







大家好,这里是【来一块葱花饼】,这次带来了目标跟踪的论文分享,与你分享~
之前做了一段时间的目标跟踪算法(以单目标跟踪SOT为主)的研究,学习了四十多篇顶会论文。所以,我新成立了专栏目标跟踪(SOT)|顶会论文|学习笔记,论文笔记与大家分享,方便大家快速了解目标跟踪的进展,掌握不同算法思想。欢迎大家讨论,在评论区写出自己的想法~
本文是CVPR-10篇(1)的目标跟踪论文笔记,与大家分享。具体论文分析笔记,见专栏中的其他文章,欢迎关注。。
具体论文分析笔记,见专栏中的其他文章,欢迎大家关注,链接如下:
目标跟踪|近三年|45篇顶会论文整理
目标跟踪|七大数据集|整理
目标跟踪|论文笔记分享|ICCV-6篇
目标跟踪|论文笔记分享|ICCV-2篇
目标跟踪|论文笔记分享|ECCV-6篇
目标跟踪|论文笔记分享|CVPR-12篇
目标跟踪|论文笔记分享|CVPR-10篇(1)
目标跟踪|论文笔记分享|CVPR-10篇(2)
文章目录
- 一.论文题目
- 二.主要思想
- 三.具体文章
- Siamese Box Adaptive Network for Visual Tracking
- SiamCAR: Siamese Fully Convolutional Classification and Regression for Visual Tracking
- Siam R-CNN: Visual Tracking by Re-Detection
- ROAM: Recurrently Optimizing Tracking Model
- Recursive Least-Squares Estimator-Aided Online Learning for Visual Tracking
- Probabilistic Regression for Visual Tracking
- One-shot Adversarial Attacks on Visual Tracking with Dual Attention
- Deformable Siamese Attention Networks for Visual Object Tracking
- Correlation-Guided Attention for Corner Detection Based Visual Tracking
- AutoTrack: Towards High-Performance Visual Tracking for UA V withAutomatic Spatio-Temporal Regularization
