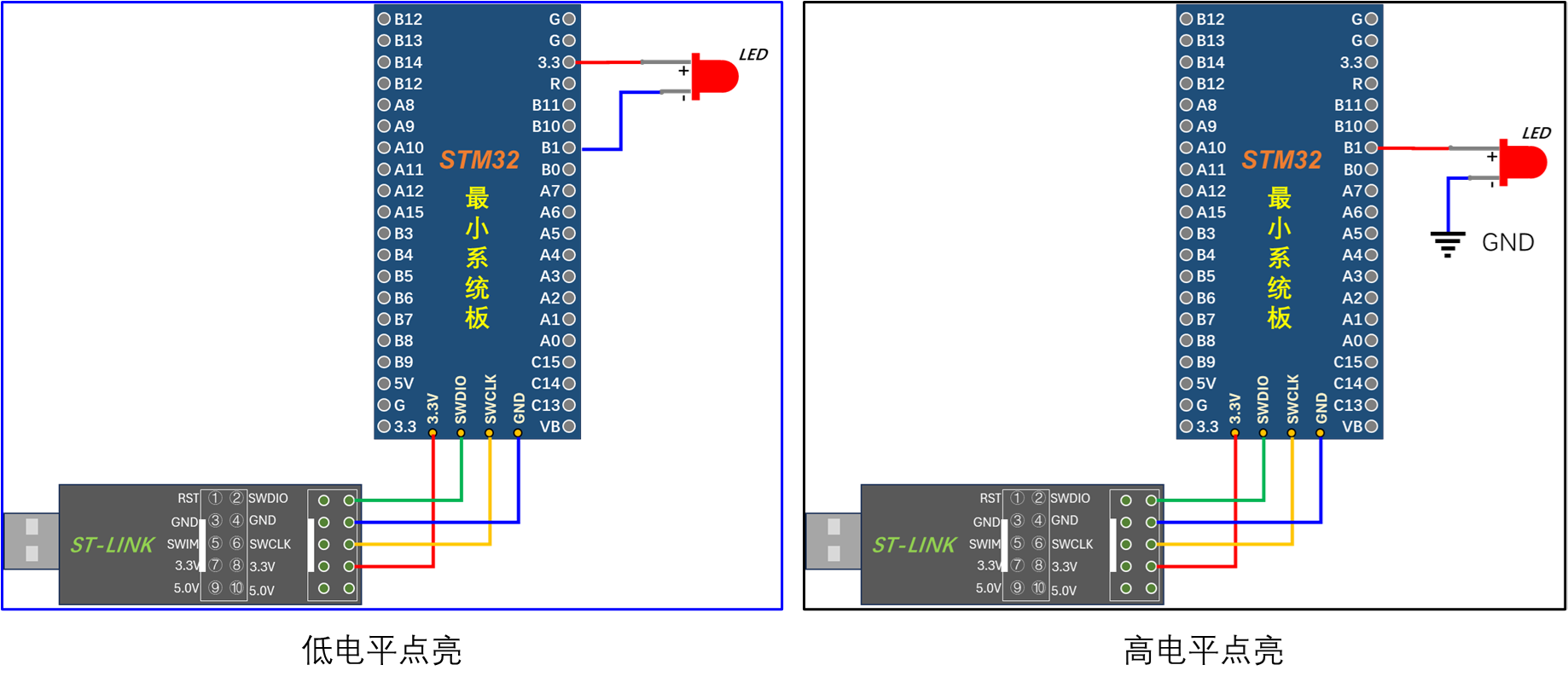
图14.5-1 LED点亮方式
第15章.GPIO输入-按键检测
本节我们学习一下GPIO的输入检测,按键检测是最常用最简单的输入检测场景。掌握了按键输入检测之后,其他的不同设备外设检测都是大同小异,触类旁通,我们更重要的是要学习这些工程开发思想和技巧。
15.1.硬件设计
15.1.1 硬件设计示意图

图15.1-1 硬件连接示意图
我们的硬件连接非常简单,PA1口接一个按键到GND,PB1控制LED灯的亮灭。我们要实现的程序现象就是,按下按键后LED灯状态进行反转,实现亮-灭控制。
15.1.2 机械按键问题
按键是机械的,在按下和松手的瞬间会伴随有一定时间的抖动,按键开关不会马上稳定接通或一下断开,使用按键时会产生图 15.1-2 中所示波浪信号,我们写程序的时候需要用软件消抖处理滤波。

图15.1-2 按键抖动说明
当然也可以设计硬件进行消抖,如果有硬件消抖,软件就不用再设计消抖处理。硬件消抖一般是利用RC电路的电容充放电特性来对抖动产生的电压毛刺进行滤波,简单示意图如图15.1-3.

图15.1-3 硬件消抖
15.2 软件设计
15.2.1 工程文件创建
目前设计的软件,要更加注重的是可移植性,所以很多软件设计里有很多封装,有很多“层层套娃”等,目的是为了软件的可移植性可重用性。一些硬件的改动,仅仅需要软件配置上做一定适配,软件就能用,减少开发周期和成本。
我们利用以前的工程模版,再新建2个文件夹,“BSP”(即板级支持包)和“SrcLibrary”,分别存放板子的驱动函数和工程服务函数(这个可以按自己习惯来,文件夹命名不同人有不同的风格),工程里也对应新建2个组。如图15.2-1。

图15.2-1 工程创建示意图
我们一个开发板可能有很多外设,一般每个外设我们都需要写驱动服务函数,即2个文件,.h和.C。.h一般是.C文件需要被外部调用的变量和函数的声明,以及软件和硬件配置相关内容;.C文件主要是一些和外设相关的过程实现函数。如上图,我们本次需要用到LED和按键Key两个外设,在BSP中我们对应建立了2个外设对应的.c和.h文件。工程文件的建立过程前面多次讲过,这里就略过。
“SrcLibrary”文件夹里我们放了“Delay”函数,因为本次编程中用到延时相关的内容,这里我们直接拿过来用即可。后面我们还会介绍。这里也提一下,我们开发时要善于用别人已经开发好的函数,这样可以大大提高开发速度,有些函数我们知道怎么去构建,但有时候确实非常耗费时间。也有些函数我们也没必要去深究,我一直秉承一个思想,当今世界知识爆炸,需要你去学的东西太多了,每一项你都要去深究学习,是不对的,要有的放矢,该放下的就放下,“学海无涯,人生苦短,点到即止”。当然对于你从事的专业工作,那肯定还是要深入研究,这个不要太死板。
15.2.2 LED相关程序设计
为方便以后移植,我们建立LED.h文件,对LED使用的端口,是高电平点亮还是低电平点亮等方式进行配置。这样即便后续硬件有更改,那么我们只用修改.h文件里的配置信息即可。当项目非常大时,这些差异化的配置,我们也可以统一放到一个.h文件中,如建立一个user_config.h,把所有需要特殊配置的内容都放在这里面。现在开发,这些配置都是可以通过工具自动生成的,都无需人工代码,现在项目开发有完备的工具链,你只需要在开发界面里选择好你的设置内容,代码自动生成。
LED.h的代码如下:
#ifndef __LED_H
#define __LED_H
#include "stm32f10x.h"
/* LED连接的GPIO端口配置, 用户只需要修改下面的代码即可改变控制的LED引脚 */
#define LED_GPIO_PORT GPIOB /* GPIO端口 */
#define LED_GPIO_CLK RCC_APB2Periph_GPIOB /* GPIO端口时钟 */
#define LED_GPIO_PIN GPIO_Pin_1 /* GPIO -pin*/
/** 定义LED亮灭对应的高低电平,根据硬件设计可修改
* 1 - off
* 0 - on
*/
#define LED_ON 0
#define LED_OFF 1
void LED_Init(void);//LED端口初始化
void LED_Toggle(void);//LED灯反转
#endif
代码中对LED的亮灭也进行了定义,这样做有两个好处:一是更加形象,编程的时候一看便知是什么意思;二是方便程序移植,如果其他硬件配置的高低电平点亮方式和软件设计的不同,那么我们只需要修改一下这个配置即可,无需再修改主代码。这段代码除了LED相关的硬件配置,还声明了2个函数,分别是LED端口的初始化函数和LED灯反转的函数,这2个函数需要在LED.c文件中实现。LED.c文件代码如下:
#include "stm32f10x.h" // Device header
#include "LED.h"
//LED端口初始化函数
void LED_Init(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*开启LED相关的GPIO外设时钟*/
RCC_APB2PeriphClockCmd(LED_GPIO_CLK, ENABLE);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED_GPIO_PIN;
/*设置引脚模式为通用推挽输出*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽输出
/*设置引脚速率为50MHz */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
/*调用库函数,初始化GPIO*/
GPIO_Init(LED_GPIO_PORT, &GPIO_InitStructure);
}
//LED端口反转函数
void LED_Toggle(void)
{
if (GPIO_ReadOutputDataBit(LED_GPIO_PORT, LED_GPIO_PIN) == LED_ON)
{
GPIO_SetBits(LED_GPIO_PORT, LED_GPIO_PIN);
}
else
{
GPIO_ResetBits(LED_GPIO_PORT, LED_GPIO_PIN);
}
}
/*注:LED的端口反转函数,还可以这样写,就是靠操作端口输出寄存器ODR的值,异或位运算^=可以反转IO口
void LED_Toggle(void)
{
LED_GPIO_PORT->ODR ^=LED_GPIO_PIN;//输出反转状态
}
*/
初始化函数我们就不讲了,步骤都是固定的,开启时钟,配置模式和速率,这里模式我们选择推挽输出 。
LED的反转函数LED_Toggle,我们用到了标准库函数GPIO_ReadOutputDataBit,这个函数是读取端口指定pin的输出状态。不清楚的可以再翻看前面《第14章GPIO简介》中库函数的介绍。我们采用的实现方式是最直观的好理解的一种方式,同时我们也提供了另外一个方式,就是通过对GPIO数据输出寄存器ODR的指定位进行异或操作,将对应PIn反转:
LED_GPIO_PORT->ODR ^=LED_GPIO_PIN
这个在《第2章.STM32开发C语言常用知识点》中有介绍,有需要的可以再翻看一下。
15.2.3 按键检测程序设计
和前面LED类似,在.h文件中进行硬件相关配置和实现函数的声明。
#ifndef __KEY_H
#define __KEY_H
#include "stm32f10x.h"
// 引脚定义
#define KEY_GPIO_CLK RCC_APB2Periph_GPIOA
#define KEY_GPIO_PORT GPIOA
#define KEY_GPIO_PIN GPIO_Pin_1
/** 按键按下标置宏
* 按键按下为高电平,设置 KEY_ON=1, KEY_OFF=0
* 若按键按下为低电平,把宏设置成KEY_ON=0 ,KEY_OFF=1
*/
#define KEY_ON 0
#define KEY_OFF 1
void Key_Init(void);
uint8_t Key_State(void);
#endif Key.c需要中需要设计2个函数,分别是初始化函数和按键是否按下的检测函数,代码如下:
#include "stm32f10x.h" // Device header
#include "Key.h"
#include "Delay.h"
//按键端口初始化
void Key_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(KEY_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入
GPIO_InitStructure.GPIO_Pin = KEY_GPIO_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(KEY_GPIO_PORT, &GPIO_InitStructure);
}
//获取按键的状态,是否被按下
uint8_t Key_State(void)
{
/*检测是否有按键按下 */
if(GPIO_ReadInputDataBit(KEY_GPIO_PORT,KEY_GPIO_PIN) == KEY_ON )
{
Delay_ms(20);//消抖
/*等待按键释放 */
while(GPIO_ReadInputDataBit(KEY_GPIO_PORT,KEY_GPIO_PIN) == KEY_ON);
Delay_ms(20);//消抖
return KEY_ON;
}
else
{
return KEY_OFF;
}
}
初始化函数我们这里设置为上拉输入模式。按键检测函数Key_State函数中用到了对GPIO数据输入寄存器IDR指定pin口的数据读取函数GPIO_ReadInputDataBit,用法和前面得GPIO_ReadOutputDataBit一样,有2个参数,分别是端口GPIOX和对应pin口。按键检测中需要Delay函数延时20ms进行消抖处理,两处消抖对应我们上节画的那个示意图。
15.2.4 主函数设计
主函数main.c的设计就非常简单了,首先是对硬件LED和KEY对应GPIO口初始化,然后就是检测按键是否按下,如果按下就反转LED灯的状态,代码如下:
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Key.h"
int main(void)
{
/* LED端口初始化 */
LED_Init();
/* 按键端口初始化 */
Key_Init();
/* 轮询按键状态,若按键按下则反转LED */
while(1)
{
if( Key_State()== KEY_ON)
{
/*LED反转*/
LED_Toggle();
}
}
}资源已经上传:
15.3 触类旁通
前面是最简单的一个输入检测和输出控制的实例,掌握了这个实例,我们用STM32可做的事就非常多了,无非是输入的硬件和输出控制的硬件的变化,但操作方式是一模一样的。比如输入硬件可以换成光敏元器件,根据亮度的不同会反馈高低电平,我们可以根据这个高低电平控制灯的亮灭,例如我们常见的日控灯。也可以将输入器件换成烟雾检测器件,输出变成蜂鸣器,检测到烟雾检测器件输入的信号,就给蜂鸣器高低电平实现鸣叫。在后面时钟章节,我们可以做一个类似的实验。
第16章.GPIO位带操作
16.1 位带基本概念
在STM32中,位带(Bit-Banding)是一种特殊的内存映射技术,它允许将特定的位(Bit)与特定的内存地址绑定,从而实现对单个位的原子级操作。这种技术主要用于对GPIO端口、寄存器以及其他外设的单个位进行高效的读写操作,极大地提高了代码的可读性和执行效率。
位带操作的基本概念
- 位带区(Bit-Band Region):
- 位带区是指内存中的一块区域,用于存储位带操作的目标数据。在STM32中,支持位带操作的区域主要包括SRAM区的最低1MB范围和片内外设区的最低1MB范围。
- 位带区的一个位在位带别名区会被“膨胀”成四个字节(即32位),这意味着每个位都被映射到了一个32位的地址空间上。
- 位带别名区(Bit-Band Alias Region):
- 位带别名区是与位带区相对应的另一块内存区域,用于通过别名方式访问位带区的数据。在STM32中,SRAM区里的0x22000000-0x23FFFFFF地址段和外设区里0x42000000-0x43FFFFFF地址段都是位带别名区。
- 通过操作位带别名区的地址,可以间接实现对位带区中单个位的读写操作。
位操作就是可以单独的对一个比特位读和写,这个在51单片机中非常常见。51单片机中通过关键字sbit来实现位定义,STM32没有这样的关键字,而是通过访问位带别名区来实现。在STM32中,有两个地方实现了位带,一个是SRAM区的最低1MB空间,另一个是外设区最低1MB空间。这两个1MB的空间除了可以像正常的RAM一样操作外,他们还有自己的位带别名区,位带别名区把这1MB的空间的每一个位膨胀成一个32位的字,当访问位带别名区的这些字时,就可以达到访问位带区某个比特位的目的。如图16.1-1所示。

