







C++大顶堆和小顶堆
原理
堆数据结构是一种数组对象,它可以被视为一颗完全二叉树结构(或者也有可能是满二叉树)
大顶堆
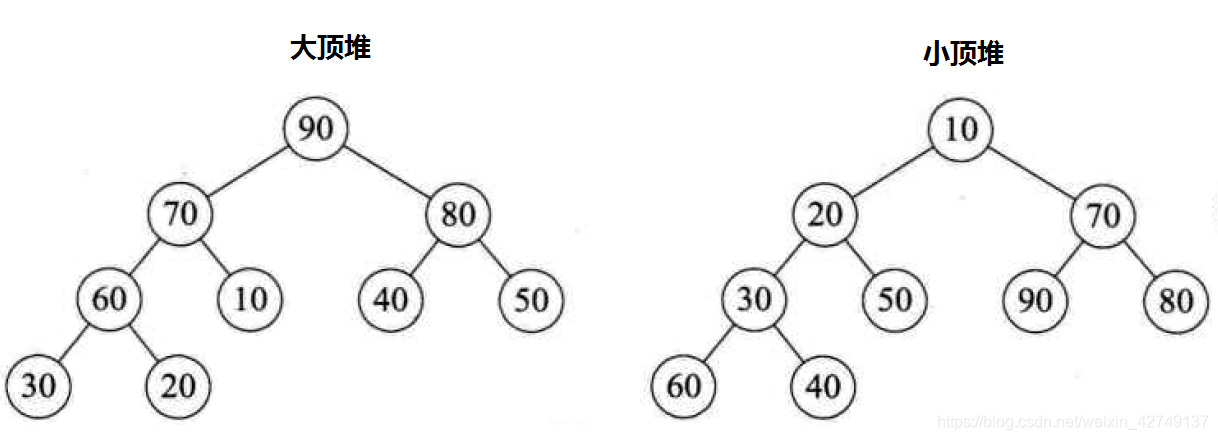
根结点(亦称为堆顶)的关键字是堆里所有结点关键字中最大者,称为大顶堆。大根堆要求根节点的关键字既大于或等于左子树的关键字值,又大于或等于右子树的关键字值。
小顶堆
根结点(亦称为堆顶)的关键字是堆里所有结点关键字中最小者,称为小顶堆。小根堆要求根节点的关键字既小于或等于左子树的关键字值,又小于或等于右子树的关键字值。
大顶堆和小顶堆对比图
大顶堆和小顶堆的实现代码
heap.h
#pragma once
#include<iostream>
#include<assert.h>
#include<vector>
using namespace std;
template<class T>
struct Less
{
bool operator()(const T& left, const T& right) const
{
return left < right;
}
};
template<class T>
struct Greater
{
bool operator()(const T& left, const T& right) const
{
return left > right;
}
};
template<class T, class Compare = Less<T>>
class Heap
{
public:
Heap()//无参的构造函数(系统不会给无参构造函数),开始堆是空的不需要做什么事
{}
Heap(T* a, size_t n)
{
_a.reserve(n);//开空间
for (size_t i = 0; i < n; ++i)
{
_a.push_back(a[i]);
}
//建堆,找最后一个非叶子节点
for (int i = (_a.size() - 2) / 2; i >= 0; --i)//不用size_t,因为i在这可能等于0,用size_t会死循环
{
AdjustDown(i);
}
}
//向下调整
void AdjustDown(int root)
{
Compare com;
int parent = root;
size_t child = parent * 2 + 1;//默认为左孩子
while (child < _a.size())
{
//选出小孩子
//if (child+1 > _a.size() && _a[child + 1]< _a[child])
if (child + 1 < _a.size() && com(_a[child + 1], _a[child]))
{
++child;
}
//if (_a[child] < _a[parent])
if (com(_a[child], _a[parent]))
{
swap(_a[child], _a[parent]);//交换值
parent = child;
child = parent * 2 + 1;
}
else
{
break;
}
}
}
//向上调整
void AdjustUp(int child)
{
Compare com;
int parent = (child - 1) / 2;
while (parent >= 0)
{
//if (_a[child] < _a[parent])
if (com(_a[child], _a[parent]))
{
swap(_a[parent], _a[child]);
child = parent;
parent = (child - 1) / 2;
}
else
{
break;
}
}
}
//最后插入
void Push(const T&x)
{
_a.push_back(x);
AdjustUp(_a.size() - 1);
}
//删除最大数
void Pop()
{
assert(!_a.empty());
swap(_a[0], _a[_a.size() - 1]);
_a.pop_back();
AdjustDown(0);
}
//取顶元素
T& Top()
{
assert(!_a.empty());
return _a[0];
}
size_t Size()
{
return _a.size();
}
bool Empty()
{
return _a.empty();
}
private:
vector<T> _a;
};
main.cpp
#include <iostream>
#include "heap.h"
using namespace std;
int main()
{
int a[] = { 10,11,13,12,16,18,15,17,14,19 };
// Heap<int,Greater<int>> hp1(a,sizeof(a)/sizeof(a[0])); 最大堆
