







最近看离散数学图的部分根据自己的理解,整理了一下笔记
图的基本概念
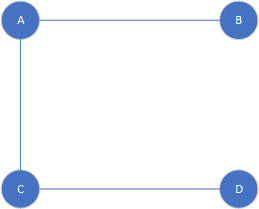
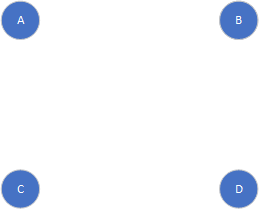
这里所说的图是一种抽象的数学概念,并不是图片图像什么的,类似质点的概念,只不过可以用图行化表示出来。比如有四个城市{A,B,C,D},我们想要描述他们之间的公路连通关系,我们画四个点,称为顶点(图中的顶点数>0),表示这四个城市
Fig1

这也算一个图了,但是顶点之间没有关系,这个关系称为边,这样的图被称为零图,对于没有边的任何一个顶点都是孤立顶点,上面就有A,B,C,D四个孤立顶点。
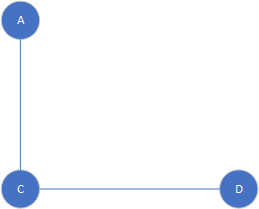
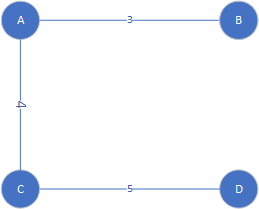
然后在相互之间连线表示互相连通,有以下的图,其中(A,B)互相连通,(A,D)不连通,其他同理
Fig2
上面说的是简单图,简单图指的是没有环和平行边的图,如果有平行边(即两个顶点之间有多条边,则他们是平行的),则这个图是多重图
Fig3

如果有环会出现以下情况(即一个顶点到自身有一条边,这条边就是环),下面的顶点B就有一个环,但这个属于多重图和简单图
FIg4

实际研究学习的时候,还接触到HyperGraph,读者可以自行到维基了解。
图的同构
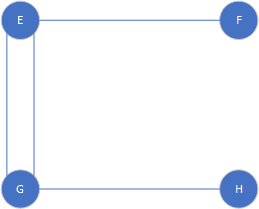
由于图是一种抽象关系的描述工具,实际上,我们如果把简单图中的A,B,C,D,换成E,F,G,H(如下图所示),他们表示的图也是相同的
Fig5
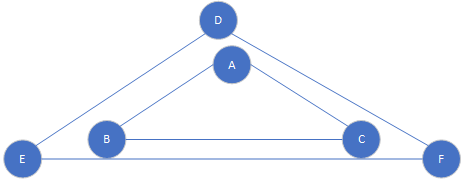
而在实际作图的过程中,每个城市可能会根据数量关系(之后介绍,即关于集合的部分)有不同的方式去画同一幅图,我们并不关心怎么画这图,而关注的是他们之间的关系,这样的图也是相同的。我们称这样两个相同的图是同构的。如下图所示,
Fig6
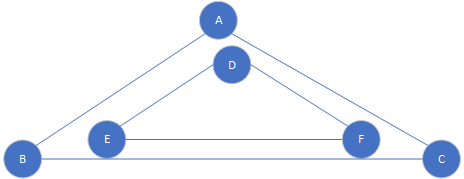
Fig7
子图
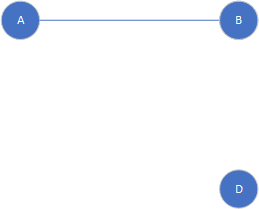
如果我们在某些场景下只需要表示,一个图部分顶点和部分边,就产生了子图的概念,最开始的图称为母图(也有称为始图的),而子图是保留母图中的部分顶点和部分边的结果(不能产生新的边),即顶点集合是母图的非空子集,边集合也是母图的子集。依旧拿上面的简单图A,B,C,D来说,以下都是它的子图,(当然还有很多)
去掉顶点的子图(顺带去掉了相应边)
Fig8
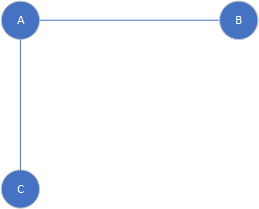
只去掉边的子图
Fig9
