







简介:本文提供了一套详细的指南,介绍如何构建一个高效、精确的数字化智能声速测量系统,适用于海洋勘探、材料检测和医学超声等领域。系统通过结合传统声学原理与现代电子技术,利用先进的数字化处理技术提升测量精度和效率。指南涵盖了系统的构成、工作原理以及在实际中的应用优势,详细介绍了硬件组件、软件设计和智能化特性。 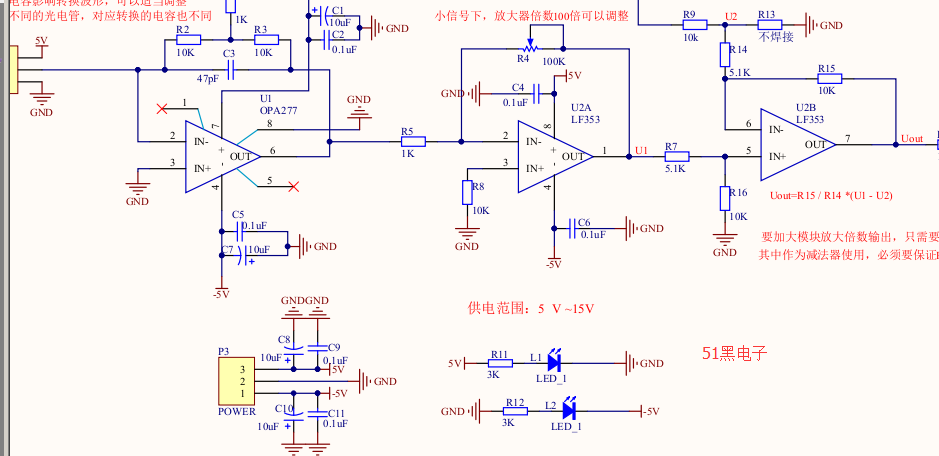
1. 系统构成与原理介绍
1.1 系统基本构成
一个声速测量系统主要由硬件组件和软件处理两大部分组成。硬件部分负责声波的发送、接收和信号转换,软件部分则涉及数据采集、信号处理和结果展示。整个系统的协同工作能够实现精确的声速测量。
1.2 声波在介质中的传播原理
声波在介质中的传播速度受到介质的密度、弹性模量和温度等多种因素的影响。通过测量声波在已知条件下的传播时间,可以计算出声速,进而推算出介质的其他物理特性。
1.3 系统工作流程解析
首先,系统通过发射器发出声波信号,声波在介质中传播并被接收器接收。接收的信号经过放大和滤波处理后,转换为数字信号,供软件进行分析计算。最终,通过软件算法得出声速及其他相关信息。
graph TD
A[声波发射] --> B[声波传播]
B --> C[声波接收]
C --> D[信号放大与滤波]
D --> E[数据采集]
E --> F[软件处理]
F --> G[计算声速]
G --> H[展示结果]
这个工作流程图简明地展示了声速测量系统的操作流程,帮助读者从宏观上理解系统的工作原理。在实际应用中,每个环节都需要精细的操作和优化,以保证数据的准确性和可靠性。
2. 声速测量技术应用领域
声速测量技术作为一门精密的技术,在多个领域中发挥着关键作用。本章节将详细探讨声速测量技术在海洋学、医疗、工程等领域的应用。
2.1 声速测量技术在海洋学中的应用
声速在海洋学中有着极其重要的应用,它在海洋深度测量和海流监测等领域中发挥着不可替代的作用。
2.1.1 海洋深度测量
在海洋深度测量方面,声速测量技术利用声波在水中的传播速度来确定水深。声波发射后,测量声波从发射点到海底的往返时间,根据声波在海水中已知的传播速度,可以计算出水深。由于声波在水中的传播速度会受到温度、盐度和压力的影响,因此需要进行修正以获得更精确的测量结果。
graph LR
A[声波发射] --> B[声波传播]
B --> C[声波反射]
C --> D[信号接收]
D --> E[数据分析]
E --> F[计算水深]
2.2 声速测量技术在医疗领域的应用
在医疗领域,声速测量技术通过超声波的传播特性和人体组织对声波的反射和散射特性,可以实现组织结构和特性的无创检测。
2.2.1 医学超声成像
医学超声成像技术通过超声波的反射原理,向人体发射超声波并接收由组织反射回来的信号,利用声波在不同组织中的传播速度和反射特性生成图像。医学超声成像技术在临床诊断中已成为不可或缺的工具,如心电图、产科检查等。
graph LR
A[超声波发射] --> B[超声波传播]
B --> C[超声波反射]
C --> D[信号接收]
D --> E[图像重建]
2.3 声速测量技术在工程领域的应用
声速测量技术在工程领域同样扮演重要角色,特别是在非破坏性检测与结构健康监测方面。
2.3.1 非破坏性检测
非破坏性检测(NDT)利用声波检测材料或构件内部的缺陷,例如裂缝、空洞等,而不会对材料或构件造成损伤。声速测量技术在此领域中利用声波在不同介质中的速度变化来检测内部结构的完整性。
2.3.2 结构健康监测
结构健康监测(SHM)通过长期监控建筑物或桥梁等结构的健康状况,提前预警可能出现的安全问题。声速测量技术可以通过监测声波在结构中的传播时间变化来判断结构是否有损伤或变化。