图16.1-1 STM32位带示意图
位带操作的优势
- 原子性:位带操作可以确保对单个位的读写是原子性的,即在任何时候只有一个CPU周期可以访问这个位,从而避免了多线程并发访问时可能出现的竞态条件和数据不一致性问题。
- 高效性:通过位带操作,可以直接对单个位进行读写,而不需要对整个字节或更大的数据单元进行操作,这大大提高了操作的效率。
- 可读性:使用位带操作可以使得代码更加简洁明了,提高了代码的可读性和可维护性。
16.2 STM32位带区
16.2.1 外设位带区
外设外带区的地址为:0X40000000~0X40100000,大小为1MB,这1MB的大小在F103系列大/中/小容量型号的单片机中包含了片上外设的全部寄存器,这些寄存器的地址为:0X40000000~0X400233FF。外设位带区经过膨胀后的位带别名区地址为:0X42000000~0X43FFFFFF,这个地址仍然在Cortex-M3片上外设的地址空间中。在F103系列大/中小容量型号的单片机里面,0X40030000~0X4FFFFFFF属于保留地址,膨胀后的32MB位带别名区刚好就落到这个地址范围内,不会跟片上外设的其他寄存器地址重合。
STM32的全部寄存器都可以通过访问位带别名区的方式来达到访问原始寄存器比特位的效果,这比51单片机强大很多。因为51单片机里面并不是所有的寄存器都是可以比特位操作,有些寄存器还是得字节操作,比如SBUF。虽然说全部寄存器都可以实现比特操作,但我们在实际项目中并不会这么做,甚至不会这么做。有时候为了特定的项目需要,比如需要频繁的操作很多IO口,这个时候我们可以考虑把IO相关的寄存器实现比特操作。
16.2.2 SRAM 位带区
SRAM 的位带区的地址为:0x2000 0000~0x2000 FFFF,经过膨胀后的位带别名区地址为:0X2200 0000~0X23FF FFFF,大小为32MB。操作SRAM 的比特位这个用得很少。
16.2.3 位带区和位带别名区地址转换
位带区的一个比特位经过膨胀之后,虽然变大到4个字节,但是还是LSB才有效。有人会问这不是浪费空间吗,要知道STM32的系统总线是32位的,按照4个字节访问的时候是最快的,所以膨胀成4个字节来访问是最高效的。
我们可以通过指针的形式访问位带别名区地址从而达到操作位带区比特位的效果。下面我们简单介绍一下这两个地址如何转换。
16.2.3.1 外设位带别名区地址
这个要结合前面图16.1-1来看更容易理解。对于片上外设位带区的某个比特,记它所在字节的地址为A,位序号为n(0<=n<=31)(n的范围根据具体寄存器能控制的位决定),则该比特在别名区的地址为:
AliasAddr=0x42000000+(A-0x40000000)*8*4+n*4
0X42000000是外设位带别名区的起始地址,0x40000000是外设位带区的起始地址,(A-0x40000000)表示该比特前面有多少个字节,一个字节有8位,所以*8,一个位膨胀后是4个字节,所以*4,n表示该比特在A地址的序号,因为一个位经过膨胀后是四个字节,所以也*4。
16.2.3.2 SRAM 位带别名区地址:
对于SRAM位带区的某个比特,记它所在字节的地址为A,位序号为n(0<=n<=31)(n的范围根据具体寄存器能控制的位决定),则该比特在别名区的地址为:
AliasAddr=0x22000000+(A-0x20000000)*8*4+n*4
这个计算思路和外设位带别名区一样,区别只是基地址的不同。
16.2.3.3 位带区计算宏定义
在STM32中使用位带操作通常需要通过宏定义来实现。这些宏定义会将位带别名区的地址与位带区中的位进行映射,并提供方便的读写接口。代码及解释如下:
// 把“位带地址+位序号”转换成别名地址的宏
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x02000000+((addr & 0x000FFFFF)<<5)+(bitnum<<2)) 代码解释:
前面2个公式可能还比较好理解,换成位操作宏定义后,可能很多人就看的很蒙圈。解释如下,可以结合下面的图16.2-1,可能就比较好理解了。单片机更擅长做位移操作。


图16.2-1 位带计算示意图
我们以SRAM为例addr&0xF0000000,取地址的高4位,看看是2还是4,用于区分SRAM和外设地址,如果是2,+0x02000000则=0X22000000,即是SRAM,如果是4,+0x02000000则=0x42000000,即是外设;
addr&0x000FFFFF,屏蔽掉高三位,相当于减去0X20000000 或者0X40000000,为什么是屏蔽高三位?因为外设的最高地址是:0X20100000,跟起始地址0X20000000 ,真正有用的地址就是后五位,相减的时候,总是低5 位才有效,所以就把高三位屏蔽掉来达到减去起始地址的效果,具体屏蔽掉多少位跟最高地址有关。<<5 相当于*8*4,<<2 相当于*4,虽然没有直接*32或者*4形象,但单片机更擅长做位移操作。
最后我们就可以通过指针的形式操作这些位带别名区地址,最终实现位带区的比特位操作。
// 把一个地址转换成一个指针
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
// 把位带别名区地址转换成指针
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum)) addr是位带区的一个寄存器地址,bitnum是这个寄存器里的某一个bit位。BITBAND(addr, bitnum)这个宏定义计算得到了这个位在位带别名区的地址,MEM_ADDR(BITBAND(addr, bitnum))宏定义就是取位带别名区对应地址里映射的值。
16.3 位带操作示例
外设的位带区,覆盖了全部的片上外设的寄存器,我们可以通过宏为每个寄存器的位
都定义一个位带别名地址,实现位操作。 我们就以最简单的一个案例看一下,LED接在PB1上,每隔1秒亮灭一次。我们只是为了将下用法,所以就全部写在main函数中了。我们从前面讲解知识知道,我们直接操作ODR寄存器即可。从《参考手册》中我们可以知道 ODR 寄存器对应 GPIO 基址的偏移是12。delay函数直接用上一章示例中的即可。main函数如下:
#include "stm32f10x.h" // Device header
#include "Delay.h"
// 把“位带地址+位序号”转换成别名地址的宏
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x02000000+((addr & 0x000FFFFF)<<5)+(bitnum<<2))
// 把一个地址转换成一个指针
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
// 把位带别名区地址转换成指针
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
// GPIO ODR 寄存器地址映射
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
// 单独操作 GPIO 的某一个 IO 口,n(0,1,2...16),n 表示具体是哪一个 IO 口
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n)
//LED 初始化函数
void LED_Init(void);
int main(void)
{
/* LED端口初始化 */
LED_Init();
/* LED每隔一秒亮灭 */
while(1)
{
//点亮
PBout(1)=0;
Delay_ms(1000);
//熄灭
PBout(1)=1;
Delay_ms(1000);
}
}
//LED端口初始化函数
void LED_Init(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*开启LED相关的GPIO外设时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
/*设置引脚模式为通用推挽输出*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
/*设置引脚速率为50MHz */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
/*调用库函数,初始化GPIO*/
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
资源已经上传:
https://download.csdn.net/download/weixin_42109443/89623715?spm=1001.2014.3001.5503
第17章.RCC-STM32时钟配置
RCC(Reset Clock Control) 复位和时钟控制,包括复位和时钟控制两部分内容,本章我们主要讲解时钟部分. 大家可以参考《STM32F10X-中文参考手册》中的RCC 章节,里面有更详细的解释。本章我们首先学习一下STM32的时钟树,然后通过学习系统时钟函数SetSysClockTo72()加深对系统时钟配置的理解,最后通过一个简单的实例来实践时钟配置的方法。
17.1 STM32时钟树
MCU都是基于时序控制的,时序系统对MCU非常重要,因此在MCU设计时就设计了专门用于控制时序的电路,在芯片设计中称为时钟树设计。由此设计出来的时钟,可以精确控制我们的单片机系统。一个MCU越复杂,时钟系统也会相应地变得复杂,如STM32F1的时钟系统比较复杂,不像简单的51单片机一个系统时钟就可以解决一切。对于STM32F1系列的芯片,正常工作的主频可以达到72Mhz,但并不是所有外设都需要系统时钟这么高的频率,比如看门狗以及RTC只需要几十kHZ的时钟即可。同一个电路,时钟越快功耗越大,同时抗电磁干扰能力也会越弱,所以对于较为复杂的MCU一般都是采取多时钟源的方法来解决这些问题。所以我们称为时钟树而不是时钟。
STM32非常复杂,外设多,为了实现低功耗的要求,STM32的主控默认不开启这些外设功能。用户可以根据需要决定STM32要开启的功能,这个功能开关在STM32主控中也就是各个外设的时钟。

图17.1-1 STM32时钟树
在上图中把主要常关注几处标注出来了。A部分表示其他电路需要的输入时钟信号源;B为一个特殊的振荡电路“PLL”;C-K为各类时钟;L是STM32的时钟输出功能。其他部分后续如有用到我们再详细探讨。接下来我们对各部分进行讲解:
17.1.1 时钟源
如图17.1-1中标识A的部分。对于STM32F1系列单片机,输入时钟源(InputClock)主要包括四种,即HSI,HSE,LSI,LSE。其中,从时钟频率来分可以分为高速时钟源和低速时钟源,其中HIS和HSE为高速时钟,LSI和LSE是低速时钟。从来源可分为外部时钟源和内部时钟源,外部时钟源就是从外部通过接晶振的方式获取时钟源,其中HSE和LSE是外部时钟源;其他是内部时钟源,芯片上电即可产生,不需要借助外部电路。
①高速外部振荡器 HSE (High Speed External Clock signal)
HSE是高速的外部时钟信号,可以由有源晶振或者无源晶振提供,频率从4-16MHZ不等。当使用有源晶振时,时钟从OSC_IN引脚进入,OSC_OUT引脚悬空,当选用无源晶振时,时钟从OSC_IN和OSC_OUT进入,并且要配谐振电容。HSE 最常使用的就是8M 的无源晶振。
当确定PLL 时钟来源的时候,HSE 可以不分频或者2 分频,这个由时钟配置寄存器CFGR 的17位PLLXTPRE 设置,我们一般设置为HSE 不分频。
②低速外部振荡器 LSE (Low Speed External Clock signal)
外接 32.768kHz晶振,主要作用于 RTC 的时钟源。
③高速内部振荡器 HSI(High Speed Internal Clock signal)
HSI时钟信号由内部8MHz的RC振荡器产生,可直接作为系统时钟或在2分频后作为PLL输入。HSI的RC振荡器能够在不需要任何外部器件的条件下提供系统时钟。它的启动时间比HSE晶体振荡器短。但是由于即使在校准之后它的时钟频率精度仍较差。我们一般使用的HSE。
④低速内部振荡器 LSI(Low Speed Internal Clock signal)
LSI担当一个低功耗时钟源的角色,它可以在停机和待机模式下保持运行,为独立看门狗和自动唤醒单元提供时钟。LSI时钟频率大约40kHz(在30kHz和60kHz之间)。LSIRC可以通过控制/状态寄存器(RCC_CSR)里的LSION位来启动或关闭。
17.1.2 锁相环PLL
锁相环是自动控制系统中常用的一个反馈电路,在STM32主控中,锁相环的作用主要有是输入时钟净化和倍频。前者是利用锁相环电路的反馈机制实现,后者我们用于使芯片在更高且频率稳定的时钟下工作。在STM32中,锁相环的输出也可以作为芯片系统的时钟源。根据图17.1-1的时钟结构(图中标识为B的部分),使用锁相环时需要进行三个部分的配置。为了方便查看,截取了使用PLL作为系统时钟源的配置部分,如图17.1-2所示。

