






🧠 从HW4主板拆解,看特斯拉在以太网上的野心
🚗 开局一句话:
“特斯拉的下一场战争,不在电池,不在自动驾驶,而是在以太网上。”
💥 HW4再曝光,Realtek露头,故事变味了
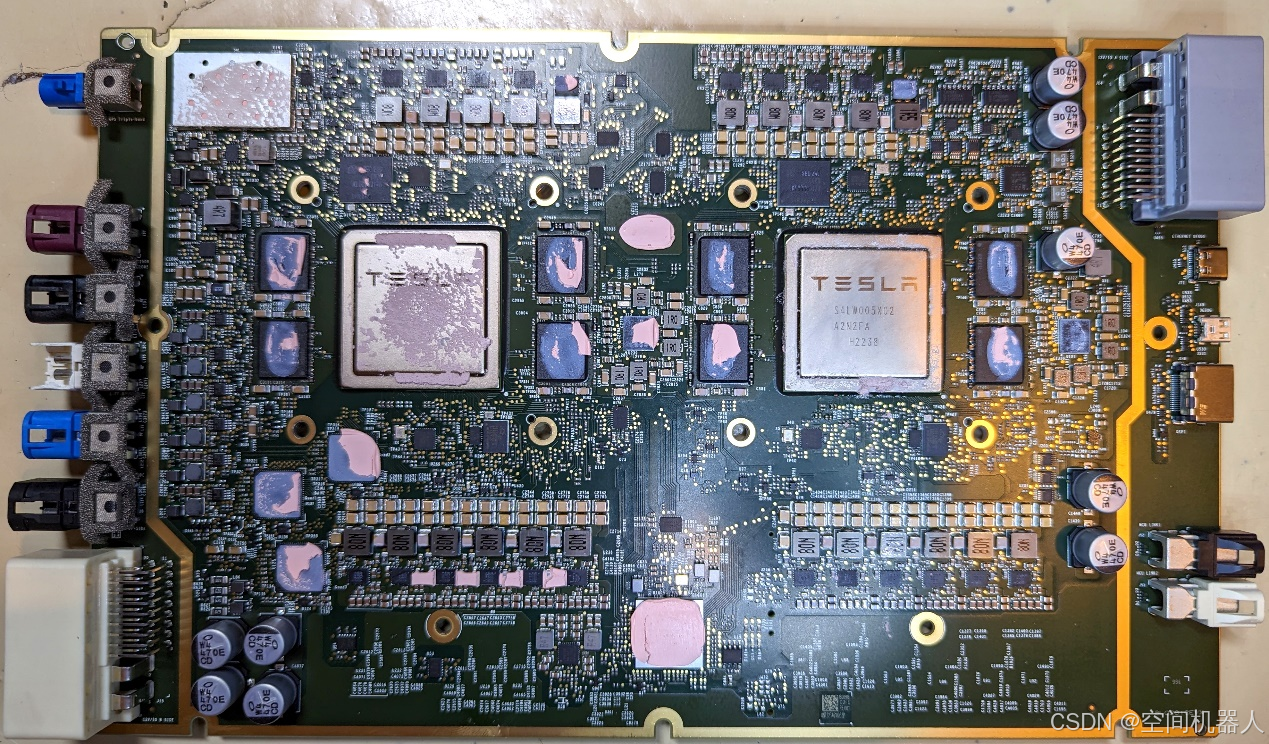
新版HW4主板曝光了个底朝天。硬件老粉都疯了,毕竟这一次——Realtek RTL9071LC交换机首次出现在特斯拉主板上。
什么意思?,就是特斯拉把车内通信从传统CAN/CAN-FD往以太网方向开了第一枪,而且不是以前那种一两个10Gbps的“点到点高速链路”,而是支持 10BASE-T1S 的交换式架构。
🚨 关键词:10BASE-T1S
这是IEEE新出的车规以太网标准,支持 多主机接入,总线型拓扑,带宽10Mbps,单对线。
翻译过来就是:低成本、多节点、软总线替代CAN的新希望。
🎯 不是换个芯片这么简单,是整个主板架构在进化
🔍我们来做点CT级别的“拆解分析”:
| 位置 | 芯片型号 | 功能 | 变化点 |
|---|---|---|---|
| 中心处理器 | S4LW005A02P / A0T | Tesla自研FSD SoC | 与HW3的S4LW005X02不同,推测为新代次或降功耗变体 |
| 显存 | Micron D8GLS (MT61M512M32KPA-12AAT:E) | 512M x 32 GDDR6 | 从14Gbps降至12Gbps,但通过车规认证 |
| 电源部分 | 多相供电模块 | 为SoC、GPU、内存供电 | 从22相降至16相,功耗控制明显 |
| 网口管理 | Realtek RTL9071LC | T1S交换机 | 确认进入SoA以太网架构,史无前例 |
🎙️ 如果你搞过板子,就知道这些变化有多扎实。不是“挤牙膏”式微创新,是换血级别的架构迁移。
🧱 构建以太网为核心的下一代EE架构,特斯拉已在路上
你以为特斯拉一直靠CAN在跑FSD?你太天真了。HW3之后,车内通信带宽早就卡脖子。
🔌 Radar、Camera、Ultrasonic,感知端越来越多;
🧠 计算单元越来越卷,数据要拉满;
📡 OTA要求高,诊断要实时,控制要多源融合……
📦 CAN已经扛不住了,于是:
- HW4直接上 车规级以太网交换芯片;
- 以太网主干,CAN做Backup;
- 每个Camera也许未来就是一个T1S节点;
- 再往后?连Sensor都能跑IP协议。
是的,特斯拉走得最早,最激进。
⚙️ SoA不是嘴炮,是可以上车的以太网方案
你可以把这块HW4板子当成SoA(面向服务架构)的预演。它不再是传统控制器+CAN总线+集中冗余那套,而是:
✅ 分布式节点(Camera/Radar)直接挂以太网
✅ 中央计算节点通过交换芯片统一通信
✅ 不同ECU可以服务注册 + 数据发布(Pub/Sub)
🚗 一句话:“整车成了一台动态分布的局域网。”
🧠 技术很香,难点也不少
别光激动,也别觉得HW4就是终点,它还只是SoA的“Baby step”。
以下是大家想踩的坑,特斯拉已经下水:
| 挑战 | 说明 |
|---|---|
| 以太网EMC问题 | T1S频率低,但总线长,多节点引发EMC难题 |
| 功耗控制 | SoC温控、待机管理、交换芯片功耗是工程难点 |
| 软件架构 | DDS?SOME/IP?ROS2?各家选择未统一 |
| 网络安全 | ECU服务注册 = 新攻击面,整车网络防火墙刚起步 |
🧩 小结:HW4 ≠ 只是算力升级,而是整车通信架构的重大拐点
特斯拉这块板子藏了太多信息,拆掉的不只是芯片,是整个汽车通信时代的边界。
HW3 是“单点智能”,HW4 是“网络智能”。
从计算模块中心化,到通信架构网络化,再到服务化控制架构普及化,
特斯拉在用主板改写整车架构。
📌 彩蛋:如果你也关注HW5,请记住——
HW4用T1S打通车内互联,HW5可能就要让“Ethernet直控执行器”变成现实。
到那时,车内没有CAN,没有LIN,只有以太网的世界。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