在以上应用领域中,声速测量技术都扮演着至关重要的角色。它不仅提高了数据测量的精确性,而且通过声波与介质相互作用的特点,为无创检测提供了可能。在海洋学中,声速测量技术帮助我们了解海洋深处的秘密;在医疗领域,它让医生能够更精确地诊断疾病;而在工程领域,它保障了建筑物和设施的安全运行。随着技术的不断进步,声速测量技术将会在更多领域展现其不可替代的作用。
3. 硬件组件功能说明
3.1 传感器技术与数据采集
3.1.1 传感器工作原理与分类
传感器是声速测量系统中的重要组成部分,它负责将声波信号转换为电信号。传感器的工作原理一般基于压电效应或电磁感应原理。在压电传感器中,材料如石英或某些陶瓷受到声波的压力时会产生电压变化;在电磁传感器中,则是通过线圈与磁场的相互作用来产生电信号。
传感器按用途可以分为不同的类型,其中包括但不限于: - 压力传感器:测量水下压力变化,进而推导出声波在介质中的传播速度。 - 温度传感器:监测声速传播介质的温度变化,因为声速受温度影响显著。 - 加速度计:用于检测与声波传播方向相关的加速度,常用于结构健康监测领域。
3.1.2 数据采集系统的构建
数据采集系统的构建是硬件组件设计的关键步骤,涉及到信号的获取、放大、滤波和转换。该系统需要满足一定的技术参数,例如采样率、分辨率和频率响应范围。硬件部分通常包括数据采集卡和相关接口电路。
- 数据采集卡(DAQ卡) :此卡负责将模拟信号转换为数字信号,并提供给计算机进行进一步处理。
- 接口电路 :包括信号调节电路,确保信号在转换之前达到适当的电平,并去除噪声干扰。
接下来,构建数据采集系统的一个关键步骤是选择适合的软件平台,用于数据记录、处理和分析。LabVIEW、MATLAB和Python等软件都是不错的选择,它们提供了丰富的信号处理和分析工具箱。
3.2 信号放大与滤波技术
3.2.1 信号放大器的设计与应用
信号放大器是将传感器产生的微弱信号进行放大,以便于后续处理。放大器的主要参数包括增益、带宽、输入/输出阻抗和噪声水平。设计时要考虑到信号频率、动态范围和电源需求等因素。
在声速测量系统中,通常会用到运算放大器(如LM358或OPA211)来设计信号放大电路。此类电路常包括一个反馈电阻和一个输入电阻来确定放大倍数,以及一个电容来构成低通滤波器,以滤除信号中不必要的高频噪声。
下面是一个简单的信号放大器电路设计示例:
flowchart LR
A[声波信号] -->|输入| B[放大电路]
B -->|放大| C[输出信号]
C -->|输入| D[滤波器]
D -->|输出| E[采样与A/D转换]
3.2.2 滤波技术在信号处理中的作用
滤波是处理信号中重要的步骤之一,其目的是去除干扰信号并提取有用的信息。在声速测量中,滤波器可以去除来自环境的噪声或是其他频率成分的干扰,如使用低通滤波器可以去除高于截止频率的信号成分。
滤波器的种类多样,包括但不限于以下几种: - 低通滤波器:允许低于截止频率的信号通过。 - 高通滤波器:允许高于截止频率的信号通过。 - 带通滤波器:只允许一个特定频率范围内的信号通过。
滤波器的设计参数包括截止频率、通带纹波、阻带衰减和阶数。根据具体应用需求,可以使用模拟滤波器或者数字滤波器。在设计数字滤波器时,可以使用MATLAB中的Filter Designer工具来帮助确定滤波器参数。
3.3 传输与接口技术
3.3.1 数据传输介质与方法
声速测量系统中的数据传输介质包括有线和无线两种类型。有线传输通常使用同轴电缆、双绞线或者光纤,而无线传输则可能用到Wi-Fi、蓝牙或射频通信等方式。每种传输方式都有其特点和应用场合。
有线传输在确保数据传输的稳定性和安全性方面表现较好,尤其在需要远距离传输时,光纤通信提供了高速和高带宽的解决方案。然而,有线传输的缺点是安装和维护成本较高,且灵活性较差。
无线传输则提供了较高的部署灵活性和易用性,适用于临时搭建的测量场景。不过,无线传输易受环境干扰,且传输距离和速率受限于无线技术本身的特性。
