







 CCU6单元主要用于控制交流和直流驱动器,特别适合无刷直流电机的块换相控制,能降低CPU负载。其功能包括中心对齐/边缘对齐PWM,支持霍尔传感器或反电动势检测。通过快速紧急停止(/CTRAP)功能,可在没有CPU负载的情况下实现紧急停机。此外,CCU6还集成了电流测量、位置识别等功能,适用于永磁同步电动机和无刷直流电机应用。
CCU6单元主要用于控制交流和直流驱动器,特别适合无刷直流电机的块换相控制,能降低CPU负载。其功能包括中心对齐/边缘对齐PWM,支持霍尔传感器或反电动势检测。通过快速紧急停止(/CTRAP)功能,可在没有CPU负载的情况下实现紧急停机。此外,CCU6还集成了电流测量、位置识别等功能,适用于永磁同步电动机和无刷直流电机应用。
一、CCU6捕获比较单元6
CCU6单元用于控制交流和直流驱动器
特殊操作模式支持使用霍尔传感器或反电动势检测控制无刷直流电机
1.1主要功能
1.1.1中心对齐/边缘对齐PWM
非常适合大多数Emotor应用
1.1.2 无刷直流电动机的块换相
由于优化了模块实现,CPU负载降低
1.1.3 快速紧急停止(/CTRAP)
易于配置块交换
二、CCU6中心对齐/边缘对齐PWM
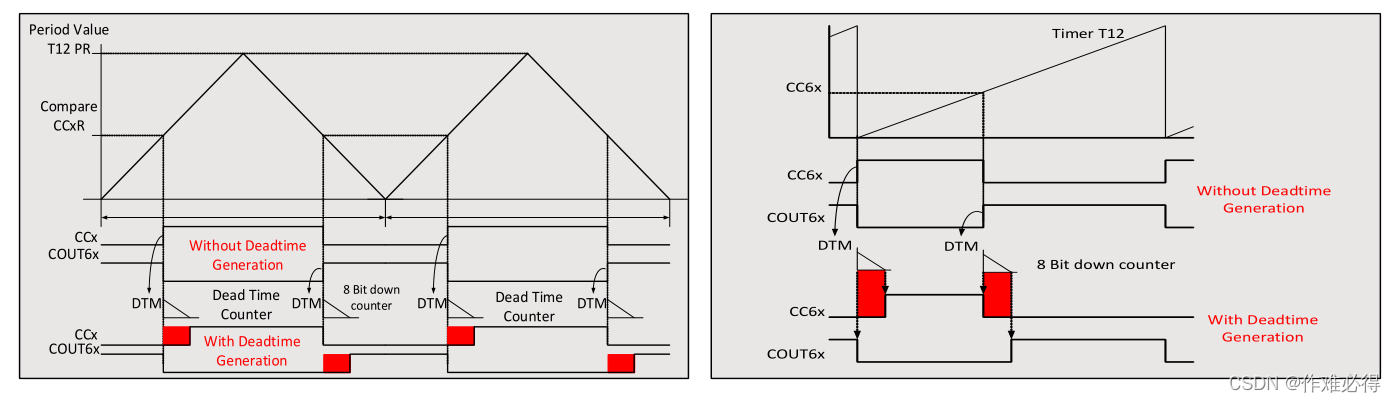
2.1 中心对准PWM
空间矢量调制非常适合永磁同步电动机的应用
特点:
1.通过中心对齐PWM降低EMC
2.周期匹配/零匹配时的阴影转移
3.死区时间的长度可以单独编程,以处理MOSFET的瞬态行为
2.2 边缘对齐PWM
无刷直流(块换向)
特点:
1.非常适合阻止换向
2.易于实现
三、 CCU6无刷直流电动机的块换相
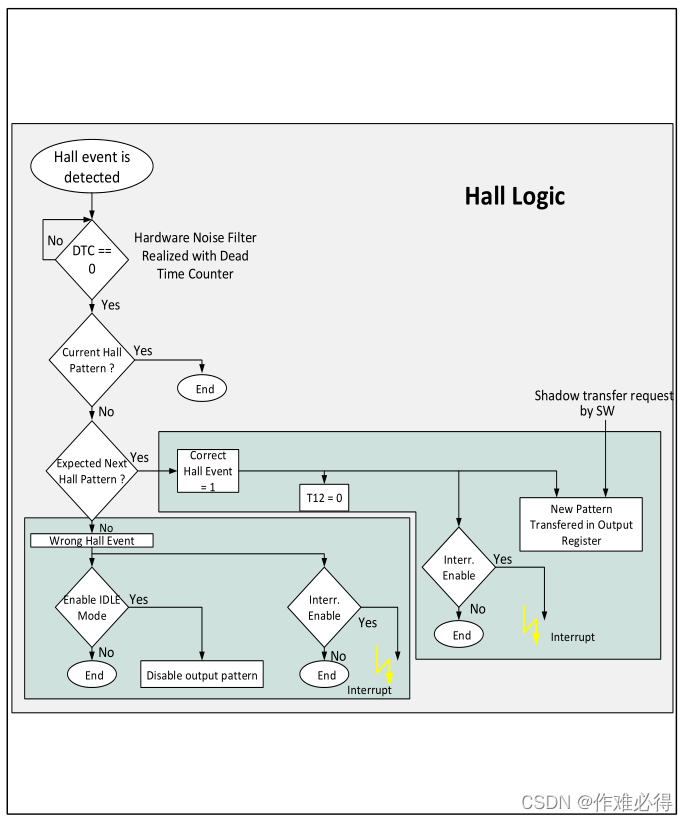
3.1 在每个正确的霍尔事件中,都可以加载一个新霍尔模式及其相应的输出模式
