









 本文深入解析了PID算法的工作原理,包括比例、积分、微分三个环节的作用与副作用,并提供了详细的代码实现,涵盖基本PID与增量型PID算法,适合初学者理解和应用。
本文深入解析了PID算法的工作原理,包括比例、积分、微分三个环节的作用与副作用,并提供了详细的代码实现,涵盖基本PID与增量型PID算法,适合初学者理解和应用。
RAM与ROM
内存:RAM SRAM
硬盘:ROM FLASH
flash 分为:NOR FLASH 和NAND FLASH
NOR FLASH读取速度快于 NAND FLASH
NAND FLASH写入速度快于 NOR FLASH
二者 由其寻址特点决定。
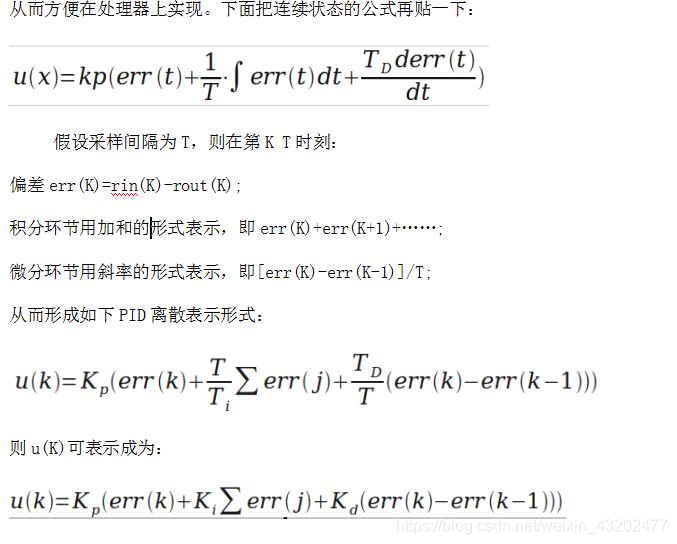
PID算法
程序实现:
第一步:定义PID变量结构体,代码如下:
struct _pid{
float SetSpeed; //定义设定值
float ActualSpeed; //定义实际值
float err; //定义偏差值
float err_last; //定义上一个偏差值
float Kp,Ki,Kd; //定义比例、积分、微分系数
float voltage; //定义电压值(控制执行器的变量)
float integral; //定义积分值
}pid;
控制算法中所需要用到的参数在一个结构体中统一定义,方便后面的使用。
第二部:初始化变量,代码如下:
void PID_init(){
printf("PID_init begin \n");
pid.SetSpeed=0.0;
pid.ActualSpeed=0.0;
pid.err=0.0;
pid.err_last=0.0;
pid.voltage=0.0;
pid.integral=0.0;
pid.Kp=0.2;
pid.Ki=0.015;
pid.Kd=0.2;
printf("PID_init end \n");
}
统一初始化变量,尤其是Kp,Ki,Kd三个参数,调试过程当中,对于要求的控制效果,可以通过调节这三个量直接进行调节。
第三步:编写控制算法,代码如下:
float PID_realize(float speed){
pid.SetSpeed=speed;
pid.err=pid.SetSpeed-pid.ActualSpeed;
pid.integral+=pid.err;
pid.voltage=pid.Kp*pid.err+pid.Ki*pid.integral+pid.Kd*(pid.err-pid.err_last);
pid.err_last=pid.err;
pid.ActualSpeed=pid.voltage*1.0;
return pid.ActualSpeed;
}
注意:这里用了最基本的算法实现形式,没有考虑死区问题,没有设定上下限,只是对公式的一种直接的实现,后面的介绍当中还会逐渐的对此改进。
到此为止,PID的基本实现部分就初步完成了。下面是测试代码:
int main(){
printf("System begin \n");
PID_init();
int count=0;
while(count<1000)
{
float speed=PID_realize(200.0);
printf("%f\n",speed);
count++;
}
return 0;
}
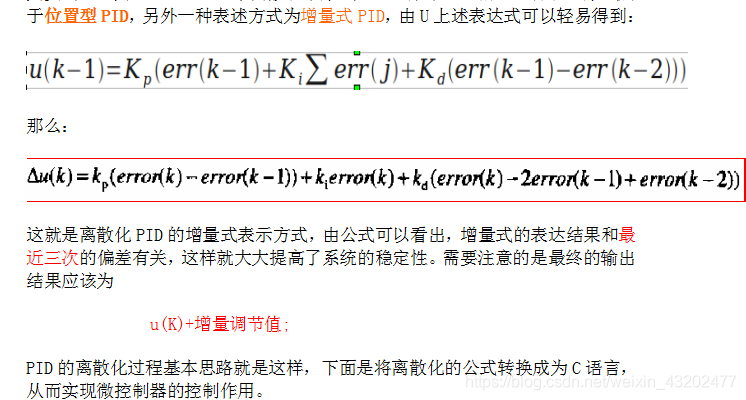
增量型
代码实现:
#include<stdio.h>
#include<stdlib.h>
struct _pid{
float SetSpeed; //定义设定值
float ActualSpeed; //定义实际值
float err; //定义偏差值
float err_next; //定义上一个偏差值
float err_last; //定义最上前的偏差值
float Kp,Ki,Kd; //定义比例、积分、微分系数
}pid;
void PID_init(){
pid.SetSpeed=0.0;
pid.ActualSpeed=0.0;
pid.err=0.0;
pid.err_last=0.0;
pid.err_next=0.0;
pid.Kp=0.2;
pid.Ki=0.015;
pid.Kd=0.2;
}
float PID_realize(float speed){
pid.SetSpeed=speed;
pid.err=pid.SetSpeed-pid.ActualSpeed;
float incrementSpeed=pid.Kp*(pid.err-pid.err_next)+pid.Ki*pid.err+pid.Kd*(pid.err-2*pid.err_next+pid.err_last);
pid.ActualSpeed+=incrementSpeed;
pid.err_last=pid.err_next;
pid.err_next=pid.err;
return pid.ActualSpeed;
}
int main(){
PID_init();
int count=0;
while(count<1000)
{
float speed=PID_realize(200.0);
printf("%f\n",speed);
count++;
}
return 0;
}
PID算法经验
1.比例系数Kp的作用是加快系统的响应速度,提高系统的调节精度。Kp越大,系统的响应速度越快,系统的调节精度越高,但是容易产生超调,甚至会使系统不稳定。Kp取值过小,则会降低调节精度,使响应速度缓慢,从而延长调节时间,是系统静态、动态特性变差;
2.积分作用系数Ki的作用是消除系统的稳态误差。Ki越大,系统的静态误差消除的越快,但是Ki过大,在响应过程的初期会产生积分饱和的现象,从而引起响应过程的较大超调。若Ki过小,将使系统静态误差难以消除,影响系统的调节精度;
3.微分系数Kd的作用是改善系统的动态特性,其作用主要是在响应过程中抑制偏差向任何方向的变化,对偏差变化进行提前预报。但是kd过大,会使响应过程提前制动,从而延长调节时间,而且会降低系统的抗干扰性。
我们从作用和副作用两个方面说明参数对系统的影响。
1.比例环节Kp,作用是加快系统的响应速度,提高系统的调节精度,副作用是会导致超调;
2.积分环节Ki,作用是消除稳态误差,副作用是导致积分饱和现象;
3.微分环节Kd,作用是改善系统的动态性能,副作用是延长系统的调节时间。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









