






 本文探讨了GNSS干扰信号识别的重要性,并介绍了从传统信号处理到机器学习,尤其是深度学习的发展。提出了基于深度卷积神经网络的智能识别算法,通过时频特征的二维能量分布和自动特征提取,实现了高精度的干扰类型识别,尤其在低功率干扰信号的识别中表现出色。
本文探讨了GNSS干扰信号识别的重要性,并介绍了从传统信号处理到机器学习,尤其是深度学习的发展。提出了基于深度卷积神经网络的智能识别算法,通过时频特征的二维能量分布和自动特征提取,实现了高精度的干扰类型识别,尤其在低功率干扰信号的识别中表现出色。
燕新宇 陈新副教授指导
前言
………………………………………………………………
到达地面功率微弱的卫星导航信号极易受到压制式干扰,导致定位精度下降甚至导航功能完全失常。涉及到GNSS干扰监测技术研究[1],干扰信号类型识别算法成为研究热点,其能为干扰抑制以及干扰源定位提供必要的先验信息。近年来,干扰类型识别算法由传统信号处理领域发展到机器学习,并逐渐在深度学习领域初露峥嵘[2]。
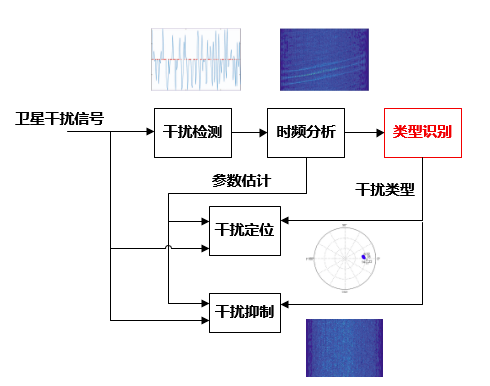
图1. 干扰监测技术组成示意图
目前干扰识别算法的总体思路为:首先将干扰信号变换到观察空间进行预处理,然后在变换域进行基于特征分析的特征参数提取,最后根据提取的特征参数进行干扰信号分类设计。然而目前算法存在三个弊端:一是算法性能严重依赖于所人工设计以及甄选的特征参数,缺乏必要的兼容性;二是传统算法在实际测试低功率干扰信号的识别精度较低;三是覆盖整个导航频带的高斯噪声干扰与未受干扰卫星信号的混淆分类难点。
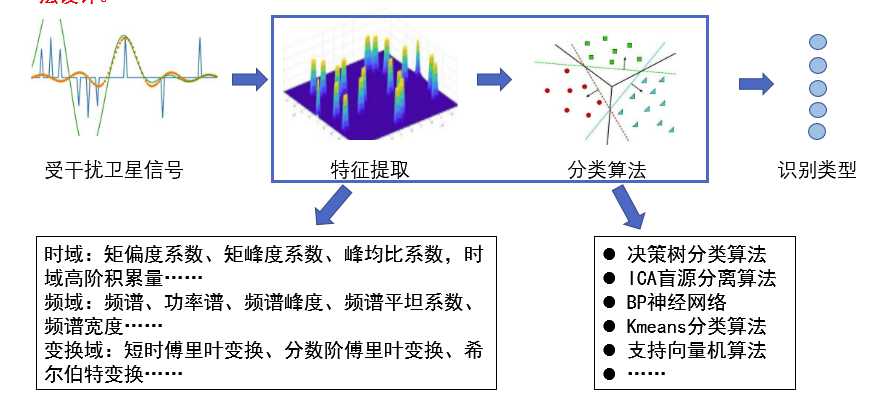
图2. 传统干扰识别算法流程
卷积神经网络识别算法实现图像端到端的分类识别,其最大优势在于图像原始浅层次特征到深层次特征的自动提取映射。借鉴于此,本文提出基于深度卷积神经网络的干扰源智能识别算法,目的在于实现干扰原始信号的深层次特征自动提取,最终实现与干扰源类型的一一映射。
传统识别算法概述
………………………………………………………………
传统信号处理识别算法的基本原理是基于必要的信号先验信息,提取时域、频域与变换域的一维数值特征实现基于固定判决门限的决策树分类识别[3]。
涉及到传统机器学习领域,总体分为两种思路:一是将所提取的数值特征(峰度、偏度等时域特征以及频谱宽度、平坦度等频域特征)作为整体多维特征向量,应用SVM、BP神经网络算法实现干扰信号分类[4];
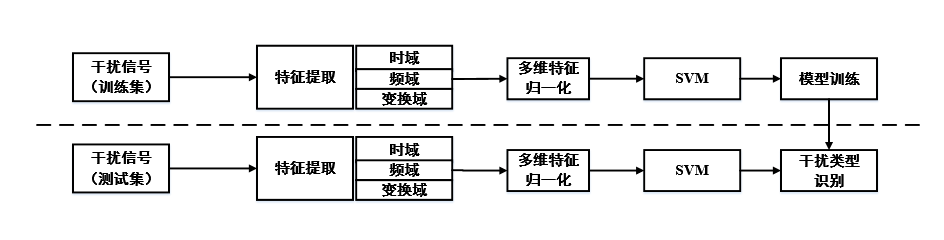 图3.基于时域与频域特征的干扰分类算法原理
图3.基于时域与频域特征的干扰分类算法原理
二是将时频变换域的能量分布转换为相应的RGB图像,应用图像分类算法实现干扰信号识别任务的映射,其原理如图所示[5][6]:

图4.基于时频图像的干扰信号分类算法原理
基于深度卷积神经网络的智能识别算法
………………………………………………………………
本文提出基于深度卷积神经网络的GNSS干扰源智能识别技术,提取原始时频特征的二维能量分布并构建卷积神经网络实现典型类型压制式干扰的匹配识别。其算法流程如下所示:
干扰信号按照信号带宽相对于GNSS信号带宽的大小,划分为六种类型[7]:单频干扰、多频干扰、扫频干扰、噪声调频干扰(窄带)、高斯噪声干扰(宽带)以及脉冲干扰。随后依据射频前端采样量化的数字中频信号构建典型类型干扰信号数据库。
为了消除实信号的正负频率交叉项的影响,首先应用Hilbert变换[8]获取相应的解析信号,并应用平滑伪魏格纳威利变换(SPWVD)算法[9]实现二维时频特征提取。
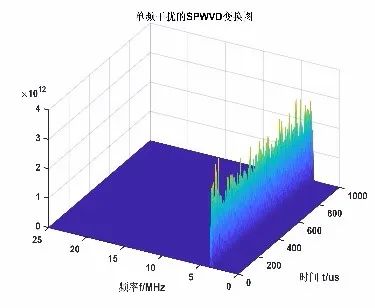
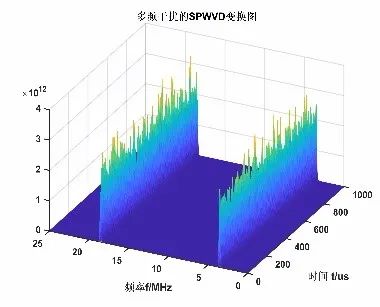
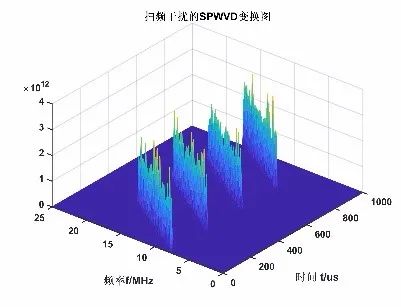
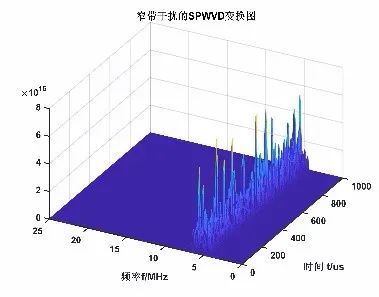
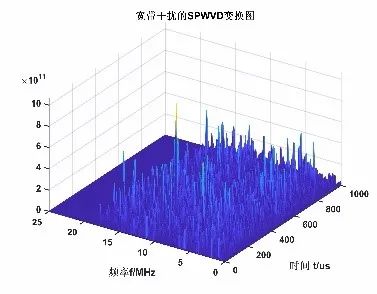
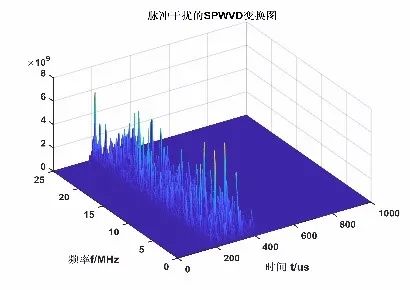
图5. 六种类型的SPWVD变换示意图
(左上:单频干扰;中上:多频干扰;右上:扫频干扰;左下:窄带干扰;中下:宽带干扰;右下:脉冲干扰)
为降低特征的维度复杂度以及提高算法的应用效率,本文借鉴图像降维算法应用双线性三次插值算法实现特征降维,并以幅值最大值最小值归一化算法将不同数量级的特征缩放到[0,1]之间,如图所示:
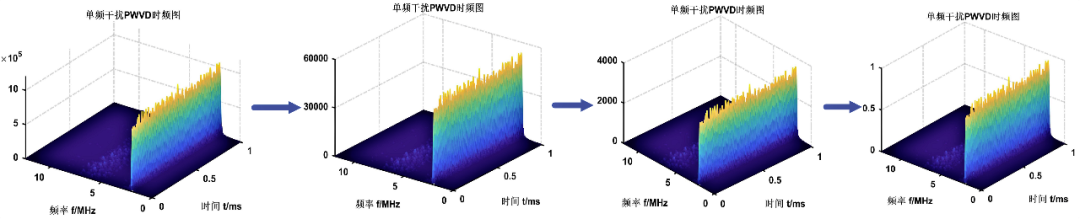
图6. 时频特征降维以及归一化示意图(1.特征降维;2.特征归一化)
本文将无干扰作为特殊的干扰类型,设计基于AGC[10]和SPWVD的联合特征,实现干扰检测与类型识别的同步整合,如图所示:
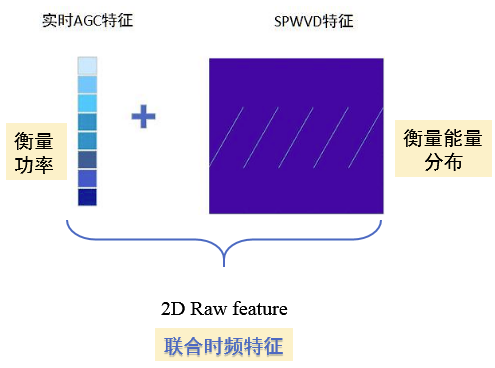
图7.所构建的联合检测与识别2D特征
为了实现原始二维特征的深层次提取以及实现自动类型识别,借鉴GoogLeNet-V3模型[11]的架构,本文设计基于2D联合特征的干扰类型匹配识别网络,其网络架构如下所示:
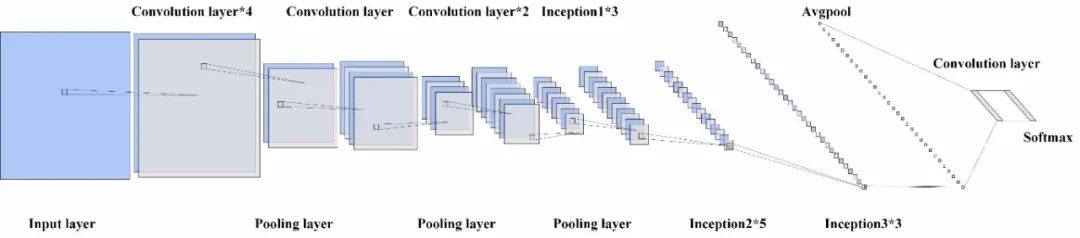
图8 基于2D联合特征的干扰类型匹配识别网络
当深度卷积神经网络训练完毕后,提取一段未知类型的干扰信号加载所训练完毕的模型实现在线识别,其算法识别精度如图所示:
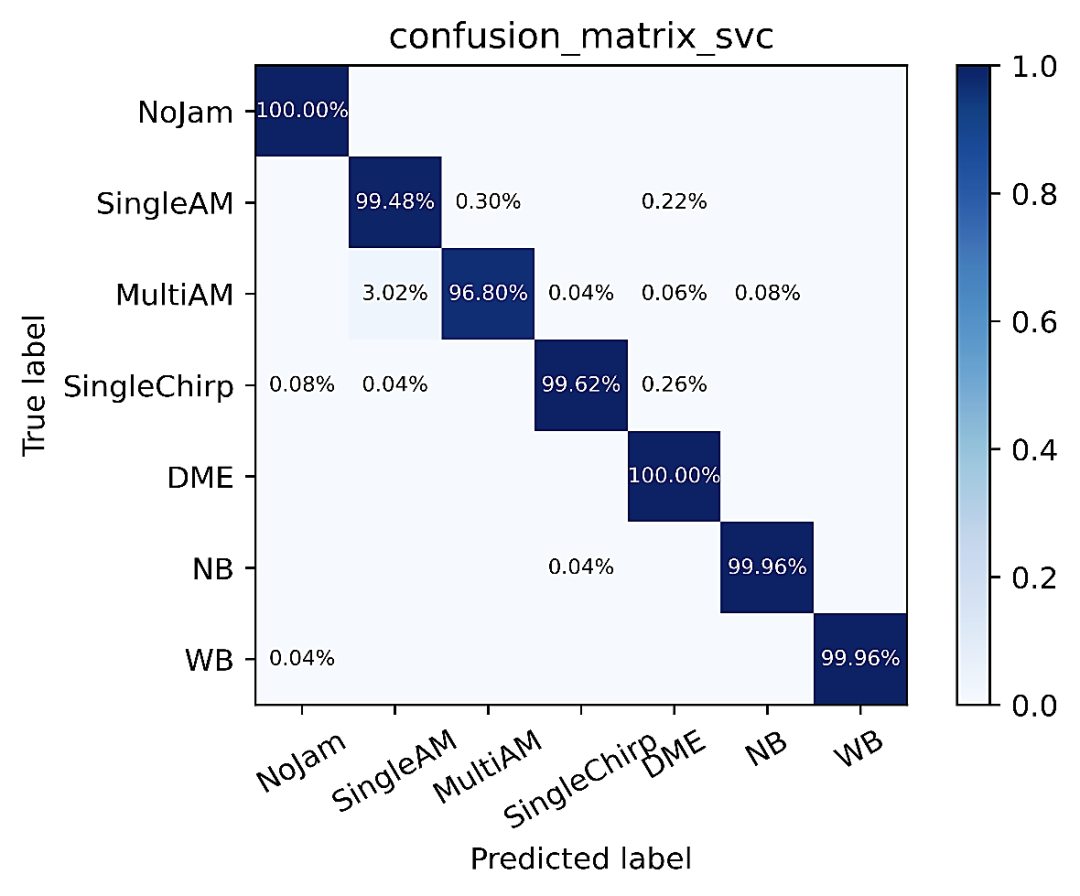
图9.七种类型干扰信号(包括无干扰信号)的混淆矩阵
(每一行代表测试集样本实际类别标签,每一列代表模型预测所类别标签)
经计算,七种类型干扰信号在干扰功率[-110dBm,-60dBm]之间的总体识别精度达到99%。
总结
………………………………………………………………
本文提出的算法在低功率条件下干扰信号类型识别准确率较前两者有较大提升且改进特征提取模块的特征筛选以及分类算法固有门限阈值的弊端,此外本文的算法易于实现在线实时化类型识别。
参考文献
