






一、设计降压转换电路
降压转换电路工作原理、降压转换电路设计、降压转换电路设计步骤。
#1、降压转换器工作原理
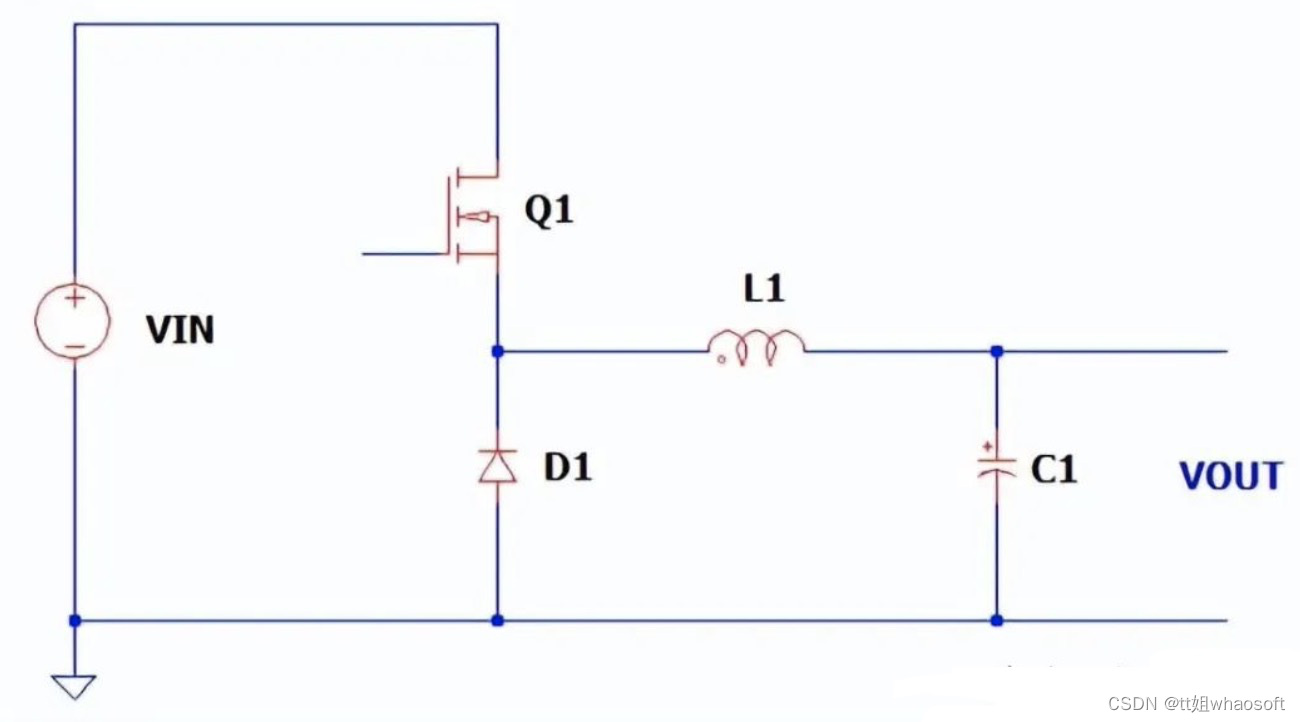
降压转换器是一种电压输出低于电压输入的开关转换器,也被称为降压开关转换器。
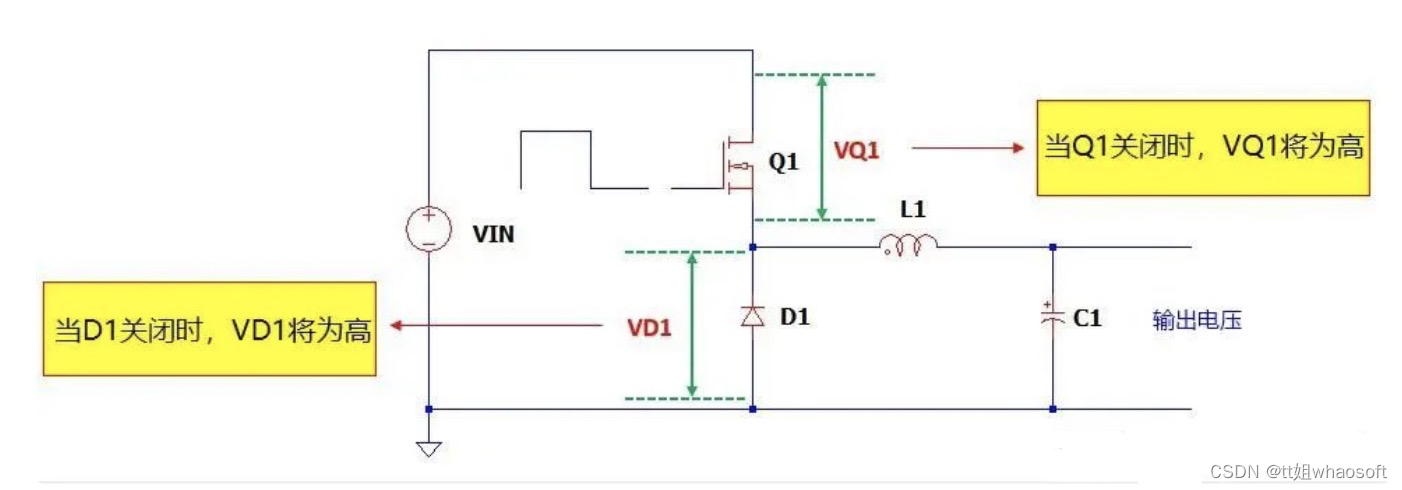
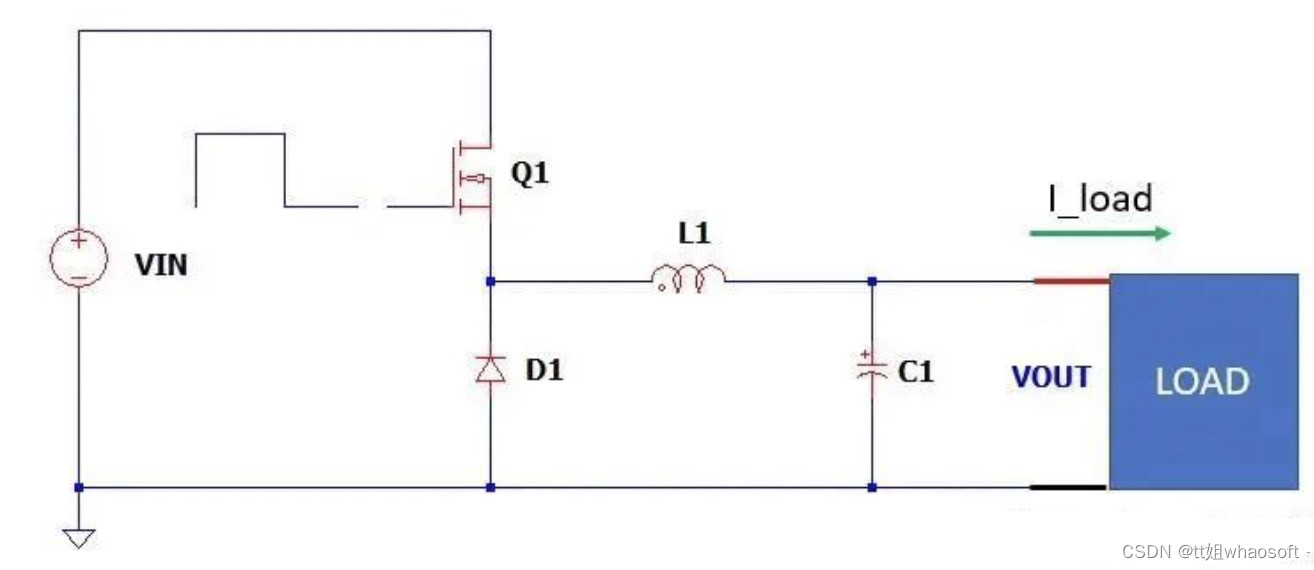
降压转换器只有 4 个部分,主要是开关(Q1)、二极管(D1)、电感(L1)和电容滤波器(C1)。
输入电压Vin必须高于输出电压 Vout 才能成为降压转换器。
降压转换电路
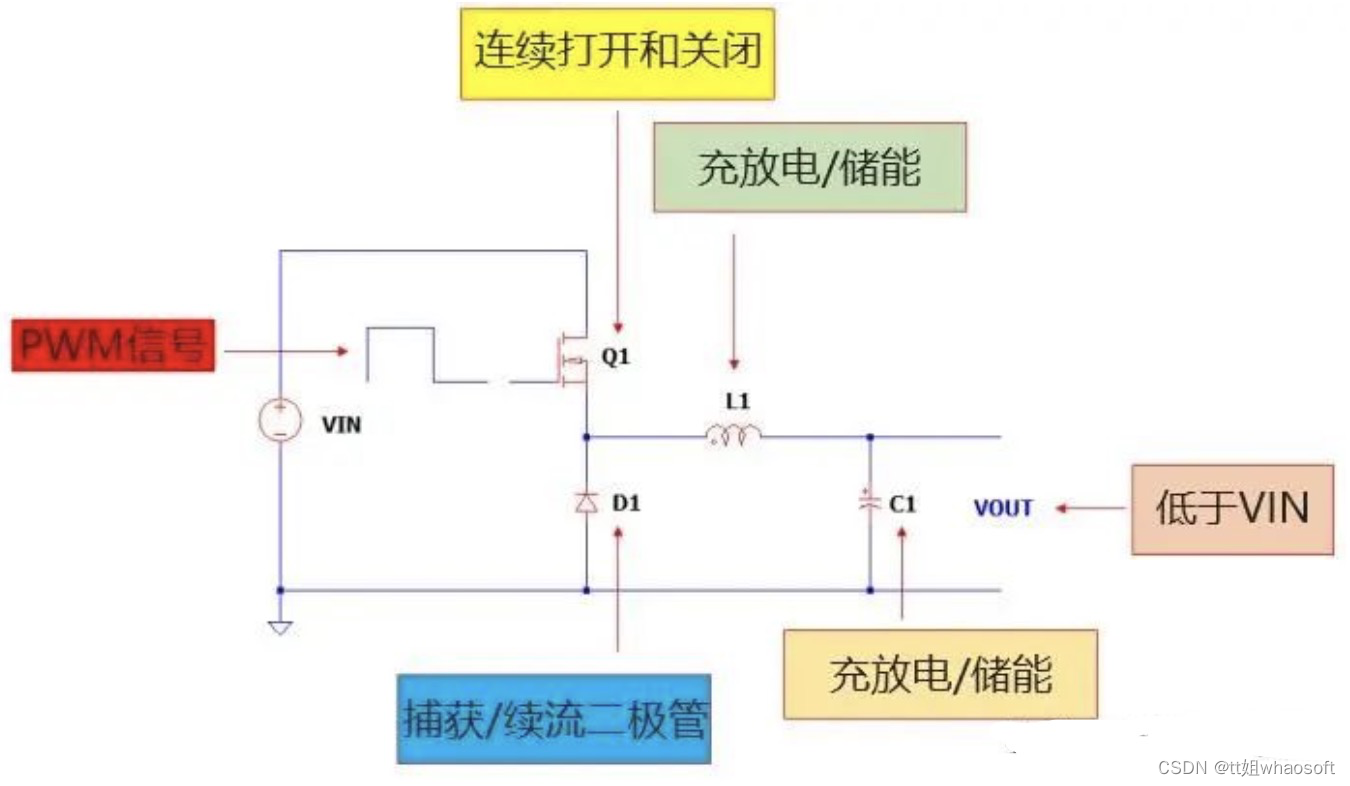
降压转换器用作电压调节器,同时利用 BJT、MOSFET 或 IGBT 等半导体部件的开关动作。Q1 会不断开关,D1 充当续流二极管,L1 将充电和放电,而 C1 将存储能量。
降压稳压器是一种低损耗稳压器,如果设计得当,效率可达 90% 以上。
降压转换电路工作原理
#2、降压转换器设计
降压转换器通过连续打开和关闭 BJT、MOSFET 或 IGBT 等半导体开关来工作。开关的开启和关闭由占空比决定。降压转换器的理想占空比很简单:
占空比 = VOUT / VIN
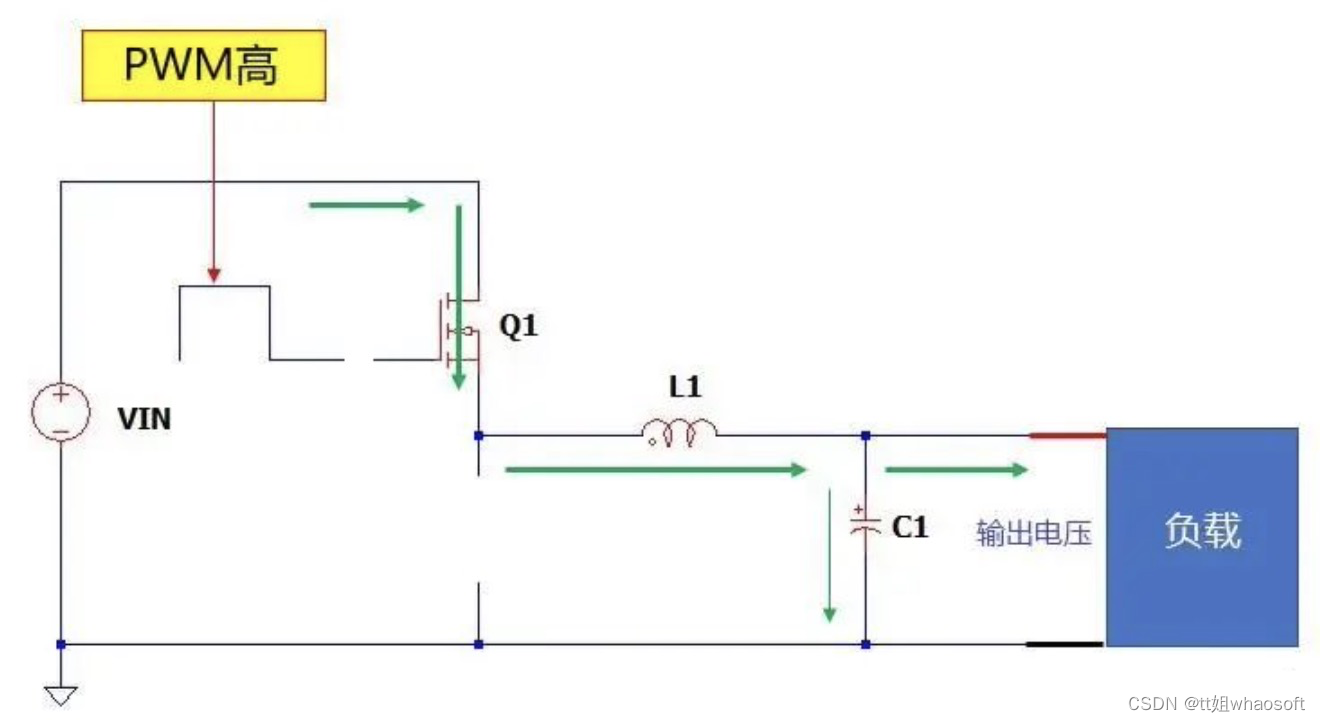
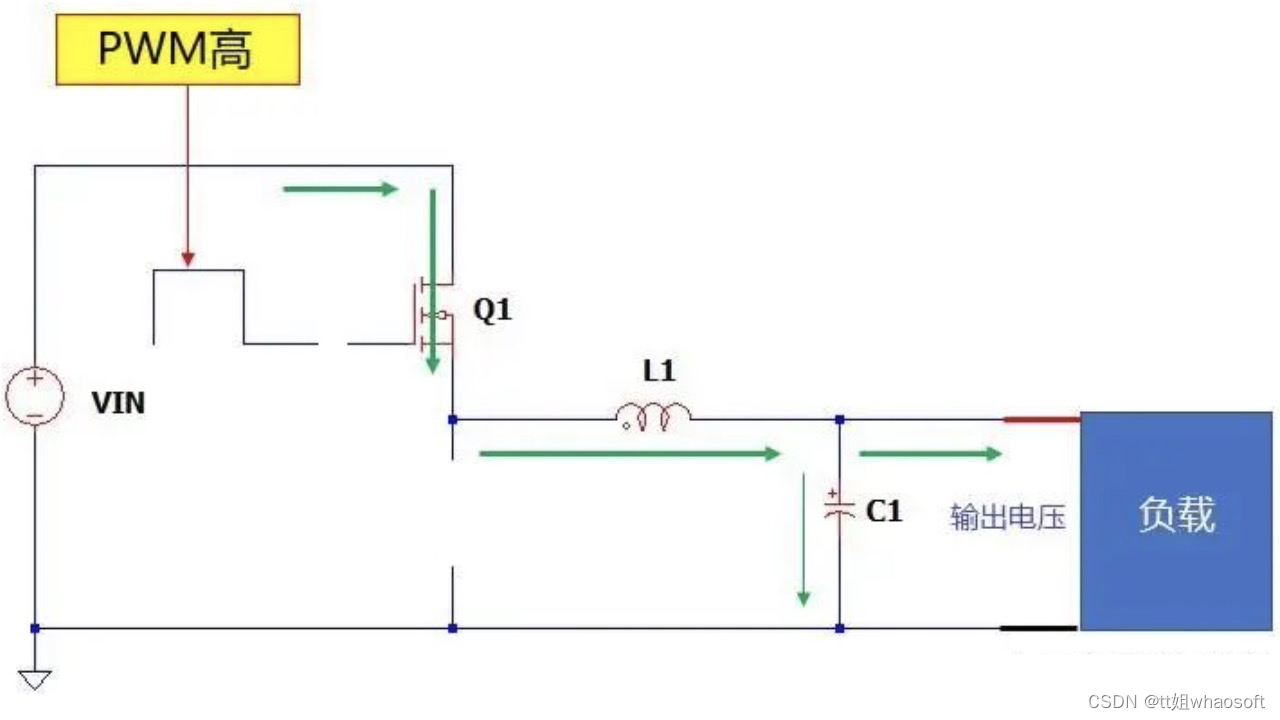
1、降压转换器基本功能– PWM 为高电平
当 PWM 处于高电平状态时,Q1 将在饱和状态下导通(电压降非常低)。D1 将被反向偏置并且不参与电流环路。电流将从 VIN 流向 Q1 的通道,然后为 L1 充电,一部分为 C1 充电,最后主电流路径将流向负载。
降压转换器
此时,L1 将充电,点侧将处于较高的电位,L1 的电流将线性上升。
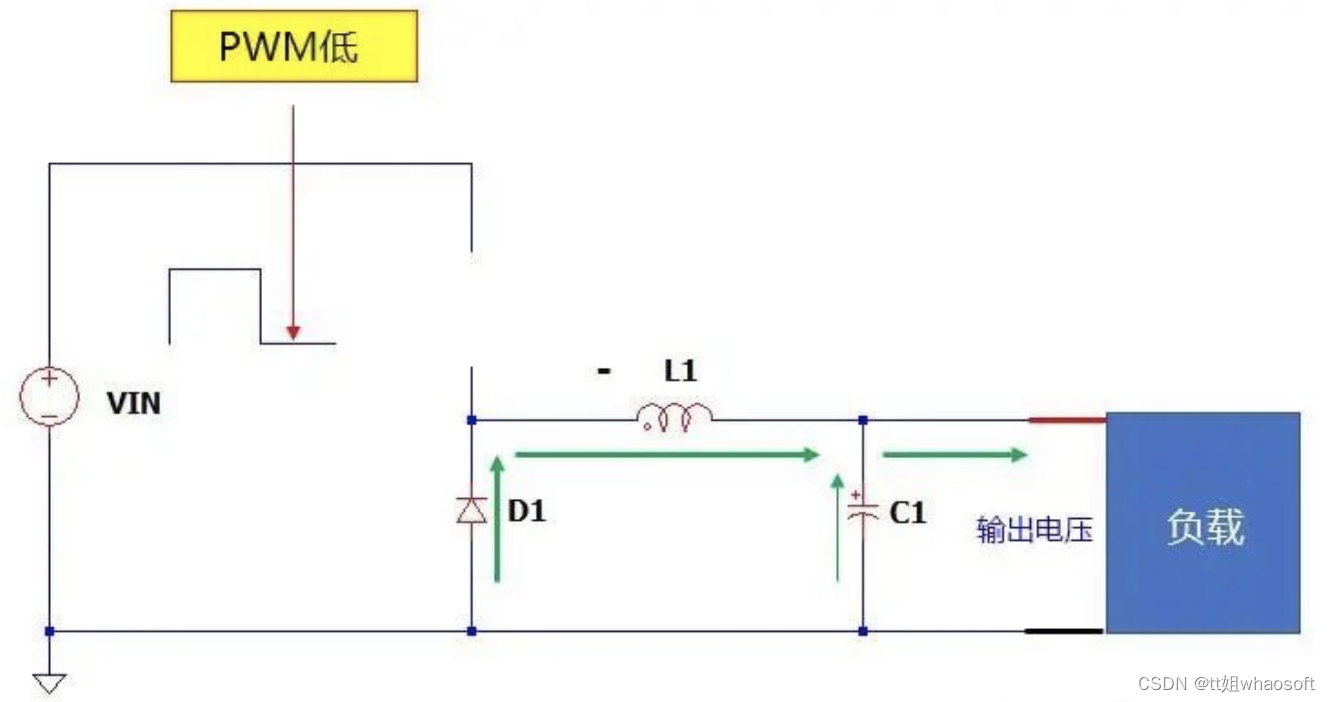
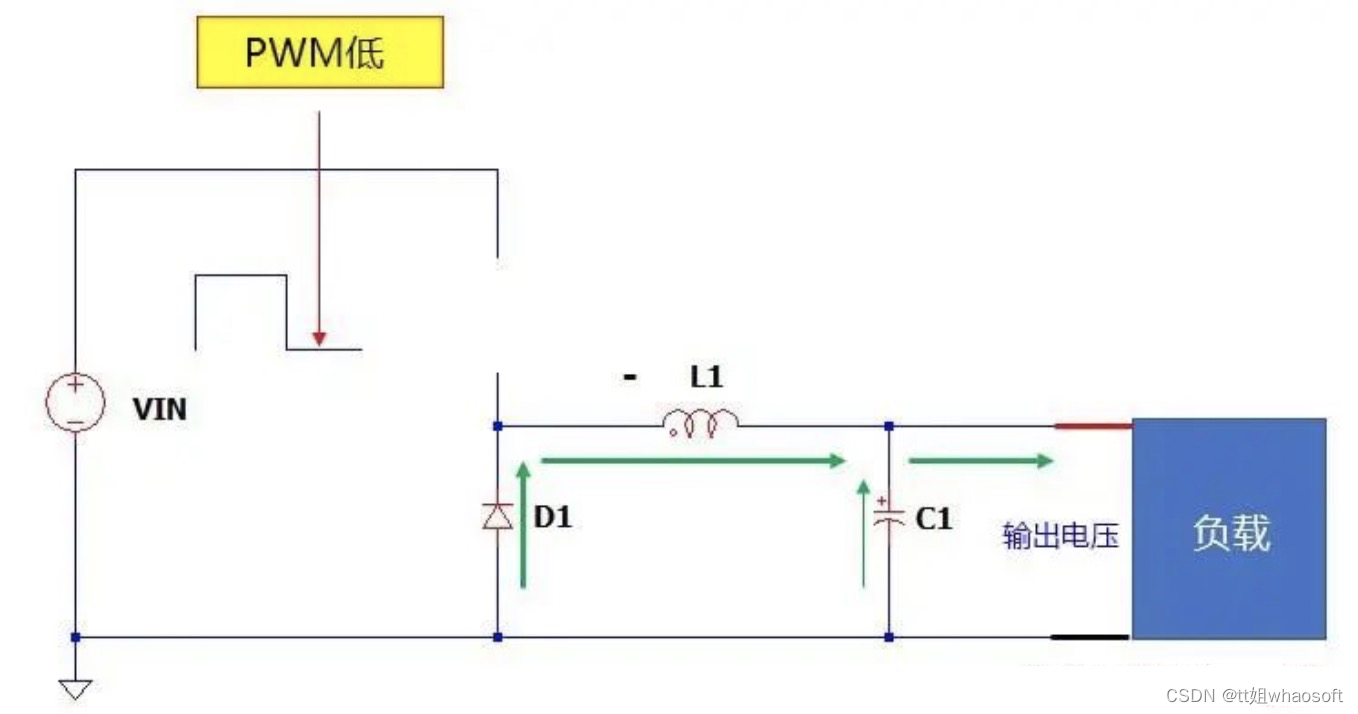
2、降压转换器基本操作– PWM 为低电平
当 PWM 为低电平时,Q1 将关闭,不再是电流环路的一部分。电感 L1 的点侧将变为负电位,因为 L1 将反转极性但保持相同的电流方向。电流路径将从 D1 到此时正在放电的 L1,然后到负载。此时,C1 能量也将有助于提供负载的需要。