3.3.2 硬件接口标准与通信协议
硬件接口标准定义了不同设备之间连接和通信的方式,确保信号传输的一致性和可靠性。在声速测量系统中,常见的接口标准有USB、RS-232、GigE和HDMI等。
例如,USB接口因其即插即用的特性在许多小型设备中得到广泛使用;RS-232在需要较远距离传输时经常被采用;GigE是针对工业级相机传输图像数据而设计的接口标准,传输速度快,适合于实时数据采集。
通信协议则定义了数据传输的格式和规则,确保数据能够在不同的设备间正确解析和处理。串行通信协议如RS-232/422/485定义了信号线和控制线的使用,以及时序问题。网络通信协议如TCP/IP提供了数据包传输的完整框架,包括数据的封装、寻址和传输。
通过恰当的接口和协议选择,可以确保声速测量系统的组件之间能够高效稳定地交换数据,并最终形成准确可靠的声速测量结果。
4. 软件设计与信号处理算法
4.1 软件架构与系统集成
4.1.1 软件架构模式选择
在现代声速测量系统中,软件架构的选择至关重要,因为它影响系统的可维护性、扩展性和性能。选择正确的架构模式能够确保声速测量系统能够高效处理信号,提供实时数据反馈,并且保证用户界面的直观性与响应速度。
常见的软件架构模式包括:
- 单体架构(Monolithic) :这种模式下所有功能集成在一个单一的应用程序中。它适用于小型系统,易于开发和理解,但不利于后期维护和扩展。
- 分层架构(Layered) :将系统分为多层,每层执行不同的功能(如表示层、业务逻辑层、数据访问层)。这种架构使得系统更加模块化,易于管理和维护。
- 微服务架构(Microservices) :在这种模式中,系统被分割成一组小型、松耦合的服务。每个服务围绕特定业务能力构建,并通过轻量级通信机制协同工作。微服务架构提高了系统的灵活性和可扩展性,但也带来了复杂的服务治理和数据一致性问题。
- 事件驱动架构(Event-Driven) :系统中的服务或组件通过事件来进行通信。当一个服务完成一个任务时,它会发布一个事件,其他服务订阅这些事件,并基于事件做出响应。事件驱动架构适合需要高度解耦和异步通信的场景。
在选择架构模式时,开发者需考虑到项目需求、团队规模、技术栈、预期的系统扩展性以及维护成本等因素。对于声速测量这类需要实时处理信号数据并具备较强实时性的系统,事件驱动架构或微服务架构可能会更加合适,因为它们可以提供更好的模块化和灵活性。
4.1.2 系统集成方法与工具
系统集成是将不同的软件模块、硬件设备以及数据源整合到一个统一的系统中。一个优秀的系统集成方案能够确保声速测量系统中各组件协同工作,无缝交换数据,并提供统一的用户接口。
系统集成的方法和工具有:
- 传统的集成方法 :包括点对点集成、企业服务总线(ESB)以及数据仓库等。
- 现代集成平台 :利用API网关、微服务架构、容器化技术(如Docker和Kubernetes)、消息队列(如RabbitMQ和Kafka)以及集成开发环境(IDEs)。
使用这些工具时,开发者会面临诸多挑战,如数据格式转换、通信协议的适配、系统间接口的标准化等问题。因此,在进行系统集成时,必须有明确的集成策略和工具,比如:
- API设计和管理 :通过RESTful API或GraphQL等标准化接口,实现系统间的服务调用和数据交换。
- 数据集成和转换 :采用ETL(Extract, Transform, Load)工具处理数据集成问题,确保数据在各个系统间同步。
- 服务集成与调用 :使用服务网格(Service Mesh)等技术来管理服务之间的通信和集成。
系统集成的成功依赖于对业务逻辑的深刻理解,对技术的熟练掌握,以及全面的测试。只有这样,声速测量系统才能在不同的应用场景中实现其功能,并提供准确可靠的结果。
4.2 信号处理算法介绍
4.2.1 傅里叶变换与频域分析
