









RNN
一、RNN
1、场景引入
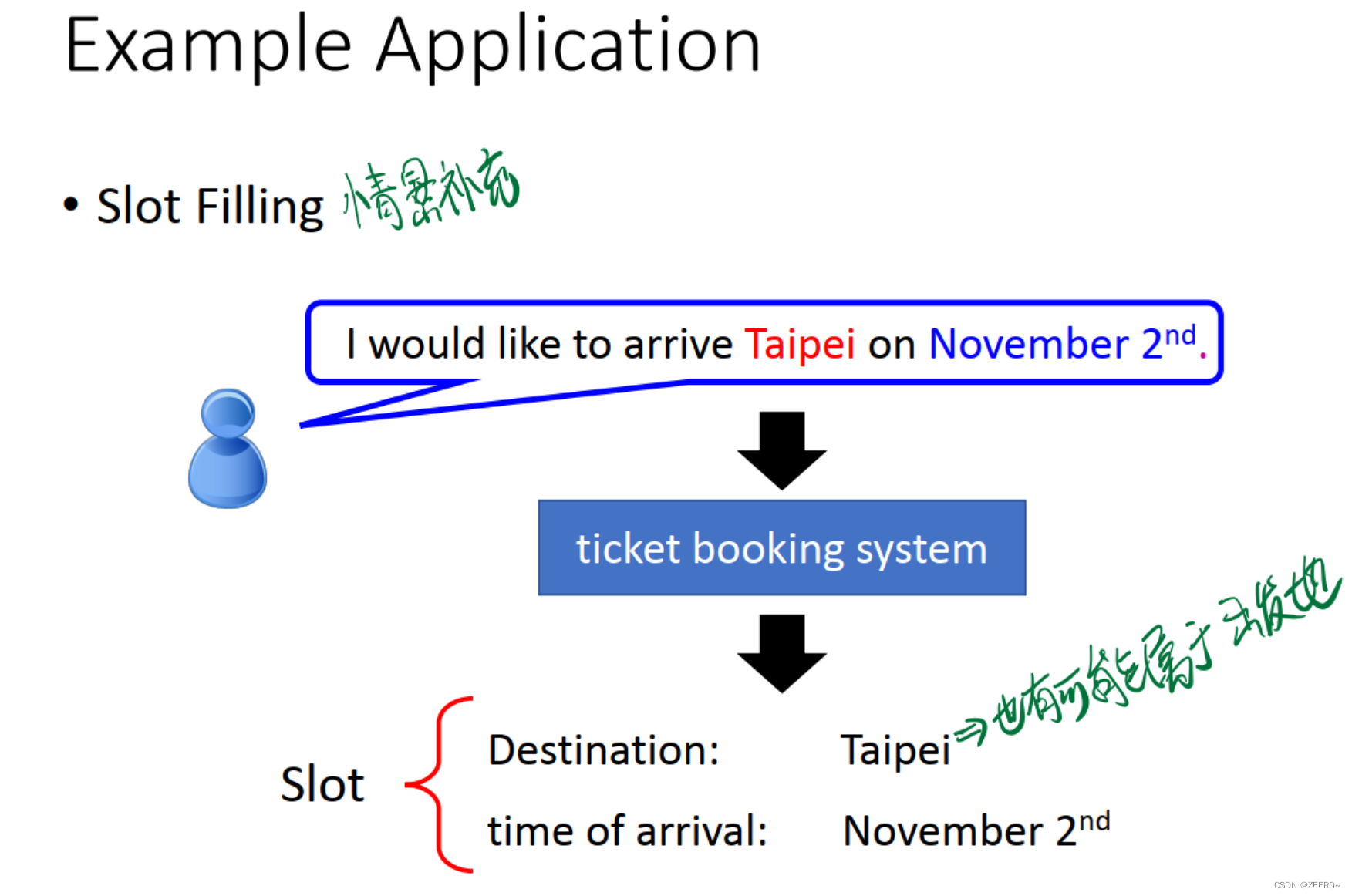
例如情景补充的情况,根据词汇预测该词汇所属的类别。这个时候的Taipi则属于目的地。但是,在订票系统中,Taipi也可能会属于出发地。到底属于目的地,还是出发地,如果不结合上下文,则很难做出判断。