降压转换器
#3、降压转换电路设计教程-各元器件取值
- 1、电感纹波电流
- 2、占空比
- 3、电感 RMS 电流
- 4、电感直流电流推导
- 5、开关 RMS 电流导数
- 6、开关直流电流导数
- 7、二极管 RMS 电流推导
- 8、二极管直流电流推导
- 9、开关和二极管电压推导
- 10、开关功率损耗推导
- 11、开关散热注意事项
- 12、二极管功率损耗推导
- 13、二极管散热注意事项
- 14、电感功率损耗推导
- 15、电容纹波电流推导
- 16、效率方程推导
- 17、电路实例
1、电感纹波电流
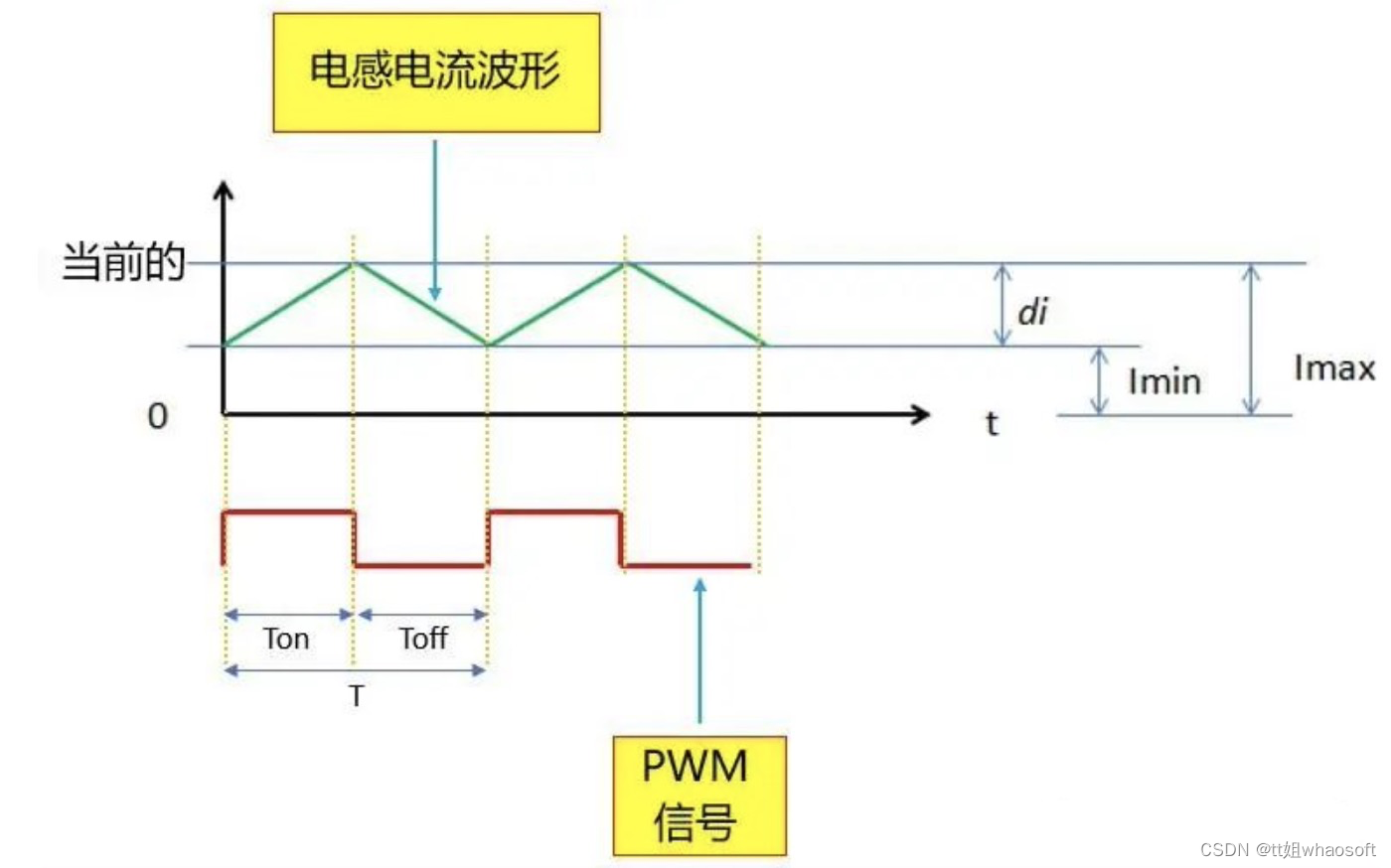
要导出电感电流方程,了解其波形很重要。顺便说一下,降压转换器可分为 CCM、TM 或 DCM。
CCM 代表连续导通模式,而 TM 代表过渡模式或有时称为边界模式。另一方面,DCM 代表不连续导通模式。
CCM 和 TM 具有相同的分析,而 DCM 需要不同的分析。对于高功率应用,不太可能有意在 DCM 模式下运行降压转换器。这将导致非常高的损失并且不切实际。
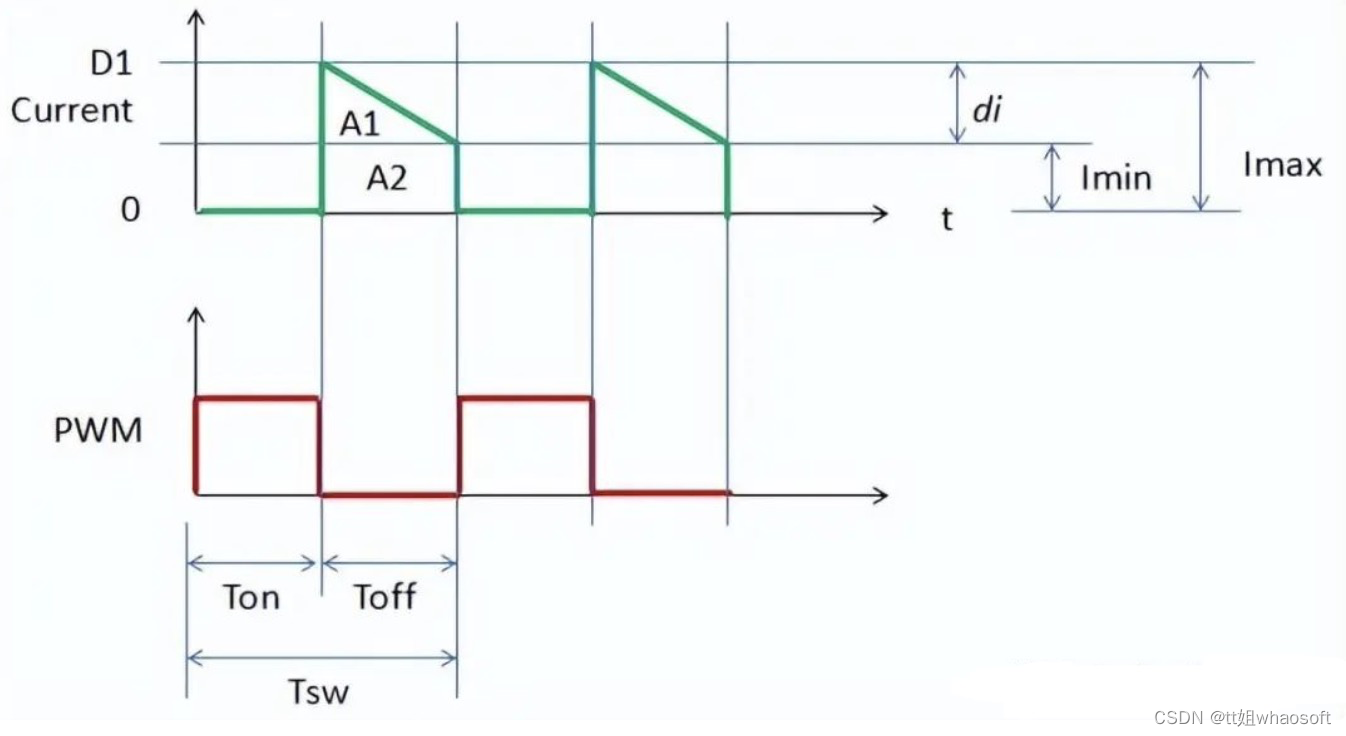
但是,降压转换器有时会进入 DCM 模式,此时负载很轻。因此,设计点或组件选择将基于重载,这主要是在 CCM。因此,在这个推导中,我们将考虑 CCM 操作。下面的绿色是电感在 CCM 下工作的电流波形。当 PWM 信号为高电平时,它线性上升。然后,当 PWM 信号为低电平时,它会线性减小。
降压转换器有时会进入 DCM 模式
当 PWM 为高电平时,分析将是:
降压转换电路
要使用的关键方程是电感两端的电压,即:
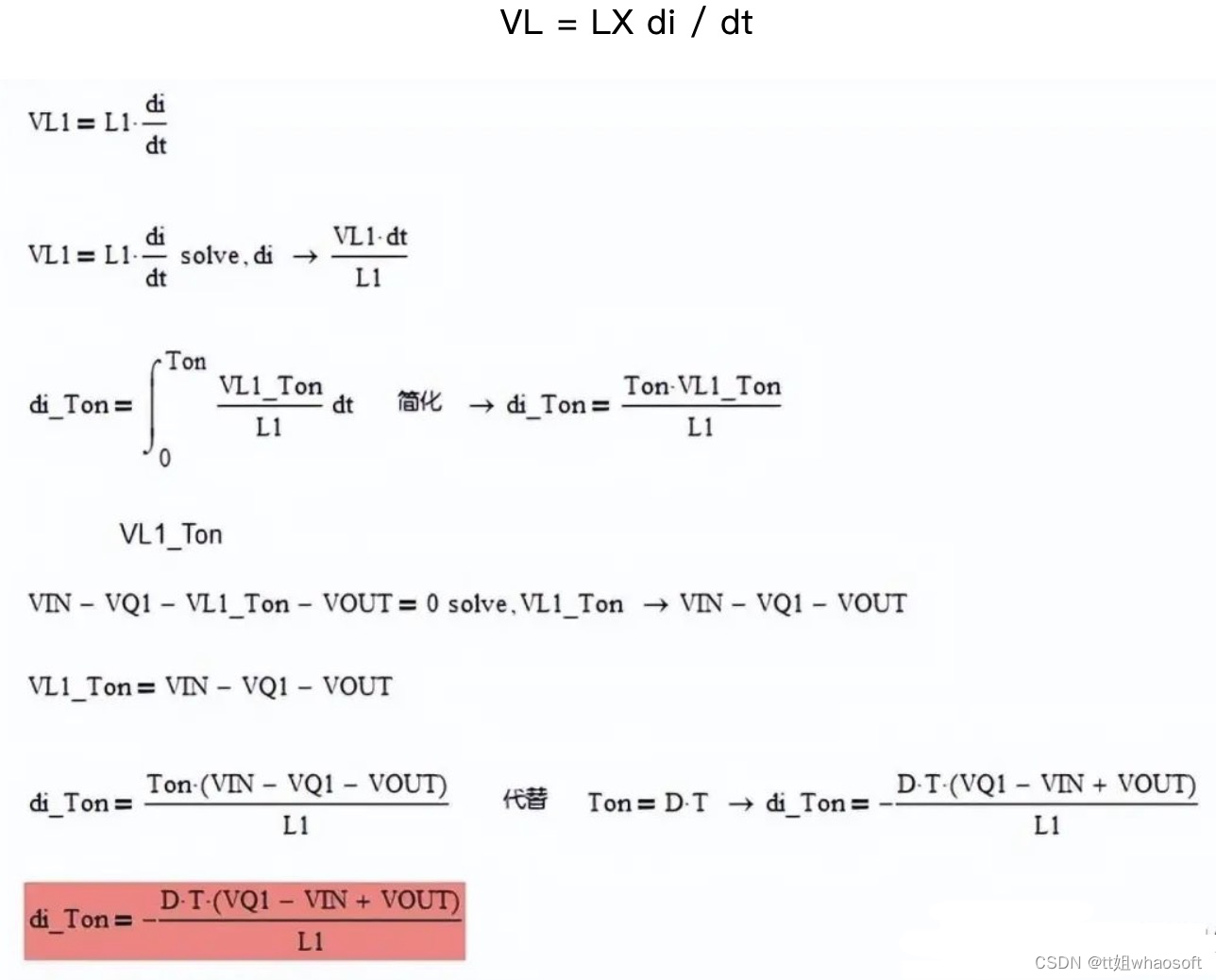
电感纹波电流计算公式
当PWM为低电平时,分析为:
降压转换电路
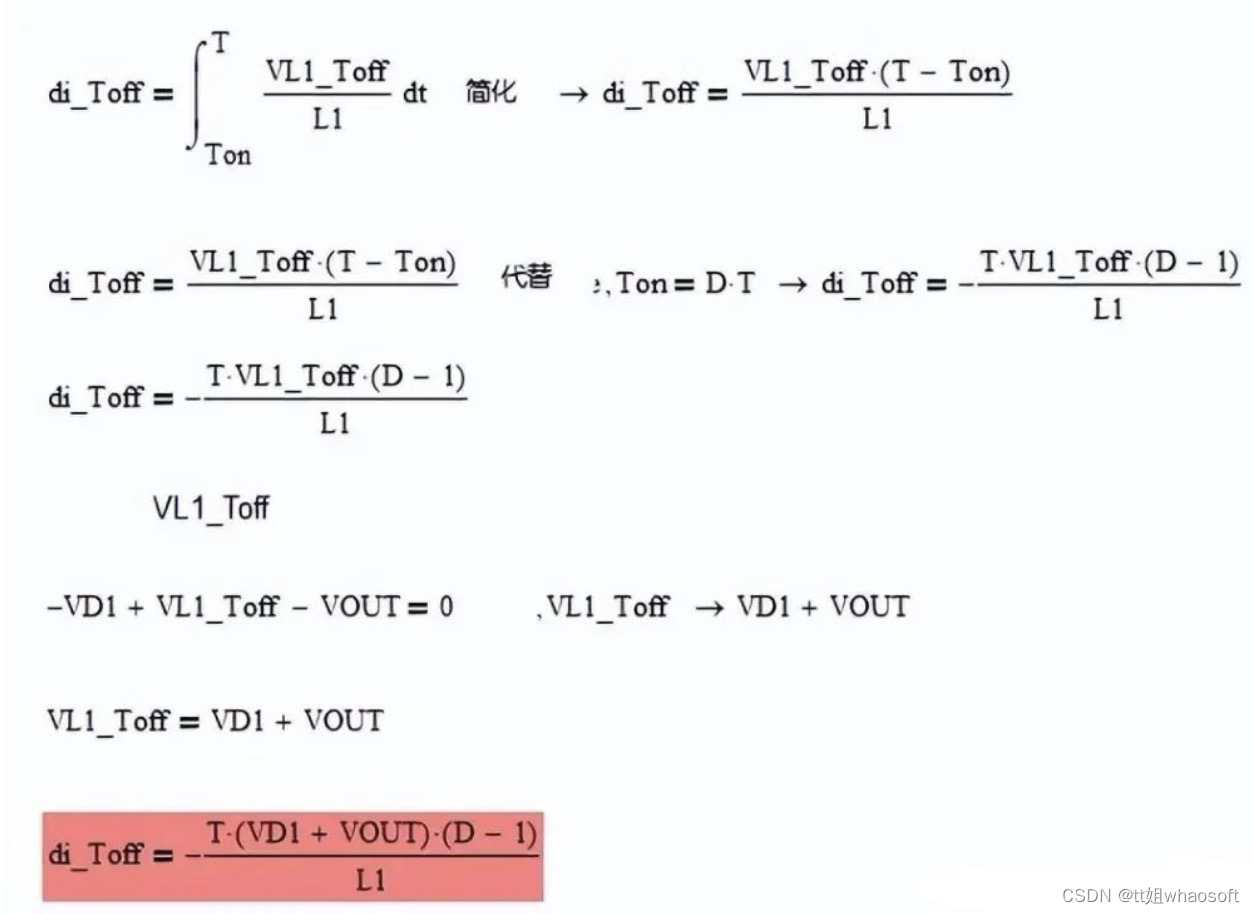
di_Ton 和 di_Toff 都会给出相同的结果。
2、占空比推导
如果你检查电感电流波形,则上升和下降幅度相同。因此,上面的两个方程 di_Ton 和 di_Toff 都可以相等,我们得出了最终的占空比。
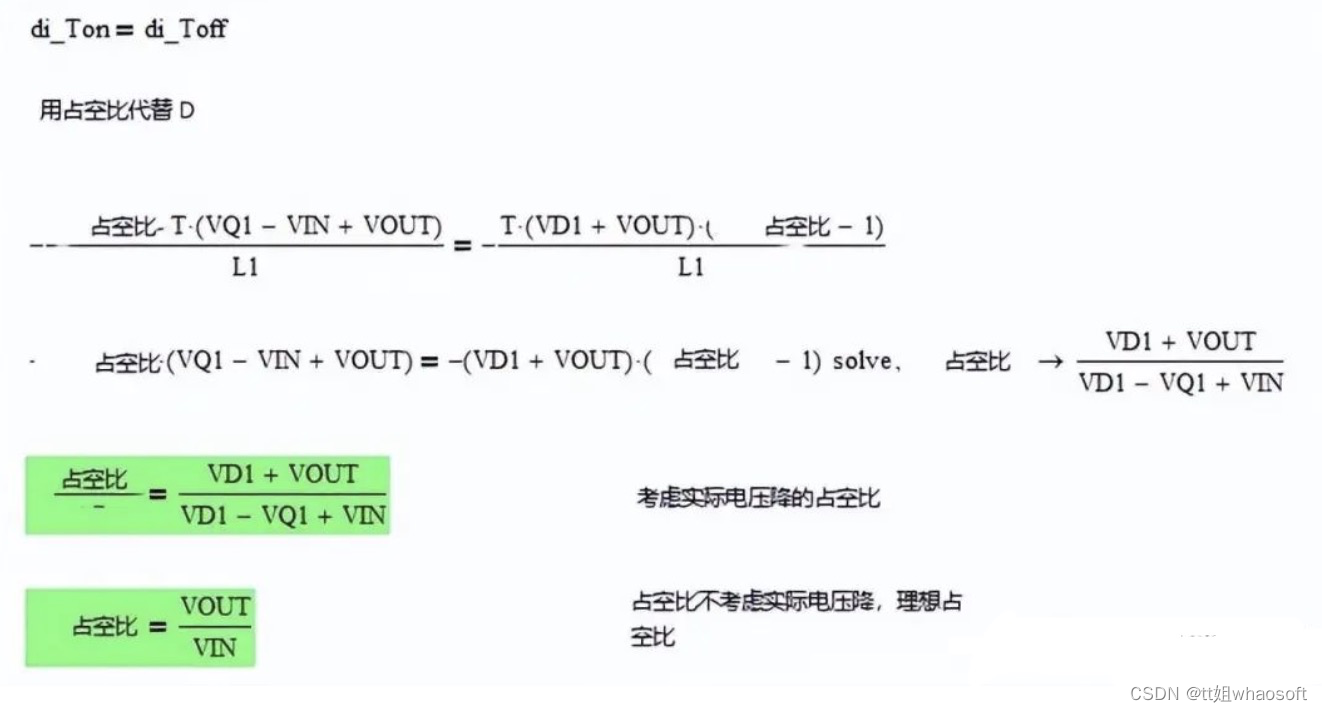
占空比公式
3、电感 RMS电流推导
我们将从以下波形中的电感 RMS 电流开始,即 di 和 Imin 的 RMS 之和。
降压转换电路
