







 本文介绍了使用MATLAB计算克拉尼图形(Chladni Patterns)的方法,包括数值时域求解和理论求解。通过建立薄板振动方程,采用13点差分格式进行数值求解,并展示了不同频率下的振动结果。同时,讨论了简单的波动解,以及理论解中的二维驻波研究,提供了不同频率下的可能解组合。
本文介绍了使用MATLAB计算克拉尼图形(Chladni Patterns)的方法,包括数值时域求解和理论求解。通过建立薄板振动方程,采用13点差分格式进行数值求解,并展示了不同频率下的振动结果。同时,讨论了简单的波动解,以及理论解中的二维驻波研究,提供了不同频率下的可能解组合。
方形平板振动克拉尼图形可视化计算MATLAB程序(Chladni Patterns)
惯例声明:本人没有相关的工程应用经验,只是纯粹对相关算法感兴趣才写此博客。所以如果有错误,欢迎在评论区指正,不胜感激。本文主要关注于算法的实现,对于实际应用等问题本人没有任何经验,所以也不再涉及。
0前言
克拉尼图形(Chladni Patterns)是在1787年,由克拉尼首先发现并命名的。他将一个金属薄板中央固定,然后把细沙撒在金属板上,用小提琴摩擦边缘,板子上的细沙便会形成各种不同的图案。
相关的实验非常多,很多科技馆或者大学实验课或者网上视频大家也都接触过。具体原理也不难,就是每种频率下方板的振动模态是固定的,有的地方振动幅度大,有的地方振动幅度小,沙子在不断上下颠的过程中肯定会逐渐往振动小的地方汇集,于是就形成了克拉尼图形。
所以要想数值求解克拉尼图形,最重要的还是要求解出相应的振动方程才行。
本博客将求解方法分为3种,分别对应网上或者论文中常见的求解方式。相应文献这次就不放到前言了,放到后面每一章的开头。
下面的代码涉及到简单的数值分析基础,有些基础知识可能不会详细涉及。
1 数值时域求解
最近解微分方程比较上头,所以这里也顺手写了一个,效率比较低。
参考文献:
[1] 弹性力学(下册)(徐芝纶版) (第十四章:用差分法及变分法解薄板的小挠度弯曲问题)
[2] Abdeljaber O , Rjoub Y A . Free and forced vibration of rectangular plates using the finite difference method[C]// Green Building, Materials and Civil Engineering. 2014.
1.1 方程建立
根据常见的克拉尼图形实验来看,这属于弹性力学里的薄板小变形问题。
薄板静变形方程为:
∇ 4 u = ∂ 4 u ∂ x 4 + 2 ∂ 4 u ∂ x 2 ∂ y 2 + ∂ 4 u ∂ y 4 = 0 \nabla ^4u= \frac{\partial^4 u}{\partial x^4}+2\frac{\partial^4 u}{\partial x^2\partial y^2}+\frac{\partial^4 u}{\partial y^4}=0 ∇4u=∂x4∂4u+2∂x2∂y2∂4u+∂y4∂4u=0
其中u为薄板变形位移。当然,本文只考虑垂直于平板表面的位移,其余位移忽略。
再考虑运动,还需要引入时间t和加速度对应的量,方程变为:
∇ 4 u + ρ h D ∂ 2 u ∂ t 2 = 0 \nabla ^4u+\frac{\rho h}{D} \frac{\partial^2 u}{\partial t^2}= 0 ∇4u+Dρh∂t2∂2u=0
其中 D = E h 3 / 12 ( 1 − μ ) 2 D=Eh^3 /12(1-\mu)^2 D=Eh3/12(1−μ)2,E为平板材料的弹性模量,μ为材料的泊松比,ρ为材料的密度,这都是材料属性。h为薄板的厚度。
平板位置为在xy平面的[-L,L]区间上,四周为自由边界条件。
平板中心(0,0)点的位置为固定边界条件,中间固定点位移为已知的余弦函数振动。
为简化计算量,后面1.2节将平板沿x轴和y轴裁剪为1/4对称的小方形,中间设置为对称边界条件。