因此,使用传统的深度神经网络解决不了问题,必须引入RNN。
2、如何将一个单词表示成一个向量
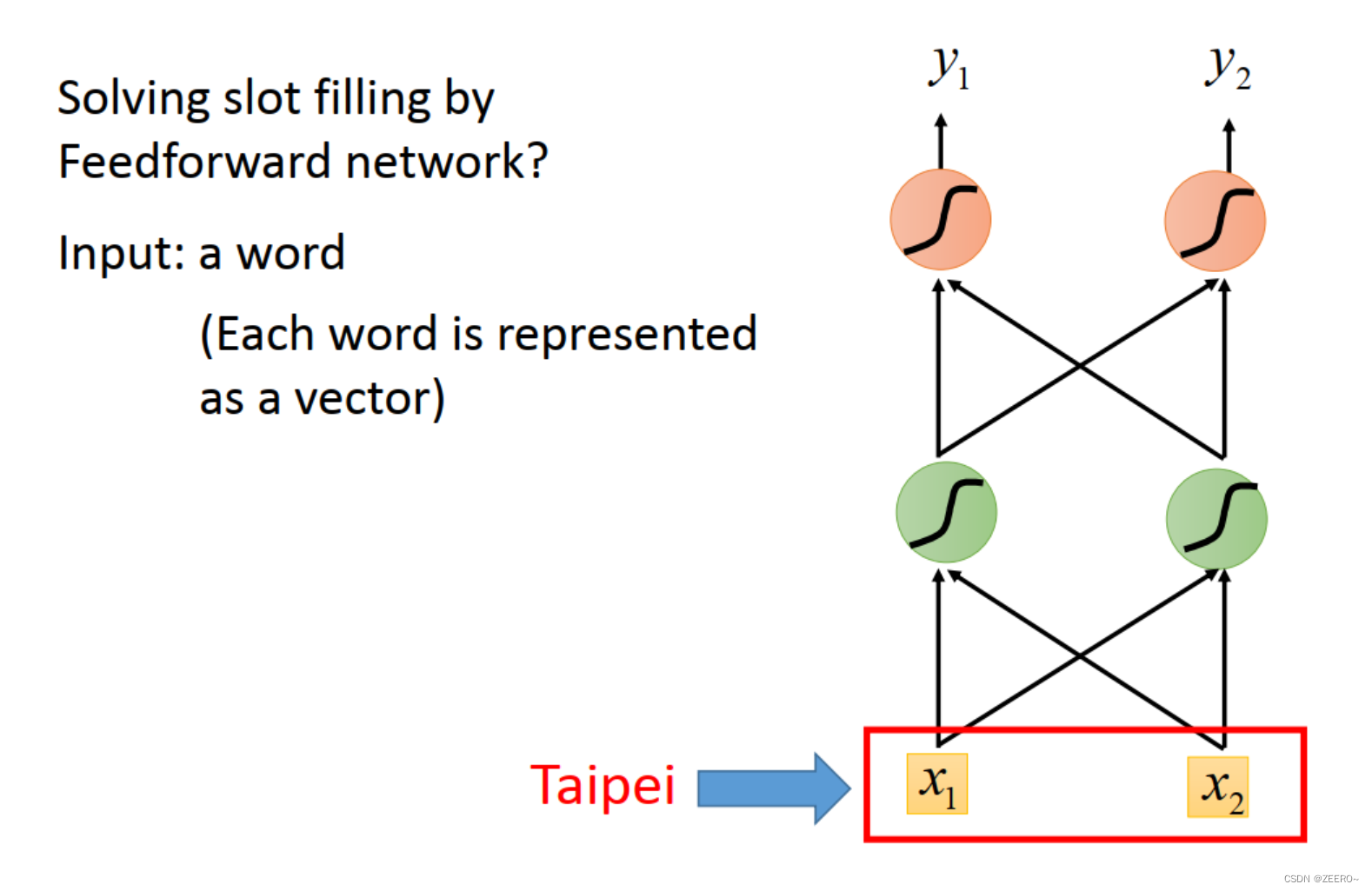
如上图所示,将词汇Taipi表示成[x1,x2]组成的向量。
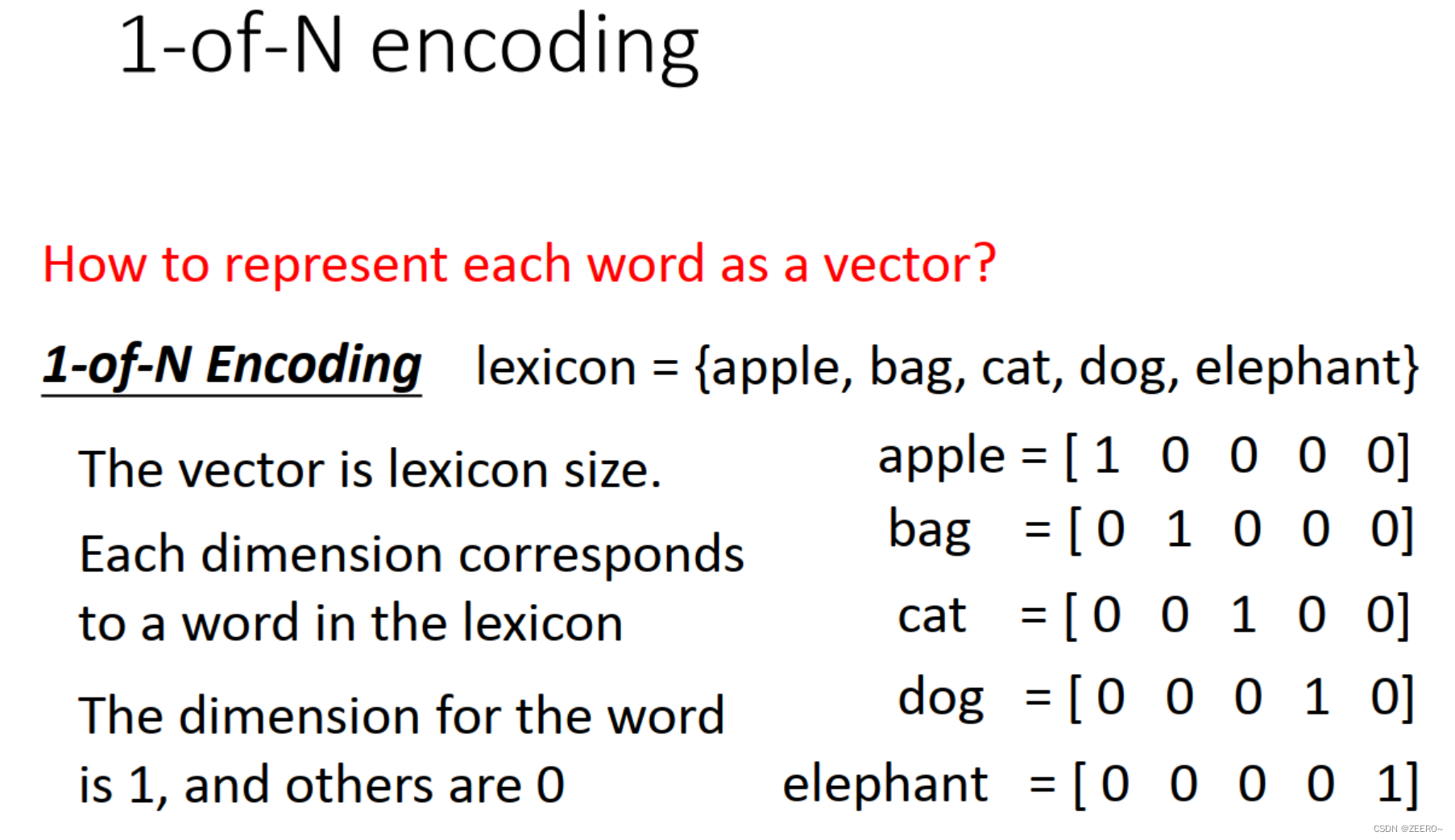