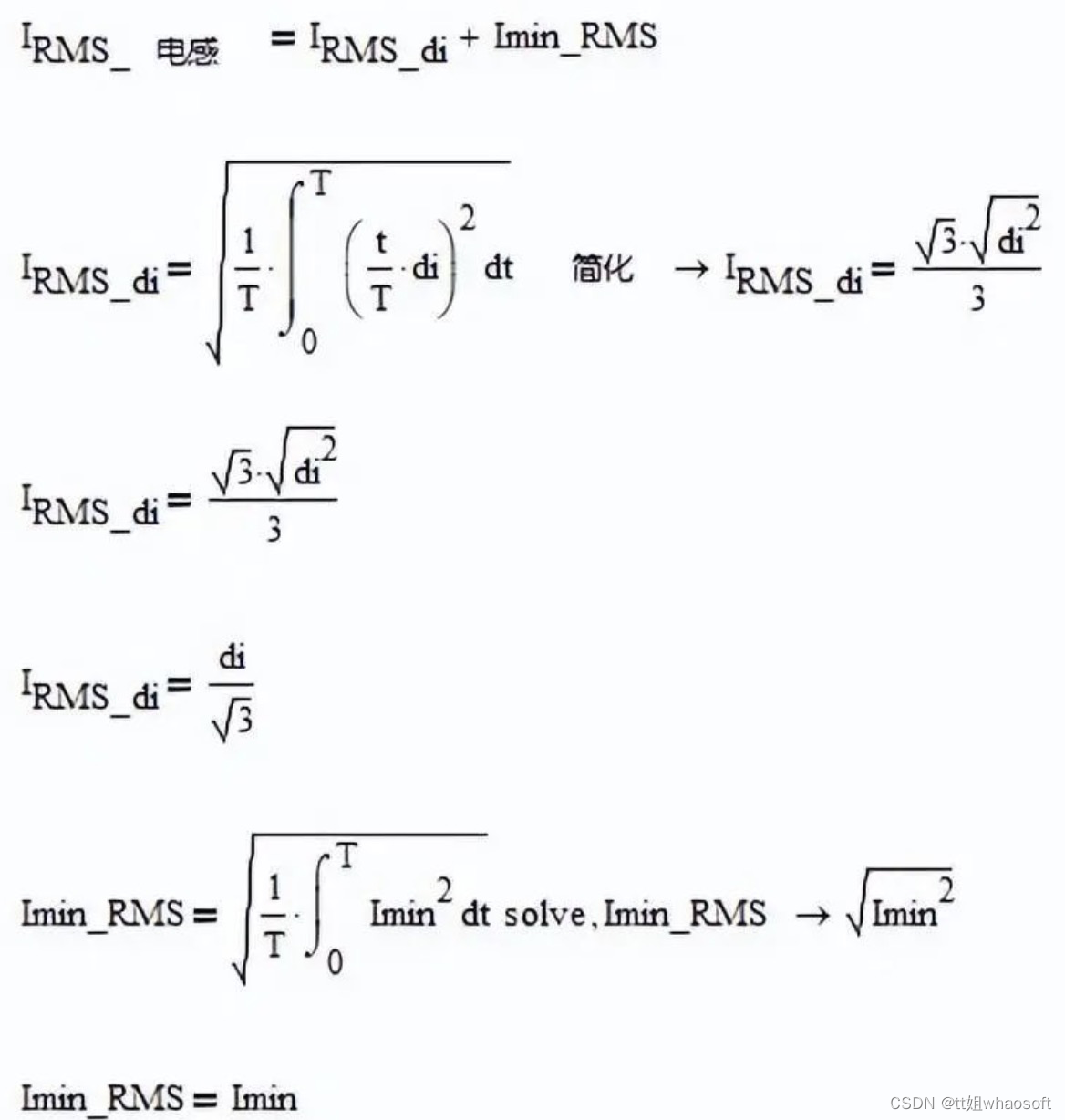
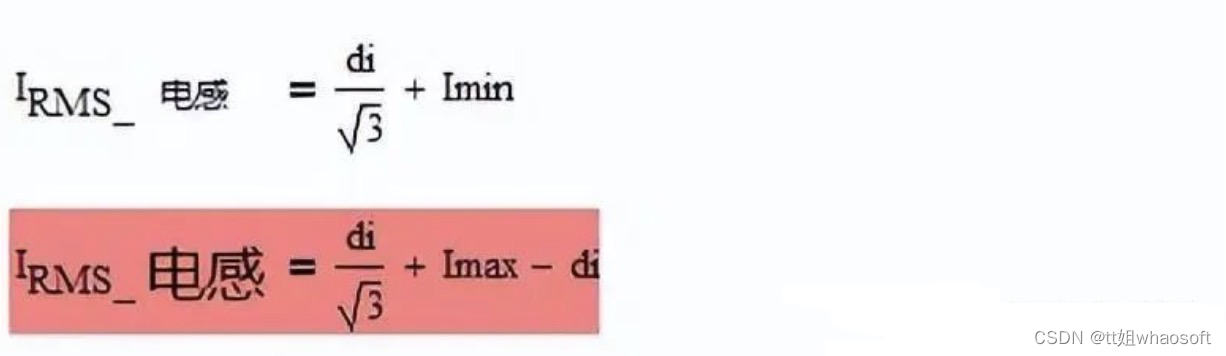
电感 RMS电流推导公式
4、电感直流电流推导
下一个降压转换器电感设计公式将针对直流电流。但是,如果你仔细观察降压转换器原理图,就会发现电感器与输出负载串联。因此,电感电流的直流电平与负载的直流电平相同。
5、开关 RMS 电流推导
降压转换器上的开关可以是 BJT、MOSFET 或 IGBT。这里使用 MOSFET,因为它是中低功率应用中最流行的一种。MOSFET 的电流波形如下所示。
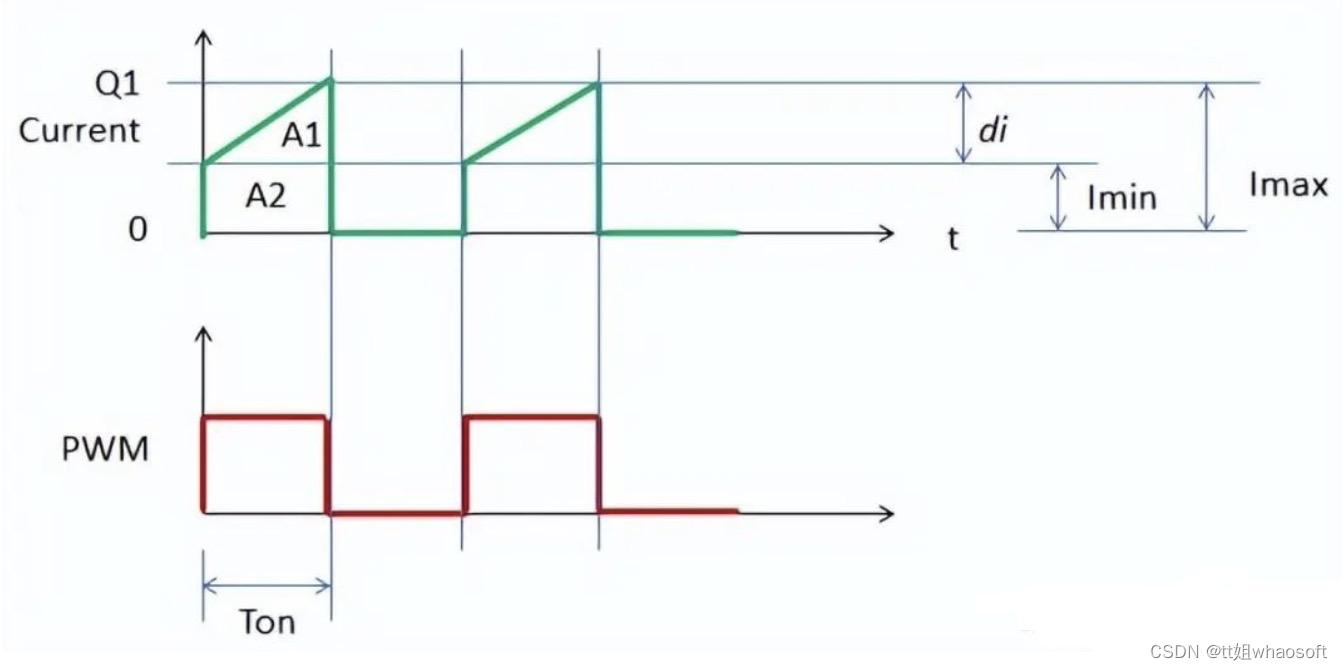
MOSFET 的电流波形
Q1 的 RMS 电流是面积 A1 和 A2 的 RMS 之和。A1是三角形,A2是矩形。
1)A1 区域的 RMS
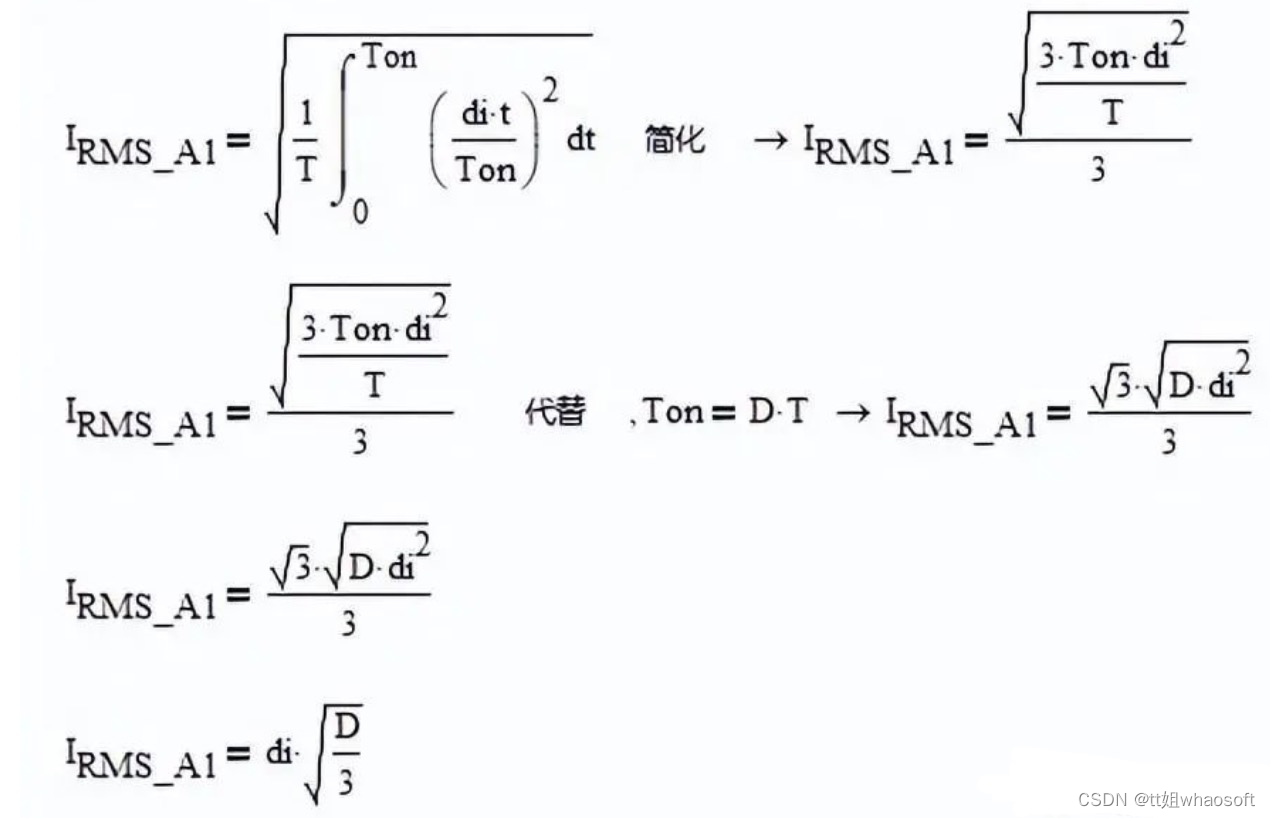
A1 区域的 RMS公式
2)A2 区域的 RMS
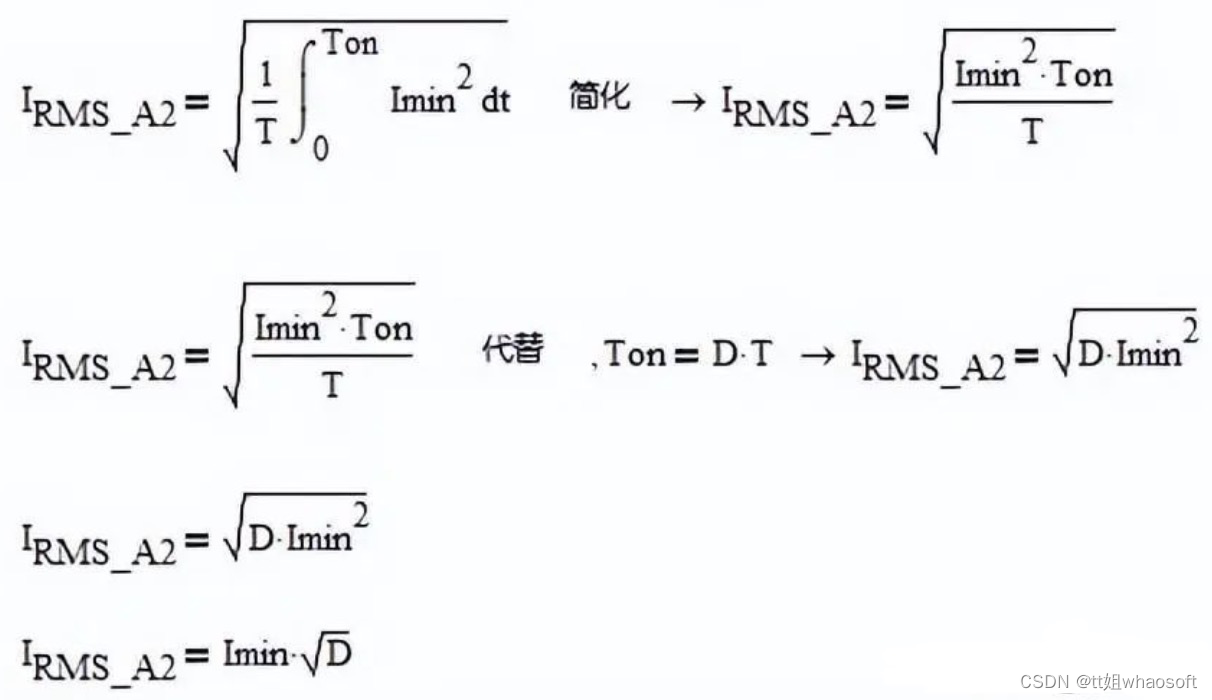
A2 区域的 RMS公式
因此,开关电流的 RMS 为
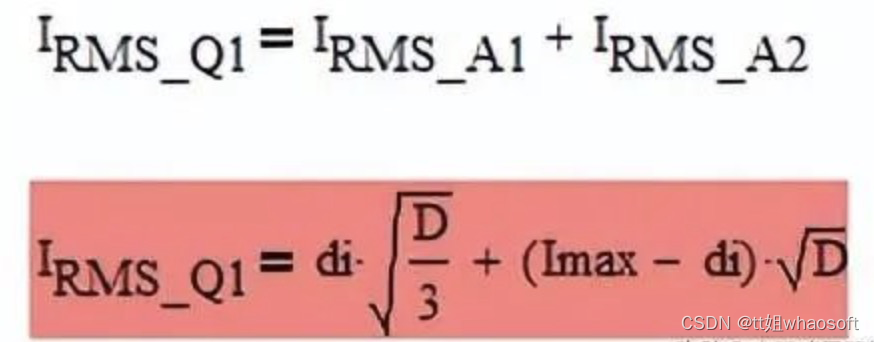
开关电流的 RMS
简化后消除 Imax:
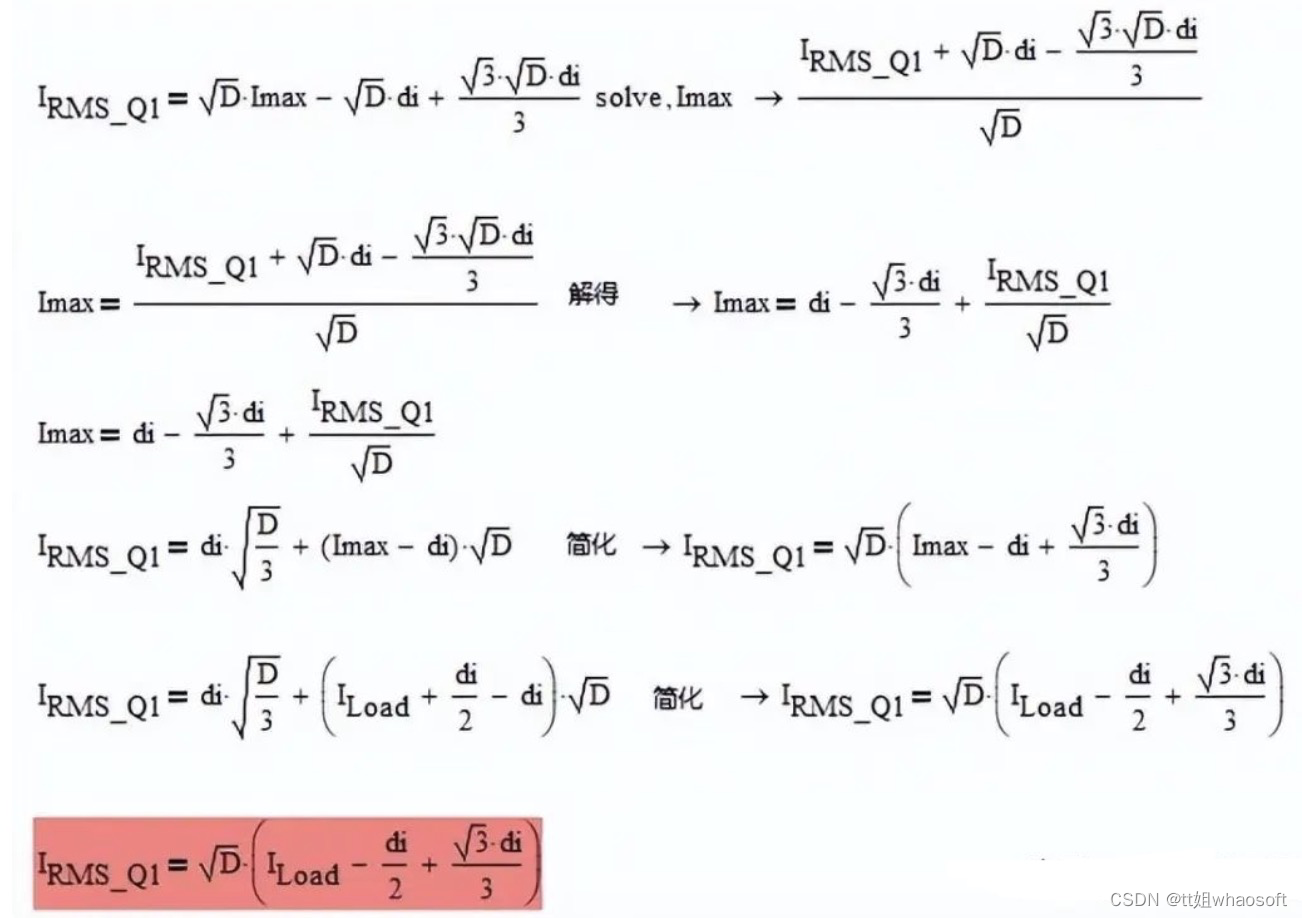
开关电流的 RMS 公式
6、 开关直流电流推导
MOSFET 的 RMS 电流始终高于 DC 电流,它是用于计算功耗以获得最坏情况的值。然而,无论出于何种原因,设计师都可能需要 DC 电平。因此,让我们将其包含在此降压转换器设计教程中。
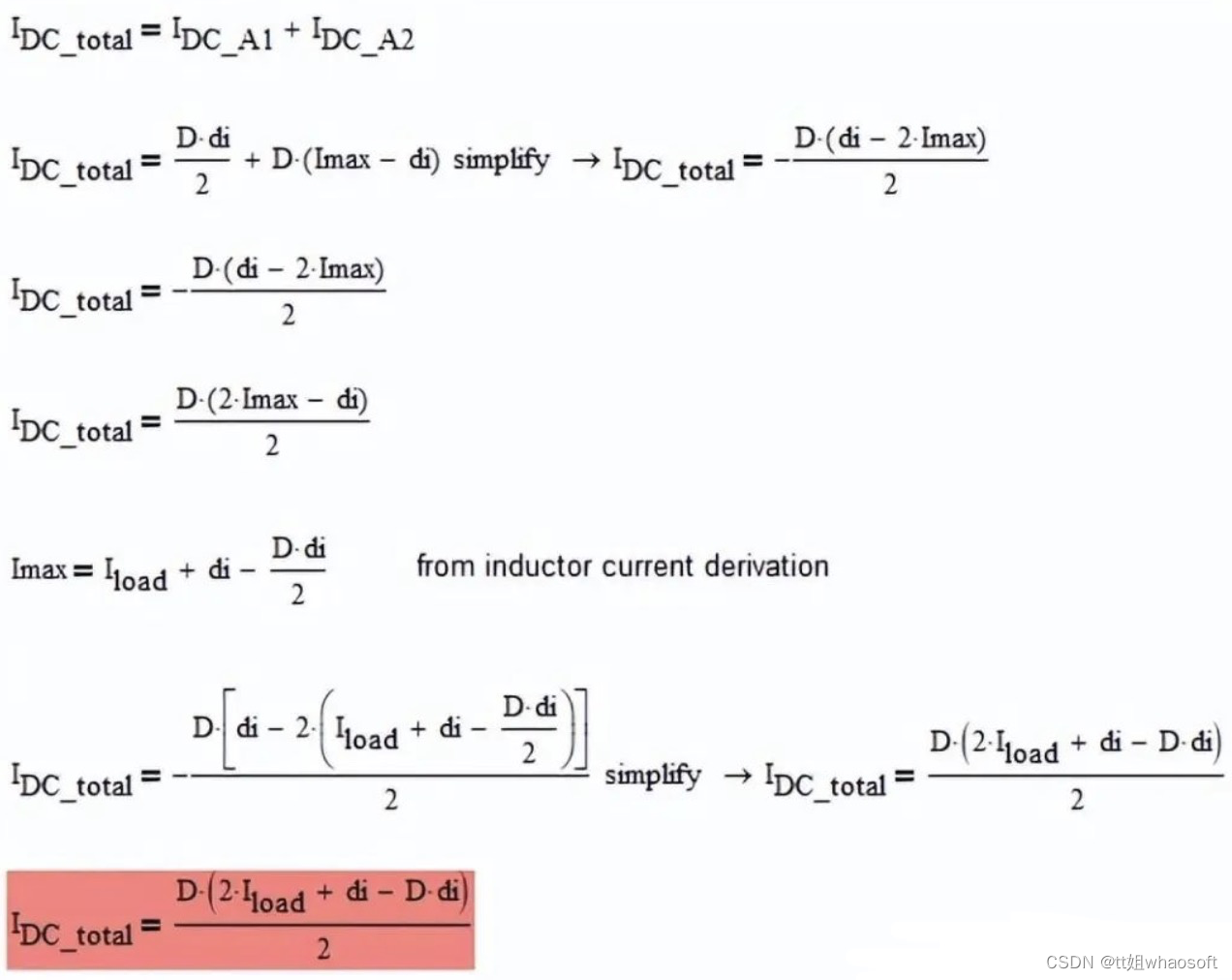
总直流电平也是上述波形中 A1 和 A2 的直流电平之和。
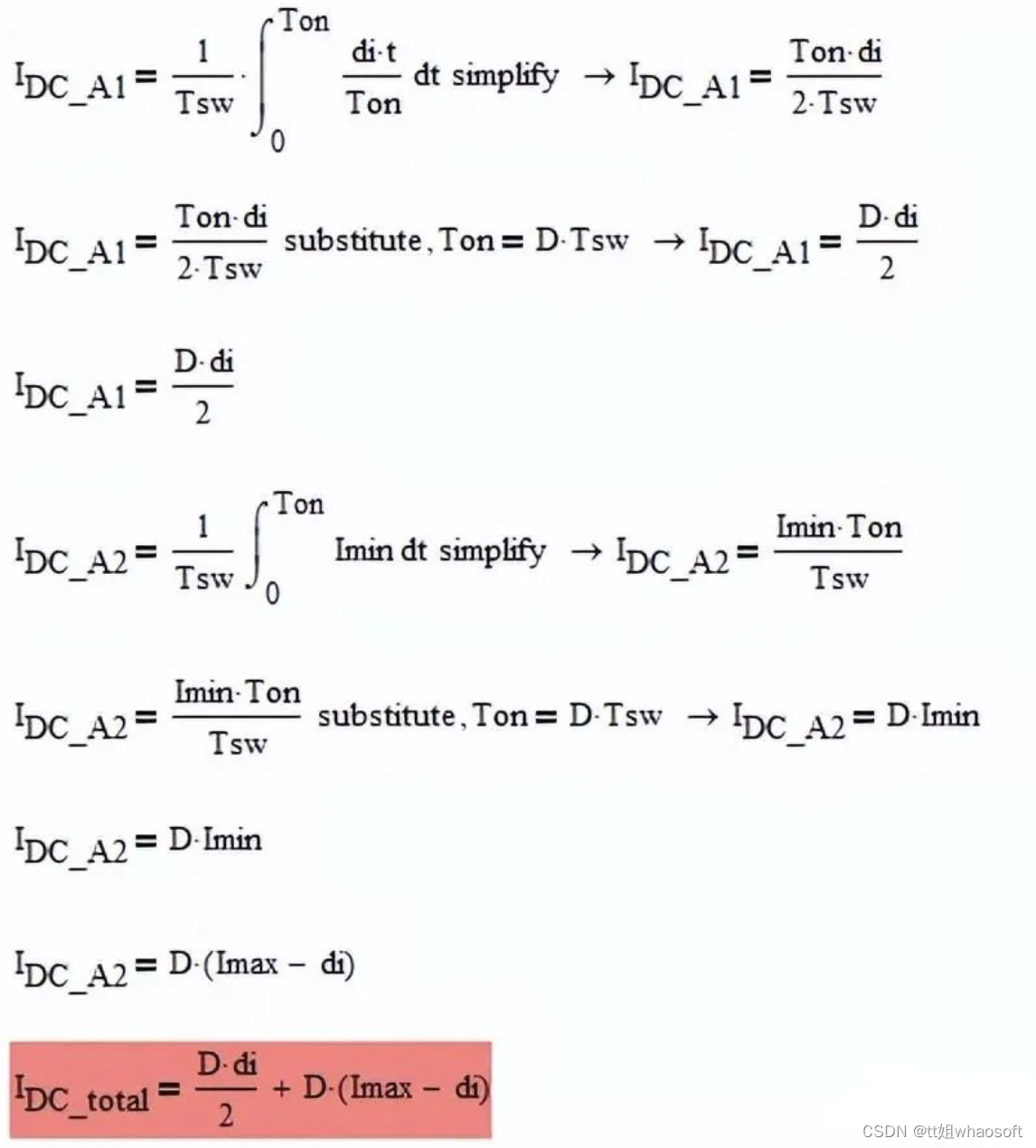
重写方程以排除 Imax
7、降压转换器设计教程——二极管 RMS 电流推导
参考下面的波形,我们可以计算出二极管的 RMS 电流。只有当 MOSFET 不导通时,二极管才会导通。
MOSFET波形图
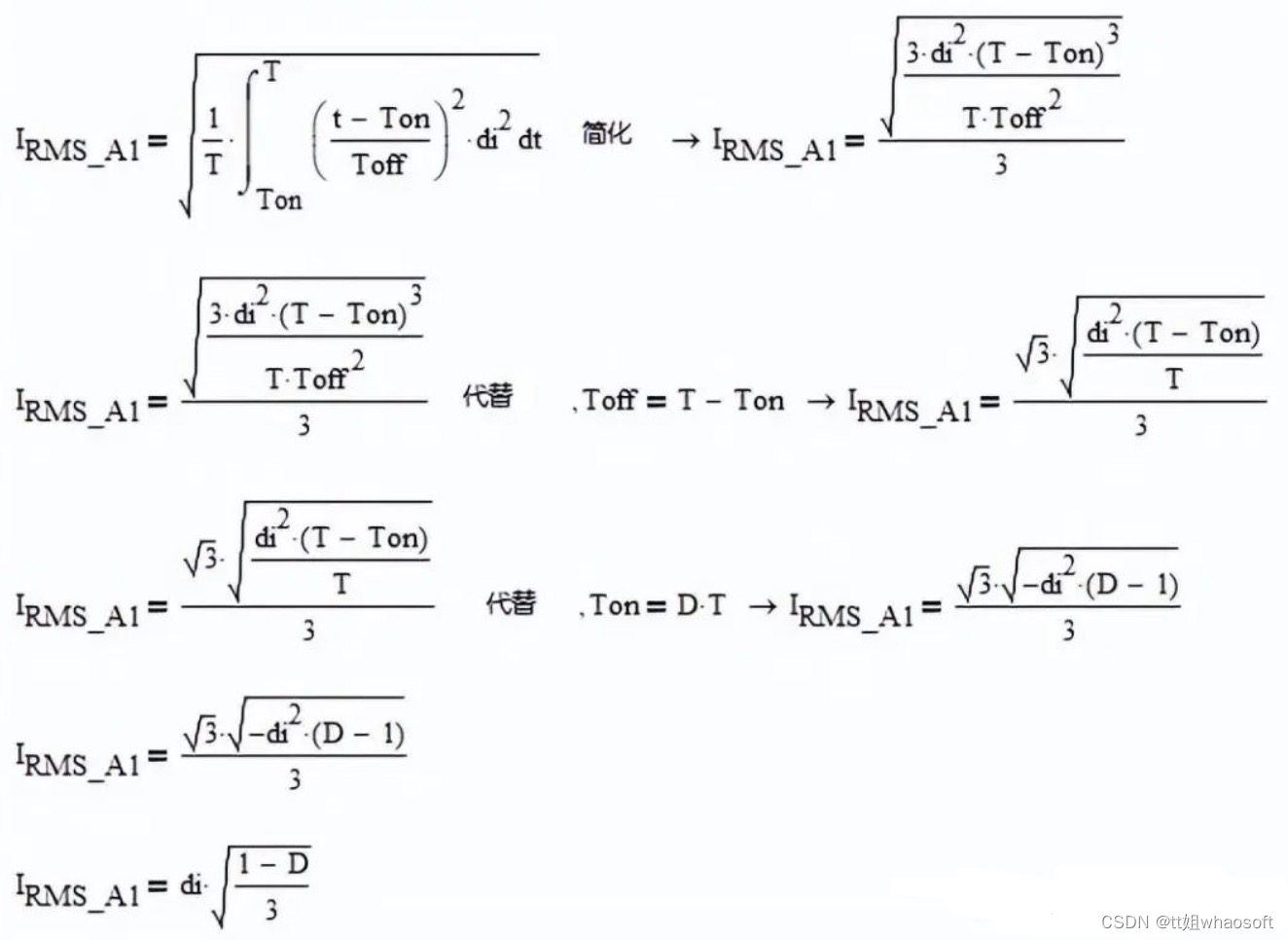
二极管 RMS 电流公式
二极管 RMS 电流公式
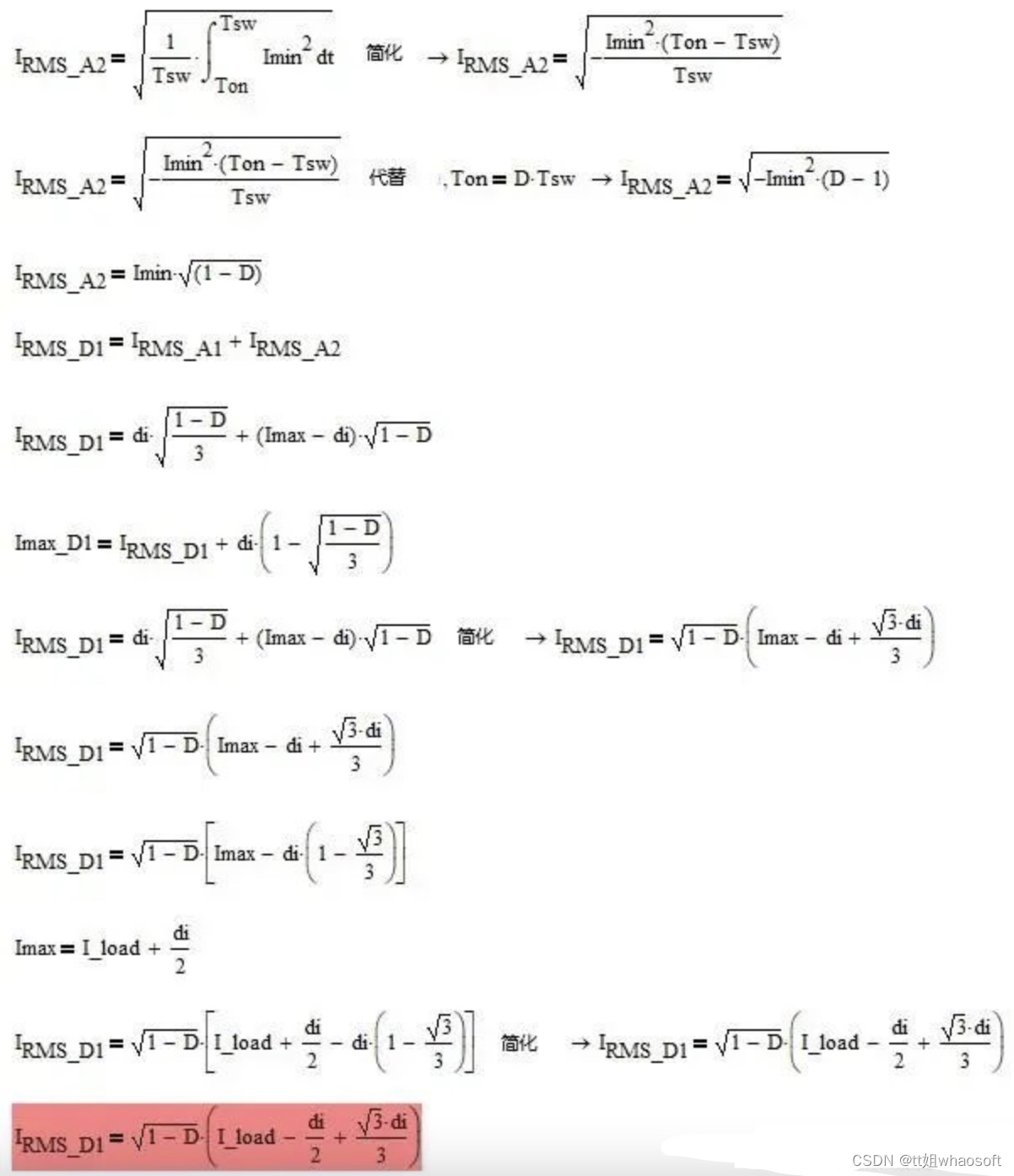