说到子图,不得不说一下子图相关概念,其中就有支撑子图,支撑子图指的是母图中所有的顶点都在子图中,但是母图中边可以不用都在子图里面,毕竟还是子集嘛,比如只去掉边的子图Fig9也是支撑子图,显然下面的图也是,(当然还是不止这些)
Fig10

其次还要说一下,诱导子图,诱导子图其实还是比较简单的,就是有一个子图,如果它包含了母图中的某些点,那么它必须包含这些点在母图中对应的边(如果之前顶点之间没有边就不管),所以上面只去掉边的子图Fig9的例子就不是诱导子图了,去掉顶点的子图Fig8的例子恰好是一个诱导子图,下面再举一个例子,没有顶点C的诱导子图
Fig11
补图
如果母图去掉子图包含所有的边剩下的图(节点数与母图相同),称为相对补图
子图
Fig12
该子图关于母图Fig2的相对补图
Fig13
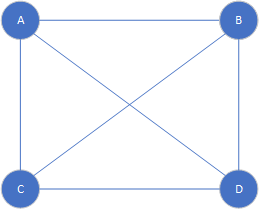
下面介绍一下完全图,完全图,简而言之,就是给定一个顶点集合,任意两个顶点之间都有边,比如对于ABCD来,他的完全图是这样的,对于更多顶点就会更加麻烦了。
Fig14
而实际上任意一个图都有补图,这个补图,是相对于它的完全图(严谨的说应该是它点集的完全图)的相对补图,
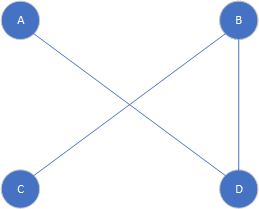
对于最开始的简单图ABCD来说它的补图其实就是这样的
Fig15
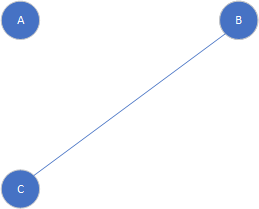
当然对于它的子图Fig12的补图,注意这里不是关于母图的相对补图了,是子图本身的补图,别弄混淆了,就
Fig16
权图
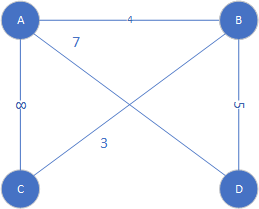
当我们要表示,城市间的距离的时候,我们可以再对应的边上加上一个实数,称为权值,用 ω \omega ω表示。比如我们再简单图ABCD加上路径长度时,就可以表示成这样,显然 ω ( A B ) = 3 \omega(AB)=3 ω(AB)=3, ω ( A C ) = 4 \omega(AC)=4 ω(AC)=4
Fig17
但是如果两个顶点之间没有边的存在,我们就认为他们之间的权值(距离)为无穷大,比如 ω ( A D ) = ∞ \omega(AD)=\infty ω(AD)=∞,有时候,我们可能用到顶点到自己的权值,所以我们规定 ω ( A A ) = 0 \omega(AA)=0 ω(AA)=0
路
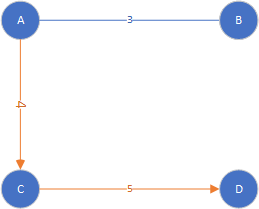
路实际上是两个顶点之间的路径,用顶点序列来表示(实际上我觉得用边序列来表示也可以),比如Fig17中的AD之间的路就表示为(A,C,D),实际上我们并没有规定每个顶点只走一次,所以(A,B,A,C,D)也算AD之间的路。下图是路(A,C,D)
FIg18
要是只走一次呢,就称为简单路(但是端点可以相同,所以(A,B,A)也算简单路),所以(A,C,D)是简单路,(A,B,A,C,D)不是简单路.