一.论文题目
| 论文题目 |
|---|
| SiamCAR: Siamese Fully Convolutional Classification and Regression for Visual Tracking |
| Siamese Box Adaptive Network for Visual Tracking |
| Deformable Siamese Attention Networks for Visual Object Tracking |
| Correlation-Guided Attention for Corner Detection Based Visual Tracking |
| Siam R-CNN: Visual Tracking by Re-Detection |
| Probabilistic Regression for Visual Tracking |
| Recursive Least-Squares Estimator-Aided Online Learning for Visual Tracking |
| ROAM: Recurrently Optimizing Tracking Model |
| One-Shot Adversarial Attacks on Visual Tracking With Dual Attention |
| AutoTrack: Towards High-Performance Visual Tracking for UAV With Automatic Spatio-Temporal |
二.主要思想
主要想法:anchor-free的想法,使用fcn进行分类和回归;逐像素提取特征、进行匹配;在线学习、动态模板;使用优化器处理目标形状变化问题;使用最小二乘法来进行模板更新;通过概率来约束跟踪;使用注意力机制;跟踪的对抗攻击;通过提高角点检测的准确性来提高框的精度;利用时空信息处理
三.具体文章
Siamese Box Adaptive Network for Visual Tracking
视觉跟踪的Siamese Box自适应网络
anchor-free的思想,使用fcn实现分类和回归
现有的跟踪器大多依赖于多尺度搜索方案或预定义的anchor来精确估计目标的尺度和宽高比。
