







1. 进程的创建
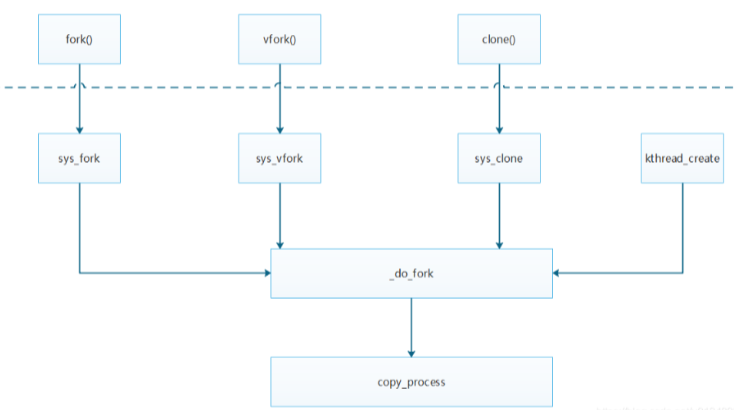
clone()、fork()、及vfork()系统调用:在 Linux中,轻量级进程是由名为 clone()的函数创建的。do_fork()函数负责处理 clone()、fork()和 vfork()系统调用。

1.1 _do_fork()函数
_do_fork()函数有6个参数:具体含义为:

#define CLONE_VM 0x00000100 /* 父、子进程共享进程地址空间set if VM shared between processes */
#define CLONE_FS 0x00000200 /*父、子进程共享文件系统信息 set if fs info shared between processes */
#define CLONE_FILES 0x00000400 /*父、子进程共享打开的文件 set if open files shared between processes */
#define CLONE_SIGHAND 0x00000800 /* 父、子进程共享信号处理函数以及被阻塞的信号set if signal handlers and blocked signals shared */
#define CLONE_PTRACE 0x00002000 /*父进程被跟踪、子进程也会被跟踪 set if we want to let tracing continue on the child too */
#define CLONE_VFORK 0x00004000 /*在创建子进程时启用Linux内核的完成量机制,wait_for_completion会使父进程进入睡眠状态,直到子进程调用execve或exit释放内存 set if the parent wants the child to wake it up on mm_release */
#define CLONE_IO 0x80000000 /* 复制I/O上下文Clone io context */_do_fork()函数主要是调用copy_process函数来创建子进程的task_struct数据结构,以及从父进程复制必要的内容到子进程的task_struct数据结构中,完成子进程的创建,如下图所示:
long _do_fork(unsigned long clone_flags,
unsigned long stack_start,
unsigned long stack_size,
int __user *parent_tidptr,
int __user *child_tidptr,
unsigned long tls)
{
struct task_struct *p;
int trace = 0;
long nr;
/*
* Determine whether and which event to report to ptracer. When
* called from kernel_thread or CLONE_UNTRACED is explicitly
* requested, no event is reported; otherwise, report if the event
* for the type of forking is enabled.
*/
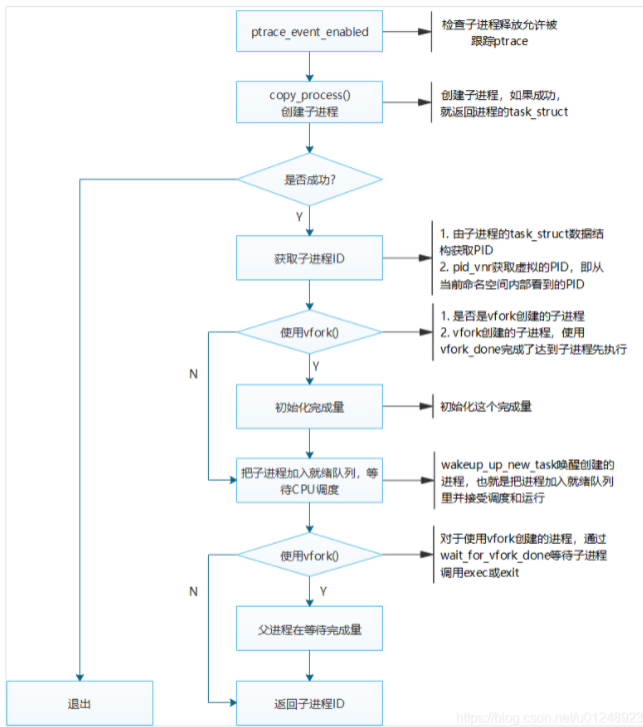
//第一步、检查子进程是否允许被跟踪
if (!(clone_flags & CLONE_UNTRACED)) {
if (clone_flags & CLONE_VFORK)
trace = PTRACE_EVENT_VFORK;
else if ((clone_flags & CSIGNAL) != SIGCHLD)
trace = PTRACE_EVENT_CLONE;
else
trace = PTRACE_EVENT_FORK;
if (likely(!ptrace_event_enabled(current, trace)))
trace = 0;
}
//第二步、复制进程描述符,返回的是新的进程描述符的地址
p = copy_process(clone_flags, stack_start, stack_size,
child_tidptr, NULL, trace, tls);
/*
* Do this prior waking up the new thread - the thread pointer
* might get invalid after that point, if the thread exits quickly.