一个最简单的方法是1-N encoding。思路是将所有的可能用到的词汇组成一个词典,然后假如我们一共只可能用到5个单词,则如上图所示,每个单词可以用1个五维向量来表示。
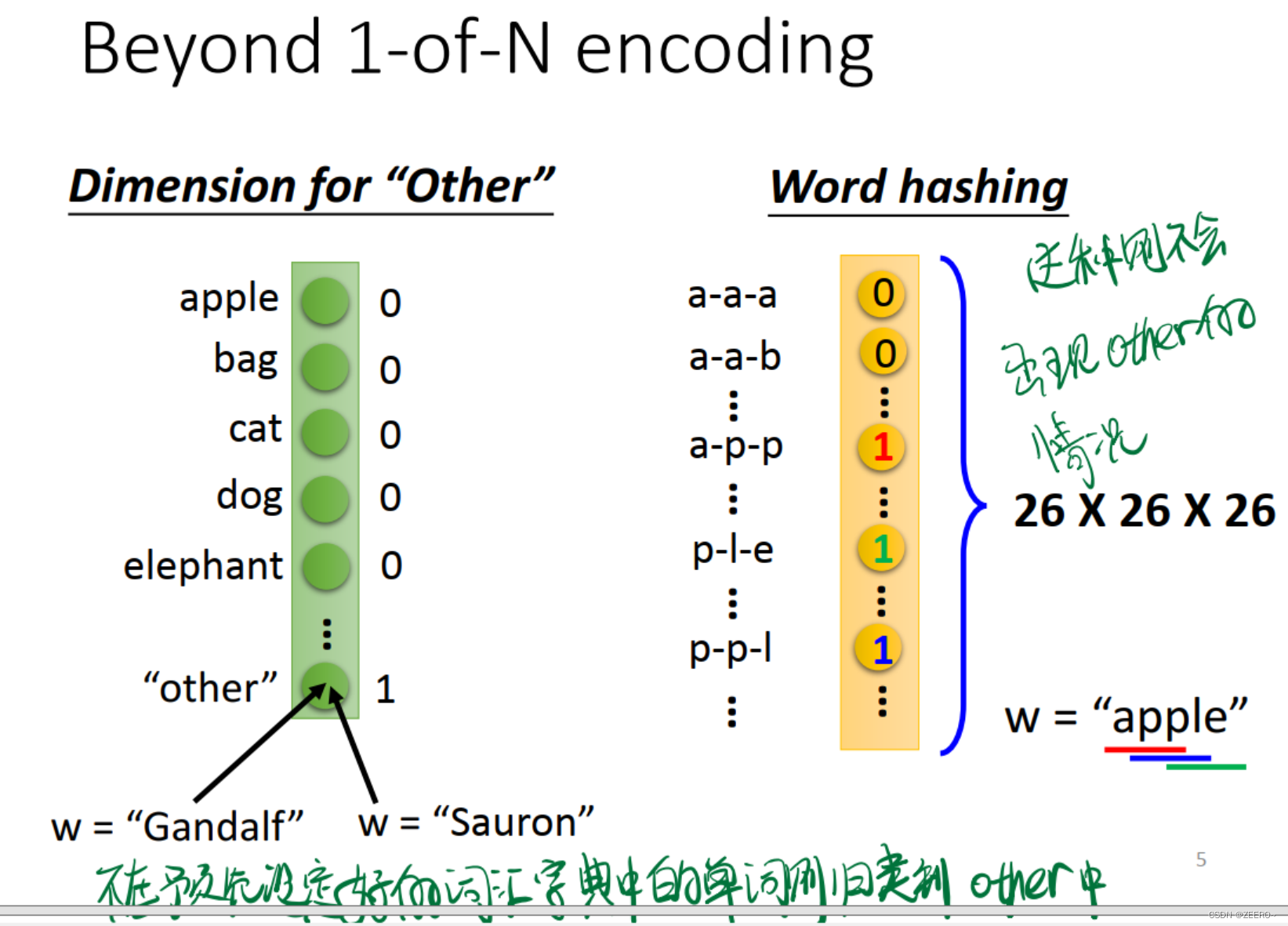
除了1-N econding之外,还有一些其他的方法。