傅里叶变换是一种将时域信号转换为频域信号的数学工具,对于分析周期性和非周期性信号的频率成分至关重要。在声速测量中,傅里叶变换可以帮助我们从复杂的声音信号中提取出有用的频率成分,进而分析声波在不同介质中的传播特性。
傅里叶变换的数学公式为:
F(\omega) = \int_{-\infty}^{\infty} f(t) e^{-i\omega t} dt
其中,( F(\omega) )表示频率域中的信号,( f(t) )表示时域中的信号,( \omega )是角频率,( i )是虚数单位。
在实际应用中,我们通常使用快速傅里叶变换(Fast Fourier Transform,FFT)算法来高效计算离散信号的频谱。FFT算法比直接计算离散傅里叶变换(DFT)要快得多,因为它利用了DFT计算中的对称性和周期性,减少了计算量。
应用FFT算法进行声速测量的一个例子是在海洋学中,通过分析声波在水下传播的频域特性,研究声波传播速度和海水中的温度、盐度、深度等参数的关系。
4.2.2 小波变换在信号去噪中的应用
小波变换是一种强大的时频分析工具,它能够提供信号在时频空间中的局部化信息。与傅里叶变换不同,小波变换通过变换到不同的频率和尺度来分析信号,这使得它特别适合处理非平稳信号,如声音信号。
信号去噪是声速测量系统的一个重要步骤,而小波变换因其出色的去噪能力在这一领域中具有广泛的应用。
小波变换去噪的基本步骤如下:
- 信号的小波分解 :选择一个合适的小波母函数,并确定分解的层数。信号通过一系列的高通和低通滤波器被分解成不同尺度上的小波系数。
- 小波系数的阈值处理 :对分解得到的小波系数进行阈值处理,以去除噪声。这通常涉及选择一个阈值,并将小于该阈值的小波系数设置为零。
- 小波重构 :使用处理后的小波系数重构信号,得到去噪后的信号。
下面是一个Python代码示例,展示了如何使用PyWavelets库对一维信号进行小波去噪:
import pywt
import numpy as np
import matplotlib.pyplot as plt
# 产生一个包含噪声的信号
t = np.linspace(0, 1, num=256)
sig = np.sin(4 * np.pi * t) + np.random.normal(size=t.shape)
# 小波去噪
coeffs = pywt.wavedec(sig, wavelet='db1', level=4)
# 设置阈值并进行阈值处理
threshold = 0.5 * np.var(sig)
coeffs[1:] = (pywt.threshold(i, value=threshold, mode='soft') for i in coeffs[1:])
# 重构信号
reconstructed_signal = pywt.waverec(coeffs, wavelet='db1')
# 绘制结果
plt.figure(figsize=(10, 4))
plt.subplot(131), plt.title('Original signal'), plt.plot(sig)
plt.subplot(132), plt.title('Noisy signal'), plt.plot(sig)
plt.subplot(133), plt.title('De-noised signal'), plt.plot(reconstructed_signal)
plt.show()
在这个示例中,我们首先创建了一个包含噪声的信号,然后使用小波变换进行去噪,并重构信号。通过比较原始信号和去噪后信号的差异,可以验证小波变换在去噪上的有效性。
4.3 用户界面与交互设计
4.3.1 用户界面设计原则
用户界面(UI)设计是声速测量系统中非常重要的一个部分,它直接影响到用户体验(UX)的质量。在设计界面时,以下几个原则需要考虑:
- 简洁性 :界面应避免不必要的复杂性。去除冗余的元素和功能,使用户能够集中注意力在核心任务上。
- 一致性 :整个系统的UI元素和交互模式应保持一致,以减少用户的认知负担。
- 响应性 :设计应保证在不同的设备和分辨率上均有良好的显示效果和操作响应。
- 可用性 :确保界面直观易用,用户可以轻松地完成任务,无需过度思考或寻求帮助。
- 可访问性 :界面设计应考虑到不同能力和需求的用户,包括色盲用户、运动障碍用户等。
- 反馈 :系统应提供及时的反馈,让用户了解他们的操作是否成功,以及当前系统状态。
4.3.2 交互式操作流程与用户体验优化
交互式操作流程设计旨在通过合理的步骤和友好的提示来指导用户完成任务。在声速测量系统的UI设计中,以下几点尤为重要:
- 流程简化 :通过减少步骤数量和优化操作路径,让用户能够快速达到他们的目标。
- 明确的指示 :清晰地标识每一个可操作元素及其功能,并提供必要的帮助文档和教程。
- 错误预防 :通过设计,防止用户做出错误操作,或者在出现错误时提供明确的纠正建议。
- 进度和状态指示 :通过进度条、提示框等方式,让用户知道任务的完成度和当前系统的状态。
用户体验优化的目标是让所有用户都能够快速地掌握系统,并且在使用过程中感到愉悦。在声速测量系统中,这包括但不限于:
- 定制化与个性化 :允许用户根据自己的工作习惯对界面布局、颜色方案和功能模块进行定制。
- 快捷操作 :提供键盘快捷键和手势操作,以提高专业用户的操作效率。
- 适应性 :界面设计应能够适应不同水平用户的需要,为初学者和专家用户提供不同的交互模式。
- 迭代更新 :根据用户的反馈和系统使用数据分析,定期更新界面设计和交互流程。
以用户为中心的设计理念不仅能够提升系统的易用性,还能够增强用户对系统的信任和满意度,从而在实际应用中提高工作效率。
5. 智能化系统特性
智能化技术已经渗透到了声速测量系统的每一个角落,从硬件的自我诊断到软件的智能化分析,智能化系统正在逐步改变传统的声速测量方式。
5.1 智能化系统的功能与特点
在现代声速测量系统中,智能化功能的加入极大地提升了系统的效率和准确性。
5.1.1 系统自我诊断与校准功能
自我诊断功能是指系统能够自动检测自身运行状态,识别并报告硬件故障和数据异常。而校准功能确保了测量数据的准确性。这两个功能对于确保声速测量结果的可靠性至关重要。
graph LR
A[启动系统自我诊断] --> B[硬件状态检查]
B --> C{是否有异常}
C -->|是| D[报告故障并提示用户]
C -->|否| E[继续检测]
E --> F[数据校准]
F --> G[完成校准]
5.1.2 自动化数据处理与分析能力
自动化的数据处理与分析能力使得系统可以快速地从海量数据中提取有用信息,减少人工干预。这一特性尤其在需要长时间连续监测的应用中显得尤为重要。
# Python代码示例:自动化数据分析处理流程
import pandas as pd
from sklearn.preprocessing import StandardScaler
# 加载数据
data = pd.read_csv('data.csv')
# 数据预处理
scaler = StandardScaler()
scaled_data = scaler.fit_transform(data)
# 自动化分析流程
def analyze_data(data):
# 执行分析算法
result = data.mean()
return result
# 执行自动化分析
analysis_result = analyze_data(scaled_data)
print(analysis_result)
5.2 人工智能与机器学习在系统中的应用
人工智能和机器学习技术的集成,使得声速测量系统能够进行预测性分析和模式识别,为高级决策支持提供了可能。