这种1/4模型简化有一定的问题,比如当平板做非对称振动时就无法模拟,而且Chladni图形的实验中也观察到这种图形。这个在后面第2章和第3章会涉及。
1.2 数值差分方程建立
首先 ∇ 4 u \nabla ^4u ∇4u,我们直接采用下面的差分格式:
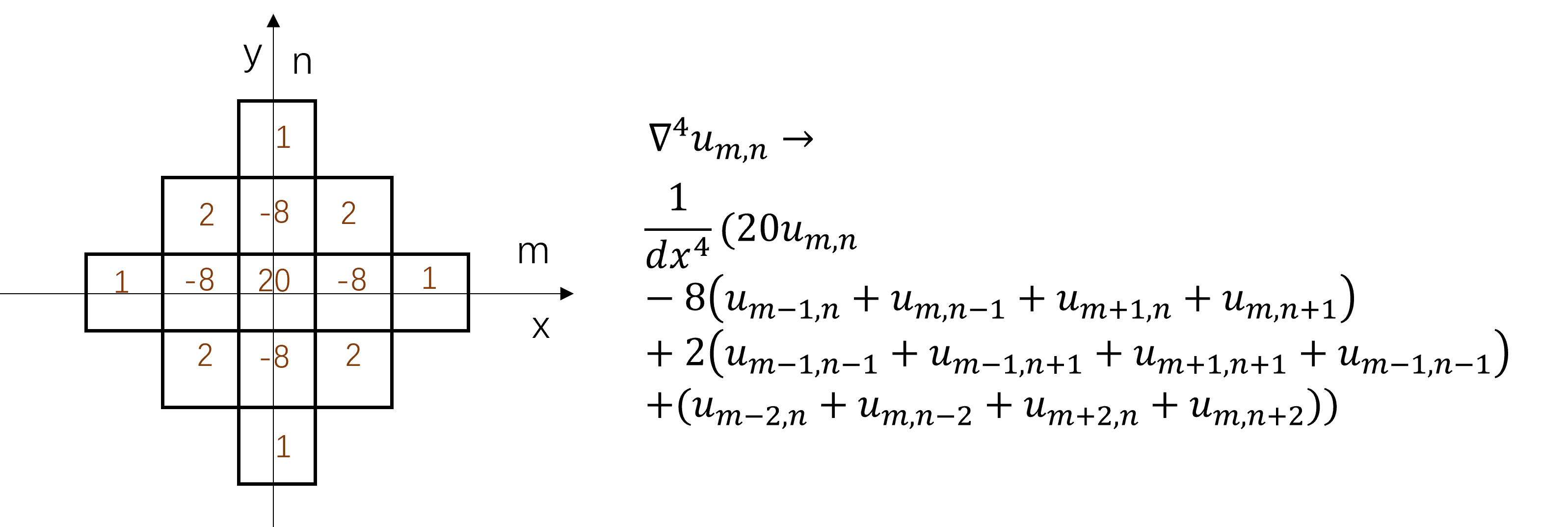
这里假设dx和dy方向的网格尺寸相同。当然,上面的表达式也并非唯一,这种13点差分格式的优点为结构比较紧凑,用到的点比较少,其余格式也可以自行泰勒展开凑一凑。
时间项由于只有二阶,所以更简单一些:
∂ 2 u ∂ t 2 → u t − 2 − 2 u t − 1 + u t d t 2 \frac{\partial^2 u}{\partial t^2} \to \frac{u_{t-2}-2u_{t-1}+u_{t}}{dt^2} ∂t2∂2u→dt2ut−2−2ut−1+ut
之后将上面所有单元的对应的差分方程列出后,将显示时间格式项加入方程中,然后联立这些方程组得到当前时刻的空间u。每个单元格点的方程u表示如下:
( 20 + ρ h D d x 4 d t 2 ) u m , n , t − 8 ( u m − 1 , n , t + u m + 1 , n , t + u m , n − 1 , t + u m , n + 1 , t ) (20+\frac{\rho h}{D}\frac{dx^4}{dt^2})u_{m,n,t} -8(u_{m-1,n,t}+u_{m+1,n,t}+u_{m,n-1,t}+u_{m,n+1,t}) (20+Dρhdt2dx4)um,n,t−8(um−1,n,t+um+1,n,t+um,n−1,t+um,n+1,t)
+ 2 ( u m − 1 , n − 1 , t + u m − 1 , n + 1 , t + u m + 1 , n + 1 , t + u m + 1 , n − 1 , t ) +2(u_{m-1,n-1,t}+u_{m-1,n+1,t}+u_{m+1,n+1,t}+u_{m+1,n-1,t}) +2(um−1,n−1,t+um−1,n+1,t+um+1,n+1,t+um+1,n−1,t)
+ ( u m − 2 , n , t + u m + 2 , n , t + u m , n − 2 , t + u m , n + 2 , t ) +(u_{m-2,n,t}+u_{m+2,n,t}+u_{m,n-2,t}+u_{m,n+2,t}) +(um−2,n,t+u
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1198
1198

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