*/
//第三步、初始化完成量
if (!IS_ERR(p)) {
struct completion vfork;
struct pid *pid;
trace_sched_process_fork(current, p);
//1. 由子进程的task_struct数据结构来获取PID
pid = get_task_pid(p, PIDTYPE_PID);
//2. pid_vnr获取虚拟的PID,即从当前命令空间内部看到的PID
nr = pid_vnr(pid);
if (clone_flags & CLONE_PARENT_SETTID)
put_user(nr, parent_tidptr);
//3. init_completion初始化完成量
if (clone_flags & CLONE_VFORK) {
p->vfork_done = &vfork;
init_completion(&vfork);
get_task_struct(p);
}
//第四步、唤醒新进程:就是把进程加入就绪队列里并接受调度、运行。
wake_up_new_task(p);
/* forking complete and child started to run, tell ptracer */
//第五步、等待子进程完成
if (unlikely(trace))
ptrace_event_pid(trace, pid);
//对于使用vfork(),wait_for_vfork_done函数等待子进程调用exec()或exit()
if (clone_flags & CLONE_VFORK) {
if (!wait_for_vfork_done(p, &vfork))
ptrace_event_pid(PTRACE_EVENT_VFORK_DONE, pid);
}
put_pid(pid);
} else {
nr = PTR_ERR(p);
}
return nr; //第六步、返回子进程的ID
}在父进程返回用户空间时,其返回子进程的ID,子进程返回用户空间时,其返回值为0。do_fork函数执行后就存在两个进程,而且每个进程都会从 _do_fork函数的返回处执行。程序可以通过fork的返回值来区分父、子进程,父进程返回新创建的子进程的ID,子进程,返回0。
1.2copy_process()函数
/*
* This creates a new process as a copy of the old one,
* but does not actually start it yet.
*
* It copies the registers, and all the appropriate
* parts of the process environment (as per the clone
* flags). The actual kick-off is left to the caller.
*/
static struct task_struct *copy_process(unsigned long clone_flags,
unsigned long stack_start,
unsigned long stack_size,
int __user *child_tidptr,
struct pid *pid,
int trace,
unsigned long tls)
{
int retval;
struct task_struct *p;
void *cgrp_ss_priv[CGROUP_CANFORK_COUNT] = {};
//第一步、标志位检查
// 1. CLONE_NEWS表明父子进程不共享mount的命名空间,每个进程可以拥有属于自己的mount空间
if ((clone_flags & (CLONE_NEWNS|CLONE_FS)) == (CLONE_NEWNS|CLONE_FS))
return ERR_PTR(-EINVAL);
// 2. CLONE_NEWUSER表示子进程要创建新的user命名空间,USER命令空间用于管理USER ID和Group ID的映射,起到隔离的作用
if ((clone_flags & (CLONE_NEWUSER|CLONE_FS)) == (CLONE_NEWUSER|CLONE_FS))
return ERR_PTR(-EINVAL);
/*
* Thread groups must share signals as well, and detached threads
* can only be started up within the thread group.
*/
// 3. CLONE_THREAD表示父子进程在同一个线程组里,POSIX标准规定在一个进程的内部,多个线程共享一个PID,但是linux为每个线程和进程都分配了PID
if ((clone_flags & CLONE_THREAD) && !(clone_flags & CLONE_SIGHAND))
return ERR_PTR(-EINVAL);
/*
* Shared signal handlers imply shared VM. By way of the above,
* thread groups also imply shared VM. Blocking this case allows
* for various simplifications in other code.