注意路中的顶点序列是相邻的,相邻即,在序列中,连续的两个顶点需作为同一条边的端点,比如顶点A和C相邻,A和D不相邻
最短路径
两个端点之间可能有多条路,比如下图AC之间有(A,C),(A,B,C),(A,D,C)等路径,其中路径上的边权值和最小的称为最短路径,经计算,AC之间最短路径是也刚好是(A,B,C)(有时候可能绕个弯却会更短),且路径长度为7,我们称这个AC最短路径长度为AC之间的距离,记为 d ( A , C ) = 7 d(A,C)=7 d(A,C)=7
Fig19
Dijkstra算法
我们再上面使用的计算最短路径的方法是枚举法,就是简单地举出所有路径,并计算长度,当图的规模变大了,比如包含几百个顶点,几万条边,这个方法就不靠谱了。下面介绍Dijkstra算法。
首先我们在最短路径那里定义了点之间的距离,下面引入点与点集合之间的距离,如下图所示,当整个图的点集 G G G为 { A , B , C , D } \{A,B,C,D\} {A,B,C,D}时,比如有一个点集合 S = { B , D } S=\{B,D\} S={B,D},一个点为 A A A,我们定义 A A A到 S S S的距离,为 A A A到 S S S中的每一点 v v v的距离最小值,记作 d ( A , S ) = min v ∈ S { d ( A , v ) } d(A,S)=\min\limits_{v\in S}\{d(A,v)\} d(A,S)=v∈Smin{d(A,v)},显然 d ( A , S ) = min { d ( A , B ) , d ( A , D ) } d(A,S)=\min\{d(A,B),d(A,D)\} d(A,S)=min{d(A,B),d(A,D)}
Fig20

我们可以在 S ′ = G − S S'=G-S S′=G−S中找到一点 u u u(可以是 A A A本身), 使得 d ( A , S ) = min v ∈ S { d ( A , v ) } = min v ∈ S u ∈ S ′ { d ( A , u ) + ω ( u , v ) } d(A,S)=\min\limits_{v\in S}\{d(A,v)\}=\min\limits_{v\in S\\u\in S'}\{d(A,u)+\omega(u,v)\} d(A,S)=v∈Smin{d(A,v)}=v∈Su∈S′min{d(A,u)+ω(u,v)}
所以可以有如下组合
当 u = A u=A u=A时, d ( A , A ) = 0 d(A,A)=0 d(A,A)=0, ω ( A , B ) = 4 \omega(A,B)=4 ω(A,B)=4, ω ( A , D ) = 7 \omega(A,D)=7 ω(A,D)=7,所以
min u ∈ S ′ { d ( A , u ) + ω ( u , v ) } = min { d ( A , A ) + ω ( A , B ) , d ( A , A ) + ω ( A , D ) } = min { 0 + 4 , 0 + 7 } = 4 \min\limits_{u\in S'}\{d(A,u)+\omega(u,v)\}=\min\{d(A,A)+\omega(A,B),d(A,A)+\omega(A,D)\}=\min\{0+4,0+7\}=4 u∈S′min{d(A,u)+ω(u,v)}=min{d(A,A)+ω(A,B),d(A,A)+ω(A,D)}=min{0+4,0+7}=4
当 u = C u=C u=C时, d ( A , C ) = 8 d(A,C)=8 d(A,C)=8, ω ( C , B ) = 3 \omega(C,B)=3 ω(C,B)=3, ω ( C , D ) = ∞ \omega(C,D)=\infty ω(C,D)=∞(这里不是距离,而是边的权值),有
min u ∈ S ′ { d ( A , u ) + ω ( u , v ) } = min { d ( A , C ) + ω ( C , B ) , d ( A , C ) + ω ( C , D ) } = min { 8 + 3 , 8 + ∞ } = 11 \min\limits_{u\in S'}\{d(A,u)+\omega(u,v)\}=\min\{d(A,C)+\omega(C,B),d(A,C)+\omega(C,D)\}=\min\{8+3,8+\infty\}=11 u∈S′min{d(A,u)+ω(u,v)}=min{d(A,C)+ω(C,B),d(A,C)+ω(C,D)}=min{8+3,8+∞}=11
综上所述