第一种思路是设置1个other选项,将所有没有预先在词典中所设定的单词表示成other。
第二种思路是利用26个字母进行hash映射。这种情况下则不需要额外考虑other的情况。
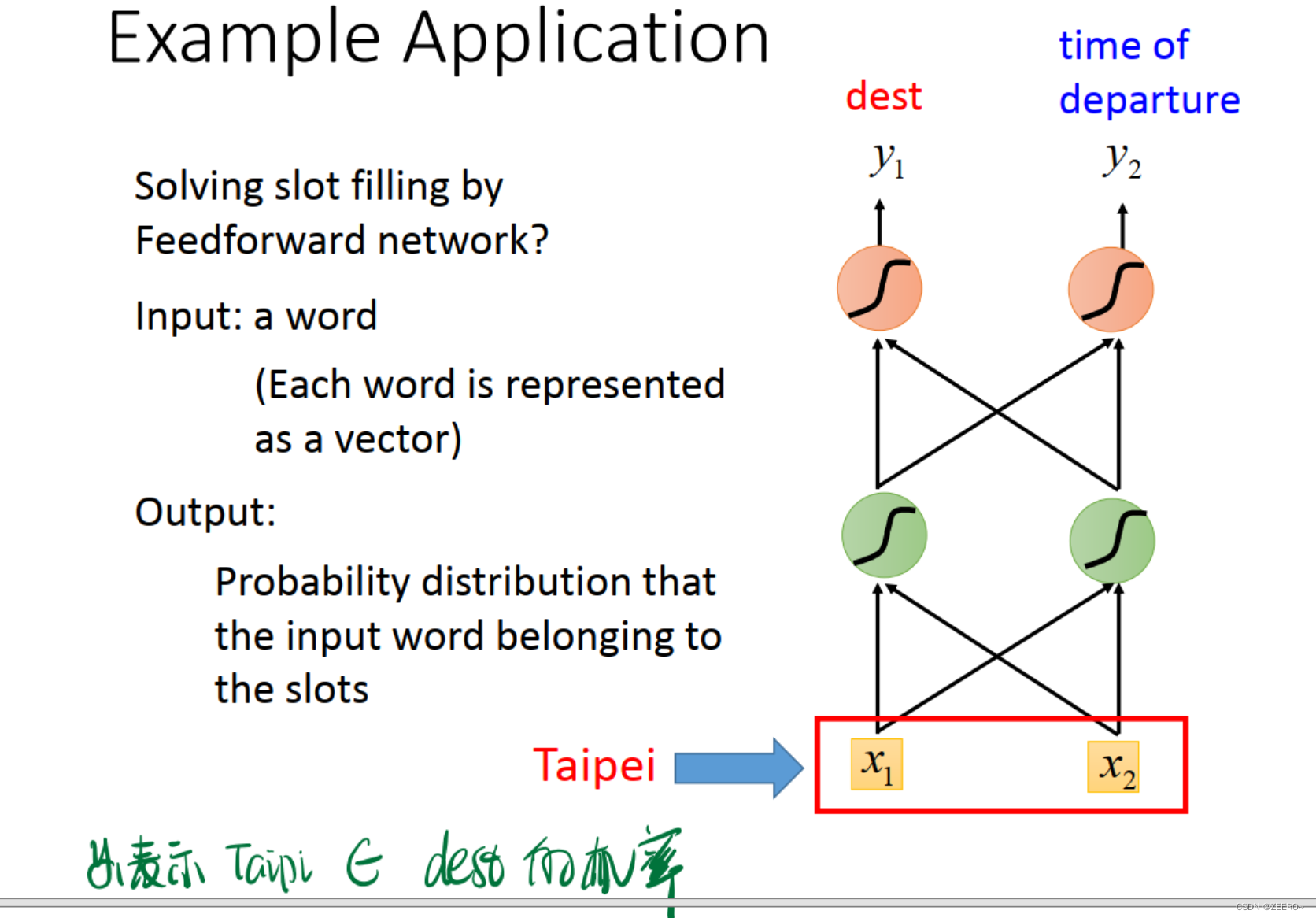
这样,将词汇向量化之后,我们指导,网络的输入为一个个的词汇向量,网络的输出则为:y1表示词汇