5.2.1 人工智能算法集成
通过集成深度学习等AI算法,系统能够处理复杂的信号并识别出有用的模式,如预测海洋流动模式或检测潜在的结构问题。
# Python代码示例:使用深度学习模型进行信号分析
from keras.models import Sequential
from keras.layers import Dense
# 构建简单神经网络模型
model = Sequential()
model.add(Dense(64, input_dim=10, activation='relu'))
model.add(Dense(1, activation='sigmoid'))
# 编译模型
***pile(loss='binary_crossentropy', optimizer='adam', metrics=['accuracy'])
# 使用模型进行预测
# 假设 `signal_data` 是已经预处理好的信号数据
prediction = model.predict(signal_data)
5.2.2 机器学习模型训练与优化
机器学习模型的训练和优化是智能化系统中最为关键的环节之一。通过不断地训练和测试,模型能够逐步提高预测准确性,这对于长期监测和分析尤为重要。
# Python代码示例:使用交叉验证优化机器学习模型
from sklearn.model_selection import train_test_split
from sklearn.ensemble import RandomForestClassifier
# 分割数据集为训练集和测试集
X_train, X_test, y_train, y_test = train_test_split(features, labels, test_size=0.2)
# 训练随机森林模型
model = RandomForestClassifier()
model.fit(X_train, y_train)
# 交叉验证评估模型性能
from sklearn.model_selection import cross_val_score
scores = cross_val_score(model, X_train, y_train, cv=5)
print("Accuracy: %0.2f (+/- %0.2f)" % (scores.mean(), scores.std() * 2))
5.3 系统的可扩展性与兼容性
智能化系统的长期价值体现在其可扩展性与兼容性上,这不仅保证了系统的当前性能,也为未来的升级和扩展提供了可能。
5.3.1 系统升级策略与模块化设计
模块化设计允许系统中的各个组件独立更新或替换,这极大地提高了系统的可维护性和可升级性。升级策略则确保了升级过程中的稳定性和安全性。
5.3.2 系统与外部设备的兼容性分析
兼容性分析是确保声速测量系统能够与现有和未来可能出现的外部设备无缝对接的关键。这要求系统具备开放的接口和协议支持。
通过上述章节的介绍,我们理解了智能化系统如何利用其先进的功能和特性,提高声速测量技术的效率和精确性。未来的发展将更加依赖于智能化技术的创新和应用,不断推动声速测量技术向更高水平发展。
简介:本文提供了一套详细的指南,介绍如何构建一个高效、精确的数字化智能声速测量系统,适用于海洋勘探、材料检测和医学超声等领域。系统通过结合传统声学原理与现代电子技术,利用先进的数字化处理技术提升测量精度和效率。指南涵盖了系统的构成、工作原理以及在实际中的应用优势,详细介绍了硬件组件、软件设计和智能化特性。

















 1368
1368

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