图17.1-2 PLL配置示意图
①PLLXTPRE:HSE 分频器作为 PLL 输入 (HSE divider for PLL entry)
即上图在标注为①的地方,它专门用于 HSE,ST 设计它有两种方式,并把它的控制功能放在 RCC_CFGR 寄存器中,说明如下图 17.1-3。我们由此得知,HSE输入PLL可以是 2 分频,或者是 1 分频(不分频)。经过 HSE 分频器处理后的输出振荡时钟信号比直接输入的时钟信号更稳定。

图17.1-3 PLLXTPRE 设置选项值
②PLLSRC:PLL 输入时钟源 (PLL entry clock source)
图中②表示的是 PLL 时钟源的选择器。参考 F103 参考手册,如下图17.1-4. 它有两种可选择的输入源:一个是HSI 的二分频时钟,另一个是 前面PLLXTPRE 处理后的 HSE 信号。

图17.1-4 PLLSRC 锁相环时钟源选择
③PLLMUL: PLL 倍频系数 (PLL multiplication factor)
图中③表示配置锁相环的倍频系数,倍频之后便是PLL 时钟PLLCLK。倍频因子可以是 2~16 倍。 如果我们要实现 72MHz 的主频率,我们通过选择 HSE 不分频作为 PLL 输入的时钟信号,即输入 8MHz,通过标号③选择倍频因子,可选择 2-16 倍频,我们选择 9 倍频,这样可以得到时钟信号为 8*9=72MHz。即PLL 时钟PLLCLK为72MHz,再下一步我们选为系统时钟后,系统时钟频率便为72MHz。
17.1.3 系统时钟
17.1.3.1 系统时钟SYSCLK
如图17.1-1中标识C的部分。STM32的系统时钟SYSCLK为整个芯片提供了时序信号。对单片机来说时钟频率越高,指令的执行速度越快,单位时间能处理的功能越多,但功耗也会越大。STM32的系统时钟是可配置的,在STM32F1系列中,系统时钟来源可以是:HSI、PLLCLK、HSE,通过CFGR的位SW[1:0]设置。
我们一般设置系统时钟:SYSCLK = PLLCLK = 72M。如果仍使用PLL作为系统时钟源,如果使用HSI/2,那么可以得到最高主频8MHz/2*16=64MHz。
17.1.3.2 AHB/APB总线时钟
从上面的图 17.1-1时钟树图可知,AHB、APB1、APB2、内核时钟等时钟通过系统时钟分频得到。
AHB 总线时钟HCLK
如图17.1-1中标识D的部分。系统时钟SYSCLK经过AHB预分频器分频之后得到时钟叫APB总线时钟,即HCLK,分频因子可以是[1,2,4,8,16,64,128,256,512],具体的由时钟配置寄存器CFGR的位7-4:HPRE[3:0]设置。片上大部分外设的时钟都是经过HCLK分频得到,至于AHB总线上的外设的时钟设置为多少,得等到我们使用该外设的时候才设置。AHB的时钟我们一般设置为1分频,即HCLK=SYSCLK=72M。
APB1 总线时钟PCLK1
如图17.1-1中标识E的部分。APB1总线时钟PCLK1由HCLK经过低速APB预分频器得到,分频因子可以是[1,2,4,8,16],具体的由时钟配置寄存器CFGR的位10-8:PRRE1[2:0]决定。PCLK1属于低速的总线时钟,最高为36M,片上低速的外设就挂载到这条总线上,比如USART2/3/4/5、SPI2/3,I2C1/2等。至于APB1总线上的外设的时钟设置为多少,得等到我们使用该外设的时候才设置。APB1这里我们设置为2分频,即PCLK1=HCLK/2=36M。
APB2 总线时钟PCLK2
如图17.1-1中标识F的部分。APB2总线时钟PCLK2由HCLK经过高速APB2预分频器得到,分频因子可以是[1,2,4,8,16],具体由时钟配置寄存器CFGR的位13-11:PPRE2[2:0]决定。PCLK2属于高速的总线时钟,片上高速的外设就挂载到这条总线上,比如全部的GPIO、US-ART1、SPI1等。至于APB2总线上的外设的时钟设置为多少,得等到我们使用该外设的时候才设置。对于APB2的时钟我们一般设置为1分频,即PCLK2=HCLK=72M。
17.1.3.3 其他时钟
除了上面的时钟,STM32还有很多时钟,剩下的时钟部分我们讲解几个重要的。原理都是一样的,大家会看手册配置即可,也没必要全部介绍。
USB时钟
如图17.1-1中标识H的部分。USB时钟是由PLLCLK经过USB预分频器得到,分频因子可以是[1,1.5],具体的由时钟配置寄存器CFGR的位22:USBPRE配置。USB的时钟最高是48M,根据分频因子反推过来算,PLLCLK只能是48M或者是72Mhz。
一般我们设置PLLCLK=72M,USBCLK=48Mhz。USB对时钟要求比较高,所以PLLCLK只能是由HSE倍频得到,不能使用HSI倍频。
Cortex 系统时钟
如图17.1-1中标识I的部分。Cortex 系统时钟由HCLK 8 分频得到,等于9MHZ,Cortex 系统时钟用来驱动内核的系统定时器SysTick。SysTick 一般用于操作系统的时钟节拍,也可以用做普通的定时。
ADC时钟
如图17.1-1中标识G的部分。ADC时钟由PCLK2经过ADC预分频器得到,分频因子可以是[2,4,6,8],具体的由时钟配置寄存器CFGR的位15-14:ADCPRE[1:0]决定。ADC时钟最高只能是14MHz,反推PCLK2的时钟只能是:28Mhz、56Mhz、84Mhz、112Mhz,鉴于PCLK2最高是72Mhz,所以只能取28M和56Mhz。
RTC 时钟
如图17.1-1中标识J的部分。RTC时钟可由HSE/128分频得到,也可由低速外部时钟信号LSE提供,频率为32.768KHZ,也可由低速内部时钟信号LSI提供,具体选用哪个时钟由备份域控制寄存器BDCR的位9-8:RTCSEL[1:0]配置。
独立看门狗时钟
如图17.1-1中标识K的部分。独立看门狗的时钟只能由LSI提供.LSI是低速的内部时钟信号,频率为40KHZ。
17.1.3.4 MCO 时钟输出
MCO是Microcontroller Clock Output的缩写,是微控制器时钟输出引脚,在STM32F1系列中由PA8复用所得,主要作用是可以对外提供时钟,相当于一个有源晶振。MCO的时钟来源可以是:PLLCLK/2、HSI、HSE、SYSCLK,具体选哪个由时钟配置寄存器CFGR的位26-24:MCO[2:0]决定。除了对外提供时钟这个作用之外,我们还可以通过示波器监控MCO引脚的时钟输出来验证我们的系统时钟配置是否正确。
17.2 系统时钟库函数
在固件库文件system_stm32f10x.c 的最后便是设置系统时钟的库函数SetSysClockTo72,如下代码:
static void SetSysClockTo72(void)
{
__IO uint32_t StartUpCounter = 0, HSEStatus = 0;
/* SYSCLK, HCLK, PCLK2 and PCLK1 configuration ---------------------------*/
RCC->CR |= ((uint32_t)RCC_CR_HSEON);
/* Wait till HSE is ready and if Time out is reached exit */
do
{
HSEStatus = RCC->CR & RCC_CR_HSERDY;
StartUpCounter++;
} while((HSEStatus == 0) && (StartUpCounter != HSE_STARTUP_TIMEOUT));
if ((RCC->CR & RCC_CR_HSERDY) != RESET)
{
HSEStatus = (uint32_t)0x01;
}
else
{
HSEStatus = (uint32_t)0x00;
}
if (HSEStatus == (uint32_t)0x01)
{
/* Enable Prefetch Buffer */
FLASH->ACR |= FLASH_ACR_PRFTBE;
/* Flash 2 wait state */
FLASH->ACR &= (uint32_t)((uint32_t)~FLASH_ACR_LATENCY);
FLASH->ACR |= (uint32_t)FLASH_ACR_LATENCY_2;
/* HCLK = SYSCLK */
RCC->CFGR |= (uint32_t)RCC_CFGR_HPRE_DIV1;
/* PCLK2 = HCLK */
RCC->CFGR |= (uint32_t)RCC_CFGR_PPRE2_DIV1;
/* PCLK1 = HCLK/2 */
RCC->CFGR |= (uint32_t)RCC_CFGR_PPRE1_DIV2;
/* PLL configuration: PLLCLK = HSE * 9 = 72 MHz */
RCC->CFGR &= (uint32_t)((uint32_t)~(RCC_CFGR_PLLSRC | RCC_CFGR_PLLXTPRE |
RCC_CFGR_PLLMULL));
RCC->CFGR |= (uint32_t)(RCC_CFGR_PLLSRC_HSE | RCC_CFGR_PLLMULL9);
/* Enable PLL */
RCC->CR |= RCC_CR_PLLON;
/* Wait till PLL is ready */
while((RCC->CR & RCC_CR_PLLRDY) == 0)
{
}
/* Select PLL as system clock source */
RCC->CFGR &= (uint32_t)((uint32_t)~(RCC_CFGR_SW));
RCC->CFGR |= (uint32_t)RCC_CFGR_SW_PLL;
/* Wait till PLL is used as system clock source */
while ((RCC->CFGR & (uint32_t)RCC_CFGR_SWS) != (uint32_t)0x08)
{
}
}
else
{ /* If HSE fails to start-up, the application will have wrong clock
configuration. User can add here some code to deal with this error */
}
}上述代码把把互联型相关的代码删掉了(STM32F10X_CL部分),该函数是直接操作寄存器的,有关寄存器部分请参考数据手册的RCC的寄存器描述部分。从上面代码可以大致总结配置步骤如下:
1.使能 HSE,并等待 HSE稳定
2.设置 AHB、APB2、APB1预分频因子
3.设置 PLL时钟来源,设置PLL倍频因子
4.使能PLL
5.等待PLL稳定
6.选择 PLL作为系统时钟来源
7.读取时钟切换状态位,确保 PLLCLK 被选为系统时钟
如果我们要配置某个外设的时候,假如配置APB1,我们也可以根据时钟树结构,根据时钟来源选择,设置分频因子这个步骤去配置,如下图17.2-1.