属于dest目的地的概率,y2则表示词汇属于出发地的概率。最后其实应该还有一层,做出预测,属于哪个概率最大,则输出哪个。
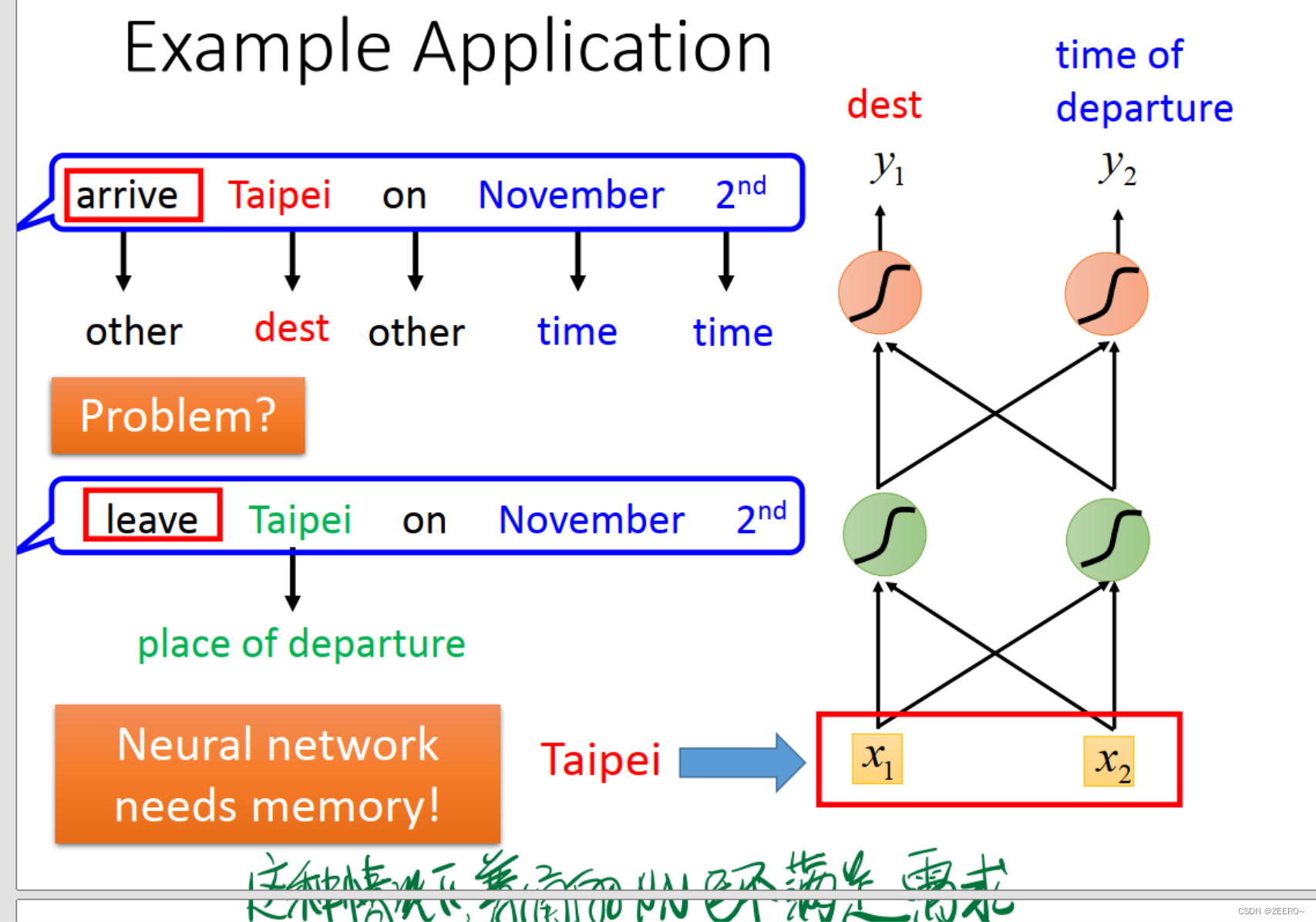
这个时候,我们所构建的NN则是需要有记忆的,否则无法解决该问题。
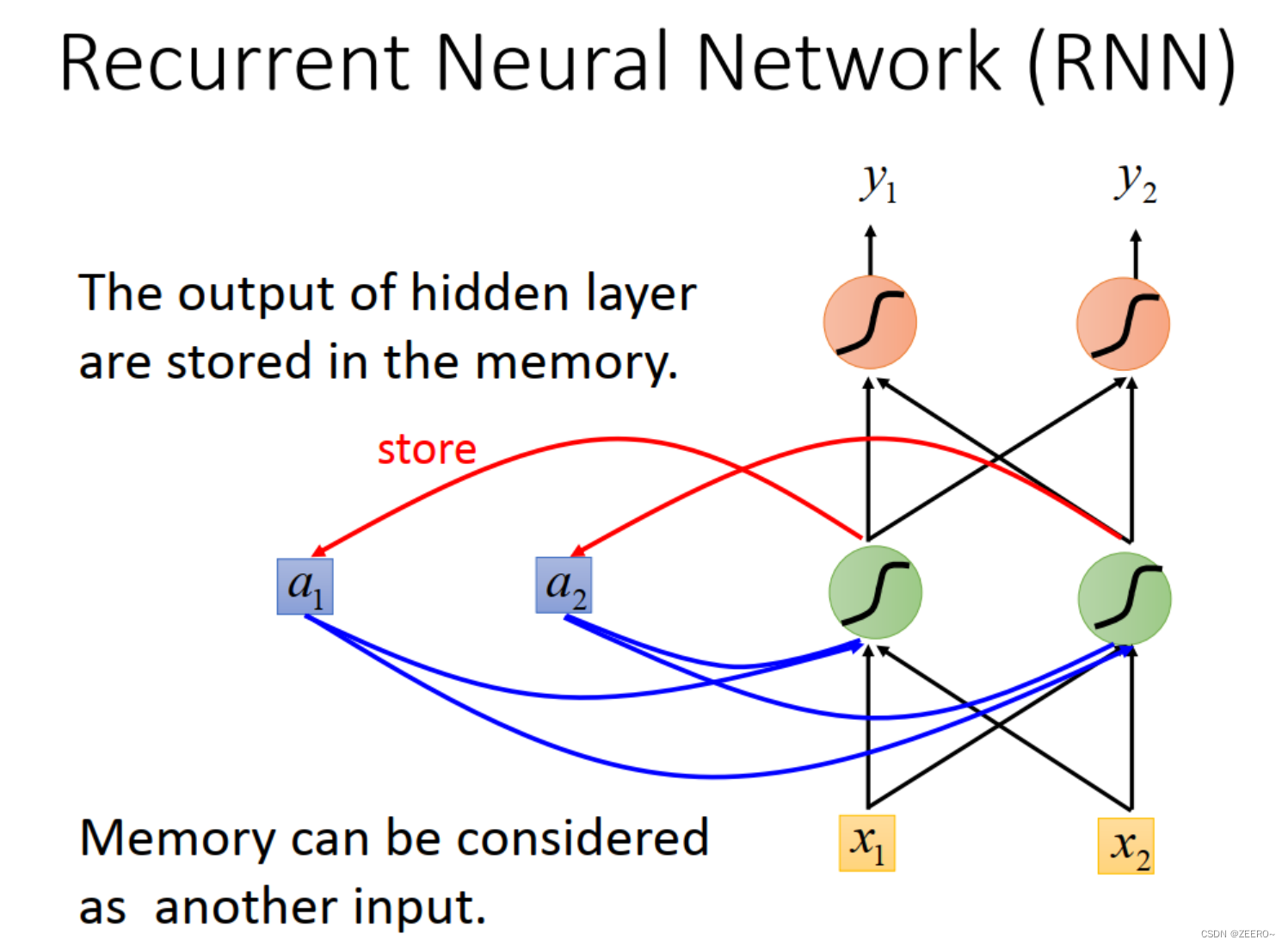