8、二极管直流电流推导
继续使用上述波形来确定二极管的直流电流:
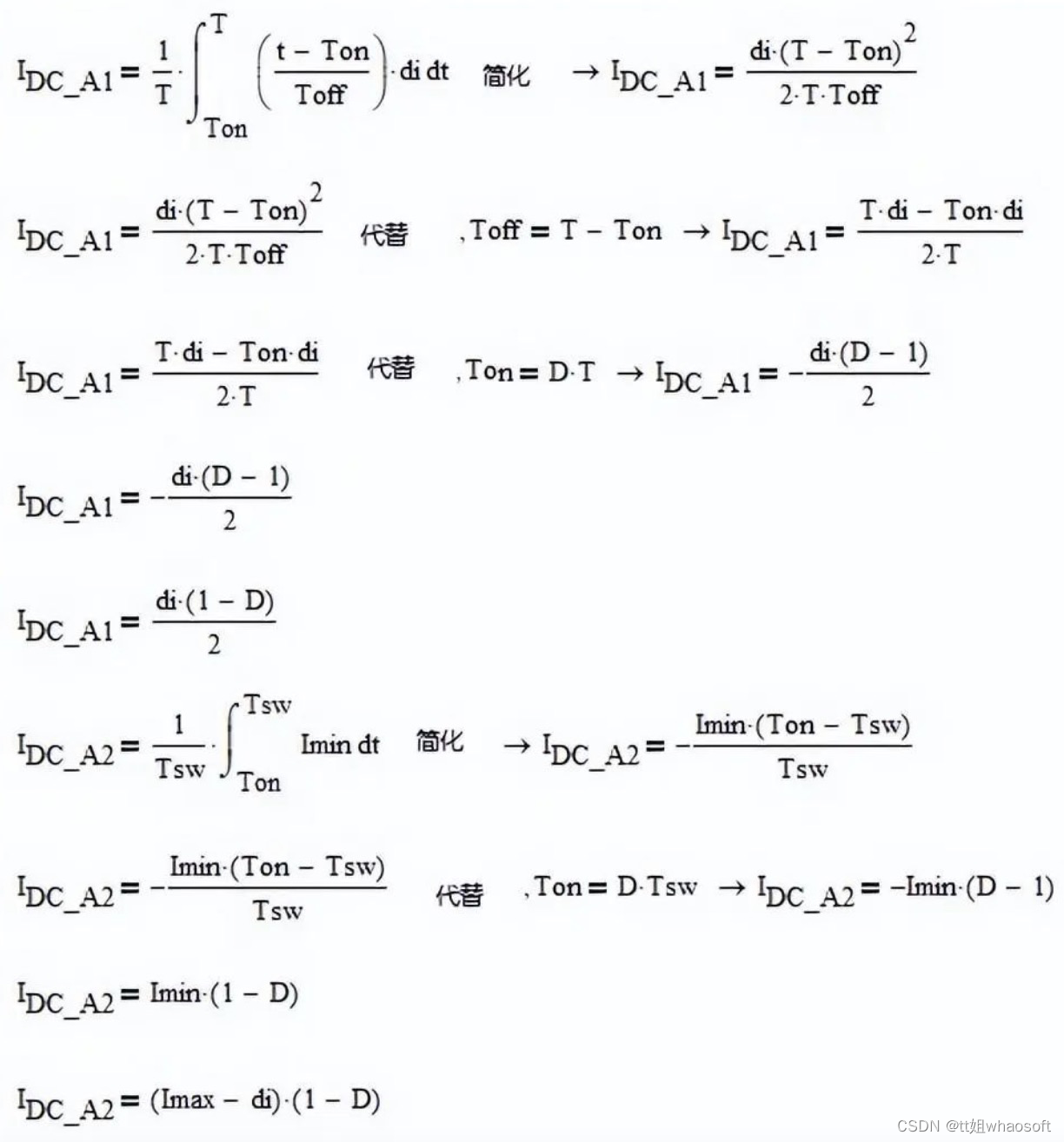
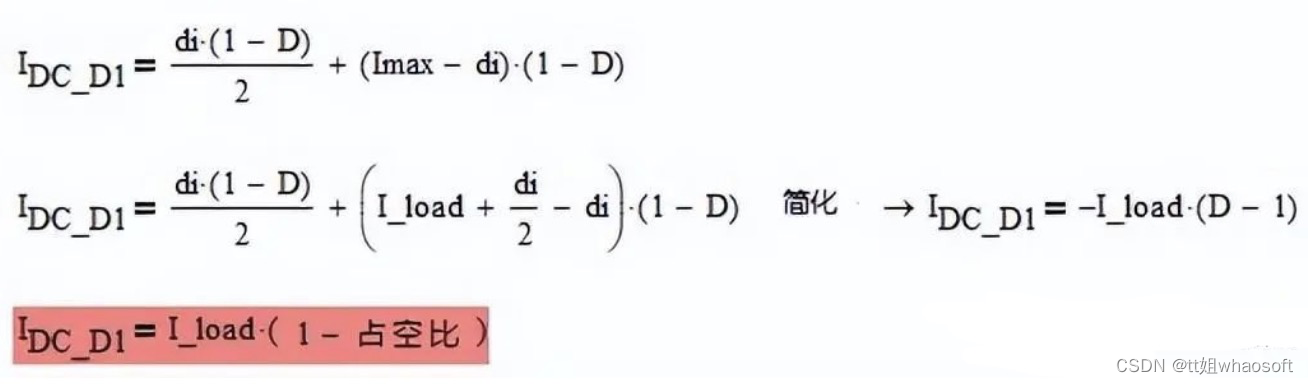
二极管直流电流公式
9、开关和二极管电压推导
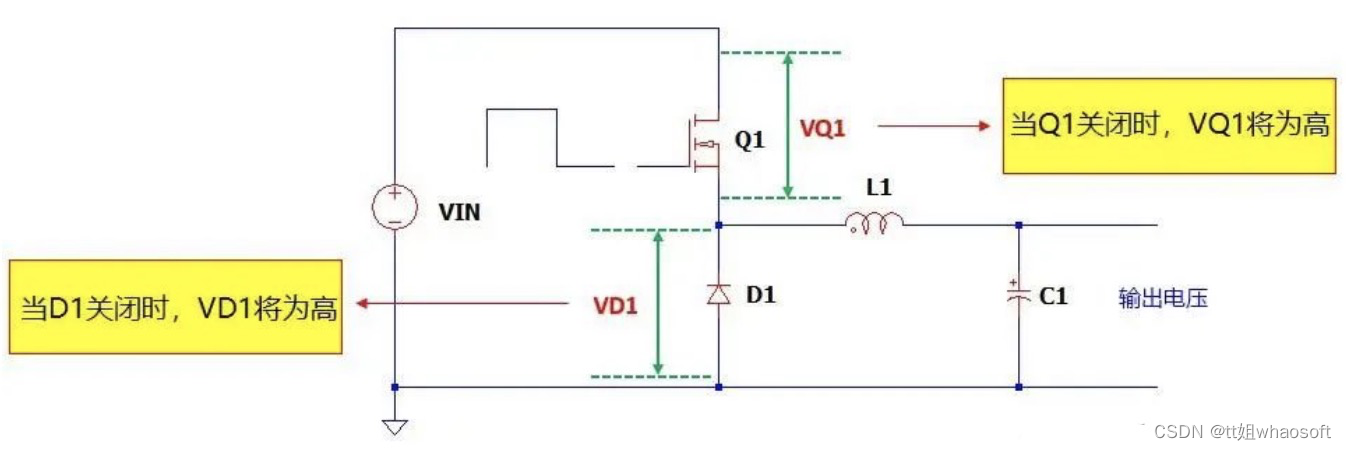
降压转换电路
VQ1 最大值 = VIN 最大值 + VSpike
Vspike 是由寄生电感引起的,可以假设为 VIN 的 40-70%。
VD1 最大值 = VIN 最大值 + Vspike
Vspike 是由寄生电感引起的,可以假定为 VIN 的 50-120%。
10、降压转换器设计教程——开关功率损耗推导
开关功率损耗由两个因素组成。一是导通损耗,二是开关损耗。传导损耗是由于开关上的固定电压降引起的,而开关损耗是由于开关的开关动作引起的。
这里使用 MOSFET,因此,贝洛方程适用于 MOSFET。
1)传导损耗
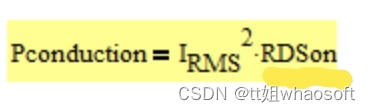
传导损耗公式
2)开关损耗
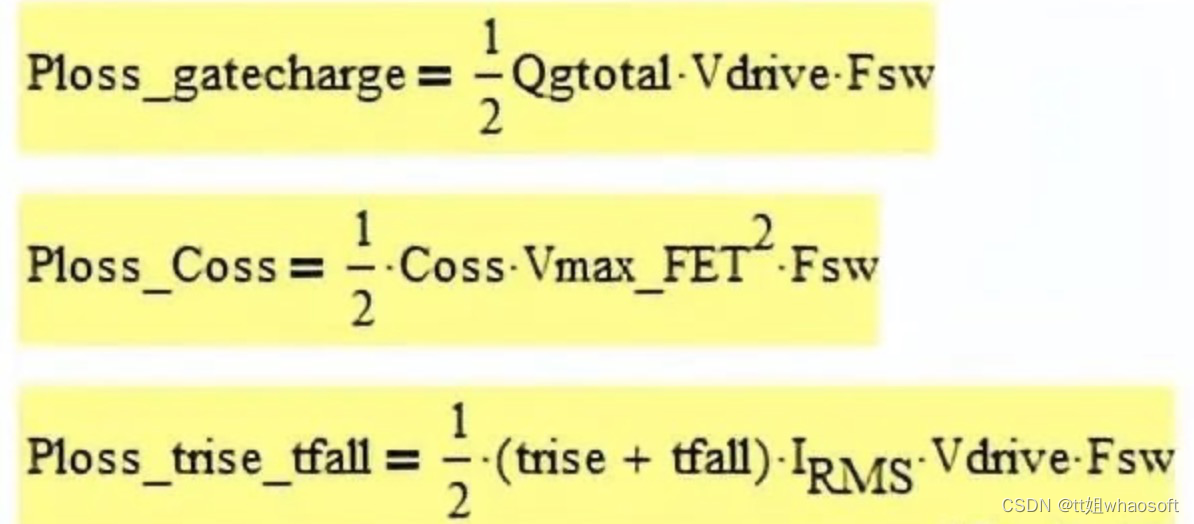
开关损耗公式
3)总 MOSFET 功率损耗

总 MOSFET 功率损耗公式
11、 开关电源应力和散热注意事项
开关的功率应力只是实际功耗除以功率容量。
Pstress = Pdissipation 实际 / Pdissipation 能力
对于没有散热器(开关未安装在散热器上):
耗散能力 = (Tjmax – Tamax) / Rthjc
- Tjmax – 器件的最高结温
- Tamax – 最高工作环境温度
- Rthjc – 结到外壳的热阻
如果需要计算器件的实际结温,可以按如下方式进行:
Tjactual = (Pdissipation capacity X Rthjc) + Tamax
对于带散热器(开关安装在散热器上):
耗散能力 = (Tjmax – Tcmax) / (Rthjc + Rthchs +Rthhsa)
- Tjmax – 器件的最高结温
- Tcmax – 最大允许外壳温度
- Rthjc – 结到外壳的热阻
- Rthchs – 从外壳到散热器的热阻,这是连接散热器和外壳的材料的热阻。
- Rthhsa – 从散热器到空气的热阻,这实际上是所用散热器的热阻。
实际器件结温可计算为:
Tjactual = [Pdissipation 能力 X (Rthjc + Rthchs +Rthhsa)] + Tcmax
12、二极管功率损耗推导
损耗二极管 = Irms X VF
13、 二极管功率应力和散热注意事项
二极管的功率应力只是实际功耗除以功率容量。
Pstress = Pdissipation 实际 / Pdissipation 能力
对于没有散热器(二极管未安装在散热器上):
耗散能力 = (Tjmax – Tamax) / Rthjc
- Tjmax – 器件的最高结温
- Tamax – 最高工作环境温度
- Rthjc – 结到外壳的热阻
如果需要计算器件的实际结温,可以按如下方式进行:
Tjactual = (Pdissipation capacity X Rthjc) + Tamax
对于带散热器(二极管安装在散热器上):
耗散能力 = (Tjmax – Tcmax) / (Rthjc + Rthchs +Rthhsa)
- Tjmax – 器件的最高结温
- Tcmax – 最大允许外壳温度
- Rthjc – 结到外壳的热阻
- Rthchs – 从外壳到散热器的热阻。这是连接散热器和外壳的材料的热阻。
- Rthhsa – 从散热器到空气的热阻。这实际上是所用散热器的热阻。
实际器件结温可计算为:
Tjactual = [Pdissipation 能力 X (Rthjc + Rthchs +Rthhsa)] + Tcmax
14、电感功率损耗推导
电感的功率损耗由两部分组成:直流损耗和交流损耗。在低开关频率和低功率下,AC 损耗很小,因此根本不包括在计算中。但是对于非常高的开关频率,你可以假设开关损耗与直流损耗几乎相同。直流损耗有时也称为铜损,而开关损耗也称为磁芯损耗。
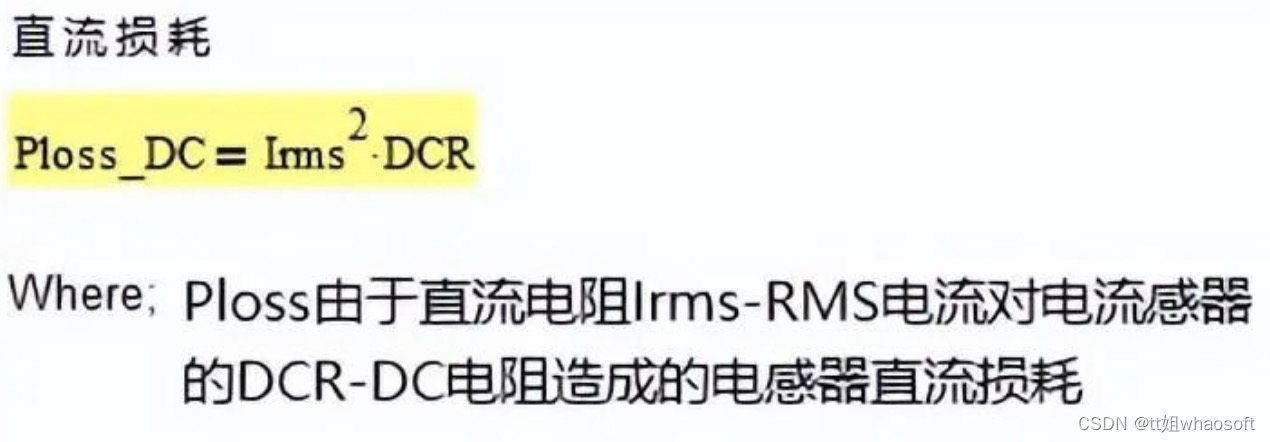
电感功率损耗公式
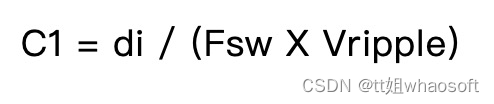
15、 输出电容选择
下面的输出电容 (C1) 计算是通用的。但是,特定控制器可能有自己的公式来推导出输出电容的值,因为这与环路补偿有关。考虑到没有 ESR 的影响,可以使用下面的公式来确定输出电容的大小。
电解电容的ESR很大,分析时需要考虑。上面计算的电容应具有不高于下式的 ESR。

- ESR——等效串联电阻
- di – 电感纹波电流
- Fsw——开关频率
- Vripple – 允许的输出纹波电压
纹波电流