*/
// 4. CLONE_SIGHAND表明父子进程共享相同的信号处理表,CLONE_VM表明父子进程共享内存空间
if ((clone_flags & CLONE_SIGHAND) && !(clone_flags & CLONE_VM))
return ERR_PTR(-EINVAL);
/*
* Siblings of global init remain as zombies on exit since they are
* not reaped by their parent (swapper). To solve this and to avoid
* multi-rooted process trees, prevent global and container-inits
* from creating siblings.
*/
// 5. CLONE_PARENT表明新创建的进程是兄弟关系,而不是父子关系,他们拥有相同的父进程
if ((clone_flags & CLONE_PARENT) &&
current->signal->flags & SIGNAL_UNKILLABLE)
return ERR_PTR(-EINVAL);
/*
* If the new process will be in a different pid or user namespace
* do not allow it to share a thread group with the forking task.
*/
// 6. CLONE_NEWPID表明创建一个新的PID命名空间
if (clone_flags & CLONE_THREAD) {
if ((clone_flags & (CLONE_NEWUSER | CLONE_NEWPID)) ||
(task_active_pid_ns(current) !=
current->nsproxy->pid_ns_for_children))
return ERR_PTR(-EINVAL);
}
retval = security_task_create(clone_flags);
if (retval)
goto fork_out;
retval = -ENOMEM;
//第二步,为子进程获取进程描述符
p = dup_task_struct(current);
if (!p)
goto fork_out;
//第三步、复制父进程: user数据结构中的processes成员记录了该用户的进程数,这里检查进程数是否超过了进程资源的限制RLIMIT_NPROC
ftrace_graph_init_task(p);
rt_mutex_init_task(p);
#ifdef CONFIG_PROVE_LOCKING
DEBUG_LOCKS_WARN_ON(!p->hardirqs_enabled);
DEBUG_LOCKS_WARN_ON(!p->softirqs_enabled);
#endif
retval = -EAGAIN;
// 1. 检查进程数是否超过限制,由操作系统定义
if (atomic_read(&p->real_cred->user->processes) >=
task_rlimit(p, RLIMIT_NPROC)) {
if (p->real_cred->user != INIT_USER &&
!capable(CAP_SYS_RESOURCE) && !capable(CAP_SYS_ADMIN))
goto bad_fork_free;
}
current->flags &= ~PF_NPROC_EXCEEDED;
//2. 复制父进程
retval = copy_creds(p, clone_flags);
if (retval < 0)
goto bad_fork_free;
/*
* If multiple threads are within copy_process(), then this check
* triggers too late. This doesn't hurt, the check is only there
* to stop root fork bombs.
*/
retval = -EAGAIN;
// 检查进程数量是否超过max_threads,后者取决于内存的大小
if (nr_threads >= max_threads)
goto bad_fork_cleanup_count;
```//第四步、初始化task_stcut//初始化子进程描述符中的list_head数据结构和自旋锁,并为与挂起信号、定时器及时间统计表相关的几个字段赋初值。
delayacct_tsk_init(p); /* Must remain after dup_task_struct() */
p->flags &= ~(PF_SUPERPRIV | PF_WQ_WORKER);
p->flags |= PF_FORKNOEXEC;
INIT_LIST_HEAD(&p->children);
INIT_LIST_HEAD(&p->sibling);
rcu_copy_process(p);
p->vfork_done = NULL;
spin_lock_init(&p->alloc_lock);
init_sigpending(&p->pending);
p->utime = p->stime = p->gtime = 0;
p->utimescaled = p->stimescaled = 0;
prev_cputime_init(&p->prev_cputime);
#ifdef CONFIG_VIRT_CPU_ACCOUNTING_GEN
seqlock_init(&p->vtime_seqlock);
p->vtime_snap = 0;
p->vtime_snap_whence = VTIME_SLEEPING;
#endif
#if defined(SPLIT_RSS_COUNTING)
memset(&p->rss_stat, 0, sizeof(p->rss_stat));
#endif
p->default_timer_slack_ns = current->timer_slack_ns;
task_io_accounting_init(&p->ioac);
acct_clear_integrals(p);
posix_cpu_timers_init(p);
p->start_time = ktime_get_ns();
p->real_start_time = ktime_get_boot_ns();
p->io_context = NULL;
p->audit_context = NULL;
if (clone_flags & CLONE_THREAD)
threadgroup_change_begin(current);
cgroup_fork(p);
#ifdef CONFIG_NUMA