图17.2-1 时钟设置流程示意
17.3 系统时钟配置练习
STM32F103 默认的情况下使用的是内部8M的HSI作为时钟源,初始化后使用HSE,然后HSE经过PLL倍频之后作为系统时钟。通常的配置是:HSE=8Mhz,PLL的倍频因子为9,系统时钟就设置成:SYSCLK=8Mhz*9=72Mhz。使用HSE,系统时钟SYSCLK最高是128M。我们的库函数,当程序来到main函数之前,启动文件statup_stm32f10x_hd.s已经调用SystemInit()函数把系统时钟初始化成72MHZ,SystemInit()在库文件system_stm32f10x.c中定义。如果我们想把系统时钟设置低一点或者超频的话,可以修改底层的库文件,但为了维持库的完整性,我们可以根据时钟树的流程自行写一个。
当HSE故障的时候,如果PLL的时钟来源是HSE,那么当HSE故障的时候,这个时候CSS系统会自动切换HSI作为系统时钟,此时SYSCLK=HSI=8M。STM32时钟树的CSS(Clock Security System,时钟安全系统)是一个重要的安全机制,旨在提高系统的稳定性和可靠性,如图17.2-1中红色虚线框中位置。
因为调用库函数都是使用HSE,如果用户对精度要求不高,不想用HSE(因为要配置外部电路),而是想用稳定性和精度都差的HSI,这样可以省去外围电路的配置。下面我们给出个使用HSI配置系统时钟例子供参考,方法和系统时钟配置类似。代码如下(摘自野火):
void HSI_SetSysClock(uint32_t pllmul)
{
__IO uint32_t HSIStartUpStatus = 0;
// 把RCC外设初始化成复位状态,这句是必须的
RCC_DeInit();
//使能HSI
RCC_HSICmd(ENABLE);
// 等待 HSI稳定
while (RCC_GetFlagStatus(RCC_FLAG_HSIRDY) == RESET)
{
}
// 读取 HSI 就绪状态
HSIStartUpStatus = RCC->CR & RCC_CR_HSIRDY;
// 只有 HSI就绪之后则继续往下执行
if (HSIStartUpStatus == RCC_CR_HSIRDY)
{
//----------------------------------------------------------------------//
// 使能FLASH 预存取缓冲区
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);
// SYSCLK周期与闪存访问时间的比例设置,这里统一设置成2
// 设置成2的时候,SYSCLK低于48M也可以工作,如果设置成0或者1的时候,
// 如果配置的SYSCLK超出了范围的话,则会进入硬件错误,程序就死了
// 0:0 < SYSCLK <= 24M
// 1:24< SYSCLK <= 48M
// 2:48< SYSCLK <= 72M
FLASH_SetLatency(FLASH_Latency_2);
//----------------------------------------------------------------------//
// AHB预分频因子设置为1分频,HCLK = SYSCLK
RCC_HCLKConfig(RCC_SYSCLK_Div1);
// APB2预分频因子设置为1分频,PCLK2 = HCLK
RCC_PCLK2Config(RCC_HCLK_Div1);
// APB1预分频因子设置为1分频,PCLK1 = HCLK/2
RCC_PCLK1Config(RCC_HCLK_Div2);
//-----------------设置各种频率主要就是在这里设置-------------------//
// 设置PLL时钟来源为HSI,设置PLL倍频因子
// PLLCLK = 4MHz * pllmul
RCC_PLLConfig(RCC_PLLSource_HSI_Div2, pllmul);
//------------------------------------------------------------------//
// 开启PLL
RCC_PLLCmd(ENABLE);
// 等待 PLL稳定
while (RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET)
{
}
// 当PLL稳定之后,把PLL时钟切换为系统时钟SYSCLK
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
// 读取时钟切换状态位,确保PLLCLK被选为系统时钟
while (RCC_GetSYSCLKSource() != 0x08)
{
}
}
else
{ // 如果HSI开启失败,那么程序就会来到这里,用户可在这里添加出错的代码处理
// 当HSE开启失败或者故障的时候,单片机会自动把HSI设置为系统时钟,
// HSI是内部的高速时钟,8MHZ
while (1)
{
}
}
}
第18章.STM32中断系统概述
18.1 中断基本概念
中断:中断系统是微控制器中用于实时响应和处理突发事件的重要机制。 中断是一个信号,表示一个事件需要立即被处理。这个信号可以由硬件(外部中断)或软件(内部中断)生成。在STM32微控制器中,中断可以有多种触发源,包括外部引脚(如用户按下按钮)、内部源(如定时器溢出或数据接收完成)等。
当中断发生时,如果它被使能(即允许中断),外部设备或内部模块(如计时器)会打断CPU的当前执行任务,然后强制CPU转而处理一个特定的任务(即中断服务程序,ISR)。中断服务完成后,CPU会从中断返回,恢复之前的状态,并继续执行之前被打断的任务。
中断优先级:当有多个中断源同时申请中断时,微控制器会根据中断源的优先级进行裁决,优先响应更加紧急的中断源 。在STM32中,中断优先级管理由NVIC负责。每个中断源都可以配置一个优先级,数字越低,优先级越高。
中断嵌套:当一个中断程序正在运行时,又有新的更高优先级的中断源申请中断,CPU再次暂停当前中断程序,转而去处理新的中断程序,处理完成后依次返回上一级低优先级的中断服务程序。
中断服务程序(Interrupt Service Routine,ISR):中断服务程序是响应中断信号而执行的函数。这些函数是预先定义的,目的是对特定的中断事件做出快速反应。
上述几个概念示意图,如图18.1.

图18.1-1 中断概念示意图
18.2 中断系统基本结构

图18.2-1 STM32中断系统结构
STM32中断系统主要包括中断向量表、NVIC(嵌套向量中断控制器)和EXTI(外部中断/事件控制器)等组件。
- 中断向量表:
- 中断向量表是一个存储在固定内存位置的表,其中包含了所有中断和异常处理程序的入口地址。
- 当特定的中断被触发时,处理器使用这个表来确定应该跳转到哪个地址来执行相应的中断服务程序(ISR)。
- NVIC(Nested Vectored Interrupt Controller):
- NVIC是ARM Cortex-M内核的一部分,负责管理所有中断。
- 它允许每个中断源都有自己的优先级设置,以及嵌套中断,即一个高优先级的中断可以打断正在运行的低优先级中断服务程序。
- NVIC支持每个中断源的优先级分为16个或更多的优先级,这些优先级中数值较小的优先级更高。
- NVIC还包含中断使能寄存器、中断清除寄存器、状态和控制寄存器等,用于控制中断的使能、禁用和状态监测。
- EXTI(External Interrupt/Event Controller):
- EXTI是用于处理从GPIO引脚或其他一些内置外设(如PVD、RTC和USB唤醒事件)传入的外部信号的中断系统。
- 它可以被配置为响应特定的信号边沿(上升沿、下降沿或者两者)来触发中断。
- EXTI包含多个中断线路,每个线路对应于一个或多个GPIO引脚,这些线路可以单独配置来响应特定的事件。
18.3 NVIC 简介
18.3.1 功能介绍
NVIC(Nested Vectored Interrupt Controller,嵌套向量中断控制器)是STM32微控制器中负责中断和异常管理的重要组件。它实现了对中断请求的接收、排序、处理和响应,是STM32实现多任务处理和实时响应能力的关键。以下是NVIC的基本功能介绍:
-
中断管理:NVIC能够接收来自外设、软件或异常产生的中断请求,并根据配置的优先级对这些请求进行排序和处理。
-
嵌套中断:支持中断嵌套,即高优先级的中断可以打断正在执行的低优先级中断,实现中断的抢占式处理。
-
向量中断:中断服务程序的入口地址存储在中断向量表中,NVIC通过中断向量表快速定位并跳转到相应的中断服务程序。
-
优先级配置:允许为每个中断源配置不同的优先级,包括抢占优先级和子优先级(也称为响应优先级),以决定中断的响应顺序和嵌套关系。
NVIC是内核的器件,内核有关的资料《Cortex-M3权威指南》中有更为详细的描述。Cortex-M3内核都支持256个中断,其中包含了16个系统中断和240个外部中断,并且具有256级的可编程中断设置。芯片厂商一般不会把内核的这些资源全部用完,如STM32F103C8T6的系统中断有10个,外部中断有60个。STM32F103C8T6的中断向量表如下图所示,其实灰色部分为系统中断,其余为外部中断。




图18.3-1 STM32F10xxx产品(小容量、中容量和大容量)的向量表
在标准库文件stm32f10x.h 这个头文件中,IRQn_Type 这个结构体包含了F103 系列全部的中断声明。 在这个结构体中,根据不同的产品类型,有不同的声明,我们以我们使用的F103C8T6系列(MD)为例,摘取如下:
typedef enum IRQn
{
/****** Cortex-M3 Processor Exceptions Numbers ***************************************************/
NonMaskableInt_IRQn = -14, /*!< 2 Non Maskable Interrupt */
MemoryManagement_IRQn = -12, /*!< 4 Cortex-M3 Memory Management Interrupt */
BusFault_IRQn = -11, /*!< 5 Cortex-M3 Bus Fault Interrupt */
UsageFault_IRQn = -10, /*!< 6 Cortex-M3 Usage Fault Interrupt */
SVCall_IRQn = -5, /*!< 11 Cortex-M3 SV Call Interrupt */
DebugMonitor_IRQn = -4, /*!< 12 Cortex-M3 Debug Monitor Interrupt */
PendSV_IRQn = -2, /*!< 14 Cortex-M3 Pend SV Interrupt */
SysTick_IRQn = -1, /*!< 15 Cortex-M3 System Tick Interrupt */
/****** STM32 specific Interrupt Numbers *********************************************************/
WWDG_IRQn = 0, /*!< Window WatchDog Interrupt */
PVD_IRQn = 1, /*!< PVD through EXTI Line detection Interrupt */
TAMPER_IRQn = 2, /*!< Tamper Interrupt */
RTC_IRQn = 3, /*!< RTC global Interrupt */
FLASH_IRQn = 4, /*!< FLASH global Interrupt */
RCC_IRQn = 5, /*!< RCC global Interrupt */
EXTI0_IRQn = 6, /*!< EXTI Line0 Interrupt */
EXTI1_IRQn = 7, /*!< EXTI Line1 Interrupt */
EXTI2_IRQn = 8, /*!< EXTI Line2 Interrupt */
EXTI3_IRQn = 9, /*!< EXTI Line3 Interrupt */
EXTI4_IRQn = 10, /*!< EXTI Line4 Interrupt */
DMA1_Channel1_IRQn = 11, /*!< DMA1 Channel 1 global Interrupt */
DMA1_Channel2_IRQn = 12, /*!< DMA1 Channel 2 global Interrupt */
DMA1_Channel3_IRQn = 13, /*!< DMA1 Channel 3 global Interrupt */
DMA1_Channel4_IRQn = 14, /*!< DMA1 Channel 4 global Interrupt */
DMA1_Channel5_IRQn = 15, /*!< DMA1 Channel 5 global Interrupt */
DMA1_Channel6_IRQn = 16, /*!< DMA1 Channel 6 global Interrupt */
DMA1_Channel7_IRQn = 17, /*!< DMA1 Channel 7 global Interrupt */
#ifdef STM32F10X_MD
ADC1_2_IRQn = 18, /*!< ADC1 and ADC2 global Interrupt */
USB_HP_CAN1_TX_IRQn = 19, /*!< USB Device High Priority or CAN1 TX Interrupts */
USB_LP_CAN1_RX0_IRQn = 20, /*!< USB Device Low Priority or CAN1 RX0 Interrupts */
CAN1_RX1_IRQn = 21, /*!< CAN1 RX1 Interrupt */
CAN1_SCE_IRQn = 22, /*!< CAN1 SCE Interrupt */
EXTI9_5_IRQn = 23, /*!< External Line[9:5] Interrupts */
TIM1_BRK_IRQn = 24, /*!< TIM1 Break Interrupt */
TIM1_UP_IRQn = 25, /*!< TIM1 Update Interrupt */
TIM1_TRG_COM_IRQn = 26, /*!< TIM1 Trigger and Commutation Interrupt */
TIM1_CC_IRQn = 27, /*!< TIM1 Capture Compare Interrupt */
TIM2_IRQn = 28, /*!< TIM2 global Interrupt */
TIM3_IRQn = 29, /*!< TIM3 global Interrupt */
TIM4_IRQn = 30, /*!< TIM4 global Interrupt */
I2C1_EV_IRQn = 31, /*!< I2C1 Event Interrupt */
I2C1_ER_IRQn = 32, /*!< I2C1 Error Interrupt */
I2C2_EV_IRQn = 33, /*!< I2C2 Event Interrupt */
I2C2_ER_IRQn = 34, /*!< I2C2 Error Interrupt */
SPI1_IRQn = 35, /*!< SPI1 global Interrupt */
SPI2_IRQn = 36, /*!< SPI2 global Interrupt */
USART1_IRQn = 37, /*!< USART1 global Interrupt */
USART2_IRQn = 38, /*!< USART2 global Interrupt */
USART3_IRQn = 39, /*!< USART3 global Interrupt */
EXTI15_10_IRQn = 40, /*!< External Line[15:10] Interrupts */
RTCAlarm_IRQn = 41, /*!< RTC Alarm through EXTI Line Interrupt */
USBWakeUp_IRQn = 42 /*!< USB Device WakeUp from suspend through EXTI Line Interrupt */
#endif /* STM32F10X_MD */
} IRQn_Type;18.3.2 NVIC 寄存器
NVIC相关的寄存器定义了可以在core_cm3.h 文件中找到。代码如下:
typedef struct {
__IO uint32_t ISER[8]; // 中断使能寄存器
uint32_t RESERVED0[24];// 预留位
__IO uint32_t ICER[8]; // 中断清除寄存器
uint32_t RSERVED1[24];// 预留位
__IO uint32_t ISPR[8]; // 中断使能悬起寄存器
uint32_t RESERVED2[24];// 预留位
__IO uint32_t ICPR[8]; // 中断清除悬起寄存器
uint32_t RESERVED3[24];// 预留位
__IO uint32_t IABR[8]; // 中断有效位寄存器
uint32_t RESERVED4[56];// 预留位
__IO uint8_t IP[240]; // 中断优先级寄存器 (8Bit wide)
uint32_t RESERVED5[644];// 预留位
__O uint32_t STIR; // 软件触发中断寄存器
} NVIC_Type;上序代码可以看出,NVIC 的结构体定义给每个寄存器都预留了很多位,也许是为了日后扩展功能。具体芯片用了多少,还是要参考对应参考《Cortex-M3 内核编程手册》。STM32F103的中断在这些寄存器的控制下有序的执行。下面介绍这几个寄存器:
ISER[8]:全称Interrupt Set-Enable Registers,中断使能寄存器,用于使能中断。向该寄存器的某位写“1”可以使能对应的中断。CM3内核支持256个中断,这里用8个32位寄存器来控制,每个位控制一个中断。但是STM32F103的可屏蔽中断最多只有60个,所以对我们来说,有用的就是两个(ISER[0]和ISER[1]),总共可以表示64个中断。而STM32F103只用了其中的60个。ISER[0]的bit0~31分别对应中断0~31;ISER[1]的bit0~27对应中断32~59,这样总共60个中断就可以分别对应上了。要使能某个中断,必须设置相应的ISER位为1,使该中断被使能(这里仅仅是使能,还要配合中断分组、屏蔽、IO口映射等设置才算是一个完整的中断设置)。
ICER[8]:全称Interrupt Clear Enable Registers,是一个中断除能寄存器组。中断失能寄存器,用于禁止中断。向该寄存器的某位写“1”可以禁止对应的中断。该寄存器组与ISER的作用恰好相反,是用来清除某个中断的使能的。其对应位的功能,也和ICER一样。这里要专门设置一个ICER来清除中断位,而不是向ISER写0来清除,是因为NVIC的这些寄存器都是写1有效的,写0是无效的。
ISPR[8]:全称Interrupt Set Pending Registers,是一个中断使能挂起控制寄存器组。每个位对应的中断和ISER是一样的。通过置1,可以将正在进行的中断挂起,而执行同级或更高级别的中断。写0无效。
ICPR[8]:全称Interrupt Clear Pending Registers,是一个中断解挂控制寄存器组。中断解挂寄存器,用于解除中断的挂起状态。向该寄存器的某位写“1”可以解除对应中断的挂起状态。其作用与ISPR相反,对应位也和ISER是一样的。通过设置1,可以将挂起的中断解挂。写0无效。
IABR[8]:全称Interrupt Active Bit Registers,是一个中断激活标志位寄存器组。中断激活状态位寄存器,只读寄存器,用于指示中断是否正在被处理。对应位所代表的中断和ISER一样,如果为1,则表示该位所对应的中断正在被执行。这是一个只读寄存器,通过它可以知道当前在执行的中断是哪一个。在中断执行完了由硬件自动清零。
IP[240]:全称Interrupt Priority Registers,是一个中断优先级控制的寄存器组。中断优先级寄存器,用于设置中断的优先级。每个中断都有一个对应的优先级寄存器。STM32F103的中断分组与这个寄存器组密切相关。IP寄存器组由240个8bit寄存器组成,每个可屏蔽中断占用8bit,这样总共可以表示240个可屏蔽中断。而STM32F103只用到了60个。IP[59]~IP[0]分别对应中断59~0。而且每个可屏蔽中断占用的8bit也并没有全部使用,而是只用了高4位。这4位,又分为抢占优先级和子优先级。抢占优先级在前,子优先级在后。而这两个优先级各占几个位又要根据SCB->AIRCR中的中断分组设置来决定。关于中断优先级控制的寄存器组我们下面再讲。
在配置中断的时候我们一般只用ISER、ICER 和IP 这三个寄存器。
18.3.3 中断优先级
STM32中的中断优先级可以分为:抢占式优先级和响应优先级,响应优先级也称子优先级,每个中断源都需要被指定这两种优先级。如果有多个中断同时响应,抢占优先级高的就会抢占抢占优先级低的优先得到执行,如果抢占优先级相同,就比较子优先级。如果两个或者多个中断的抢占式优先级和响应优先级都相同时,那么就遵循自然优先级,看中断向量表的中断排序,数值越小,优先级越高。
如前面所述,在NVIC有专门的寄存器“中断优先级寄存器NVIC_IPRx”(数组为240个,实际只用了60个,即NVIC_IPR0-NVIC_IPR59共60个寄存器),用来配置外部中断的优先级,IPR宽度为8bit,原则上每个外部中断可配置的优先级为0~255,数值越小,优先级越高。但是绝大多数CM3 芯片都会精简设计,只使用了高四位[7:4],低四位取零,这样最多只有16级中断嵌套,即2^4=16。
NVIC的中断优先级由优先级寄存器的高4位决定,并对这4位可以进行了分组,分为高n位的抢占优先级和低4-n位的响应优先级。优先级的分组由内核外设SCB 的应用程序中断及复位控制寄存器AIRCR 的PRIGROUP[10:8] 位决定,F103 分为了5 组。如下图所示。通过该图我们可以清楚的看到组0~4对应的配置关系。例如优先级分组设置为3,那么STM32所有的60个中断,每个中断的中断优先寄存器的高四位中的最高3位是抢占优先级,低1位是响应优先级。每个中断,你可以设置抢占优先级为0~7,响应优先级为1或0。抢占优先级的级别高于响应优先级,数值越小所代表的优先级就越高。