所选输出电容的纹波电流额定值应高于以下公式的结果。

输出电容的纹波电流额定值
- Irms_inductor – 电感 RMS 电流
- I_load – 负载电流
16、 降压转换器效率方程推导
降压转换器效率可以使用以下等式计算。
效率 = (Pout / Pin) X 100%
Pout = Iout X Vout
Pin = Pout + Ploss 总计
效率 = [Iout X Vout / (Pout + Ploss 总)] X 100%
- Iout – 负载电流
- Vout – 输出电压
- Pout – 总功率损耗
17、电路实例
电路实例
二、自动驾驶传感器之激光雷达、毫米波雷达、超声波雷达及摄像头
传感器的种类及特征

#毫米波雷达的原理和功能
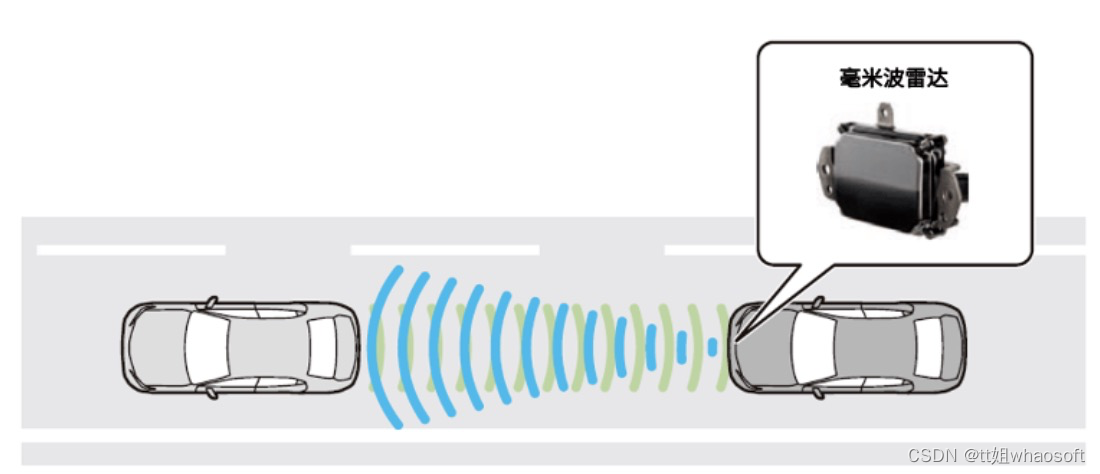
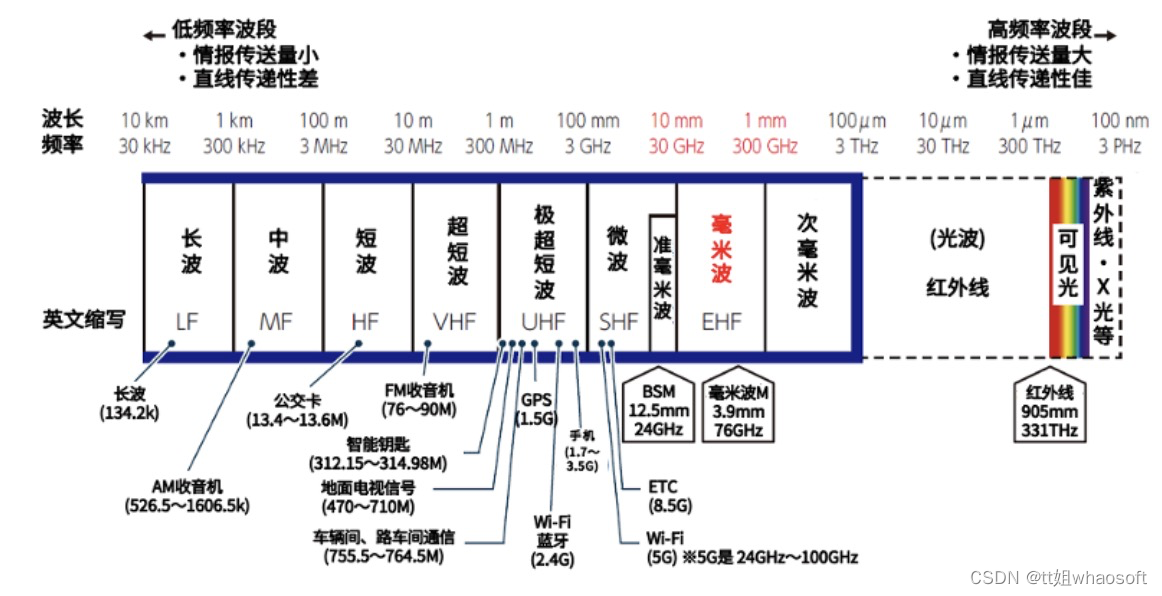
毫米波雷达是通过毫米波段的电波测量距离、相对距离、方向等的雷达传感器。在驾驶过程中向前方发射毫米波段的电波,若前方有车辆,则可收到反射回来的回波。通过分析检测到的反射波频率变化等,检测前方及对面是否有车辆、与前方及对面车辆间的距离、相对速度和方向等。
毫米波雷达的分类
车辆上搭载的毫米波雷达通常使用两个波段。毫米波雷达使用的是76GHz波段的电波(毫米波*1)。BSM使用的是24GHz波段的电波(准毫米波)。
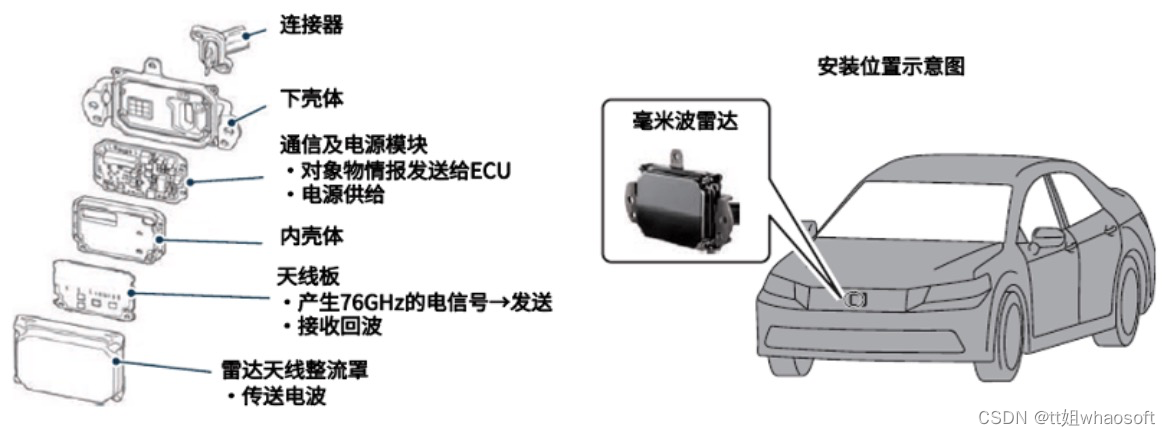
毫米波雷达的构成
毫米波雷达是由天线板、通信及电源模块等构成。
毫米波雷达的原理
通过FM-CW方式*2监测距离、相对速度和方向。
#激光雷达的原理和功能
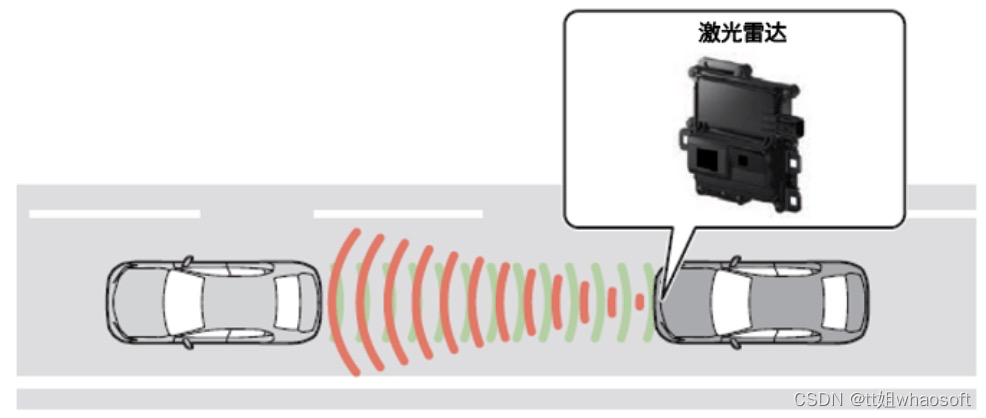
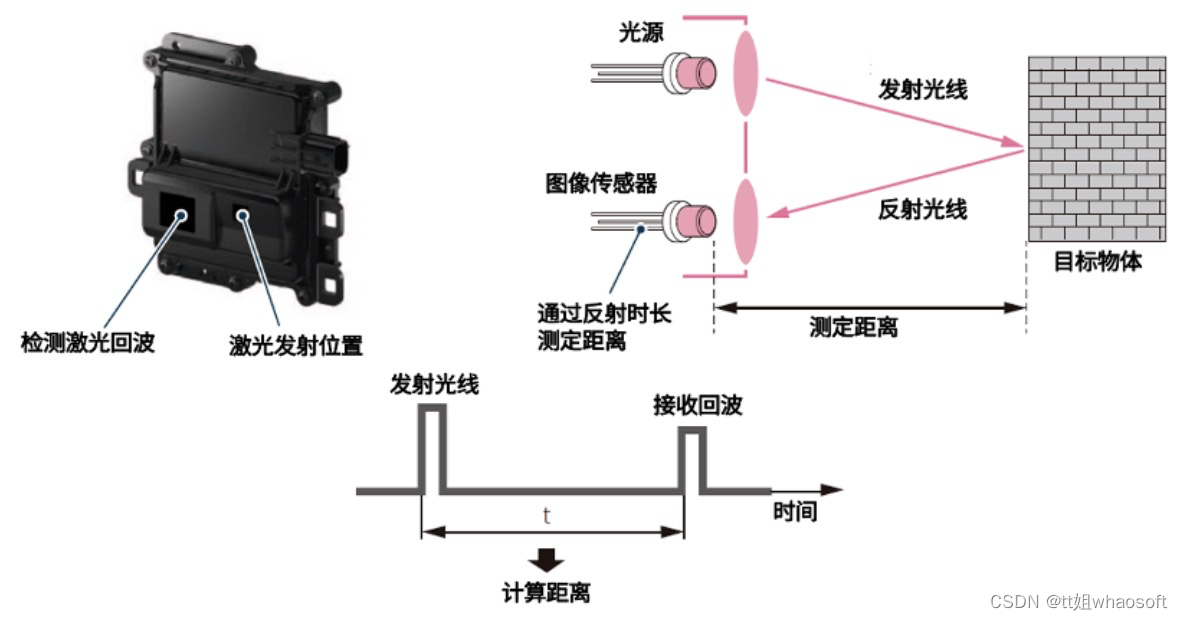
激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达。通过向目标发射探测信号(激光),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,从而获得目标的距离、方位、速度等相关信息。
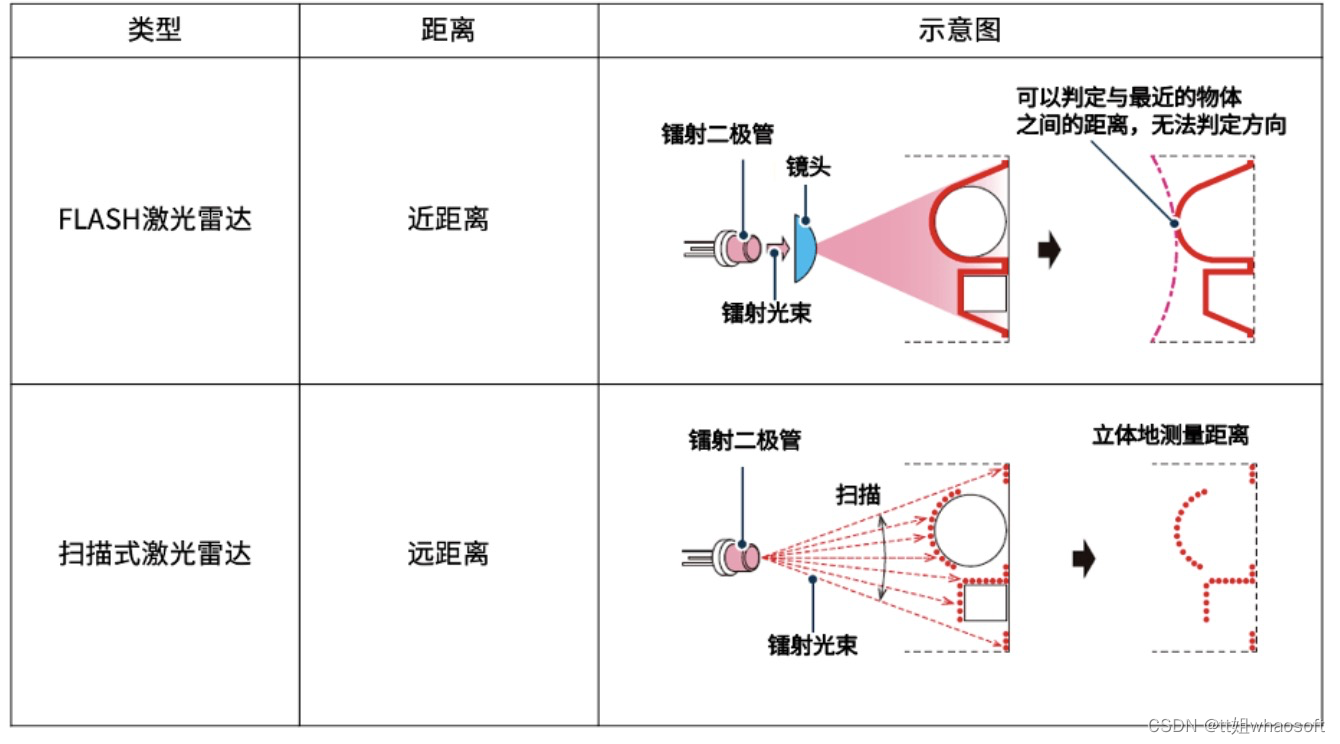
激光雷达的分类
针对测量距离的远近,激光雷达可分为非扫描式(FLASH)激光雷达和扫描式激光雷达。
摄像头传感器如何工作?