因此,我们引入了RNN来解决该问题。将每次hidden layer的输出先储存到memory cell中,作为下个词汇向量的输入。不断循环该过程。
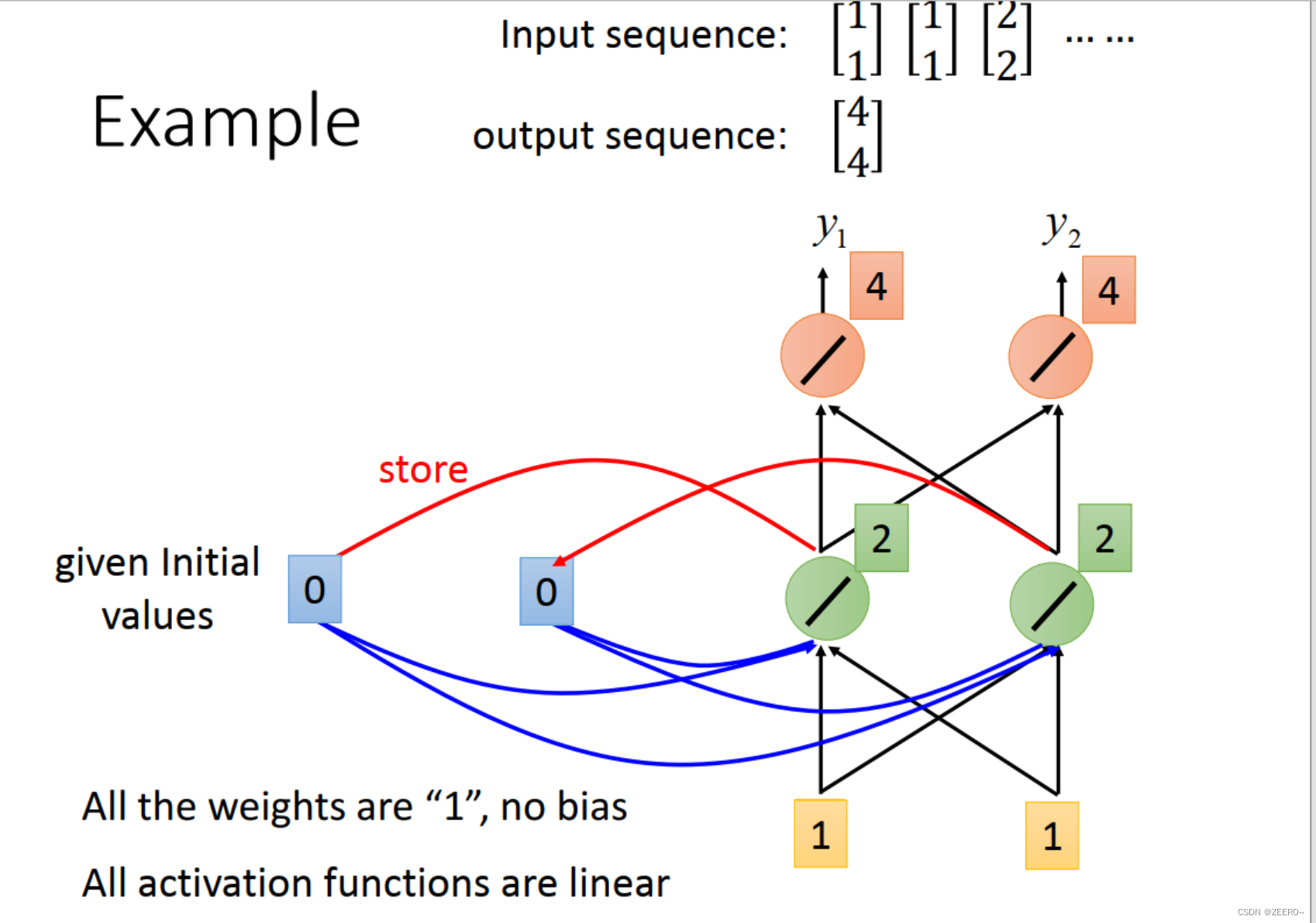
举例来说,我们输入的第一个向量为[1,1],则hidden layer的输出为[2,2],先被储存起来,输出为[4,4]。