[1] Borio,D.; Dovis, F.; Kuusniemi, H.; Presti, L.L. “Impact and Detection of GNSSJammers on Consumer Grade Satellite Navigation Receivers”. Proc. IEEE 2016,104, 1233–1245.
[2] R. Morales-Ferre, P. Richter, E. Falletti,A. de la Fuente and E. S. Lohan, "A Survey on Coping With IntentionalInterference in Satellite Navigation for Manned and Unmanned Aircraft". inIEEE Communications Surveys & Tutorials, vol. 22, no. 1, pp.249-291, Firstquarter 2020, doi: 10.1109/COMST.2019.2949178.
[3] Zhang X., Zhang G., Wang H., Li G. (2020) “Two-StageNeural Network Based Combined Interference Classification and Recognition for aGNSS Receiver”. In: Sun J., Yang C., Xie J. (eds) China Satellite NavigationConference (CSNC) 2020 Proceedings: Volume III. CSNC 2020. Lecture Notes inElectrical Engineering, vol 652. Springer, Singapore. https://doi.org/10.1007/978-981-15-3715-8_56
[4] B. Yu, G. -p. Shao and H. -s. Sun,"Notice of Retraction: An automatic interference recognition method inDSSS communication system based on SVM," 2010 2nd InternationalConference on Computer Engineering and Technology, Chengdu, 2010, pp.V3-4-V3-8, doi: 10.1109/ICCET.2010.5485741
[5] Morales Ferre, R.;de la Fuente, A.; Lohan, E.S. “Jammer Classification in GNSS Bands Via MachineLearning Algorithms.” Sensors 2019, 19, 4841