不幸的是,它们通常需要繁琐的启发式配置。为了解决这个问题,我们提出了一个简单而有效的视觉跟踪框架(称为siamesebox自适应网络,SiamBAN),利用了全卷积网络(FCN)的表达能力。SiamBAN将视觉跟踪问题视为并行分类和回归问题,从而在统一的FCN中直接对对象进行分类并回归其边界盒。
无预先box设计避免了与候选box相关的超参数,使SiamBAN更加灵活和通用。
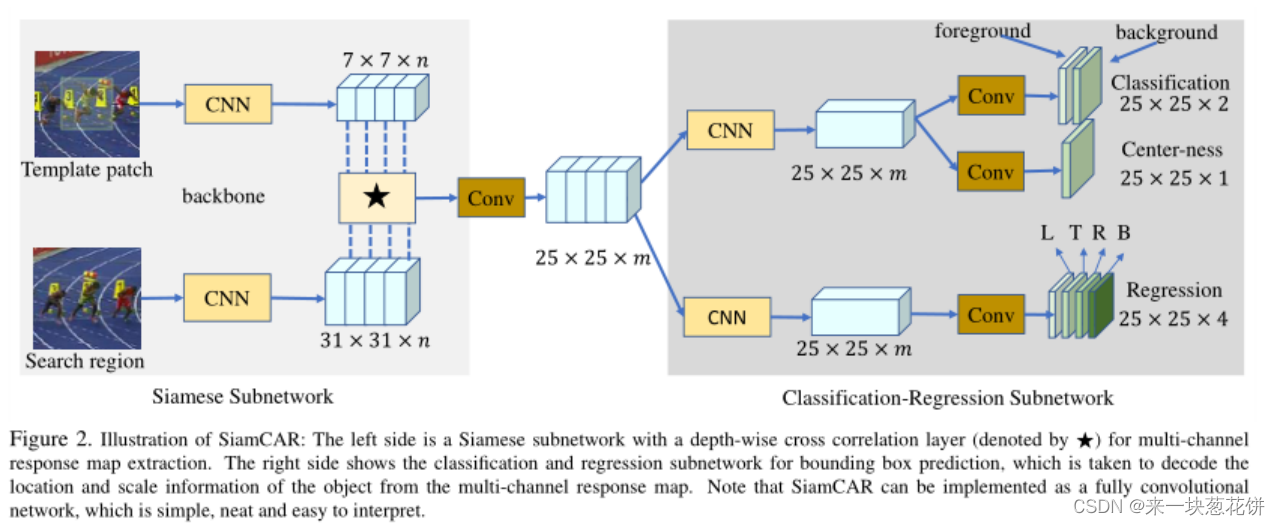
SiamCAR: Siamese Fully Convolutional Classification and Regression for Visual Tracking
SiamCAR:视觉跟踪的Siamese完全卷积分类和回归
anchor-free的思想,两个网络分别实现分类和回归
通过将视觉跟踪任务分解为像素类别分类和目标包围盒回归两个子问题,提出了一种新颖的全卷积Siamese网络,以逐像素方式解决端到端视觉跟踪问题。
该框架SiamCAR由两个简单的子网络组成:一个用于特征提取的Siamese子网络和一个用于边界盒预测的分类回归子网络。我们的框架以ResNet-50为骨干。与基于区域提议的Siamese-RPN、SiamRPN++和SPM等最先进的跟踪器不同,所提出的框架是使用候选框和 anchor free。因此,我们能够避免棘手的超参数调整锚,减少人为干预。提出的框架简单、简洁、有效。
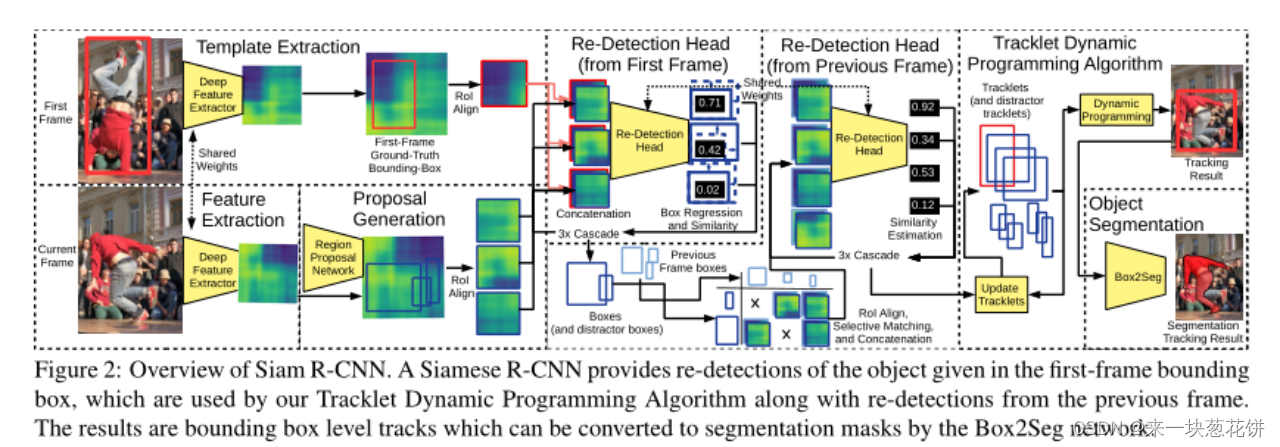
Siam R-CNN: Visual Tracking by Re-Detection
暹罗R-CNN:通过重新检测的视觉跟踪
使用两阶段检测的rcnn来进行跟踪,并且利用对第一帧模板和前一帧预测的重新检测,实际上现在更多的是使用在线更新模板,而不是一直使用第一帧的模板。
提出了暹罗R-CNN,一个暹罗重新检测架构**,释放了两阶段目标检测方法的全部力量,用于视觉目标跟踪**。
将此与一种新的基于轨迹的动态规划算法相结合,该算法利用对第一帧模板和前一帧预测的重新检测,来建模被跟踪对象和潜在干扰对象的完整历史。
这使得我们的方法能够做出更好的跟踪决策,以及在长时间遮挡后重新检测跟踪的对象。最后,我们提出了一种新的硬例子挖掘策略,以提高Siam R-CNN对相似外观对象的鲁棒性。Siam R-CNN在十个跟踪基准上取得了目前最好的表现,在长期跟踪方面效果特别好。
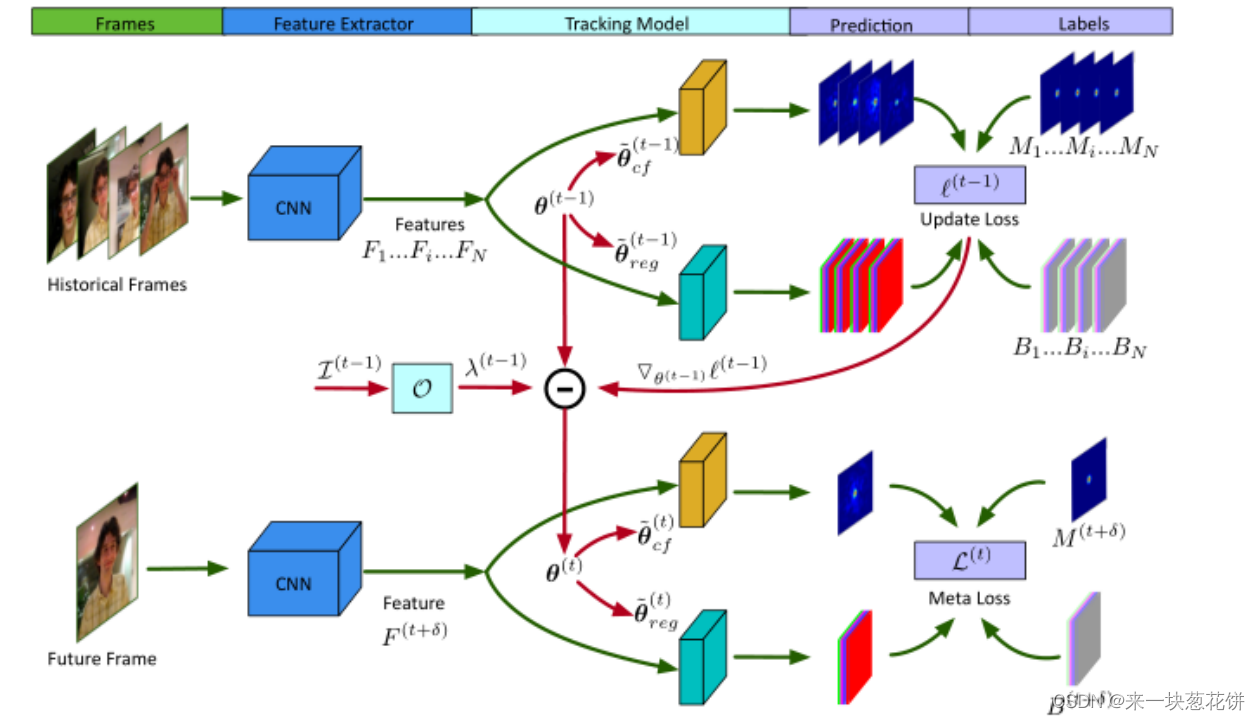
ROAM: Recurrently Optimizing Tracking Model