p->mempolicy = mpol_dup(p->mempolicy);
if (IS_ERR(p->mempolicy)) {
retval = PTR_ERR(p->mempolicy);
p->mempolicy = NULL;
goto bad_fork_cleanup_threadgroup_lock;
}
#endif
#ifdef CONFIG_CPUSETS
p->cpuset_mem_spread_rotor = NUMA_NO_NODE;
p->cpuset_slab_spread_rotor = NUMA_NO_NODE;
seqcount_init(&p->mems_allowed_seq);
#endif
#ifdef CONFIG_TRACE_IRQFLAGS
p->irq_events = 0;
p->hardirqs_enabled = 0;
p->hardirq_enable_ip = 0;
p->hardirq_enable_event = 0;
p->hardirq_disable_ip = _THIS_IP_;
p->hardirq_disable_event = 0;
p->softirqs_enabled = 1;
p->softirq_enable_ip = _THIS_IP_;
p->softirq_enable_event = 0;
p->softirq_disable_ip = 0;
p->softirq_disable_event = 0;
p->hardirq_context = 0;
p->softirq_context = 0;
#endif
p->pagefault_disabled = 0;
#ifdef CONFIG_LOCKDEP
p->lockdep_depth = 0; /* no locks held yet */
p->curr_chain_key = 0;
p->lockdep_recursion = 0;
#endif
#ifdef CONFIG_DEBUG_MUTEXES
p->blocked_on = NULL; /* not blocked yet */
#endif
#ifdef CONFIG_BCACHE
p->sequential_io = 0;
p->sequential_io_avg = 0;
#endif
/* Perform scheduler related setup. Assign this task to a CPU. */
// 第五步、完成调度器相关数据结构的初始化
//sched_fork函数初始化与进程调度相关的数据结构,调度实体用sched_entity数据结构来抽象,每个进程或线程都是一个调度实体。
retval = sched_fork(clone_flags, p);
if (retval)
goto bad_fork_cleanup_policy;
//第六步、初始化task_struct结构的其他数据结构
retval = perf_event_init_task(p);
if (retval)
goto bad_fork_cleanup_policy;
retval = audit_alloc(p);
if (retval)
goto bad_fork_cleanup_perf;
/* copy all the process information */
// 拷贝所有的进程信息
shm_init_task(p);
retval = copy_semundo(clone_flags, p);
if (retval)
goto bad_fork_cleanup_audit;
//1.主要用于复制一个进程打开的文件信息。这些信息用一个结构 files_struct 来维护,每个打开的文件都有一个文件描述符
retval = copy_files(clone_flags, p);
if (retval)
goto bad_fork_cleanup_semundo;
//2.主要用于复制一个进程的目录信息。这些信息用一个结构 fs_struct 来维护。一个进程有自己的根目录和根文件系统 root,也有当前目录 pwd 和当前目录的文件系统,都在 fs_struct 里面维护。
retval = copy_fs(clone_flags, p);
if (retval)
goto bad_fork_cleanup_files;
//3.会分配一个新的 sighand_struct。这里最主要的是维护信号处理函数,在 copy_sighand 里面会调用 memcpy,将信号处理函数 sighand->action 从父进程复制到子进程。
retval = copy_sighand(clone_flags, p);
if (retval)
goto bad_fork_cleanup_fs;
//4.copy_signal 用于初始化,并且复制用于维护发给这个进程的信号的数据结构。copy_signal 函数会分配一个新的 signal_struct,并进行初始化。
retval = copy_signal(clone_flags, p);
if (retval)
goto bad_fork_cleanup_sighand;
//5.copy_mm 函数中调用 dup_mm,分配一个新的 mm_struct 结构,调用 memcpy 复制这个结构。dup_mmap 用于复制内存空间中内存映射的部分。
retval = copy_mm(clone_flags, p);
if (retval)
goto bad_fork_cleanup_signal;
//6.复制父进程的命名地址空间
retval = copy_namespaces(clone_flags, p);
if (retval)
goto bad_fork_cleanup_mm;
//7.复制父进程与I/O相关的内容
retval = copy_io(clone_flags, p);
if (retval)
goto bad_fork_cleanup_namespaces;
//8.复制父进程的内核堆信息
retval = copy_thread_tls(clone_flags, stack_start, stack_size, p, tls);
if (retval)
goto bad_fork_cleanup_io;
if (pid != &init_struct_pid) {
pid = alloc_pid(p->nsproxy->pid_ns_for_children);
if (IS_ERR(pid)) {
retval = PTR_ERR(pid);
goto bad_fork_cleanup_io;
}
}
p->set_child_tid = (clone_flags & CLONE_CHILD_SETTID) ? child_tidptr : NULL;
/*
* Clear TID on mm_release()?