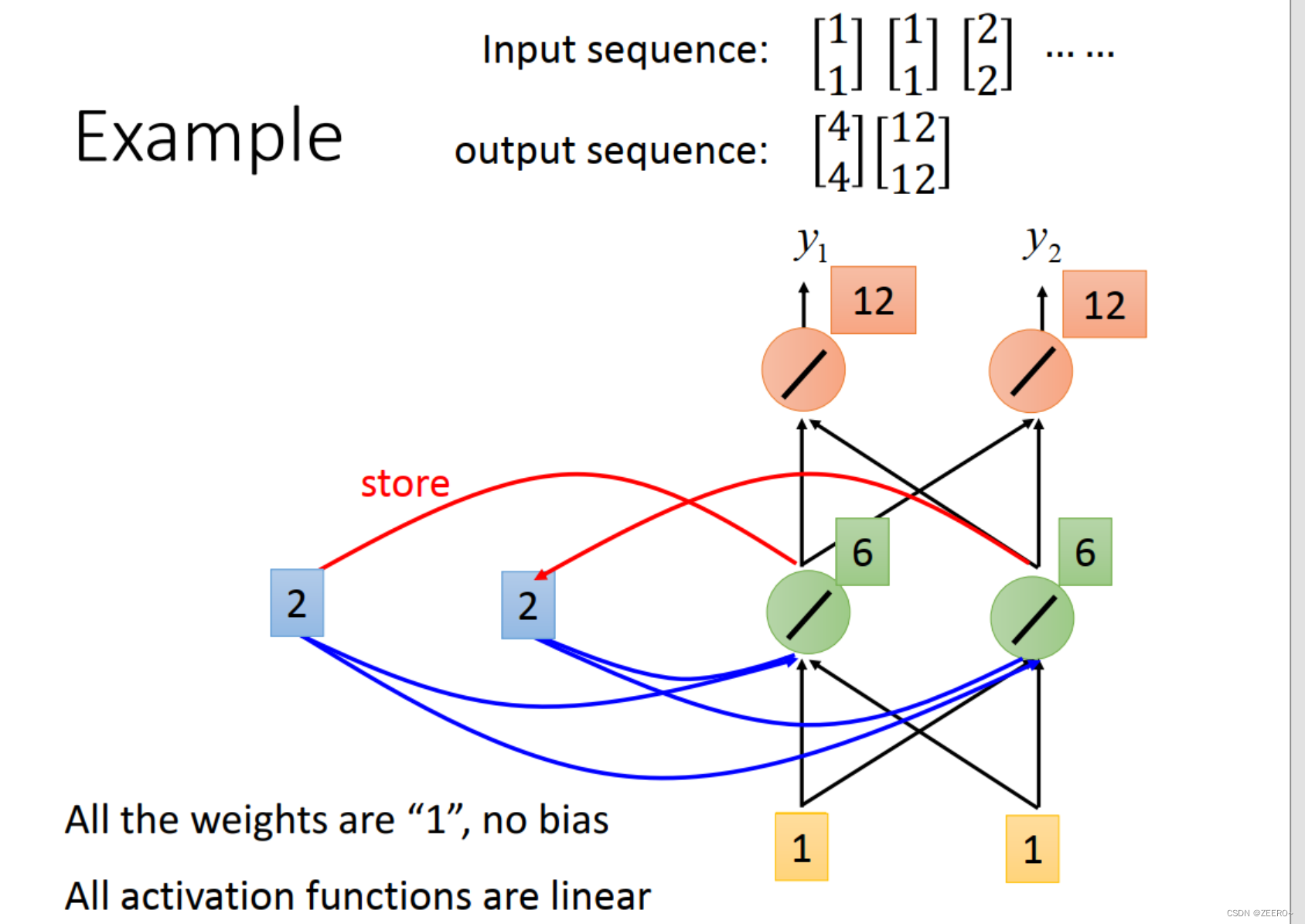
第2个输入仍然为[1,1]。这个时候结合前一个memory的输出[2,2],hdden layer的输出为[6,6],output为[12,12]。
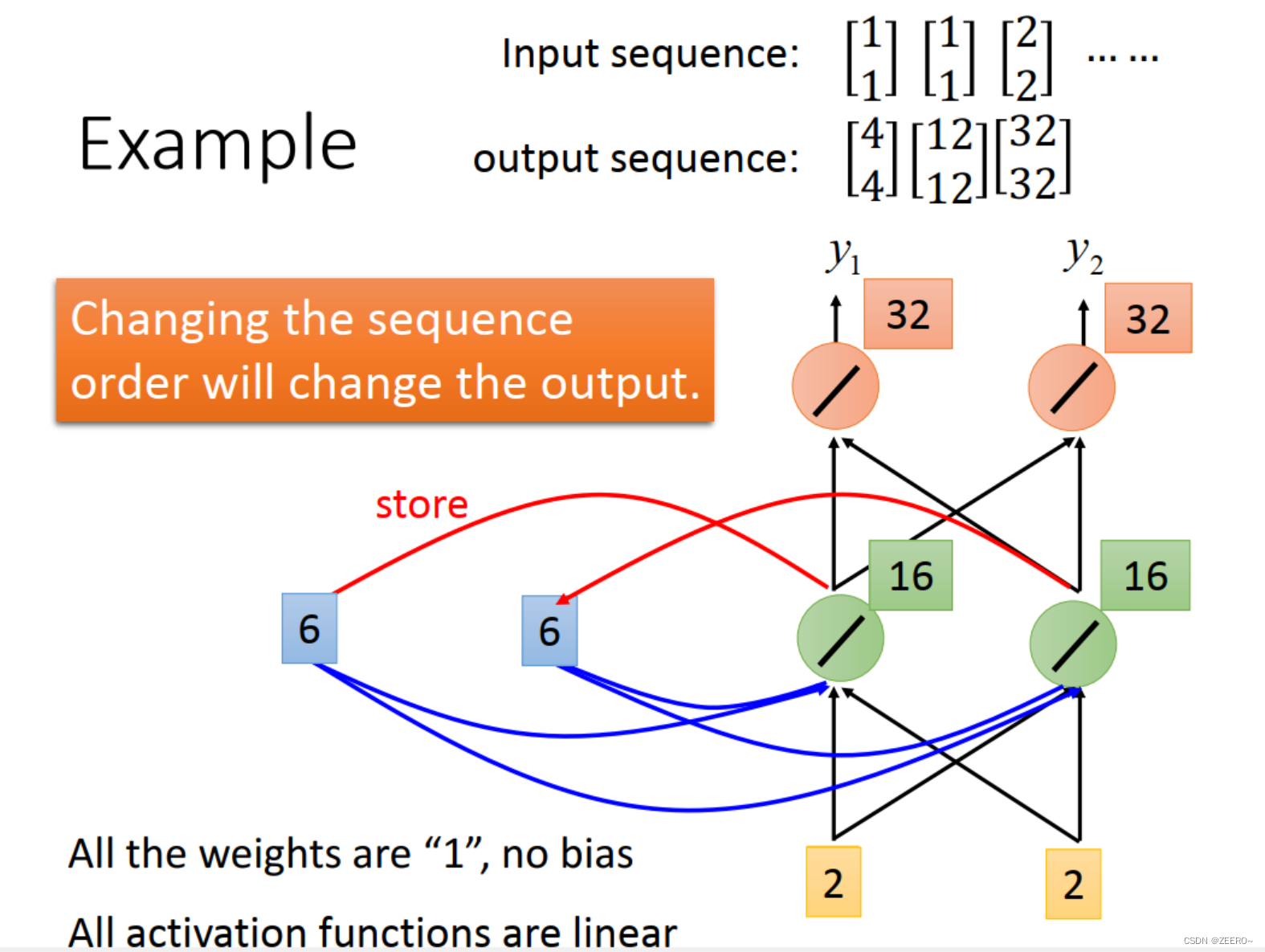