漫游:循环优化跟踪模型
本文是一个使用anchor的方法
亮点:1.使用了循环优化器来解决对象的外观变化问题。2.提出了一种由可调整大小的响应发生器和边界盒回归器组成的跟踪模型,在每个空间位置上只使用一个大小的锚,其对应的卷积滤波器可以通过双线性插值来适应形状的变化。
在本文中,我们设计一个跟踪模型组成的反应生成和边界框回归,第一个组件生成一个热图显示对象的出现在不同的位置,第二个组件回归相对边界盒移位到安装在滑动窗口位置的anchor。
由于在两个组件中使用了可调整大小的卷积过滤器来适应对象的形状变化,我们的跟踪模型不需要枚举不同大小的锚,从而保存模型参数。
为了有效地适应模型的外观变化,我们建议离线训练一个循环神经优化器来更新元学习设置中的跟踪模型,它可以在几个梯度步骤中收敛模型。这提高了跟踪模型更新的收敛速度。
Recursive Least-Squares Estimator-Aided Online Learning for Visual Tracking
递归最小二乘估计辅助在线学习的视觉跟踪
本文讨论了在线学习中不断更新模板带来的问题。然后提出使用递归最小二乘估计算法。
将各全连通层分别用LSE连接后,进一步提出了一种改进的小批量随机梯度下降算法,用于递归保持记忆的全连通网络学习。这种特性可以自发地降低过度在线学习中由于灾难性遗忘而导致的过度拟合风险
算是一种数学方法,来优化在线学习的模板更新问题。
Probabilistic Regression for Visual Tracking
视觉跟踪的概率回归
通过概率的角度,去计算输出的概率表示。此网络预测给定输入图像的目标状态的条件概率密度,能够对任务中不准确的注释和含糊不清的标签噪声进行建模。
通过最小化kl散度和优化标签分布(y|yi)来训练,该标签分布引入了模型标注噪声和任务歧义。
本文从数学的角度,通过进一步确定目标的概率,来优化结果。
感觉改进不大啊。。也就改进了一个点左右
One-shot Adversarial Attacks on Visual Tracking with Dual Attention
双注意视觉追踪的One-shot对抗性攻击
本文是针对跟踪算法的对抗攻击方法。
提出了一种基于暹罗网络的一次性攻击跟踪器的方法,只要干扰初始帧就能使跟踪器在视频中无法跟踪
提出了一个新的优化目标函数,该函数具有双重注意机制,以产生对抗性扰动,以确保一次攻击的效率
Deformable Siamese Attention Networks for Visual Object Tracking