d ( A , S ) = min v ∈ S u ∈ S ′ { d ( A , u ) + ω ( u , v ) } = 4 d(A,S)=\min\limits_{v\in S\\u\in S'}\{d(A,u)+\omega(u,v)\}=4 d(A,S)=v∈Su∈S′min{d(A,u)+ω(u,v)}=4
其实从这里就可以看到Dijkstra的影子了,下面给出简单版本算法
目标:求给定点 u 0 u_0 u0到图中各点的最短距离(亦称单源最短路径)
1.初始化 S ′ = { u 0 } S'=\{u_0\} S′={u0},给定点集 S = P − S ′ S=P-S' S=P−S′,对于 S S S中的每一点 v v v,令 d ( u 0 , v ) = d ( u 0 , u 0 ) + ω ( u 0 , v ) d(u_0,v)=d(u_0,u_0)+\omega(u_0,v) d(u0,v)=d(u0,u0)+ω(u0,v)(显然这里的 u = u 0 u=u_0 u=u0)
2.找出 u 0 u_0 u0到 S S S的最短距离,并确定该点 u i u_i ui,即在S中找出一点 u i u_i ui使得 d ( u 0 , u i ) d(u_0,u_i) d(u0,ui)最小,用公式表示为
d ( u 0 , u i ) = min v ∈ S { d ( u 0 , v ) } d(u_0,u_i)=\min\limits_{v\in S}\{d(u_0,v)\} d(u0,ui)=v∈Smin{d(u0,v)}
3.若 S ≠ P S\neq P S=P,从给定点集S中删除 u i u_i ui,并将其加入到 S ′ S' S′中,用公式表示为 S = S − { u i } , S ′ = S ′ ∪ { u i } S=S-\{u_i\},S'=S'\cup\{u_i\} S=S−{ui},S′=S′∪{ui}
否则当 S = P S=P S=P时,则终止
4.对于新的S中的每一个点 v v v,重新计算 d ( u 0 , v ) = min u ∈ S ′ { d ( u 0 , u ) + ω ( u , v ) } d(u_0,v)=\min\limits_{u\in S'}\{d(u_0,u)+\omega(u,v)\} d(u0,v)=u∈S′min{d(u0,u)+ω(u,v)}
其实上面基本能用了,但是还有一些地方可以优化的
其一,对于二维数组 d ( u , v ) d(u,v) d(u,v)实际上我们只使用了 d ( u 0 , v ) d(u_0,v) d(u0,v),所以可以将它优化成一维数组 d ( v ) d(v) d(v)
再者,第4步,重新计算 d ( u 0 , v ) = min u ∈ S ′ { d ( u 0 , u ) + ω ( u , v ) } d(u_0,v)=\min\limits_{u\in S'}\{d(u_0,u)+\omega(u,v)\} d(u0,v)=u∈S′min{d(u0,u)+ω(u,v)}的时候有很多重复计算,让我们看看那里出来的重复计算?
当 S ′ = { u 0 , u 1 , . . . u i } S'=\{u_0,u_1,...u_i\} S′={u0,u1,...ui}时,
d ( u 0 , v ) = min u ∈ S ′ { d ( u 0 , u ) + ω ( u , v ) } = min { d ( u 0 , u 0 ) + ω ( u 0 , v ) , d ( u 0 , u 1 ) + ω ( u 1 , v ) , . . . , d ( u 0 , u i ) + ω ( u i , v ) } d(u_0,v)\\=\min\limits_{u\in S'}\{d(u_0,u)+\omega(u,v)\}\\=\min\{d(u_0,u_0)+\omega(u_0,v),d(u_0,u_1)+\omega(u_1,v),...,d(u_0,u_i)+\omega(u_i,v)\} d(u0,v)=u∈S′min{d(u0,u)+ω(u,v)}=min{d(u0,u0)+ω(u0,v),d(u0,u1)+ω(u1,v),...,d(u0,ui)+ω(ui,v)}
当 S ′ = { u 0 , u 1 , . . . u i , u i + 1 } S'=\{u_0,u_1,...u_i,u_{i+1}\} S′={u0,u1,...ui,ui+1}时,