// Heap<int,Less<int>> hp1(a,sizeof(a)/sizeof(a[0])); 最小堆
Heap<int> hp1(a, sizeof(a) / sizeof(a[0])); // 缺省,最小堆
hp1.Push(15);
system("pause");
return 0;
}
vector和push_heap、pop_heap实现堆
建堆
vector<int> nums = {9, 6, 2, 4, 7, 0, 1, 8, 3, 5};
如何使用nums构建最大堆
make_heap(nums.begin(), nums.end());
//或
make_heap(nums.begin(), nums.end(), less<int>());
如何使用nums构建最小堆
make_heap(nums.begin(), nums.end(), greater<int>());
调整堆
当使用上述的make_heap()建完堆后,如果vector使用push_back()插入数据或pop_back()删除数据后,会破坏最大堆/最小堆的性质,所以需要调整堆,常用push_heap()和pop_heap()两个方法。
1、push_heap()用法是,vector先push_back(),后push_heap()
nums.push_back(10);
push_heap(nums.begin(), nums.end(), less<int>());
2、pop_heap()用法是,先pop_heap(),vector后pop_back()
pop_heap(nums.begin(), nums.end(), less<int>());
nums.pop_back();
为什么pop_heap()的用法要反过来呢?
要从我们的目的来考虑,使用pop_heap()的绝大部分目的是要把堆顶元素pop出堆中,因为它最大或最小。如果先用vector的pop_back(),它删除的不是堆顶元素(nums[0]),而是vector的最后一个元素。可见这不是我们想要的结果:对于最大堆,最后一个元素既不是最大,也不一定是最小;对于最小堆,最后一个元素既不是最小,也不一定是最大。pop出来没有意义。
观察pop_heap()对堆做了什么?
pop_heap()把堆顶元素放到了最后一位,然后对它前面的数字重建了堆。这样一来只要再使用pop_back()把最后一位元素删除,就得到了新的堆。
priority_queue实现堆
priority_queue
对于这个模板类priority_queue,它是STL所提供的一个非常有效的容器。
作为队列的一个延伸,优先队列包含在头文件 中。
简述
优先队列时一种比较重要的数据结构,它是有二项队列编写而成的,可以以O(log n) 的效率查找一个队列中的最大值或者最小值,其中是最大值还是最小值是根据创建的优先队列的性质来决定的。
模板参数
优先队列有三个参数,其声明形式为:
priority_queue< type, container, function >
这三个参数,后面两个可以省略,第一个不可以。其中:
**type:**数据类型;
**container:**实现优先队列的底层容器;
**function:**元素之间的比较方式;
对于container,要求必须是数组形式实现的容器,例如vector、deque,而不能使list。
在STL中,默认情况下(不加后面两个参数)是以vector为容器,以 operator< 为比较方式,所以在只使用第一个参数时,优先队列默认是一个最大堆,每次输出的堆顶元素是此时堆中的最大元素。
成员函数
假设type类型为int,则:
- bool empty() const 返回值为true,说明队列为空;
- int size() const 返回优先队列中元素的数量;
- void pop() 删除队列顶部的元素,也即根节点;
- int top() 返回队列中的顶部元素,但不删除该元素;
- void push(int arg) 将元素arg插入到队列之中。
大顶堆和小顶堆
#include <functional>
//构造一个空的优先队列(此优先队列默认为大顶堆)
priority_queue<int> big_heap;
//另一种构建大顶堆的方法
priority_queue<int,vector<int>,less<int> > big_heap2;
//构造一个空的优先队列,此优先队列是一个小顶堆
priority_queue<int,vector<int>,greater<int> > small_heap;















 2523
2523











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