图18.3-2 AIRCR 中断分组设置
18.3.4 NVIC编程步骤
NVIC中断编程的思路步骤大致如下:
Step1:选择优先级分组
设置优先级分组可调用库函数NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup)实现,有关NVIC中断相关的库函数都在库文件misc.c和misc.h中。 参数NVIC_PriorityGroup可以选择NVIC_PriorityGroup_0~NVIC_PriorityGroup_4,分别对应图18.3-2中的5个分组。
需要注意NVIC_PriorityGroupConfig是整个程序中只需要设置一次。当设置好了中断优先级分组后,其他各种外设对应的中断向量的中断优先级即基于目前设置分组进行设置。假设配置为NVIC_PriorityGroup_0或者NVIC_PriorityGroup_4,那么给多个外设分别设置NVIC_InitStructure的响应优先级或抢占优先级是无效的。所以如果工程里面有用到许多的外设中断,那么在确定了优先级分组后再给每个外设对应的中断向量配置优先级。如果例程中多个外设配置函数下重复使用NVIC_PriorityGroupConfig()进行配置,那么真正起作用的是最后一次赋值。所以建议可以对优先级分组函数NVIC_PriorityGroupConfig进行统一管理,比如可以放在主函数main中。
Step2:初始化NVIC_InitTypeDef结构体
这一步要实现3个动作,分别是选择中断源,配置抢占优先级和响应优先级,并使能中断。NVIC_InitTypeDef 结构体在固件库头文件misc.h中定义。如下代码所示:
typedef struct
{
uint8_t NVIC_IRQChannel; // 中断源
uint8_t NVIC_IRQChannelPreemptionPriority; // 抢占优先级
uint8_t NVIC_IRQChannelSubPriority; // 子优先级
FunctionalState NVIC_IRQChannelCmd; // 中断使能或者失能
} NVIC_InitTypeDef;结构体成员解释如下:
NVIC_IROChannel:用来设置中断源,不同的中断中断源不一样。注意这里不要写错,写错了程序也不会报错,只会导致不响应中断。具体的成员配置可参考IRQn_Type结构体定义,即前面《18.3.1 功能介绍》中的IRQn_Type代码。
NVIC_IRQChannelPreemptionPriority:抢占优先级,具体的值要根据优先级分组来确定,具体参考前面图18.3-2中提供的取值范围。
NVIC_IRQChannelSubPriority:响应(子)优先级,具体的值要根据优先级分组来确定,具体参考前面图18.3-2中提供的取值范围。
对抢占优先级和响应优先级的取值,库代码里也有明确的提示,和我们前面描述是一样,截图如下,供参考。

图18.3-3 优先级设置库文件提示
NVIC_IRQChannelCmd:中断使能(ENABLE)或者失能(DISABLE)。操作的是NVIC_ISER和NVIC_ICER 这两个寄存器。
Step3: 编写中断服务函数
在启动文件startup_stm32f10x_hd.s中已预先为每个中断都写了一个中断服务函数,只是这些中断函数都为空,目的只是为初始化中断向量表。实际的中断服务函数都要我们重新编写,为了方便管理我们一般把中断服务函数统一写在stm32f10x_it.c这个库文件中。且中断服务函数的函数名必须跟启动文件里面预先设置的一样,如果写错,系统就在中断向量表中找不到中断服务函数的入口,会直接跳转到启动文件里面预先执行写好的空函数,并且在里面无限循环,实现不了中断。
在讲完下节EXTI后,我们会编写一个简单的中断程序,结合这个程序,我们理解起来将会更加容易。
18.4 EXTI简介
EXTI(英文External interrupt/Event controller)—外部中断/事件控制器,管理了控制器的20个中断/事件线。每个中断/事件线都对应一个边沿检测器,可以实现输入信号的上升沿或下降沿的检测。检测到中断或事件之后,EXTI可以实现对每个中断/事件线的单独配置,可以单独配置为中断或者事件。
18.4.1 EXTI逻辑框图

图18.4-1 EXTI逻辑框图
如上图为EXTI的逻辑功能框图。在图中可以看到很多信号线上打一个斜杠并标注“20”字样,这表示在控制器内部类似的信号线路有20个,我们只要明白其中一个的原理即可,所有的线路原理都是一样的。
从EXTI功能框图可以看到有两条主线,一条是由输入线到NVIC中断控制器,一条是由输入线到脉冲发生器。这正好就是EXTI的两大功能,即产生中断与产生事件。下面根据标号顺序进行讲解,图示中也已经根据颜色进行了区分。
中断线路:我们首先看一下EXTI功能框图产生中断的线路,最终信号是流入NVIC控制器中。即上图中红色加蓝色组成的线路(①-②-③-④-⑤)。
编号①是输入线,是线路的信息输入端,它可以通过配置寄存器设置为任何一个GPIO口,或者是一些外设的事件。输入线一般都是存在电平变化的信号。
编号②是一个边沿检测电路,它会根据上升沿触发选择寄存器(EXTI_RTSR)和下降沿触发选择寄存器(EXTI_FTSR)对应位的设置来控制信号触发。边沿检测电路以输入线作为信号输入端,如果检测到有边沿跳变就输出有效信号1给编号③电路,否则输出无效信号0。而EXTI_RTSR和EXTI_FTSR两个寄存器可以控制需要检测哪些类型的电平跳变过程,可以是只有上升沿触发、只有下降沿触发或者上升沿和下降沿都触发。
编号③是一个或门电路,它的一个输入来自编号②电路,另一个输入来自软件中断事件寄存器(EXTI_SWIER),我们可以通过对EXTI_SWIER的读写操作就可以启动中断/事件线。或门是有1就输出为1,这两个输入随便一个是有效信号1就可以输出1给编号④和编号⑥电路。
编号④电路是一个与门电路,它的一个输入是编号③电路,另外一个输入来自中断屏蔽寄存器(EXTI_IMR)。与门电路要求输入都为1才输出1,所以如果EXTI_IMR设置为0,那么不管编号③电路的输出信号是1还是0,最终编号④电路输出的信号都为0;如果EXTI_IMR设置为1时,最终编号④电路输出的信号才则由编号③电路的输出信号决定,这样我们就可以通过控制EXTI_IMR来实现是否产生中断的目的。编号④电路输出的信号会被保存到挂起寄存器(EXTI_PR)内,如果编号④电路输出为1就会把EXTI_PR对应位置1。
编号⑤是将请求挂起寄存器(EXTI_PR)的内容输出到NVIC内,从而实现系统中断事件控制。
事件线路:下面我们看一下EXTI功能框图产生事件的线路最终输出一个脉冲信号。 即上图中红色加绿色组成的线路(①-②-③-⑥-⑦-⑧)。
编号⑥电路是一个与门电路,它的一个输入来自编号③电路,另外一个输入来自事件屏蔽寄存器(EXTI_EMR)。如果EXTI_EMR设置为0,那么不管编号③电路的输出信号是1还是0,最终编号⑥电路输出的信号都为0;如果EXTI_EMR设置为1,最终编号⑥电路输出的信号则由编号③电路的输出信号决定,这样我们可以通过控制EXTI_EMR来实现是否产生事件的目的。
编号⑦是一个脉冲发生器电路,当它的输入端(编号⑥电路的输出端)输入一个有效信号1时就会产生一个脉冲,如果输入端是无效信号就不产生输出脉冲。
编号⑧是一个脉冲信号,即产生事件的线路的最终产物,这个脉冲信号可以输出给其他外设电路使用,比如定时器TIM、模拟数字转换器ADC等等,这样的脉冲信号一般用来触发TIM或者ADC开始转换。
中断线路和事件线路的区别: 产生中断线路的目的是把输入信号输入到NVIC,然后运行中断服务函数,实现一个功能,属于软件级的。而产生事件线路的目的是传输一个脉冲信号给其他外设使用,是电路级别的信号传输,属于硬件级的功能。
18.4.2 中断/事件线
EXTI可配置20个中断/事件线,每个GPIO都可以被设置为输入线,占用EXTI0至EXTI15,还有4根用于特定的外设事件,详见下图。