*/
p->clear_child_tid = (clone_flags & CLONE_CHILD_CLEARTID) ? child_tidptr : NULL;
#ifdef CONFIG_BLOCK
p->plug = NULL;
#endif
#ifdef CONFIG_FUTEX
p->robust_list = NULL;
#ifdef CONFIG_COMPAT
p->compat_robust_list = NULL;
#endif
INIT_LIST_HEAD(&p->pi_state_list);
p->pi_state_cache = NULL;
#endif
/*
* sigaltstack should be cleared when sharing the same VM
*/
if ((clone_flags & (CLONE_VM|CLONE_VFORK)) == CLONE_VM)
p->sas_ss_sp = p->sas_ss_size = 0;
/*
* Syscall tracing and stepping should be turned off in the
* child regardless of CLONE_PTRACE.
*/
user_disable_single_step(p);
clear_tsk_thread_flag(p, TIF_SYSCALL_TRACE);
#ifdef TIF_SYSCALL_EMU
clear_tsk_thread_flag(p, TIF_SYSCALL_EMU);
#endif
clear_all_latency_tracing(p);
/* ok, now we should be set up.. */
//第七步、设置子进程的PID
p->pid = pid_nr(pid);
// 根据是创建线程还是进程设置线程组组长、进程组组长等等信息
if (clone_flags & CLONE_THREAD) {
p->exit_signal = -1;
p->group_leader = current->group_leader;
p->tgid = current->tgid;
} else {
if (clone_flags & CLONE_PARENT)
p->exit_signal = current->group_leader->exit_signal;
else
p->exit_signal = (clone_flags & CSIGNAL);
p->group_leader = p;
p->tgid = p->pid;
}
p->nr_dirtied = 0;
p->nr_dirtied_pause = 128 >> (PAGE_SHIFT - 10);
p->dirty_paused_when = 0;
p->pdeath_signal = 0;
INIT_LIST_HEAD(&p->thread_group);
p->task_works = NULL;
/*
* Ensure that the cgroup subsystem policies allow the new process to be
* forked. It should be noted the the new process's css_set can be changed
* between here and cgroup_post_fork() if an organisation operation is in
* progress.
*/
retval = cgroup_can_fork(p, cgrp_ss_priv);
if (retval)
goto bad_fork_free_pid;
/*
* Make it visible to the rest of the system, but dont wake it up yet.
* Need tasklist lock for parent etc handling!
*/
write_lock_irq(&tasklist_lock);
/* CLONE_PARENT re-uses the old parent */
if (clone_flags & (CLONE_PARENT|CLONE_THREAD)) {
p->real_parent = current->real_parent;
p->parent_exec_id = current->parent_exec_id;
} else {
p->real_parent = current;
p->parent_exec_id = current->self_exec_id;
}
spin_lock(¤t->sighand->siglock);
/*
* Copy seccomp details explicitly here, in case they were changed
* before holding sighand lock.
*/
copy_seccomp(p);
/*
* Process group and session signals need to be delivered to just the
* parent before the fork or both the parent and the child after the
* fork. Restart if a signal comes in before we add the new process to
* it's process group.
* A fatal signal pending means that current will exit, so the new
* thread can't slip out of an OOM kill (or normal SIGKILL).
