







将Autodesk Revit BIM模型连接到NavVis现实捕获技术,以从您的桌面更有效地进行内置验证工作流。
即使他们具有使用BIM模型和点云的高级知识,更新现有建筑物的BIM模型也可能是一项耗时的任务,无论是需要物理访问某个位置进行测量和拍照,还是使用可能不需要的点云提供现场访问的详细程度。
如果要从头开始为现有建筑物创建BIM模型,那么建成后的文档通常会过时且分散。BIM建模人员将花费大量精力精心地将数据拼凑在一起,以创建一个内聚的BIM模型,即使如此,该模型也不总是可信赖的。
NavVis提供了一个多合一的解决方案,可以捕获并可视化构建的环境。
借助用于Autodesk Revit的NavVis IndoorViewer外接程序,用户现在可以通过将Revit模型连接到显示建筑物当前状态的360°沉浸图像和点云来改善BIM工作流程。
什么是Autodesk Revit的NavVis IndoorViewer加载项?
用于Autodesk Revit的NavVis IndoorViewer加载项可优化创建和更新现有建筑物的BIM模型的工作流程。
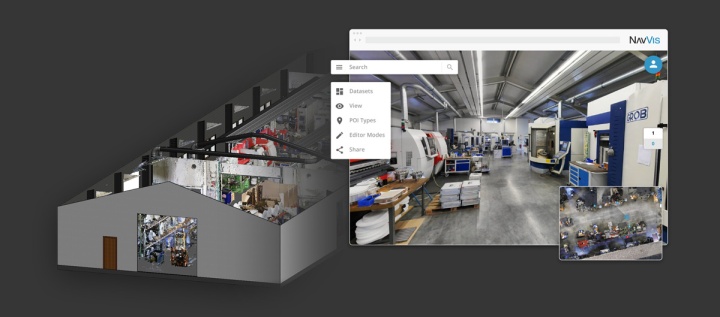
该插件将BIM模型连接到NavVis IndoorViewer 3D可视化软件,该软件可将3D扫描显示为全景图像并在浏览器中显示点云。
该插件使您可以直接在Autodesk Revit中查看BIM模型和相应的NavVis IndoorViewer实例的并排比较。
它可
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3255
3255











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









