






刘溢鑫

摘 要: 为了提高足球射门的准确度,提出数据挖掘的足球最优射门角度分析算法。采用粒子群算法把球场规划为一个虚拟的网格环境,对足球射门路径点实时标定和叠加特性进行分析,根据球场环境中的信息素,粒子群算法实现进球概率优化求解,以路径适应度函数为优化目标函数进行射门角度特征数据挖掘,求得路径适应度函数的最优解即为最优射门角度的解向量。仿真结果表明,该算法可以在复杂程度不同的球场环境中规划出一条最优进球路径,可以用于指导足球训练。
关键词: 数据挖掘; 射门角度; 粒子进化; 路径适应度函数
中图分类号: TN911.1?34; TP391.9 文献标识码: A 文章编号: 1004?373X(2017)17?0124?03
Data mining based analysis algorithm of football optimal shooting angle
LIU Yixin
(Chengdu College, University of Electronic Science and Technology of China, Chengdu 611731, China)
Abstract: In order to improve the accuracy of football shooting, a data mining based football optimal shooting angle analysis algorithm is proposed. The particle swam algorithm is used to plan the football field as a virtual network environment, calibrate the path point of football shooting in real time, and analyze the superposition characteristics. According to pheromone in football field environment, the particle swam algorithm is adopted to perform optimization solution for the goal probability. The path fitness function is taken as the optimal target function to carry out data mining for shooting angle feature. The obtained optimal solution of path fitness function is deemed as the solution vector of optimal shooting angle. The simulation results show that the algorithm can plan an optimal goal path in football field environment with different complexities, and is applicable for the guidance of football training.
Keywords: data mining; shooting angle; particle evolution; path fitness function
0 引 言
足球是當前世界上最为流行的运动项目之一,随着各个国家对足球运动发展的重视,对足球运动的科学训练研究受到人们的重视。足球射门是赢得比赛的关键环节,足球射门的技巧性较强,需要对足球射门角度进行最优化求解,通过建立足球射门角度分析的数学模型,采用计算机仿真和数学建模方法进行最优射门角度分析,实现对足球射门训练的科学分析,提高进球概率,结合射门路径规划进行足球射门运动轨迹的路径分析,能够以合理的射门角度完成射球。
为了更好地完成足球射门训练,提出基于数据挖掘的足球最优射门角度分析算法,采用数据挖掘分析方法进行足球最优射门角度模拟分析,包括球场网格环境的建立,适应度函数构建和路径规划,最后通过仿真实验进行验证分析。
1 足球场运动轨迹虚拟网格环境设计
首先把球场规划为一个虚拟的网格环境,根据复杂适应系统理论[1]及粒子群进化算法对足球射门的飞行路径点进行粒子编码,通过粒子编码释放一种信息素进行足球的射门角度和路径引导,设置初始位形,获得目标位置的地形,采用算法把球场规划为一个虚拟的网格环境[2],构建一个10×10的网格结构模型表示足球运动场的虚拟网格结构,如图1所示。
在图1所示的足球运动场的虚拟网格结构中进行最优射门角度的路径解向量分析,构建多叉树混合网络,获得抓取目标解,在进行足球最优射门角度优选过程中,设时刻粒子群的先验信息特征点分布为足球飞行轨迹中的目标移动点为,采用随机采样位形扩展方法进行足球射门的偏转角和飞行弧度估计,定义环境参数描述空间内每点处的障碍信息,表示防守队员的位置信息素特征量,第个防守队员的位置为粒子的最优位置,表示为,则足球射门的初始位形与目标落地点的距离为:
(1)
2 粒子群算法的足球射门路径参数标定
