









目标
在本章中, - 我们将了解FAST算法的基础知识。 - 我们将使用OpenCV功能对FAST算法进行探索。
理论
我们看到了几个特征检测器,其中很多真的很棒。但是,从实时应用程序的角度来看,它们不够快。最好的例子是计算资源有限的SLAM(同时定位和制图)移动机器人
使用FAST进行特征检测
1.选择图像中是否要识别为兴趣点的像素p,使其强度为Ip
2.选择适当的阈值t
3.考虑被测像素周围有16个像素的圆圈。(见下图)
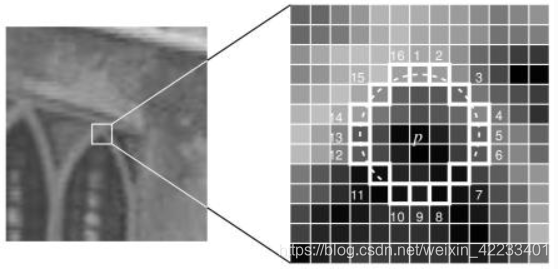 4.现在,如果圆中存在一组(共16个像素)n个连续的像素,它们均比Ip+t亮,或者比Ip−t都暗,则像素p
4.现在,如果圆中存在一组(共16个像素)n个连续的像素,它们均比Ip+t亮,或者比Ip−t都暗,则像素p
是一个角。(在上图中显示为白色虚线)。n被选为12。
5.建议使用高速测试以排除大量的非角区域。此测试仅检查1、9、5和13处的四个像素(如果第一个1和9太亮或太暗,则对其进行测试。如果是,则检查5和13)。如果p是一个角,则其中至少三个必须全部比Ip+t
亮或比Ip−t暗。如果以上两种情况都不是,则p
不能为角。然后,可以通过检查圆中的所有像素,将完整的分段测试标准应用于通过的候选项。该检测器本身具有很高的性能,但有几个缺点:
6.它不会拒绝n <12的候选对象。
像素的选择不是最佳的,因为其效率取决于问题的顺序和角落外观的分布。
7.高速测试的结果被丢弃了。
8.彼此相邻地检测到多个特征。
机器学习的方法解决了前三点。使用非最大抑制来解决最后一个问题。
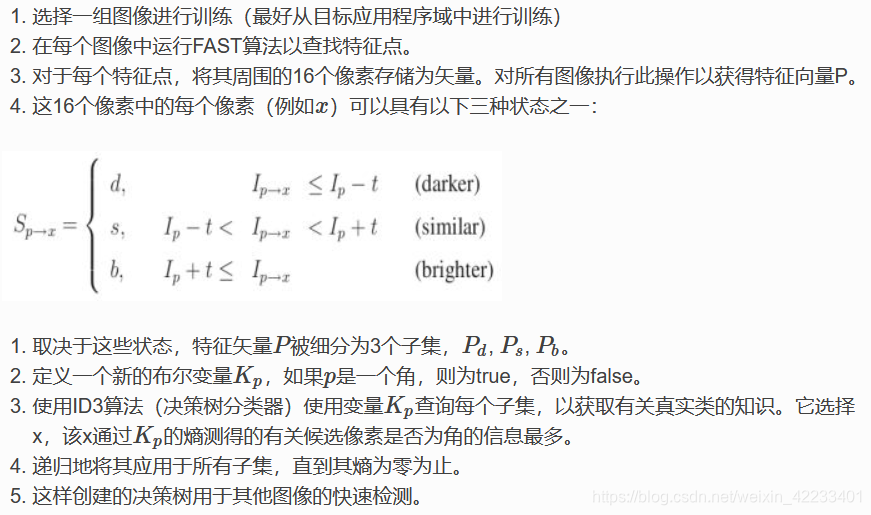
让机器学习一个角点检测器
非最大值抑制
在相邻位置检测多个兴趣点是另一个问题。通过使用非极大抑制来解决。

Opencv实现
它被称为OpenCV中的任何其他特征检测器。 如果需要,您可以指定阈值,是否要应用非极大抑制,要使用的邻域等。 对于邻域,定义了三个标志,分别为cv.FAST_FEATURE_DETECTOR_TYPE_5_8,cv.FAST_FEATURE_DETECTOR_TYPE_7_12和cv.FAST_FEATURE_DETECTOR_TYPE_9_16。 以下是有关如何检测和绘制FAST特征点的简单代码。
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
path = r'D:\Laboratory\Study\Computer Vision\opencv4-python\jingdu.png'
img = cv.imread(path,0)
# 用默认值初始化FAST对象
fast = cv.FastFeatureDetector_create()
# 寻找并绘制关键点
kp = fast.detect(img,None)
img2 = cv.drawKeypoints(img, kp, None, color=(255,0,0))
# 打印所有默认参数
print( "Threshold: {}".format(fast.getThreshold()) )
print( "nonmaxSuppression:{}".format(fast.getNonmaxSuppression()) )
print( "neighborhood: {}".format(fast.getType()) )
print( "Total Keypoints with nonmaxSuppression: {}".format(len(kp)) )
cv.imwrite('fast_true.png',img2)
# 关闭非极大抑制
fast.setNonmaxSuppression(0)
kp = fast.detect(img,None)
print( "Total Keypoints without nonmaxSuppression: {}".format(len(kp)) )
img3 = cv.drawKeypoints(img, kp, None, color=(255,0,0))
# cv.imwrite('D:/Laboratory/Study/Computer Vision/opencv4-python/jingdu1.png', img3)
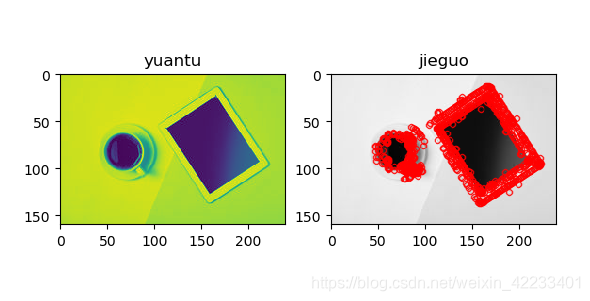
plt.subplot(121),plt.imshow(img),plt.title('yuantu')
plt.subplot(122),plt.imshow(img3),plt.title('jieguo')
结果














 3685
3685











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