[6] Li, Ming , Q. Ren, and J. Wu . "Interference classification and identification of TDCSbased on improved convolutional neural network." Journal of Physics:Conference Series 1651.1(2020):012155 (9pp)
[7] Xue, R.; Liu, J.; Tang, H. “Two-DimensionalJamming Recognition Algorithm Based on the Sevcik Fractal Dimension and EnergyConcentration Property for UAV Frequency Hopping Systems”. Information 2020,11, 520
[8] Borio, D. , Camoriano, L. , Savasta, S. ,& Presti, L. L.. “Time-Frequency Excisionfor GNSS Applications.” IEEE systems journal, 2008,2(1):p.27-37.
[9] Wang, P. , Cetin, E. , Dempster, A. G. ,Wang, Y. , & Wu, S. ,. "Time Frequency and Statistical Inference BasedInterference Detection Technique for GNSS Receivers." IEEE Transactions onAerospace and Electronic Systems 53.6(2017):2865-2876
[10] Frédéric Bastide, Dennis Akos, ChristopheMacabiau, Benoit Roturier. “Automatic gain control (AGC) as an interferenceassessment tool”. ION GPS/GNSS 2003, 16th International Technical Meeting ofthe Satellite Division of The Institute of Navigation, Sep 2003, Portland,United States. pp 2042 - 2053.
[11] Szegedy, C., Liu, W., Jia, Y., Sermanet,P., Reed, S., Anguelov, D., & Rabinovich, A.. “Goingdeeper with convolutions”. In Proceedings of theIEEE conference on computer vision and pattern recognition .2015.pp. 1-9.

















 778
778

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