采用粒子旋转门策略进行足球射门的路径点实时标定和叠加特性分析,根据足球射门后的飞行方向、距离、速度等向量,采用粒子算法[3]得到粒子个体的位置向量解表示为。0表示此地点信息素初始化时较小,每个粒子追随当前的种群达到最优射门角度时信息素接近于1。根据球场环境中的信息素进行粒子全局最优位置寻优[4],假设足球射门路径点的最大迭代次数为当前迭代代数为得到整个种群的全局最优位置的惯性权重为:endprint
(2)
采用粒子计算方法得到目标进球位置点处粒子群个体在时刻的位置初始位形向量为足球落地点的位置更新迭代式为:
(3)
设置足球飞行过程中的旋转轨迹随机扩展标记位置更新公式如下:
(4)
式中:为种群走过的路径;为惯性权重;为智能体当前点的适应度系数;为邻阶选择因子;和为旋转粒子门的信息素。
根据球场环境中的信息素进行粒子计算实现进球概率优化求解,在一次迭代完成后进行最优位置局部寻优,得到旋转粒子门中出来的目标点姿态信息度为:
(5)
式中:为运动中的足球在时刻运动方位的估计值,足球在时刻的姿态信息度得到足球射门路径粒子群标定的信息素为:
(6)
其中,足球射门路径相交于点和点的方位置信度为:
(7)
根据贝叶斯定理[5],足球射门路径的飞行路径数据根据其过去的测量值得到,根据上述设计,基于动态椭圆曲线求解方法得到射门角度粒子挖掘的递归计算表达式为:
(8)
通过路径向量的叠加特性分析[6]可知足球的当前位姿及期望射门角度仅和相关,即:
(9)
应用粒子群算法求解足球有效射门的方位角,则有:
(10)
3 数据挖掘的足球最优射门角度计算
基于最优高斯随机游走和个体筛选策略的差分进化方法进行数据挖掘[7?8],根据球场环境中的信息素进行粒子计算,实现进球概率优化求解,进球概率密度函数为:
(11)
根据粒子群体信息交换机制对足球射门的路径点进行粒子比特编码,求出路径适应度解向量路径点信息解满足采用路径方法对进行调整加权得到足球最优射门角度的特征参量数据挖掘的加权值为:
(12)
式中:为球场环境中信息素的选择因子。
根据球场环境中的信息素进行粒子计算,实现进球概率优化求解,得到最优解为:
(13)
综上分析,构建足球射门的路径适应度函数:
(14)
以此为优化目标函数进行射门角度特征数据挖掘,最优射门角度的解向量为:
(15)
当,此时通过上述分析,采用数据挖掘算法得到射门规划优化下的射门运动最短路径,且能够以合理的射门角度实现射门进球。
4 结果与分析
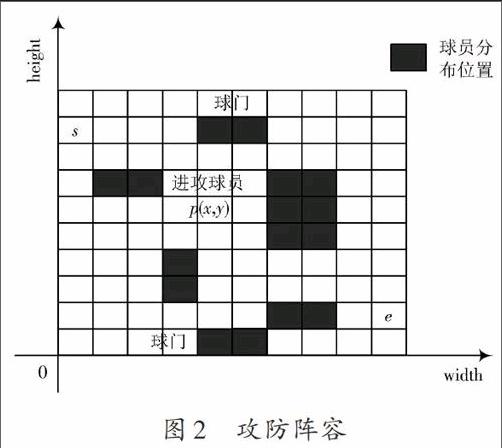
实验构建虚拟的足球运动场分布环境,采用Matlab仿真工具进行数据挖掘算法设计和相关参数选择,仿真实验的硬件环境为:Intel Core3?530 1 GB内存,操作系统为Windows 7,结合图1所示的足球运动场的虚拟网格结构,布置球门和攻防阵容如图2所示。
在上述仿真环境中,取标准的11人制足球运动场为测试环境,得到在静态环境中的足球攻防路径分布如图3所示。
图4给出了在静态环境下的足球射门角度路径分布图。分析图4得知,采用本文方法在静态环境下进行足球最优射门角度分析,利用粒子态的叠加特性能准确实现最优路径计算。
图5给出采用本文方法和传统方法在动态未知环境下分别采取射门初始速度为15 m/s和5 m/s的射门角度和路径计算结果。
分析结果可见,采用本文方法规划出的足球射门角度与理想最優路径吻合,表1给出了足球最优射门角度计算参量分析结果,分析得知,本文方法能在较短的时间内规划出足球射门的最优角度,计算开销较低,准确性较好。
5 结 语
本文提出基于数据挖掘的足球最优射门角度分析算法,采用粒子群算法实现对足球最优射门角度的最优特征参量求解。研究结果表明,该算法进行足球最优射门角度求解,在复杂程度不同的球场环境中能规划出一条最优进球路径,对指导足球训练具有一定的实用价值。
参考文献
[1] 乔俊飞.动态路径规划中的改进蚁群算法[J].清华大学学报,2010,48(z2):1748?1751.
[2] BLASI A, BARBATO S, MATTEI M. A particle swarm approach for flight path optimization in a constrained environment [J]. Aerospace science and technology, 2013, 26(1): 128?137.
[3] 吴宪祥,郭宝龙,龙娟.基于粒子群三次样条优化的移动机器人路径规划算法[J].机器人,2010,31(6):556?560.
[4] 赵娟平,高宪文,符秀辉,等.移动机器人路径规划的改进蚁群优化算法[J].控制理论与应用,2011,28(4):458?461.
[5] 罗乾又,张华,截兴哲,等.改进人工势场法在机器人路径规划中的应用[J].计算机工程与设计,2011,32(4):1411?1415.
[6] 梁聪刚,王鸿章.微分进化算法的优化研究及其在聚类分析中的应用[J].现代电子技术,2016,39(13):103?107.
[7] 李牧东,赵辉,翁兴伟,等.基于最优高斯随机游走和个体筛选策略的差分进化算法[J].控制与决策,2016,31(8):1379?1386.
[8] 王勋,张代兵,沈林成.一种基于虚拟力的无人机路径跟踪控制方法[J].机器人,2016,38(3):329?336.endprint















 720
720











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









