







前言
本篇文章主要来源于武汉大学多源导航实验室的文章,大家也可以去看原篇(http://www.i2nav.com/index/newListDetail_zw?newskind_id=13a8654e060c40c69e5f3d4c13069078&newsinfo_id=d4fc52fc6eff4be5859e18406b62d46d)。
本篇我们以一款典型MEMS IMU模块为例来带着大家过一遍MEMS的常见精度指标,希望能对大家正确理解和选用MEMS惯性器件有所帮助。
由于生产MEMS芯片和模块的厂家多数是做集成电路芯片出身的企业,因此很多惯性器件的精度指标都是沿用了集成电路领域的术语(尤其是模拟集成电路),而未采用惯导行业的专业术语。因此阅读起来有个“翻译”的过程,大家需要格外注意!
这里我们以美国模拟器件公司(Analog Devices Inc., ADI) 比较有代表性的MEMS IMU模块ADIS16465为例来进行参数解读,以致敬这家MEMS惯性器件产品的先驱。

陀螺仪参数
动态误差
先看陀螺的参数:

Dynamic Range
这个动态范围是指量程,这款IMU有三个子型号,对应不同的陀螺量程,适用于不同应用场景。选量程大的子型号其绝对误差也会跟着放大(因为一款传感器的相对精度一般是不变的),因此在传感器选型时,尽量根据实际需求选个刚好够用的。
下面为了描述方便,我们只对ADIS465-1这个小量程的子型号来讲解。
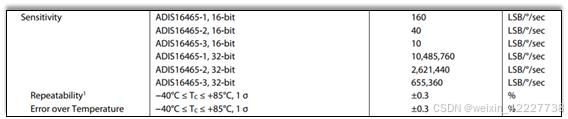
Sensitivity
这个所谓灵敏度是指惯性器件的比例因子(标度因子)的设计值(名义值、额定值),类似于传统光学陀螺里的脉冲当量的倒数。它告诉用户如何将器件输出的数字量转化成陀螺角速度,它的单位LSB/°/sec更严格的写法应该是LSB/(°/sec),其中的LSB是指传感器输出数字量的最低有效位(Least Significant Bit)。这里请注意,MEMS IMU的输出量一般是角速度和比力的形式,而不是像传统高精度IMU那样输出角增量和速度增量。不同量程的子型号当然对应不同的比例因子,从表中还能看出这个模块还有低分辨率(16-bit)和高分辨率(32-bit)两种模式,出于精度考虑我们当然应该选高分辨率模式。
Repeatability
是我们真正需要关心的精度指标,我本以为是陀螺比例因子的逐次上电重复性,但仔细看下表格底部的注释1,说是在500小时高温测试中观察到的长期变化。虽然我不太理解为什么要这么测Repeatability,不过这种测试够严格,应该能反映该参数的长期稳定性和重复性了。具体数值是0.3%(千分之三),而且还是1σ,这可不小,也就是说你实测过程中看到0.6%(2σ)甚至0.9%(3σ)的比例因子误差也是有可能的,也是不能退货的。
Error over Temperature
是比例因子的全温误差,是指比例因子在额定工作温度范围内相对于室温(25℃)比
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 172
172

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