图18.4-2 EXTI 中断/事件线
从上图可见,STM32F1供给IO口使用的中断线只有16个,但是STM32F1的IO口却远远不止16个,所以STM32把GPIO管脚GPIOx.0~GPIOx.15(x=A,B,C,D,E,F,G,H,I不同型号管脚数不一样,原理是一样的)分别对应中断线0~15。这样子每个中断线对应了多个IO口,以线0为例:它对应了GPIOA.0、GPIOB.0、GPIOC.0、GPIOD.0、GPIOE.0、GPIOF.0、GPIOG.0等。而中断线每次只能连接到1个IO口上,这样就需要通过配置决定对应的中断线配置到哪个GPIO上。
GPIO 和中断线映射关系是在寄存器 AFIO_EXTICR1 ~ AFIO_EXTICR4 中配置的。 如下图示意:

图18.4-3 外部中断通用I/O映像

图18.4-4 AFIO_EXTICR1 寄存器说明
AFIO_EXTICR1寄存器配置EXTI0到EXTI3线,包含的外部中断的引脚包括PAx到PGx,x=0到3。AFIO_EXTICR2寄存器配置EXTI4到EXTI7线,包含的外部中断的引脚包括PAx到PGx,x=4到7,AFIO_EXTICR2寄存器请打开参考手册查看,原理和AFIO_EXTICR1一样。AFIO_EX-TICR3和AFIO_EXTICR4以此类推。
同时需要注意,通过AFIO_EXTICRx配置GPIO线上的外部中断/事件,必须先使能AFIO时钟。
按教程中断/事件线与输入源的图18.4-2看,可以使用EXTI0至15线路对应到使用16个GPIO做外部中断,需要注意的是这16个线路并非都有单独的中断源,从stm32f10x.h查看对应芯片型号有EXTI0_IRQn、EXTI1_IRQn、EXTI2_IRQn、EXTI3_IRQn、EXTI4_IRQn、EXTI9_5_IRQn、EXTI15_10_IRQn,系统的中断函数同样也是EXTI0_IRQHandler、EXTI1_IRQHandler、EXTI2_IRQHandler、EXTI3_IRQHandler、EXTI4_IRQHandler、EXTI9_5_IRQHandler、EXTI15_10_IRQHandler。除了前面4个线路有单独的中断函数,后面5至9和10至15线路是复用的。那么如何区分到底是哪个线路的中断呢?可以结合后面的EXTI结构体内容来理解,EXTI_Lines在寄存器中都是一一对应状态标位,中断函数复用,因此在EXTI9_5_IRQHandler和EXTI15_10_IRQHandler的中断函数里面使用多次EXTI_GetITStatus函数可以判断出具体线路。
18.4.3 EXTI编程要点

18.4-5 EXTI配置示意图
我们进行EXTI编程的时候,可参考上图的示意图,编程流程也基本如此。即:
- 开启时钟:配置RCC(复位和时钟控制)以开启所涉及的外设时钟。
- 配置GPIO:选择GPIO端口为输入模式,并设置相应的引脚。
- 配置AFIO:选择中断引脚或进行引脚重映射。
- 配置EXTI:选择中断/事件线、触发方式等,并使能EXTI。
- 配置NVIC:设置中断优先级分组,并为EXTI中断分配优先级和使能中断。
- 编写中断服务函数:
通过以上配置,EXTI系统就可以根据外部信号的变化产生中断或事件,从而实现对外部事件的快速响应和处理。
18.4.4 EXTI 初始化结构体详解
标准库函数对每个外设都建立了一个初始化结构体,结构体成员用于设置外设工作参数,并由外设初始化配置函数调用,这些设定参数将会设置外设相应的寄存器,达到配置外设工作环境的目的。EXTI对应的初始化结构体是EXTI_InitTypeDef,对应的初始化函数为EXTI_Init()。初始化结构体和初始化库函数配合使用是标准库精髓所在,理解了初始化结构体每个成员的意义,可以帮助我们加深对该外设运用。初始化结构体定义在stm32f10x_exti.h文件中,初始化库函数定义在stm32f10x_exti.c文件中,编程时我们可以参考这两个文件内的注释使用。 初始化结构体的标准库函数代码如下:
typedef struct
{
uint32_t EXTI_Line; // 中断/事件线
EXTIMode_TypeDef EXTI_Mode; // EXTI 模式
EXTITrigger_TypeDef EXTI_Trigger; // 触发类型
FunctionalState EXTI_LineCmd; // EXTI 使能
} EXTI_InitTypeDef;①EXTI_Line:EXTI中断/事件线选择,可选EXTI0至EXTI19,可参考表EXTI中断_事件线选择。
②EXTI_Mode:EXTI模式选择,可选产生中断(EXTI_Mode_Interrupt)或产生事件(EXTI_Mode_Event)。
③EXTI_Trigger:EXTI边沿触发事件,可选上升沿触发(EXTI_Trigger_Rising)、下降沿触发(EXTI_Trigger_Falling)或者上升沿和下降沿都触发(EXTI_Trigger_Rising_Falling)。
④EXTI_LineCmd:控制是否使能EXTI线,可选使能EXTI线(ENABLE)或禁用(DISABLE)。
18.5 外部中断实验
现在我们综合前面所学,做一个综合实验。也没必要设计太复杂的实验,因为原理都是一样的。我们可直接使用前面《第15章.GPIO输入-按键检测》按键检测的那个例程即可,即按键作为外部输入,检测到按键后翻转LED灯。简单的连接示意图如下:

图18.5-1 EXTI按键中断接线图
18.5.1 LED相关程序设计
LED灯部分这里就不讲了,直接全部copy 《第15章.GPIO输入-按键检测》中的LED.c和LED.h.
18.5.2 按键相关程序设计
按键相关我们分别生成EXTI.h和EXTI.c两个文件,EXTI.h主要进行按键相关的硬件配置,EXTI.c进行按键相关的NVIC和EXTI配置,分别介绍如下:
18.5.2.1 按键硬件配置程序
#ifndef __EXTI_H
#define __EXTI_H
#include "stm32f10x.h"
//引脚定义
#define KEY_INT_GPIO_PORT GPIOA
#define KEY_INT_GPIO_CLK (RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO)
#define KEY_INT_GPIO_PIN GPIO_Pin_0
#define KEY_INT_EXTI_PORTSOURCE GPIO_PortSourceGPIOA
#define KEY_INT_EXTI_PINSOURCE GPIO_PinSource0
#define KEY_INT_EXTI_LINE EXTI_Line0
#define KEY_INT_EXTI_IRQ EXTI0_IRQn
#define KEY_IRQHandler EXTI0_IRQHandler
void EXTI_Key_Config(void);
#endif
前面已经多次提过,使用宏定义指定与硬件电路设计相关配置,对于程序移植或升级非常方便。在上面的宏定义中,我们指定了按键对应的硬件资源,我们除了开启GPIO的端口时钟外,还开启了AFIO的时钟,这是因为后面我们配置EXTI信号源的时候需要用到AFIO的外部中断控制寄存器AFIO_EXTICRx。
18.5.2.2 NVIC 配置
static void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 配置NVIC为优先级组1 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
/* 配置中断源:按键 */
NVIC_InitStructure.NVIC_IRQChannel = KEY_INT_EXTI_IRQ;
/* 配置抢占优先级 */
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
/* 配置子优先级 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
/* 使能中断通道 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}18.5.2.3 EXTI配置
void EXTI_Key_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
/*开启按键GPIO口的时钟*/
RCC_APB2PeriphClockCmd(KEY_INT_GPIO_CLK,ENABLE);
/* 配置 NVIC 中断*/
NVIC_Configuration();
/*----------KEY配置------------*/
/* 选择按键用到的GPIO */
GPIO_InitStructure.GPIO_Pin = KEY_INT_GPIO_PIN;
/* 配置为上拉输入 */
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(KEY_INT_GPIO_PORT, &GPIO_InitStructure);
/* 选择EXTI的信号源 */
GPIO_EXTILineConfig(KEY_INT_EXTI_PORTSOURCE, KEY_INT_EXTI_PINSOURCE);
EXTI_InitStructure.EXTI_Line = KEY_INT_EXTI_LINE;
/* EXTI为中断模式 */
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
/* 上升沿中断 */
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;
/* 使能中断 */
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
}首先,GPIO_InitTypeDef和EXTI_InitTypeDef结构体定义两个用于GPIO和EXTI初始化配置的变量,关于这两个结构体前面都已经讲解过,不再赘述。使用GPIO之前必须开启GPIO端口的时钟,由于用到了EXTI还要开启AFIO时钟。调用NVIC_Configuration函数完成对按键优先级配置并使能中断通道。
作为中断/事件输入线时需把GPIO配置为输入模式,我们这里方便起见就没有设计外部电路,直接设置为上拉输入。
GPIO_EXTILineConfig函数用来指定中断/事件线的输入源,实际上就是设定外部中断配置寄存器的AFIO_EXTICRx值,该函数有两个参数,第一个参数指定GPIO端口源(A,B,C,D,E….),第二个参数为选择对应GPIO引脚编号(0~15)。我们实验是为产生中断并执行中断服务函数,因此EXTI选择中断模式,按键选择上升沿触发,并使能EXTI线。
18.5.3 中断服务函数
void KEY_IRQHandler(void)
{
//确保是否产生了EXTI Line中断
if(EXTI_GetITStatus(KEY_INT_EXTI_LINE) != RESET)
{
LED_Toggle();//反转
//清除中断标志位
EXTI_ClearITPendingBit(KEY_INT_EXTI_LINE);
}
}
图18.5-2 中断服务函数
如上图18.5-2所示,我们中断服务函数写在了系统中断文件stm32f10x_it.c中。为确保中断确实发生,我们一般会在中断服务函数中调用中断标志位状态读取函数读取外设中断标志位来判断标志位状态。EXTI_GetITStatus函数用来获取EXTI的中断标志位状态,如果EXTI线有中断发生函数返回“SET”否则返回“RESET”。EXTI_GetITStatus函数是通过读取EXTI_PR寄存器值来判断EXTI线中断状态的。按键的中断服务函数就是让LED翻转状态。执行任务后需要调用EXTI_ClearITPendingBit函数清除EXTI的中断标志位。
18.5.4 主函数
int main(void)
{
/* LED端口初始化 */
LED_Init();
/* 初始化EXTI中断,按下按键会触发中断, 触发中断会进入stm32f10x_it.c文件中对应的的中断服务函数,反转LED灯*/
EXTI_Key_Config();
/* 等待中断,由于使用中断方式,CPU不用轮询按键 */
while(1)
{
}
}
主函数很简单,LED_Init()函数定义在led.c文件内,完成LED对应GPIO口的初始化配置。EXTI_Key_Config函数完成按键的GPIO和EXTI配置。
例程文件已上传:https://download.csdn.net/download/weixin_42109443/89932712
第19章.基本定时器
TIM(Timer)定时器是STM32系列微控制器中常用的外设之一,定时器可以对输入的时钟进行计数,并在计数值达到设定值时触发中断。本章开始介绍定时器的相关内容。
19.1 定时器简介
STM32定时器根据复杂度和应用场景分为了高级定时器、通用定时器、基本定时器三种类型。在前面《第17章.RCC-STM32时钟配置》的图17.1-1 STM32时钟树中,我们可以看到有8个定时器,其中定时器1和8挂载在APB2总线上,定时器2-7挂载在APB1总线上。 注意不同型号的STM单片机的资源是不一样的,我们教程用的STM32F103C8T6定时器资源有TIM1/TIM2/TIM3/TIM4,即一个高级定时器和3个通用定时器,没有基本定时器。
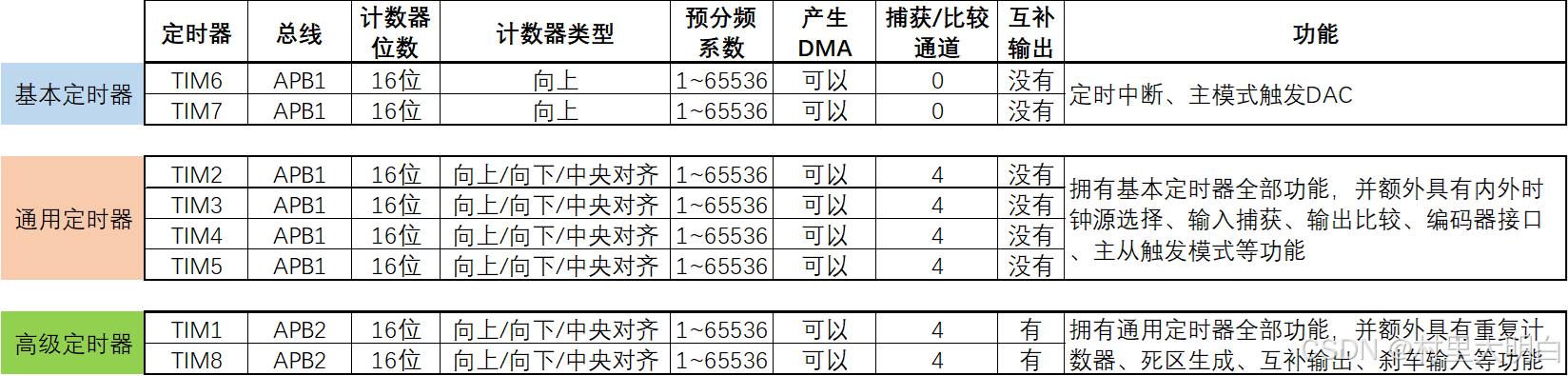
图19.1-1 定时器分类
19.1.1 基本定时器
概述:基本定时器TIM6和TIM7是一个16位的只能向上计数的定时器,只能定时,没有外部IO。
作用:基本定时器用于基本的定时功能。不支持输入捕获和输出比较功能,但可以用于驱动DAC(数模转换器)或产生基本的定时中断。
19.1.2 通用定时器
概述:通用定时器TIM2/3/4/5是一个16位的可以向上/下计数的定时器,可以定时,可以输出比较,可以输入捕捉,每个定时器有4个外部IO(可参考前面第三章中的《图3.3-2 STM32F103C8T6各引脚定义》)。
作用:除具备基本定时器所有功能外,还具有输入捕获、输出比较功能。输入捕获功能可用于测量输入信号的频率和脉宽,输出比较功能可产生PWM波形用于电机、舵机控制等场景。
19.1.3 高级定时器
概述:高级定时器TIM1/8是一个16位的可以向上/下计数的定时器,除了具有通用定时器的所有功能外,还支持互补输出、死区时间控制等高级功能,每个定时器有8个外部IO。
作用:主要用于三相电机控制。
19.2 基本定时器框图
学习基本定时器框图会对定时器有一个很好的整体了解,之后的编程也会有一个清晰的思路。