*/
recalc_sigpending();
if (signal_pending(current)) {
spin_unlock(¤t->sighand->siglock);
write_unlock_irq(&tasklist_lock);
retval = -ERESTARTNOINTR;
goto bad_fork_cancel_cgroup;
}
//将pid加入PIDTYPE_PID这个散列表
if (likely(p->pid)) {
ptrace_init_task(p, (clone_flags & CLONE_PTRACE) || trace);
init_task_pid(p, PIDTYPE_PID, pid);
if (thread_group_leader(p)) {
init_task_pid(p, PIDTYPE_PGID, task_pgrp(current));
init_task_pid(p, PIDTYPE_SID, task_session(current));
if (is_child_reaper(pid)) {
ns_of_pid(pid)->child_reaper = p;
p->signal->flags |= SIGNAL_UNKILLABLE;
}
p->signal->leader_pid = pid;
p->signal->tty = tty_kref_get(current->signal->tty);
list_add_tail(&p->sibling, &p->real_parent->children);
list_add_tail_rcu(&p->tasks, &init_task.tasks);
attach_pid(p, PIDTYPE_PGID);
attach_pid(p, PIDTYPE_SID);
__this_cpu_inc(process_counts);
} else {
current->signal->nr_threads++;
atomic_inc(¤t->signal->live);
atomic_inc(¤t->signal->sigcnt);
list_add_tail_rcu(&p->thread_group,
&p->group_leader->thread_group);
list_add_tail_rcu(&p->thread_node,
&p->signal->thread_head);
}
//把新进程的PID插入pidhash[PIDTYPE_PID]散列表中
attach_pid(p, PIDTYPE_PID);
nr_threads++;
}
total_forks++;
spin_unlock(¤t->sighand->siglock);
syscall_tracepoint_update(p);
write_unlock_irq(&tasklist_lock);
proc_fork_connector(p);
cgroup_post_fork(p, cgrp_ss_priv);
if (clone_flags & CLONE_THREAD)
threadgroup_change_end(current);
perf_event_fork(p);
trace_task_newtask(p, clone_flags);
uprobe_copy_process(p, clone_flags);
return p;//第八步,返回进程描述符
bad_fork_cancel_cgroup:
cgroup_cancel_fork(p, cgrp_ss_priv);
bad_fork_free_pid:
if (pid != &init_struct_pid)
free_pid(pid);
bad_fork_cleanup_io:
if (p->io_context)
exit_io_context(p);
bad_fork_cleanup_namespaces:
exit_task_namespaces(p);
bad_fork_cleanup_mm:
if (p->mm)
mmput(p->mm);
bad_fork_cleanup_signal:
if (!(clone_flags & CLONE_THREAD))
free_signal_struct(p->signal);
bad_fork_cleanup_sighand:
__cleanup_sighand(p->sighand);
bad_fork_cleanup_fs:
exit_fs(p); /* blocking */
bad_fork_cleanup_files:
exit_files(p); /* blocking */
bad_fork_cleanup_semundo:
exit_sem(p);
bad_fork_cleanup_audit:
audit_free(p);
bad_fork_cleanup_perf:
perf_event_free_task(p);
bad_fork_cleanup_policy:
#ifdef CONFIG_NUMA
mpol_put(p->mempolicy);
bad_fork_cleanup_threadgroup_lock:
#endif
if (clone_flags & CLONE_THREAD)
threadgroup_change_end(current);
delayacct_tsk_free(p);
bad_fork_cleanup_count:
atomic_dec(&p->cred->user->processes);
exit_creds(p);
bad_fork_free:
free_task(p);
fork_out:
return ERR_PTR(retval);
}2. 内核线程
在 Linux中,内核线程在以下几方面不同于普通进程:内核线程只运行在内核态,而普通进程既可以运行在内核态,也可以运行在用户态因为内核线程只运行在内核态,它们只使用大于PAGE_ OFFSET的线性地址空间。另一方面,不管在用户态还是在内核态,普通进程可以用4GB的线性地址空间。
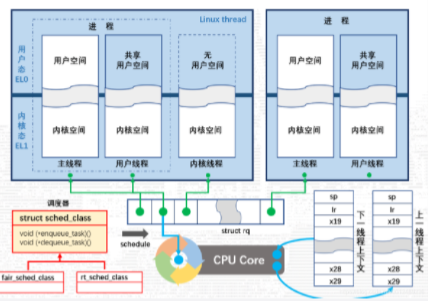
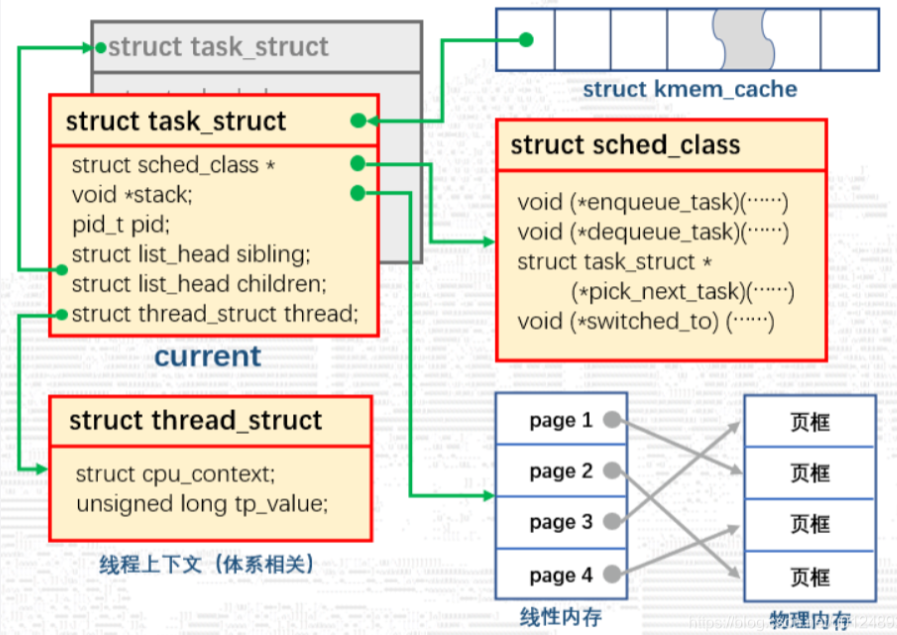
2.1 线程主要数据结构
2.2用户线程与内核线程
linux用户线程(属于用户进程),都是在用户空间创建,虽然线程是内核调度的基本单位,但是用户线程的堆栈并不是由内核管理,它是由系统库创建和管理。所以,用户的线程的资源是由用户库来管理的,和内核线程堆没有必然的关系,唯一依赖的就是靠内核的线程对象来调度执行。详细的过程参考pthread的库实现,其最终会调用到底层的clone接口。
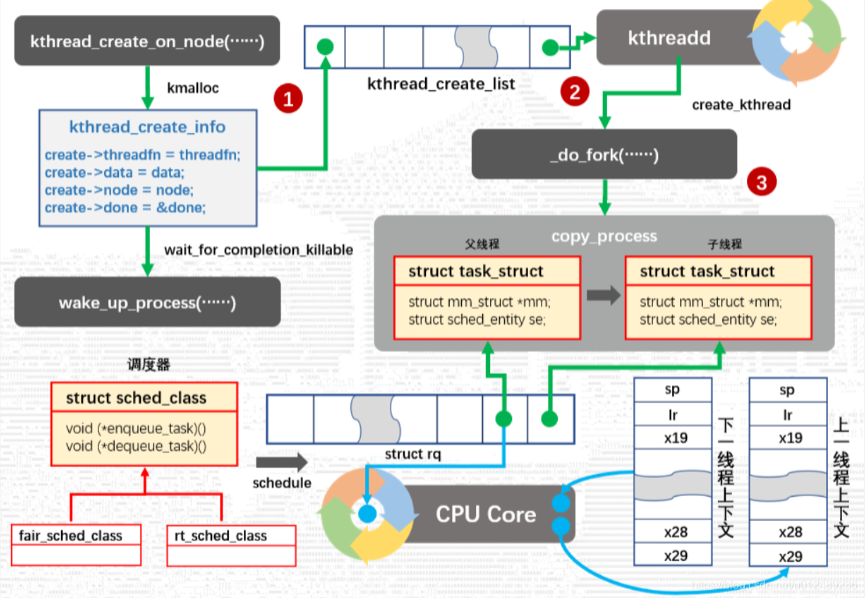
创建内核线程:kthread_create_on_node()
首先将需要在内核线程中执行的函数等信息封装到kthread_create_info结构体中,然后加入kthreadd的kthread_create_list链表中接着去唤醒kthreadd去处理创建的内核线程请求,由它来执行具体的创建工作,之后通过一个completion对象等待创建结构创建成功后,线程就可以调度执行了。
struct task_struct *kthread_create_on_node(int (*threadfn)(void *data),
void *data, int node,
const char namefmt[],
...)
{
DECLARE_COMPLETION_ONSTACK(done);
struct task_struct *task;
struct kthread_create_info *create = kmalloc(sizeof(*create),
GFP_KERNEL);
if (!create)
return ERR_PTR(-ENOMEM);
create->threadfn = threadfn; //线程函数
create->data = data;
create->node = node;
create->done = &done;
spin_lock(&kthread_create_lock);
list_add_tail(&create->list, &kthread_create_list); //加入kthread_create_list,后面的kthread线程会处理这个
spin_unlock(&kthread_create_lock);
wake_up_process(kthreadd_task); //唤醒创建线程的线程
/*
* Wait for completion in killable state, for I might be chosen by
* the OOM killer while kthreadd is trying to allocate memory for
* new kernel thread.
*/
if (unlikely(wait_for_completion_killable(&done))) { //等待请求内核的线程创建完成
/*
* If I was SIGKILLed before kthreadd (or new kernel thread)
* calls complete(), leave the cleanup of this structure to
* that thread.