3.2 霍尔模式的采样采用T12输入时钟
3.3 噪声滤波器可通过使用死区时间计数器DTC0(6位宽)实现
3.4 对霍尔模式输入进行采样,并与当前霍尔模式和预期的下一个霍尔模式进行比较,以确定电机的移动方向。如果值匹配,则无需进一步操作
四、CCU6 快速紧急停止(/CTRAP)
4.1 通过外部信号(/CTRAP)在没有CPU负载的情况下快速紧急停止
将输出通道切换到定义的状态
4.2 TRAP 控制
每个通道的被动状态选择位
每个通道的初始化位
4.3 在TRAP状态下,所有输出都可以切换到选定的被动状态
4.4 TRAP状态可由SW或HW通过位字段触发
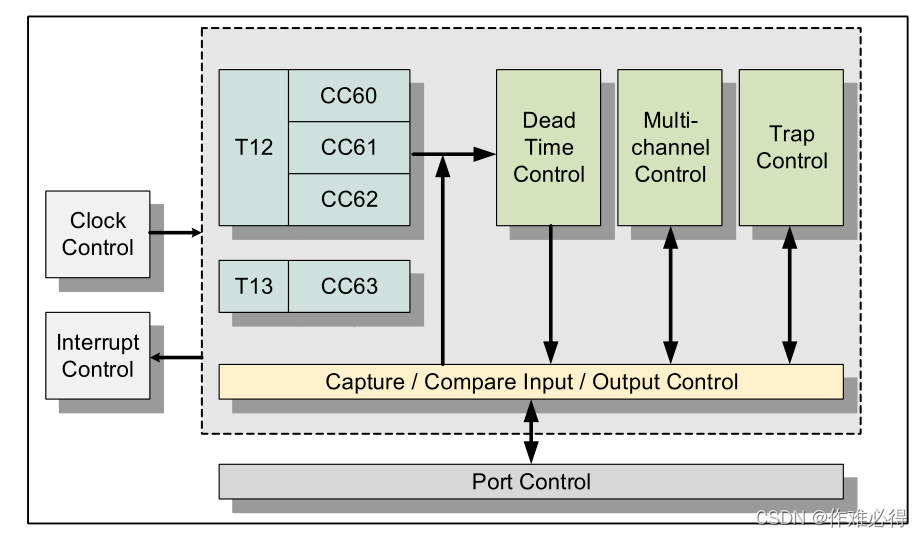
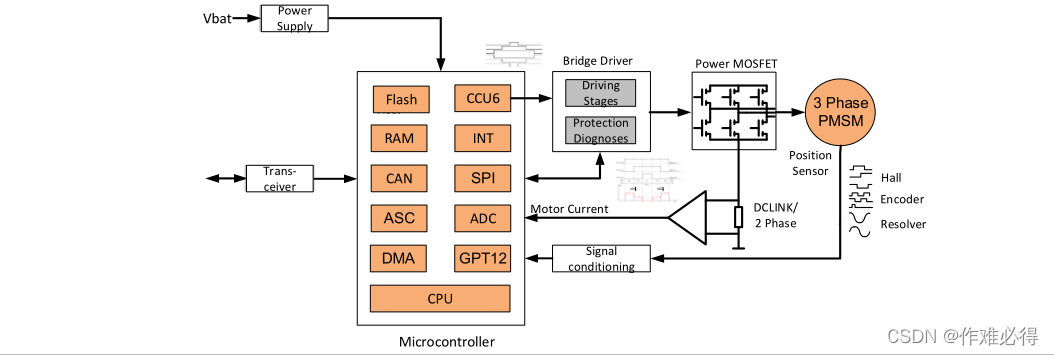
五、CCU6 系统集成
5.1 概述
捕获/比较单元CCU6生成DC转换以测量电流
电机控制不需要外部资源(所有模块都集成在AURIX™)
位置识别可以通过霍尔传感器(CCU6)、编码器(GPT12)和分解器(DSADC)实现
ADC的同步触发由CCU6完成
控制PMSM/无刷直流电机的所有模块都是芯片(AURIX™)
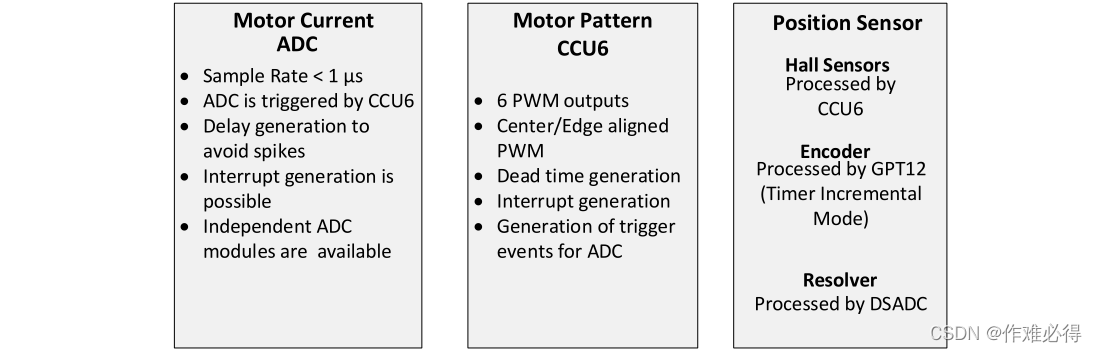
六、 应用实例无刷直流驱动应用
1.捕获/比较单元CCU6生成PWM模式以转动电机
2.以较少的CPU交互生成不同的PWM模式
3.根据霍尔传感器提供的位置,自动生成下一个排列模式
4.ADC转换的同步触发
5.传感器(无)无刷直流电机应用的处理
(完)


















 1061
1061

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