图19.2-1 基本定时器框图
19.2.1 时钟源
如图中标号①部分,定时器要实现计数功能,首先要给它一个时钟源:定时器时钟TIMxCLK,即内部时钟CK_INT。基本定时器时钟挂载在APB1总线,所以它的时钟来自于APB1总线,但是基本定时器时钟不是直接由APB1总线直接提供,而是先经过一个倍频器。当APB1的预分频器系数为1时,这个倍频器系数为1,即定时器的时钟频率等于APB1总线时钟频率;当APB1的预分频器系数≥2分频时,这个倍频器系数就为2,即定时器的时钟频率等于APB1总线时钟频率的两倍,库函数中APB1 预分频的系数是2,即PCLK1=36Mhz,所以定时器时钟TIMxCLK=36*2=72Mhz。
19.2.2 控制器
控制器除了控制定时器复位、使能、计数等功能之外,还可以用于触发DAC转换。
19.2.3 时基单元
时基单元包括:预分频器寄存器(TIMx_PSC)、计数器寄存器(TIMx_CNT)、自动重载寄存器(TIMx_ARR)。基本定时器的这三个寄存器都是16位有效数字,即可设置值范围是0~65535。
PSC 预分频器:时基单元中的预分频器PSC,输入CK_PSC来源于控制器部分,实际上就是来自于内部时钟(CK_INT),输出CK_CNT是分频后的时钟,它是计数器实际的计数时钟,通过设置预分频器寄存器(TIMx_PSC)的值可以得到不同频率的CK_CNT,计算公式如下,公式中PSC是写入预分频器寄存器(TIMx_PSC)的值。

预分频器寄存器(TIMx_PSC)可以在运行过程中修改它的数值,新的预分频数值将在下一个更新事件时起作用。更新事件发生时,会把TIMx_PSC寄存器值更新到其影子寄存器中,才会起作用。
影子寄存器:从上框图看,预分频器PSC后面有一个影子,自动重载寄存器也有个影子,这就表示这些寄存器有影子寄存器。影子寄存器是一个实际起作用的寄存器,不可直接访问。我们可以把预分频系数写入预分频器寄存器(TIMx_PSC),但是预分频器寄存器只是起到缓存数据的作用,只有等到更新事件发生时,预分频器寄存器的值才会被自动写入其影子寄存器中,这时才真正起作用。
自动重载寄存器:自动重装载寄存器ARR是一个16位的寄存器,这里面装着计数器能计数的最大值。当计数到这个值的时候,如果使能了中断的话,定时器就产生溢出中断。该寄存器及其影子寄存器和PSC预分频器有所不同,自动重载寄存器是否具有缓冲作用还受到ARPE位的控制。当该位置0时,ARR寄存器不进行缓冲,我们写入新的ARR值时,该值会马上被写入ARR影子寄存器中,从而直接生效;当该位置1时,ARR寄存器进行缓冲,我们写入新的ARR值时,该值不会马上被写入ARR影子寄存器中,而是要等到更新事件发生才会被写入ARR影子寄存器,这时才生效。预分频器寄存器则没有这样相关的控制位。
计数器:基本定时器的计数器(CNT)是一个16位递增的计数器,当寄存器(TIMx_CR1)的CEN位置1,即使能定时器,每来一个CK_CNT脉冲,TIMx_CNT的值就会递增加1。当TIMx_CNT值与TIMx_ARR的设定值相等时,TIMx_CNT的值就会被自动清零并且会生成更新事件(如果开启相应的功能,就会产生DMA请求、产生中断信号或者触发DAC同步),如此循环。TIMx_CNT等于TIMx_ARR时,称之为定时器溢出,定时器溢出就伴随着更新事件的发生。
19.3 定时时间的计算
计数器在CK_CNT的驱动下,计一个数的时间则是CK_CNK的倒数,而根据前面公式CK_CNT=TIMxCLK/(PSC+1),那么记一个数的时间为:(PSC+1)/TIMxCLK,产生一次中断的时间则等于:

其中ARR即为自动重载寄存器的值,因为是从0开始计数的,因此公式中需要+1.
下面我们举例说明。我们设置一个10ms周期的定时器更新中断,一般思路是先设置预分频寄存器,然后才是自动重载寄存器。我们内部时钟TIMxCLK为72MHz,我们把预分频系数设置为7200,即写入预分频寄存器的值PSC为7199,那么CK_CNT=72MHz/7200=10KHz。这样就得到计数器的计数频率为10KHz,计数器1秒钟可以计10000个数。所以我们让计数器计数100个数就能满足要求,即需要设置自动重载寄存器的值ARR为99。如果1秒中断的话,那ARR为10000-1=9999即可。
19.4 基本定时器控制寄存器
下面介绍基本定时器(TIM6/TIM7) 的几个重要的寄存器,完整的可以参考《STM32F10x-中文参考手册》。
19.4.1控制寄存器1(TIMx_CR1)

图19.4-1 TIMx_CR1 寄存器
位7(APRE)用于控制自动重载寄存器ARR是否具有缓冲作用,如果ARPE位置1,ARR起缓冲作用,即只有在更新事件发生时才会把ARR的值写入其影子寄存器里;如果ARPE位置0,那么修改自动重载寄存器的值时,该值会马上被写入其影子寄存器中立即生效。
位0(CEN)用于使能或者禁止计数器,该位置1计数器开始工作,置0停止工作。
19.4.2 DMA/中断使能寄存器(TIMx_DIER)

图19.4-2 TIMx_DIER 寄存器
位8(UDE)用于使能或者禁止更新DMA请求,DMA相关内容,我们后面会再单独介绍,这里我们暂且用不到,置0即可。
位0(UIE)用于使能或者禁止更新中断,我们用到中断时,该位需要置1。
19.4.3 状态寄存器(TIMx_SR)

图19.4-3 TIMx_SR 寄存器
位0(UIF)是中断更新的标志位,当发生中断时由硬件置1,然后就会执行中断服务函数,需要软件清零,所以我们必须在中断服务函数里把该位清零。如果中断后,不把该位清零,那么系统会一直进入中断服务函数。
19.4.4 计数器寄存器(TIMx_CNT)

图19.4-4 TIMx_CNT 寄存器
该寄存器就是计数器的实时计数值。
19.4.5 预分频寄存器(TIMx_PSC)

图19.4-5 TIMx_PSC 寄存器
该寄存器是基本寄存器TIM6/TIM7的16位预分频寄存器,写入数值范围0到65535,分频系数为1到65536。
19.5.6 自动重载寄存器(TIMx_ARR)