d ( u 0 , v ) = min u ∈ S ′ { d ( u 0 , u ) + ω ( u , v ) } = min { d ( u 0 , u 0 ) + ω ( u 0 , v ) , d ( u 0 , u 1 ) + + ω ( u 1 , v ) . . . , d ( u 0 , u i ) + ω ( u i , v ) , d ( u 0 , u i + 1 ) + ω ( u i + 1 , v ) } d(u_0,v)\\=\min\limits_{u\in S'}\{d(u_0,u)+\omega(u,v)\}\\=\min\{d(u_0,u_0)+\omega(u_0,v),d(u_0,u_1)++\omega(u_1,v)...,d(u_0,u_i)+\omega(u_i,v),d(u_0,u_{i+1})+\omega(u_{i+1},v)\} d(u0,v)=u∈S′min{d(u0,u)+ω(u,v)}=min{d(u0,u0)+ω(u0,v),d(u0,u1)++ω(u1,v)...,d(u0,ui)+ω(ui,v),d(u0,ui+1)+ω(ui+1,v)}
我们可以发现,在计算S’= { u 0 , u 1 , . . . . u i + 1 } \{u_0,u_1,....u_{i+1}\} {u0,u1,....ui+1}最小值的时候,又计算了一遍在 { u 0 , u 1 , . . . . u i } \{u_0,u_1,....u_i\} {u0,u1,....ui}中的最小值,其实已经保存了 { u 0 , u 1 , . . . . u i } \{u_0,u_1,....u_i\} {u0,u1,....ui}的最小值,就直接和 u i u_i ui对应的值比较就行了。
就优化成这样
d ( u 0 , v ) = min u ∈ S ′ { d ( u 0 , u ) + ω ( u , v ) } = min { d ( u 0 , v ) , d ( u 0 , u i + 1 ) + ω ( u i + 1 , v ) } d(u_0,v)\\=\min\limits_{u\in S'}\{d(u_0,u)+\omega(u,v)\}\\=\min\{d(u_0,v),d(u_0,u_{i+1})+\omega(u_{i+1},v)\} d(u0,v)=u∈S′min{d(u0,u)+ω(u,v)}=min{d(u0,v),d(u0,ui+1)+ω(ui+1,v)}
结合前面两个优化,最后的Dijkstra算法如下
1.初始化 S ′ = { u 0 } S'=\{u_0\} S′={u0},给定点集 S = P − S ′ S=P-S' S=P−S′,对于 S S S中的每一点 v v v,令 d ( v ) = d ( u 0 ) + ω ( u 0 , v ) d(v)=d(u_0)+\omega(u_0,v) d(v)=d(u0)+ω(u0,v)(显然这里的 u = u 0 u=u_0 u=u0)
2.找出 u 0 u_0 u0到 S S S的最短距离,并确定该点 u i u_i ui,即在S中找出一点 u i u_i ui使得 d ( u i ) d(u_i) d(ui)最小,用公式表示为
d ( u i ) = min v ∈ S { d ( v ) } d(u_i)=\min\limits_{v\in S}\{d(v)\} d(ui)=v∈Smin{d(v)}
3.若 S ≠ P S\neq P S=P,从给定点集S中删除 u i u_i ui,并将其加入到 S ′ S' S′中,用公式表示为 S = S − { u i } , S ′ = S ′ ∪ { u i } S=S-\{u_i\},S'=S'\cup\{u_i\} S=S−{ui},S′=S′∪{ui}
否则当 S = P S=P S=P时,则终止
4.对于新的S中的每一个点 v v v,重新计算 d ( v ) = min u ∈ S ′ { d ( u ) + ω ( u , v ) } d(v)=\min\limits_{u\in S'}\{d(u)+\omega(u,v)\} d(v)=u∈S′min{d(u)+ω(u,v)}
当然其中 d ( u 0 ) = 0 d(u_0)=0 d(u0)=0,是可以省略的
关于证明:
证明这条路径时最小的,其实考虑三个方面(路径第一步进入S,路径最后一步进入S,路径中间某步进入S),简单放缩一下,具体参考课本















 2250
2250











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