摄像头传感器通过获取摄像头拍摄的车辆周边的实景画面,从实景画面中抽取场景特征信息、调整显像浓度,对画面进行预处理。根据预处理结果,更容易辨别对象的特征及形状、颜色等信息,从而提高检测速度。
FLASH激光雷达
在短时间内向前方发射大面积的激光,依靠高灵敏度的探测器对回波信号进行收集并绘制成像。
扫描式激光雷达
被称为自动驾驶领域中必不可少的传感器。它可对车辆自身位置和目标物体之间的距离以及目标物体的形状进行分析,也可对包括行车道白线在内的道路形状等进行识别。
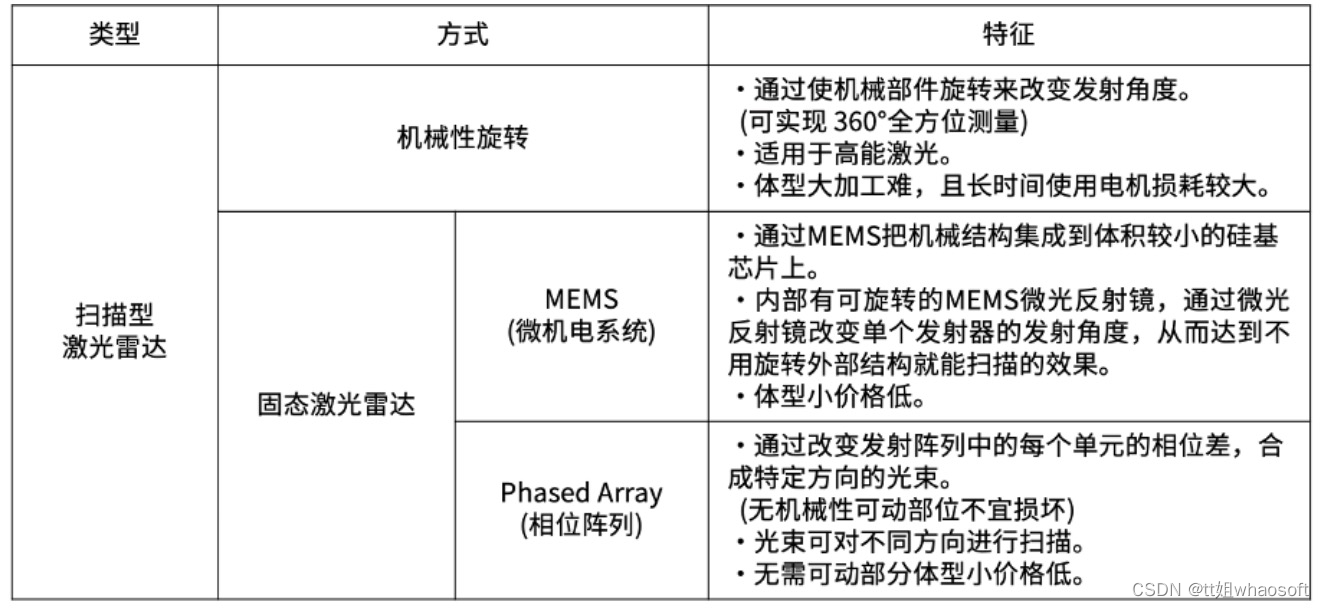
MEMS激光雷达
MEMS(Micro Electromechanical System)即微机电系统,是指尺寸在几毫米乃至更小的高科技装置,其内部结构一般在微米甚至纳米量级,是一个独立的智能系统。
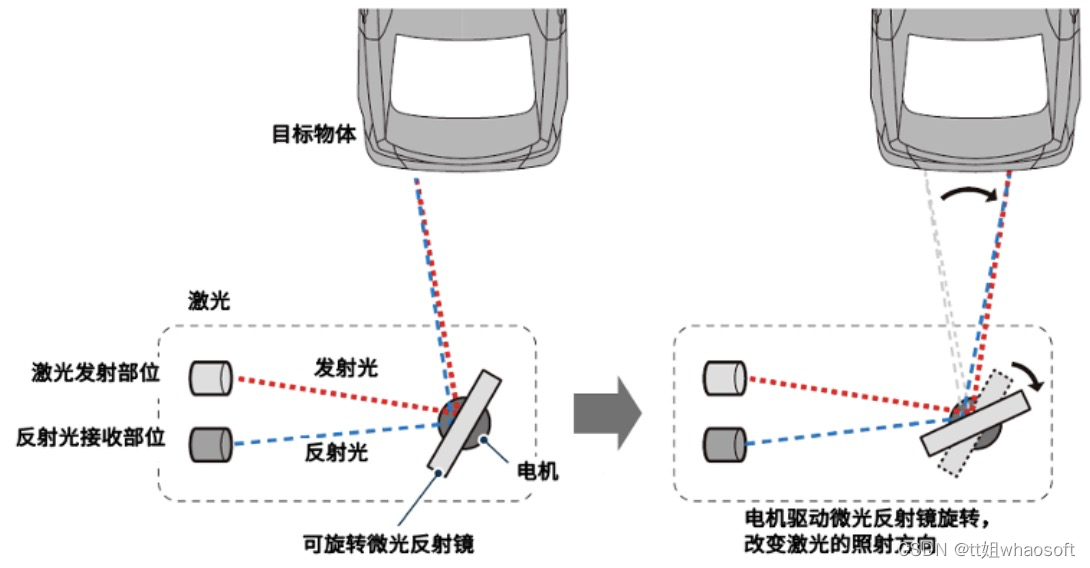
MEMS微光反射镜是指采用光学MEMS技术制造的,把微光反射镜与MEMS驱动器继集成在一起的光学MEMS器件。MEMS微光反射镜的运动方式包括平动和扭转两种机械运动。
通过可旋转MEMS微光反射镜改变发射光束的方向,对特定范围进行扫描。目标物体会反射扫描光束,接收部件会识别反射光。通过发射激光和接收到反射光的时间,可以测定与目标物体间的距离以及目标物体的大小。
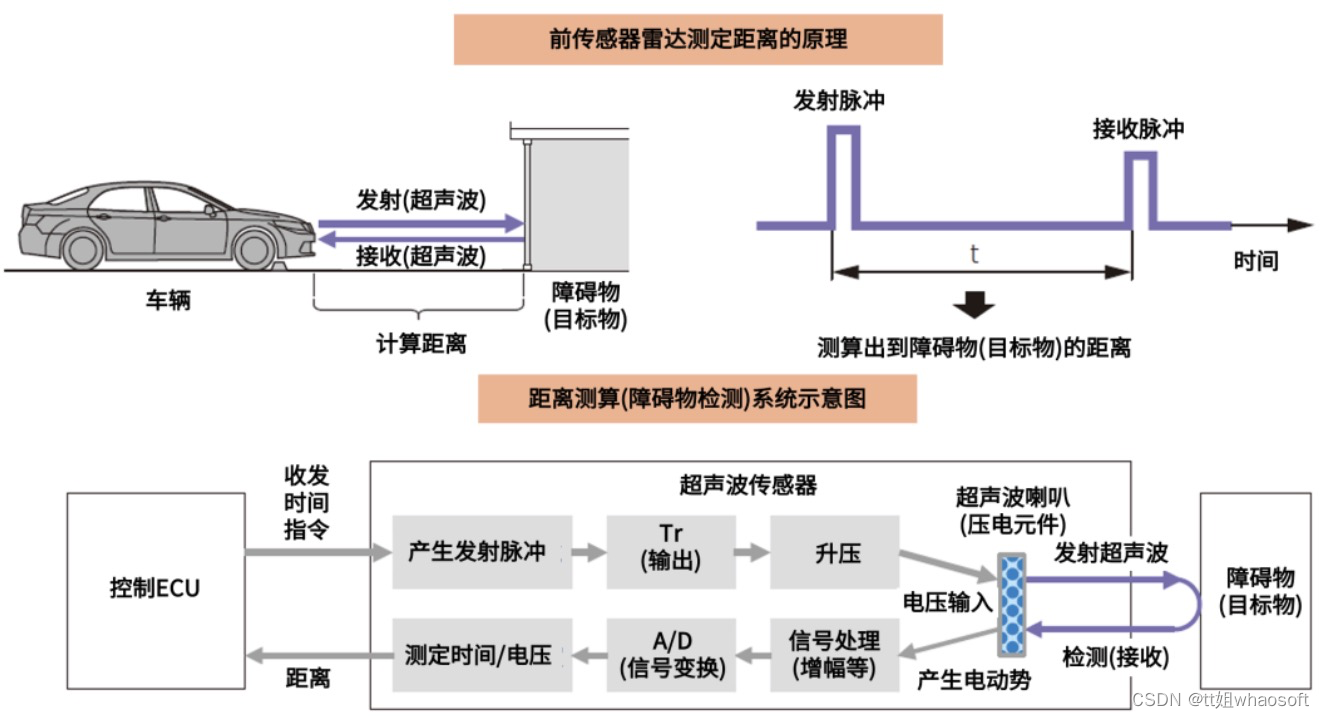
#超声波传感器的原理和功能
超声波传感器能被任何材质的障碍物所反射,并接收和放大障碍物反射的超声波脉冲,将超声波脉冲转换成数字信号。
因此超声波传感器一直被广泛地应用在汽车上,为驾驶员的安全出行提供辅助。
*参考:超声波所在频段人耳无法听到。
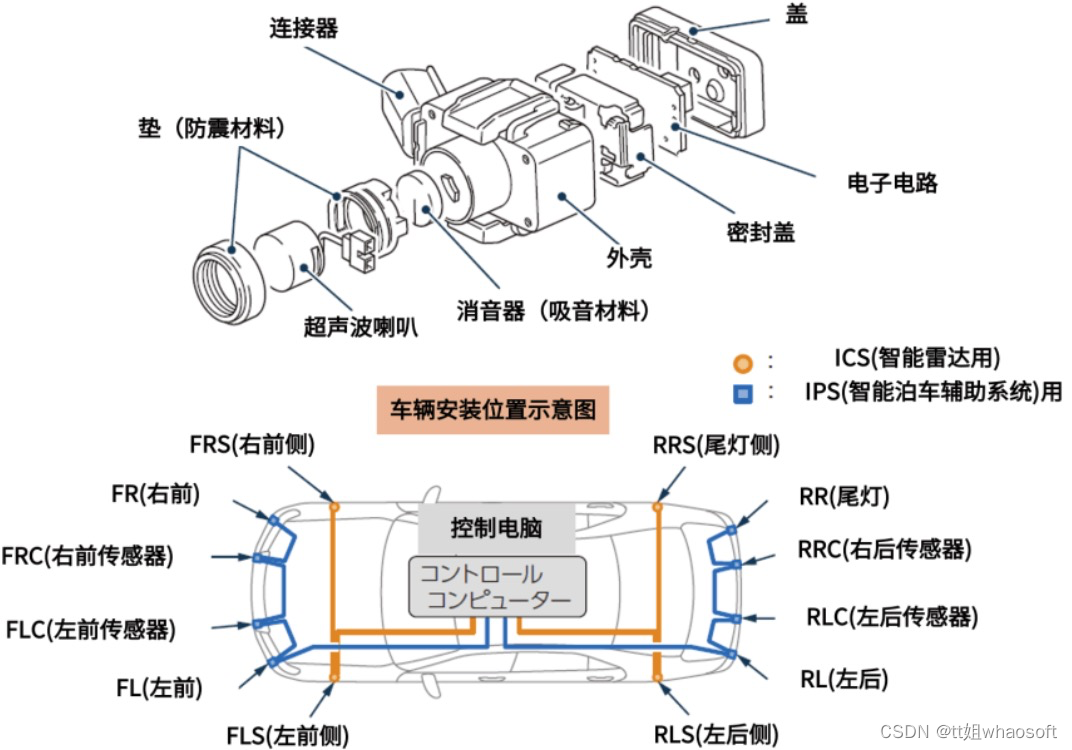
超声波传感器的构成
超声波传感器,由超声波喇叭、用于处理影像和计时的芯片等零部件组成。
超声波传感器如何工作?