视觉目标跟踪的可变形siamese注意力网络
使用注意力机制改进siamese算法
一方面强调学习强语境关系,一方面强调学习上下文关系
本文可以好好学习一下。

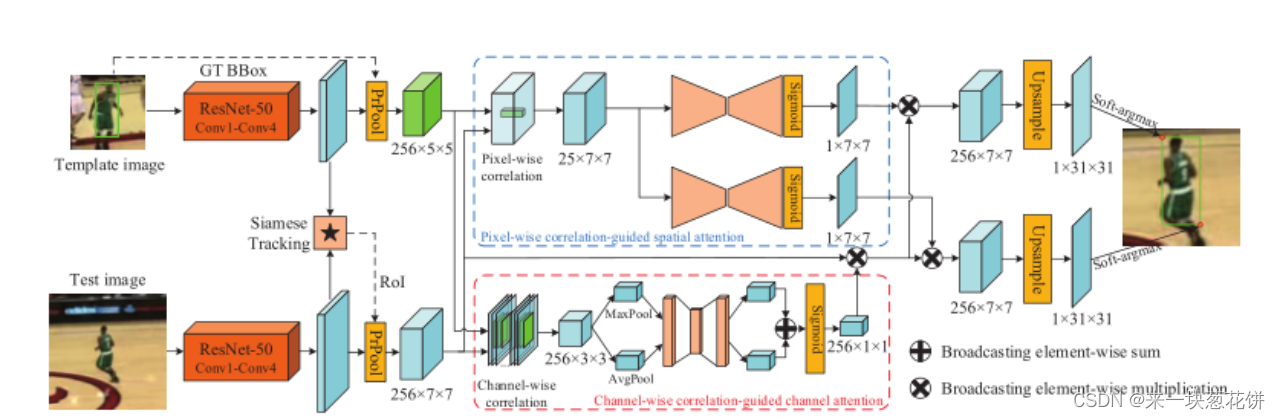
Correlation-Guided Attention for Corner Detection Based Visual Tracking
基于角点检测的视觉跟踪的相关引导注意
提出了一种提高角点检测的准确性、实现精确的bbox估计的跟踪算法,使用了注意力机制。
由于传统的多尺度搜索策略在许多涉及目标变化的挑战场景下无法估计紧密的bbox,因此精确的bbox估计近年来受到跟踪界的广泛关注。能够检测目标角点的跟踪器能够灵活地适应这种变化,但现有的基于角点检测的跟踪方法并没有取得足够的成功。
提出的方法的框架。首先从一个暹罗跟踪模块的结果构建RoI。然后通过两个PrPool层提取模板和RoI的特征。利用像素方向相关引导的空间注意模块和通道方向相关引导的通道注意模块来突出拐角区域并获得增强特征。然后对特征图进行上采样,得到两个角的热图。最后,利用两个软argmax函数计算角坐标
AutoTrack: Towards High-Performance Visual Tracking for UA V withAutomatic Spatio-Temporal Regularization
AutoTrack:面向自动时空正则化的高性能无人机视觉跟踪
从数学的角度,提出自适应的正则化方法,对于时空信息进行处理
现有的基于鉴别相关滤波器(DCF)的跟踪器大多试图通过引入预定义的正则化项来提高目标对象的学习,如抑制背景学习或限制相关滤波器的变化率等。
然而,预先设定的参数需要花费大量的精力来调整它们,并且它们仍然不能适应设计师没有想到的新情况。
之后我将在专栏目标跟踪(SOT)|顶会论文|学习笔记中,分享近三年的四十多篇顶会文章的详细笔记,方便大家快速入门。
感兴趣的同学点赞+收藏+关注,直接进入专栏进行学习~你们的支持就是我最大的动力~
感兴趣的同学点赞+收藏+关注,直接进入专栏进行学习~你们的支持就是我最大的动力~
感兴趣的同学点赞+收藏+关注,直接进入专栏进行学习~你们的支持就是我最大的动力~
















 6788
6788











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