图19.4-6 TIMx_ARR寄存器
该寄存器可以由前面寄存器TIMx_CR1的APRE位设置是否进行缓冲。计数器的值会和ARR寄存器影子寄存器进行比较,当两者相等,定时器就会溢出,发生更新事件,如果打开更新中断,还会发生更新中断。
19.5 基本定时器相关库函数
基本定时器功能相对较少,后面通用定时器我们还会介绍相关库函数。这里我们先只介绍基本定时器定时中断的相关库函数,DMA等相关的,会在后续DMA等相关章节再介绍。
19.5.1 内部时钟选择函数:TIM_InternalClockConfig
函数名:TIM_InternalClockConfig
函数原形:TIM_InternalClockConfig(TIM_TypeDef*TIMx)
功能描述:设置 TIMx 内部时钟
输入参数:TIMx:x可以是2,3或者4(注:STM32F103C8T6只有4个定时器,没有基本定时器)
举例:
/* Selects the internal clock for TIM2 */
TIM_InternalClockConfig(TIM2);19.5.2 时基单元配置函数:TIM_TimeBaseInit
函数名:TIM_TimeBaseInit
函数原形:
void TIM_TimeBaseInit(TIM_TypeDef*TIMx,TIM_TimeBaseInitTypeDef*TIM_TimeBaseInitStruct);功能描述:根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时基单元,即时基单元初始化;
输入参数:
TIM_TypeDef* TIMx:指向定时器实例的指针。STM32系列微控制器包含多个定时器(如TIM1、TIM2等),每个定时器都有自己的一组寄存器。通过该指针,可以指定要初始化的定时器。TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct:指向TIM_TimeBaseInitTypeDef结构体的指针,该结构体包含了定时器时间基数单元的配置信息。
时基单元初始化结构体介绍如下:
typedef struct {
uint16_t TIM_Prescaler; // 预分频器
uint16_t TIM_CounterMode; // 计数模式
uint32_t TIM_Period; // 定时器周期
uint16_t TIM_ClockDivision; // 时钟分频
uint8_t TIM_RepetitionCounter; // 重复计算器
} TIM_TimeBaseInitTypeDef;(1)TIM_Prescaler:定时器预分频器设置,时钟源经预分频器PSC后才是定时器时钟,它设定TIMx_PSC寄存器的值。可设置范围为0至65535,实现1至65536分频。
(2)TIM_CounterMode:STM32定时器支持多种计数模式,如向上计数、向下计数、中央对齐计数(通用定时器章节会介绍)等。基本定时器只能是向上计数,即TIMx_CNT只能从0开始递增,并且无需初始化。
| TIM_CounterMode | 描述 |
| TIM_CounterMode_Up | 向上计数模式 |
| TIM_CounterMode_Down | 向下计数模式 |
| TIM_CounterMode_CenterAligned1 | 中央对齐模式 1 计数模式 |
| TIM_CounterMode_CenterAligned2 | 中央对齐模式 2 计数模式 |
| TIM_CounterMode_CenterAligned3 | 中央对齐模式 3 计数模式 |
(3)TIM_Period:定时器周期,即设定自动重载寄存器的值,在事件生成时更新到影子寄存器。可设置范围为0至65535。
(4)TIM_ClockDivision:时钟分频,设置定时器时钟CK_INT频率与数字滤波器采样时钟频率分频比,基本定时器没有此功能,不用设置。这个值主要有1,2,4分频,扥别对应TIM_CKD_DIV1 ,TIM_CKD_DIV2,TIM_CKD_DIV4.
(5)TIM_RepetitionCounter:重复计数器,属于高级控制寄存器专用寄存器位,利用它可以非常容易控制输出PWM的个数。基本定时器这里不用设置。
虽然基本初始化结构体有5个成员,但对于基本定时器只需设置预分频器TIM_Prescaler和自动重载寄存器TIM_Period两个就可以。
举例:
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 0xFFFF;
TIM_TimeBaseStructure.TIM_Prescaler = 0xF;
TIM_TimeBaseStructure.TIM_ClockDivision = 0x0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, & TIM_TimeBaseStructure); 19.5.3 定时器状态标志位清除函数TIM_ClearFlag
函数名: TIM_ClearFlag
函数原形:
void TIM_ClearFlag(TIM_TypeDef* TIMx, uint16_t TIM_FLAG); 功能描述:TIM_ClearFlag函数用于清除指定的定时器状态标志位。在STM32的定时器中,状态标志位用于指示定时器当前的状态或发生的事件。例如,当定时器计数到自动重装载寄存器(ARR)的值时,会触发更新事件,并设置相应的状态标志位。通过调用TIM_ClearFlag函数,可以清除这些状态标志位,以便进行后续的状态检测或事件处理。
在定时器的中断服务程序或轮询程序中,可以通过检查状态标志位来判断定时器是否发生了特定的事件。在事件处理完毕后,可以使用TIM_ClearFlag函数清除状态标志位,以避免重复处理同一事件。
参数说明:
TIM_TypeDef* TIMx:指向定时器实例的指针。STM32中有多个定时器(如TIM1、TIM2等),每个定时器都有自己的一组寄存器。通过该指针,可以指定要操作的定时器。uint16_t TIM_FLAG:要清除的状态标志位。不同的定时器有不同的状态标志位,用于指示定时器的不同状态(如更新事件、输入捕获事件等)。对于基本定时器主要是更新事件TIM_FLAG_Update,对于其他的状态在后续定时器章节再介绍。
举例:
TIM_TypeDef* TIMx = TIM3; // 假设使用TIM3定时器
uint16_t TIM_FLAG = TIM_FLAG_Update; // 假设要清除更新事件的状态标志位
// 清除TIM3的更新事件状态标志位
TIM_ClearFlag(TIMx, TIM_FLAG);19.5.4 中断功能配置TIM_ITConfig
函数名:TIM_ITConfig
函数原形:
void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState);参数说明:
- TIM_TypeDef* TIMx:指向要配置的定时器的指针。STM32系列微控制器包含多个定时器,如TIM1、TIM2等,此参数用于选择具体的定时器。
- uint16_t TIM_IT:指定要配置的中断源。STM32定时器的中断源包括更新中断(Update Interrupt)、捕获/比较中断(Capture Compare Interrupt)等。具体的中断源可以通过宏定义来选择,如TIM_IT_Update、TIM_IT_CCx(x=1,2,3,4)等。常见的如下,对于基本定时器来说,只有更新中断TIM_IT_Update。
①TIM_IT_Update:更新中断(或称溢出中断)。当定时器的计数器达到其预设的自动重装载值(ARR)并溢出时,将触发此中断。这是定时器中最基本且常用的中断类型,常用于实现周期性任务或时间测量。
②TIM_IT_CCx(x=1, 2, 3, 4):捕获/比较中断。STM32定时器具有多个捕获/比较通道(通常为4个),每个通道都可以配置为输入捕获或输出比较模式。当捕获/比较通道的输入信号达到预设的阈值或输出信号与预设值匹配时,将触发此中断。这种中断类型常用于信号测量、PWM输出控制等场景。
③TIM_IT_Trigger:触发中断。当定时器的外部触发输入(如ETR、TIx等)满足预设条件时,将触发此中断。这种中断类型通常用于外部信号的同步或触发其他外设的操作。
④TIM_IT_Break:刹车中断(高级定时器)。当定时器的刹车输入信号有效时,将触发此中断。刹车功能通常用于安全相关的应用,如电机控制中的紧急停车。
3.FunctionalState NewState:指定中断的新状态。这个参数是枚举类型FunctionalState,通常有两个取值:ENABLE(启用中断)和DISABLE(禁用中断)。
功能描述:TIM_ITConfig函数用于启用或禁用指定定时器的一个或多个中断源。通过配置这个函数,用户可以在定时器发生特定事件时产生中断,从而在中断服务程序中执行相应的操作。
举例:
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); 19.5.5 定时器中断状态获取函数TIM_GetITStatus
STM32定时器的TIM_GetITStatus函数是一个用于检查定时器中断标志位是否被置位的函数。
函数原型:
ITStatus TIM_GetITStatus(TIM_TypeDef* TIMx, uint16_t TIM_IT);参数说明:
- TIM_TypeDef* TIMx:指向要检查的定时器的指针。STM32系列微控制器包含多个定时器,如TIM1、TIM2等,此参数用于选择具体的定时器。
- uint16_t TIM_IT:指定要检查的中断标志位。STM32定时器的中断标志位包括更新中断标志(TIM_IT_Update)、捕获/比较中断标志(TIM_IT_CCx,x=1, 2, 3, 4)等。
返回值:函数返回ITStatus类型的值,表示中断标志位的状态。ITStatus通常是一个枚举类型,包含两个取值:SET(表示中断标志位被置位)和RESET(表示中断标志位未被置位)。
功能描述:TIM_GetITStatus函数用于检查指定定时器的指定中断标志位是否被置位。如果中断标志位被置位,则表示相应的中断事件已经发生,此时可以在中断服务程序中执行相应的中断处理代码。
举例:
void TIM2_IRQHandler(void) {
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) {
// 处理定时器更新中断
// ...
// 清除中断标志位
TIM_ClearFlag(TIM2, TIM_IT_Update);
}
}19.5.6 定时器使能函数TIM_Cmd
TIM_Cmd是用于控制定时器(TIM)外设的使能(ENABLE)或失能(DISABLE)状态的函数。
函数原型:
void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState);参数说明:
- TIM_TypeDef* TIMx:这是一个指向定时器结构体的指针,用于选择要操作的定时器。STM32微控制器通常有多个定时器(如TIM1、TIM2等),通过该参数可以选择具体的定时器。
- FunctionalState NewState:这是一个枚举类型的参数,用于指定定时器的状态。它通常有两个取值:
ENABLE:使能定时器,即启动定时器的工作。DISABLE:失能定时器,即停止定时器的工作。
功能描述:TIM_Cmd函数的主要功能是控制定时器的使能或失能状态。当NewState参数为ENABLE时,函数将启动指定的定时器,使其开始计数或执行其他配置的任务。当NewState参数为DISABLE时,函数将停止指定的定时器,使其停止计数或执行其他任务。
举例:
TIM_Cmd(TIM2, ENABLE); // 使能TIM2定时器19.5.7 清除中断待处理标志位函数TIM_ClearITPendingBit
函数原形:
void TIM_ClearITPendingBit(TIM_TypeDef* TIMx, uint16_t TIM_IT);参数说明:
TIM_TypeDef* TIMx:指向定时器实例的指针。STM32中有多个定时器实例,如TIM1、TIM2等,通过此参数可以指定要操作的定时器。uint16_t TIM_IT:指定要清除的中断标志位。这个参数通常是一个宏定义,代表特定的中断类型,如更新中断、捕获比较中断等。
功能描述:TIM_ClearITPendingBit函数的功能是清除指定定时器的指定中断待处理标志位。当定时器发生某个中断事件并启用了相应的中断时,中断待处理标志位会被置位。通过调用此函数,可以清除相应的中断待处理标志位,从而告知中断控制器该中断事件已经被处理。
TIM_ClearITPendingBit函数通常在定时器中断服务程序(ISR)中使用。当中断服务程序被调用时,表示定时器已经发生了某个中断事件。在中断服务程序中,除了处理中断事件外,还需要清除相应的中断待处理标志位,以确保中断控制器能够正常接收后续的中断请求。
举例:
/* Clear the TIM2 Capture Compare 1 interrupt pending bit */
TIM_ClearITPendingBit(TIM2, TIM_IT_CC1); 19.6 基本定时器应用案例
本章我们主要学习基本定时器的定时中断功能,基本定时器没有外部IO口,只能用内部时钟。我们练习的案例也很简单,就是通过基本定时器的定时中断,实现LED灯以1秒为周期进行亮灭。我们直接在前面章节EXTI的例程上修改即可,LED接在PB1口上。由于我这边用的开发板没有基本定时器TIM6-7,因此我们用基本定时器TIM2模拟该功能即可。
本例程大致思路如下,通过定时器10ms触发一次中断,并进行计次,主函数判断记次为100(1秒时间)时反转LED灯。
19.6.1 编程步骤
(1)开定时器时钟;
(2)初始化时基单元初始化结构体;
(3)使能定时器TIMx,的更新update中断;
(4)打开定时器;
(5)编写中断服务函数;
19.6.2 硬件相关宏定义配置
LED灯部分这里就不讲了,直接全部copy 《第15章.GPIO输入-按键检测》中的LED.c和LED.h.
我们硬件相关配置推荐使用宏,这样是方便后期更改的,只用改头文件,其他函数都不用修改。除了硬件相关的配置,参数配置也推荐用宏。同时我们前面知道这几个定时器,APB1和APB2上都有,这样一些配置函数也是可得通过宏来指定,如RCC_APB1PeriphClockCmd函数名可以指定给一个宏。这样不管硬件怎么变,都可以只修改宏定义即可,非常便于移植。我们建立BaseTIM.h头文件,代码如下:
#ifndef __BASETIM_H
#define __BASETIM_H
#include "stm32f10x.h"
/*定时器TIM参数定义*/
#define BASIC_TIM TIM2//定时器选择
#define BASIC_TIM_APBxClock_FUN RCC_APB1PeriphClockCmd//定时器对应总线
#define BASIC_TIM_CLK RCC_APB1Periph_TIM2//总线对应时钟
#define BASIC_TIM_Period 100-1//自动重载计数器
#define BASIC_TIM_Prescaler 7200-1//分频器
#define BASIC_TIM_IRQ TIM2_IRQn//中断号
#define BASIC_TIM_IRQHandler TIM2_IRQHandler//中断服务函数
/*
我们内部时钟TIMxCLK为72MHz,我们把预分频系数设置为7200,即写入预分频寄存器的值PSC为7199,
那么CK_CNT=72MHz/7200=10KHz。这样就得到计数器的计数频率为10KHz,计数器1秒钟可以计10000个数。
所以我们让计数器计数100个数就能10ms中断一次,即需要设置自动重载寄存器的值ARR为99。
*/
/*函数声明*/
void BASIC_TIM_Init(void);
#endif /* __BASETIM_H */19.6.3 定时器相关配置函数
在BaseTIM.c文件主要进行定时器初始化配置,NVIC配置。如下代码:BASIC_TIM_Init()函数包含了NVIC和定时器初始化配置函数,这样后续调用这一个函数就可以实现初始化;
#include "BaseTIM.h"
/* 中断优先级配置*/
static void BASIC_TIM_NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
// 设置中断组为0
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
// 设置中断来源
NVIC_InitStructure.NVIC_IRQChannel = BASIC_TIM_IRQ ;
// 设置主优先级为 0
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
// 设置抢占优先级为0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/*定时器配置*/
static void BASIC_TIM_Mode_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
BASIC_TIM_APBxClock_FUN(BASIC_TIM_CLK, ENABLE);// 开启定时器时钟,BASIC_TIM_APBxClock_FUN即为APB1的时钟
TIM_TimeBaseStructure.TIM_Period = BASIC_TIM_Period; // 自动重装载寄存器的值
TIM_TimeBaseStructure.TIM_Prescaler= BASIC_TIM_Prescaler;// 时钟预分频数
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;// 时钟分频因子 ,基本定时器没有,可不用管
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; // 计数器计数模式,基本定时器只能向上计数,没有计数模式的设置
//TIM_TimeBaseStructure.TIM_RepetitionCounter=0;// 重复计数器的值,只有高级定时器有,可不用管
/* 初始化定时器*/
TIM_TimeBaseInit(BASIC_TIM, &TIM_TimeBaseStructure);
/*清除计数器中断标志位*/
TIM_ClearFlag(BASIC_TIM, TIM_FLAG_Update);
/* 开启计数器中断*/
TIM_ITConfig(BASIC_TIM,TIM_IT_Update,ENABLE);
/* 使能计数器*/
TIM_Cmd(BASIC_TIM, ENABLE);
}
void BASIC_TIM_Init(void)
{
BASIC_TIM_NVIC_Config();
BASIC_TIM_Mode_Config();
}
19.6.4 定时器中断服务函数
在中断服务文件stm32f10x_it.c文件中加入如下中断服务函数:
void BASIC_TIM_IRQHandler (void)
{
if ( TIM_GetITStatus( BASIC_TIM, TIM_IT_Update) != RESET )
{
counter++;
TIM_ClearITPendingBit(BASIC_TIM , TIM_FLAG_Update);
}
}19.6.5 主函数
#include "stm32f10x.h"
#include "BaseTIM.h"
#include "LED.h"
volatile uint32_t counter = 0; // ms 计时变量
int main(void)
{
/* LED端口初始化 */
LED_Init();
/*定时器初始化*/
BASIC_TIM_Init();
while(1)
{
if(counter==100)
{
counter=0;
LED_Toggle();//反转
}
}
}
相关例程文件已经上传:https://download.csdn.net/download/weixin_42109443/89949241
未完待续
参考资料:
【1】哔站江协科技STM32入门教程
【2】《STM32单片机原理与项目实战》刘龙、高照玲、田华著
【3】《ARM Cortex-M3嵌入式原理及应用》黄可亚著
【4】《STM32嵌入式微控制器快速上手》陈志旺著
【5】《STM32单片机应用与全案例实践》沈红卫等著
【6】《野火STM32开发指南》
【7】《正点原子STM32开发指南》



















 2837
2837

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