超声波发射器发出超声波,超声波遇到障碍物会返回,超声波传感器正是根据发射波和回波之间的时间差来测定发射点到障碍物的实际距离。
怕脏的超声波传感器
但是强大如超声波传感器可是很怕脏污的,应始终保持表面干净。因为当其被异物附着时,超声波喇叭的震动(残响时间*1)会发生异常。例如超声波喇叭上附着霜(冰)、雪、泥等异物时,会影响超声波喇叭的正常功能。
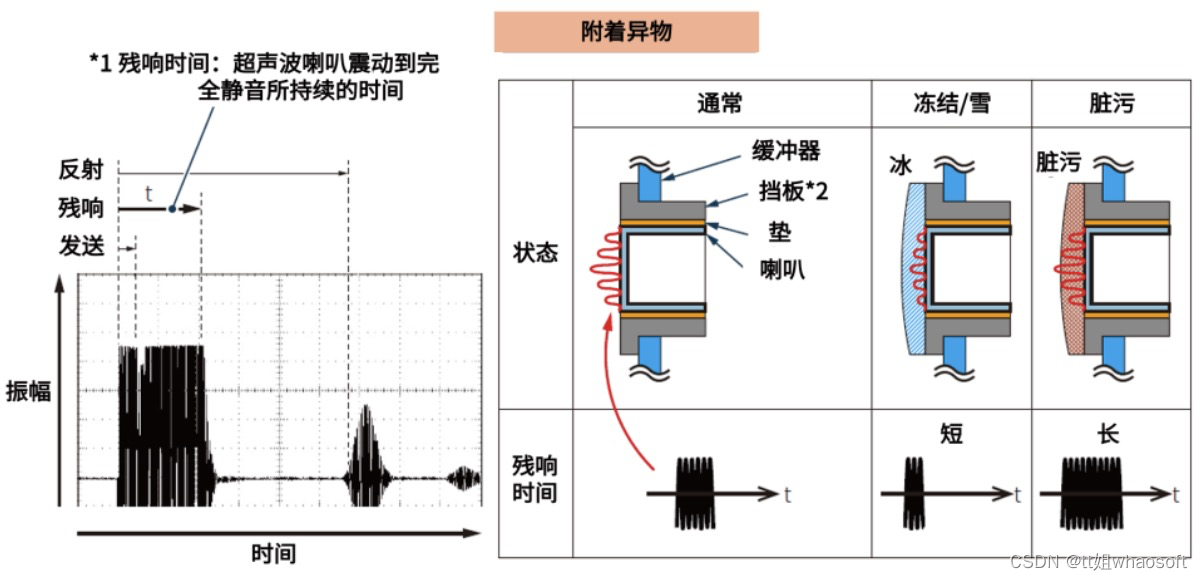
*2参考:挡板即护圈(保护零件),相当于超声波传感器嵌入车辆的缓冲器。
#摄像头传感器的原理和功能
摄像头传感器,顾名思义就是通过摄像头拍摄车辆周边场景,并以此来识别车辆、行人、行车线等的传感器。从拍摄到的影像可以检测出车辆及车灯、行车道的白线及标识、行人及自行车等。
摄像头传感器的分类和构成
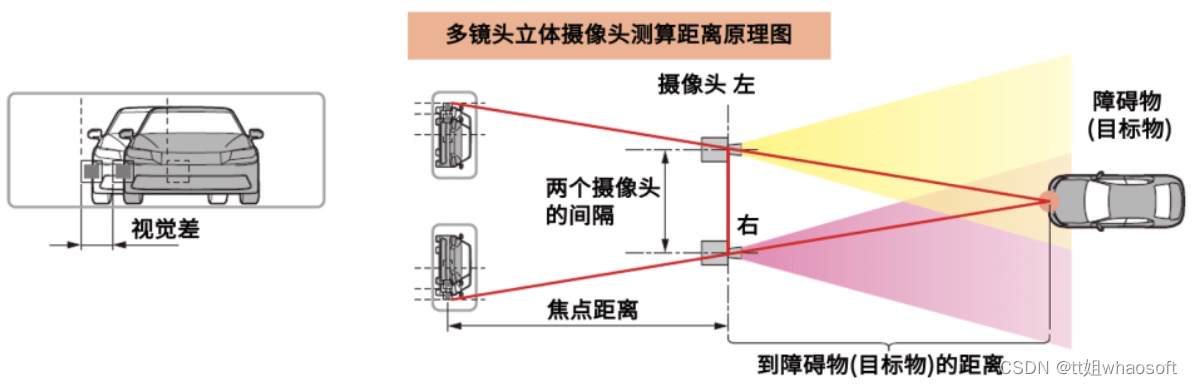
摄像头传感器分为单镜头摄像头和多镜头立体摄像头两种。单镜头摄像头识别的是平面影像,而多镜头立体摄像头内置2个摄像头,除了可以识别立体物体,还可以测算到目标物体的距离。
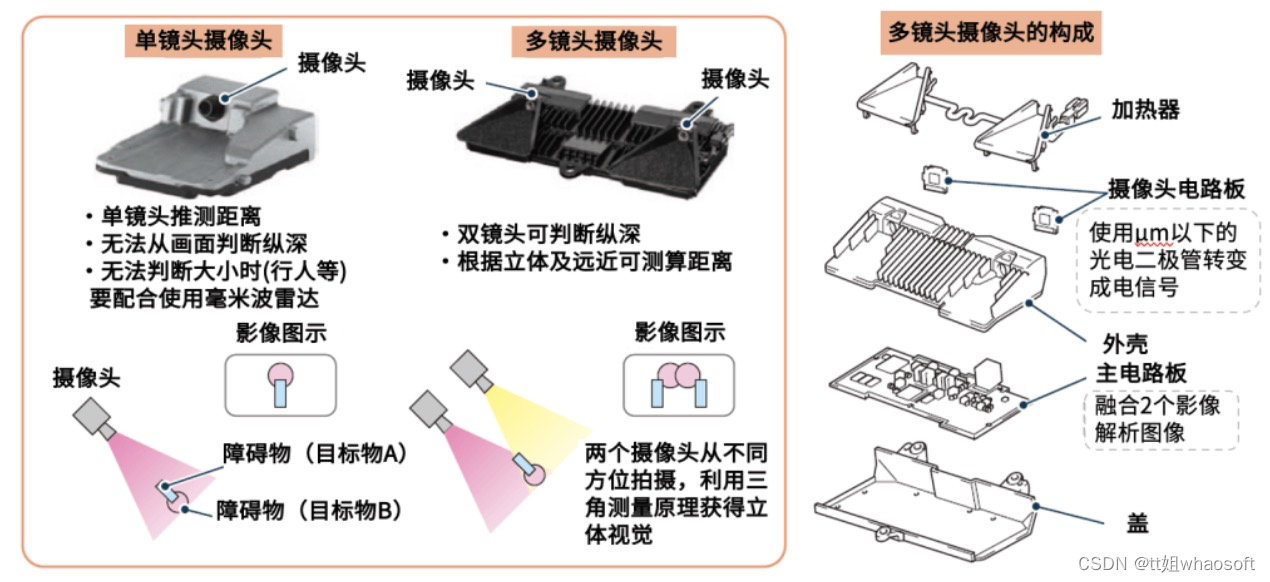
*参考:投影点坐标的位置不精确会影响检测精度。请确保镜头已得到充分的校正、调整。
摄像头传感器如何工作?
摄像头传感器通过获取摄像头拍摄的车辆周边的实景画面,从实景画面中抽取场景特征信息、调整显像浓度,对画面进行预处理。根据预处理结果,更容易辨别对象的特征及形状、颜色等信息,从而提高检测速度。
目标物体处理流程
图像传感器通过图像处理识别对象物体,根据驾驶辅助ECU检测到的信息进行内容识别、判断、控制车辆。
检测车道
从经过处理的图像上抽取边缘画面(亮度变化大的区域),从边缘画面中找出行车线标记(车道两侧的实线及虚线,直道显示为直线),通过行车线标记测定车道。
基于行车线信息获取车道中央位置、车辆行进方向及测算距离,从而识别、判断、控制车辆
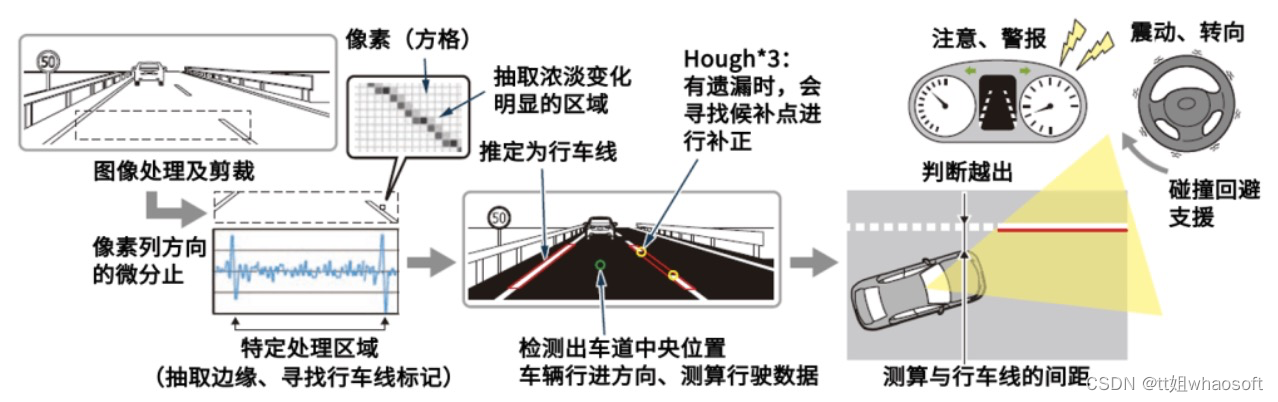
※参考3:Hough (霍夫变换)用于检测图像中的各类曲线(如直线、圆、抛物线、椭圆等),并以一定的函数关系进行描述,应用于影像分析、模式识别等很多领域。
检测道路标识
从经过处理的图像上抽取对应的候补点,寻找由各点分布构成的直线、曲线、平面等任意图形,按照特定的模板推定标识。通过标识信息进行判断并控制车辆。
检测行人
人物图像由于体型、姿势、衣着等因素影响较难识别。因此,从图像中区分出静止的背景和运动的人物,需要根据模型化部位(手脚等较大部位的图形)以及统计性特征(全身图像等)进行识别,符合特征的则被判定为行人。根据车辆与行人间的位置关系及测算的距离,识别、判断、控制车辆。
多镜头立体摄像头
单镜头摄像头拍摄到的某一个图像,在转化成二次元画面时,由于缺少目标物体纵深数据导致无法进行立体识别。而多镜头立体摄像头融合了2个摄像头拍摄的图像从而获得视觉差,并利用视觉差使用三件测量的方式计算出纵深数据。因此,立体地识别目标物体的大小及形状
注意:
除雾降温不可少
确保摄像头视野,图像传感器和镜片密封玻璃(前置摄像头)间配备镜头加热器。通过监控车外温度,镜头加热器加热除雾。当摄像头前方视野模糊时,图像传感器将停止工作。
另外,车辆在酷热等环境下停放后,图像传感器的温度会变得很高,可能会影响识别功能甚至过热停机。(温度降低后将正常工作)
三、EMC防护中的滤波电容
为什么总是在电路里摆两个0.1uF和0.01uF的电容?
旁路和去耦
旁路电容(Bypass Capacitor)和去耦电容(Decoupling Capacitor)这两个概念在电路中是常见的,但是真正理解起来并不容易。
要理解这两个词汇,还得回到英文语境中去。
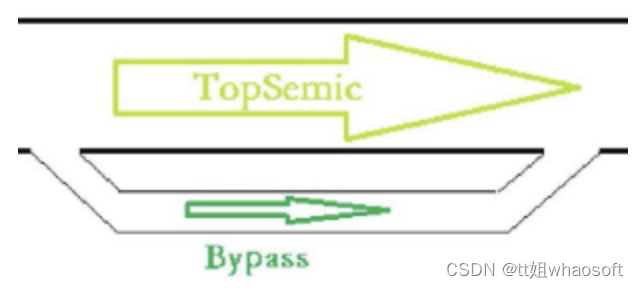
Bypass在英语中有抄小路的意思,在电路中也是这个意思,如下图所示。
couple在英语中是一对的意思,引申为配对、耦合的意思。如果系统A中的信号引起了系统B中的信号,那么就说A与B系统出现了耦合现象(Coupling),如下图所示。而Decoupling就是减弱这种耦合的意思。
电路中的旁路和去耦
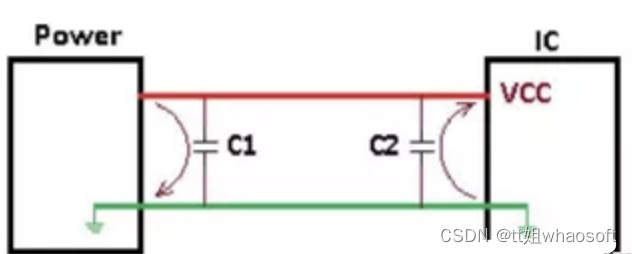
如下图中,直流电源Power给芯片IC供电,在电路中并入了两个电容。
旁路
如果Power受到了干扰,一般是频率比较高的干扰信号,可能使IC不能正常工作。在靠近Power处并联一个电容C1,因为电容对直流开路,对交流呈低阻态。频率较高的干扰信号通过C1回流到地,本来会经过IC的干扰信号通过电容抄近路流到了GND。这里的C1就是旁路电容的作用。
去耦
由于集成电路的工作频率一般比较高,IC启动瞬间或者切换工作频率时,会在供电导线上产生较大的电流波动,这种干扰信号直接反馈到Power会使其产生波动。在靠近IC的VCC供电端口并联一个电容C2,因为电容有储能作用,可以给IC提供瞬时电流,减弱IC电流波动干扰对Power的影响。这里的C2起到了去耦电容的作用。
为什么要用两个电容
回到本文最开始提到的问题,为什么要用0.1uF和0.01uF的两个电容?
电容阻抗和容抗计算公式分别如下:
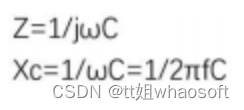
容抗与频率和电容值成反比,电容越大、频率越高则容抗越小。可以简单理解为电容越大,滤波效果越好。那么有了0.1uF的电容旁路,再加一个0.01uF的电容不是浪费吗?
实际上,对一个特定电容,当信号频率低于其自谐振频率时呈容性,当信号频率高于其自谐振频率时呈感性。当用0.1uF和0.01uF的两个电容并联时,相当于拓宽了滤波频率范围。
四、差模放大电路特点与抑制零漂原理
要想掌握差分放大电路,首先就要知道什么是差分放大电路以及它的作用。差分放大电路是模拟集成运算放大器输入级所采用的的电路形式,差分放大电路是由对称的两个基本放大电路,通过射极公共电阻耦合构成的,对称的意思就是说两个三极管的特性都是一致的,电路参数一致,同时具有两个输入信号。
它的作用是能够有效稳定静态工作点,同时具有抑制共模信号,放大差模信号等显著特点,广泛应用于直接耦合电路和测量电路输入端。
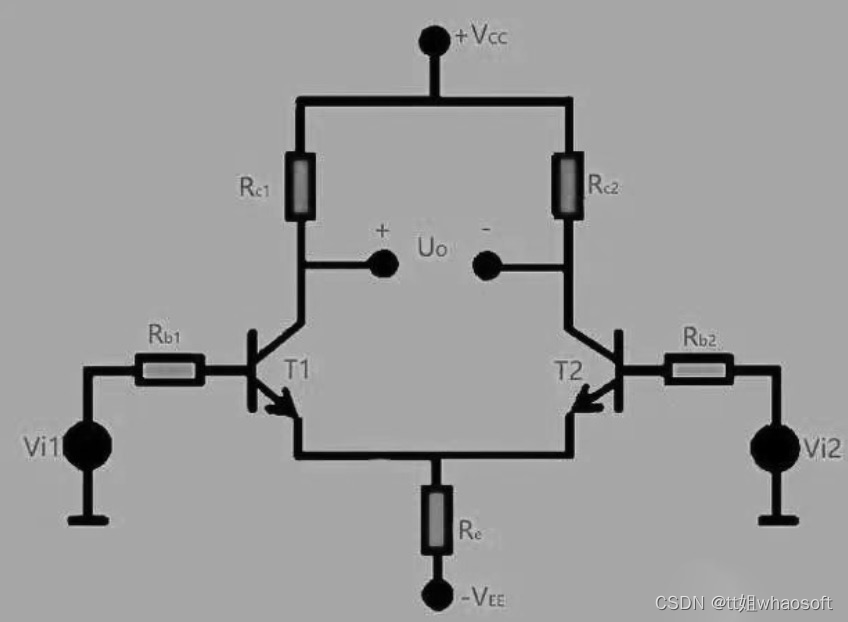
差模放大电路特点
- 电路两边对称
- 两个管子公用发射机电阻Re
- 具有两个信号输入端
- 信号既可以双端输出,也可以单端输出
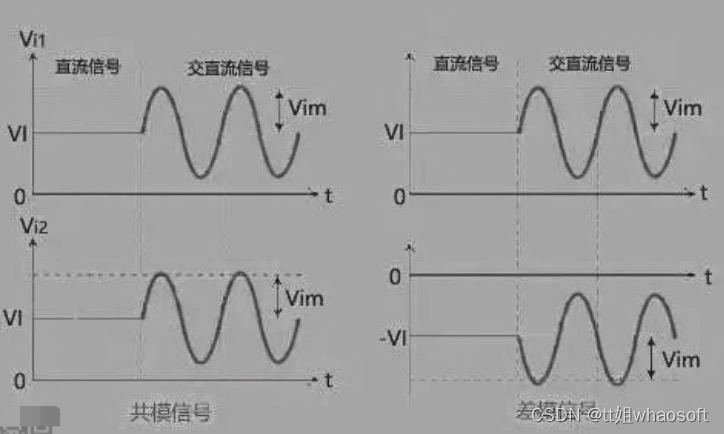
共模信号:大小幅度相等 极性相同的输入信号
差模信号:大小幅度相等 极性相反的输入信号
差分放大电路具有抑制零漂移稳定静态工作点,和抑制共模信号等作用,接下来一一分析。
首先我们的电路的工作环境温度并不是一成不变的,也就是说是时刻变化着的,还有直流电源的波动,元器件老化,特性发生变化都会引起零漂和静态工作点变化。
通常在阻容耦合放大电路中,前一级的输出的变化的漂移电压都落在耦合电容上,不会传入下一级放大电路。
但在直接耦合放大电路中,这种漂移电压和有用的信号一起送到下一级被放大,导致电路不能正常工作,所以要采取措施,抑制温度漂移,虽然耦合电容可以隔离上一级温漂电压,但是很多时候我们要接受处理的是很多微弱的、变化缓慢的弱信号,这类信号不足以驱动负载,必须经过放大。又不能通过耦合电容传递,所以必须通过直接耦合放大电路,那么直接耦合典型电路:就是差分放大电路。
通常克服温漂的方法是引入直流负反馈,或者温度补偿。
接下来谈谈直接耦合电路中,差分放大电路如何抑制零漂电压稳定工作点,和抑制共模信号,并放大差分信号的。
抑制零漂的原理
首先T1和T2特性相同,电路两边对称,在输入电压Vi1=Vi2=0V当温度T一定时,流过T1的电极电流与流过T2集电极的电流一致 即ic1=ic2,那么T1和T2上两个集电极电阻的压降是相等的所以Uo1=Uo2那么输出电压Uo就等于零即Uo1-Uo2=Uo=0所以这个电路可以抑制零漂的。
那么当温度增加△T的时候还能抑制零漂吗?答案是能,因为两边对称性能是一样的它们工作在统一环境下,当温度上升△T时,流过两个管子集电极的电流也是相等的,即(ic1+△ic1)=(ic2+△ic1) 那么加在两个集电极的电压也是相同的,所以输出电压Uo任然为0。所以在双端输出的情况下,
那么在单端输出的时候还可以抑制零漂吗? 当然可以,在单端输出时可以取值Uo1或者Uo2,这里以Uo1输出为例,因为射极电阻Re的负反馈作用,并且Re是T1和T2射极的共用电阻所以流过Re的电流是2倍的ie所以负反馈作用更好,所以可以稳定静态工作点,抑制零漂。
- 共模信号:当Vi1与Vi2大小相等,极性相同的输入信号时,共模信号的作用,对两管的作用是同向的,将引起两管电流同量的增加,集电极电位也同量的减小,因此两管集电极输出共模电压Uo=Uo1-Uo2=0,差分放大电路对共模信号有很好的抑制作用。
- 差模信号:当Vi1与Vi2大小相等,极性相反的输入信号时,由于信号的极性相反,因此T1管集电极电流增大而T2管集电极电流减小,且增大量和减小量相等。另外由于输入差模信号,两管输出端电位变化时,一端上升,另一端降低,且升高量等于降低量,所以差分电路对输入信号电压的差值是有用的,因此电路被称为差分放大电路。















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