*/
if (xchg(&create->done, NULL))
return ERR_PTR(-EINTR);
/*
* kthreadd (or new kernel thread) will call complete()
* shortly.
*/
wait_for_completion(&done);
}
task = create->result; //获得创建的线程
if (!IS_ERR(task)) {
static const struct sched_param param = { .sched_priority = 0 };
va_list args;
va_start(args, namefmt);
vsnprintf(task->comm, sizeof(task->comm), namefmt, args); //设置线程的名字
va_end(args);
/*
* root may have changed our (kthreadd's) priority or CPU mask.
* The kernel thread should not inherit these properties.
*/
sched_setscheduler_nocheck(task, SCHED_NORMAL, ¶m);
set_cpus_allowed_ptr(task, cpu_all_mask);
}
kfree(create);
return task;
}内核专门提供了Kthreadd线程用来处理内核线程,kthreadd线程在内核启动的时候就创建好了,一直不会退出,当没有创建任务时,主动放弃CPU时间,调用schedule()执行调度程序;当任务到来后,它会被再次唤醒,执行具体的创建线程任务。
int kthreadd(void *unused)
{
struct task_struct *tsk = current;
/* Setup a clean context for our children to inherit. */
set_task_comm(tsk, "kthreadd");
ignore_signals(tsk);
set_cpus_allowed_ptr(tsk, cpu_all_mask);
set_mems_allowed(node_states[N_MEMORY]);
current->flags |= PF_NOFREEZE;
for (;;) {
set_current_state(TASK_INTERRUPTIBLE);//此线程不退出执行,没有创建任务时,主动放弃CPU执行调度程序
if (list_empty(&kthread_create_list))
schedule();
__set_current_state(TASK_RUNNING);
spin_lock(&kthread_create_lock);
while (!list_empty(&kthread_create_list)) { //当kthread_create_list存在任务时
struct kthread_create_info *create;
create = list_entry(kthread_create_list.next,
struct kthread_create_info, list);//获取链表中的创建信息
list_del_init(&create->list);
spin_unlock(&kthread_create_lock);
create_kthread(create);//创建线程
spin_lock(&kthread_create_lock);
}
spin_unlock(&kthread_create_lock);
}
return 0;
}create_thread()函数实际上调用kernel_thread(),而它又最终调用_do_fork()创建线程。创建的时候并不会把线程函数直接传递进去,而是先传入一个公共的代理函数,待代理函数起来,并进行一些初始化后,才开始执行线程函数。
static void create_kthread(struct kthread_create_info *create)
{
int pid;
#ifdef CONFIG_NUMA
current->pref_node_fork = create->node;
#endif
/* We want our own signal handler (we take no signals by default). */
pid = kernel_thread(kthread, create, CLONE_FS | CLONE_FILES | SIGCHLD); //通过do_fork()创建内核线程
if (pid < 0) {
/* If user was SIGKILLed, I release the structure. */
struct completion *done = xchg(&create->done, NULL);
if (!done) {
kfree(create);
return;
}
create->result = ERR_PTR(pid);
complete(done);
}
}static int kthread(void *_create)
{
/* Copy data: it's on kthread's stack */
struct kthread_create_info *create = _create; //获得传递过来的信息
int (*threadfn)(void *data) = create->threadfn; //线程处理函数
void *data = create->data;
struct completion *done;
struct kthread self;
int ret;
self.flags = 0;
self.data = data;
init_completion(&self.exited);
init_completion(&self.parked);
current->vfork_done = &self.exited;
/* If user was SIGKILLed, I release the structure. */
done = xchg(&create->done, NULL); //获取done完成量
if (!done) {
kfree(create);
do_exit(-EINTR);
}
/* OK, tell user we're spawned, wait for stop or wakeup */
__set_current_state(TASK_UNINTERRUPTIBLE); //设置内核线程状态
create->result = current; //返回当前任务的tsk
complete(done); //通知创建者线程创建完毕,并释放CPU让创建者可以得到运行
schedule();
ret = -EINTR;
if (!test_bit(KTHREAD_SHOULD_STOP, &self.flags)) {
__kthread_parkme(&self);
ret = threadfn(data); //执行实际的线程函数
}
/* we can't just return, we must preserve "self" on stack */
do_exit(ret); //当前任务退出
}















 2029
2029











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