第3个输入为[2,2],结合前一个memory的输入为[6,6],这个时候hidden layer的输出为[16,16],output为[32,32]。
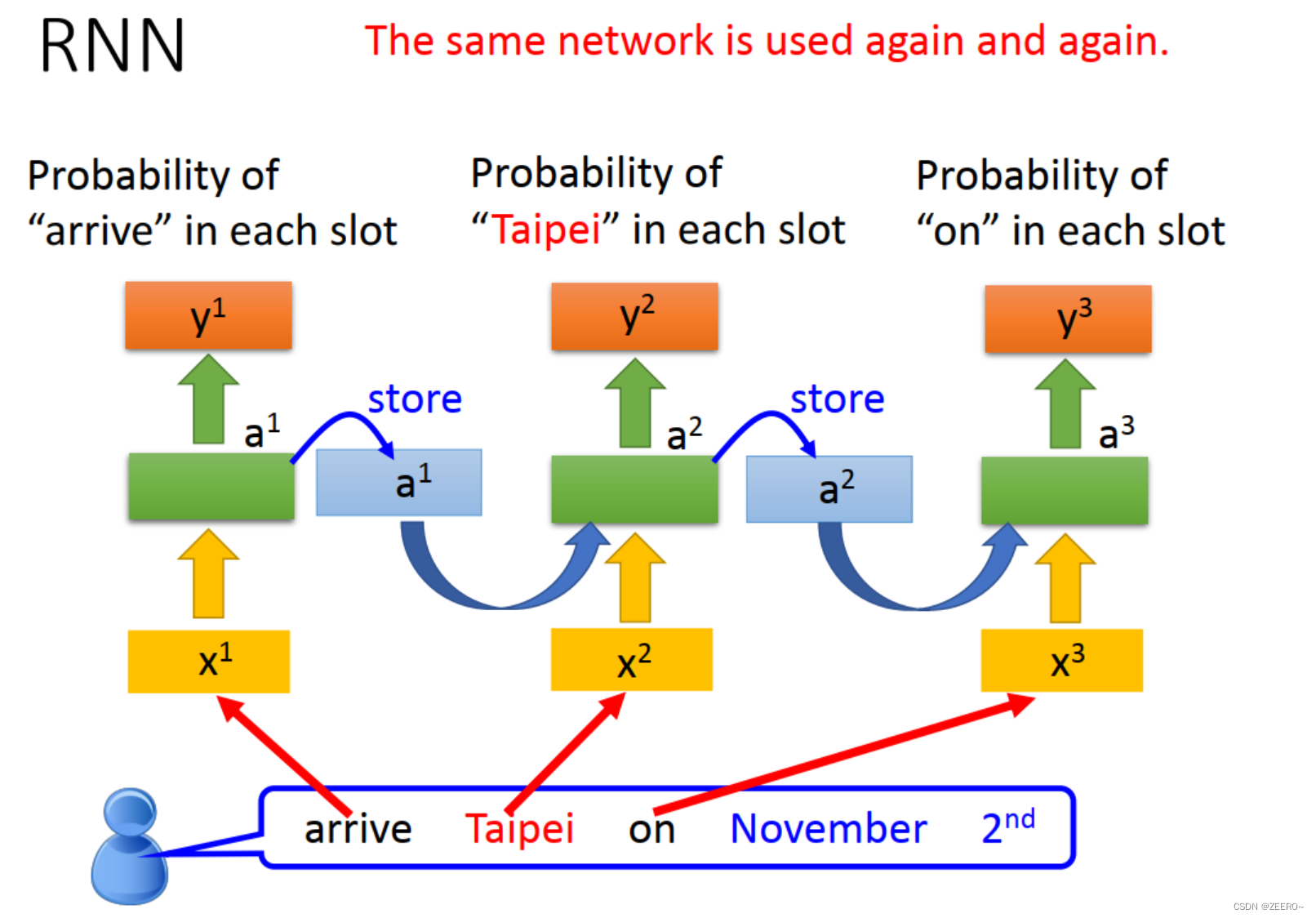
RNN的网络结构如上图所示,重复利用了同一种相同的网络结构。
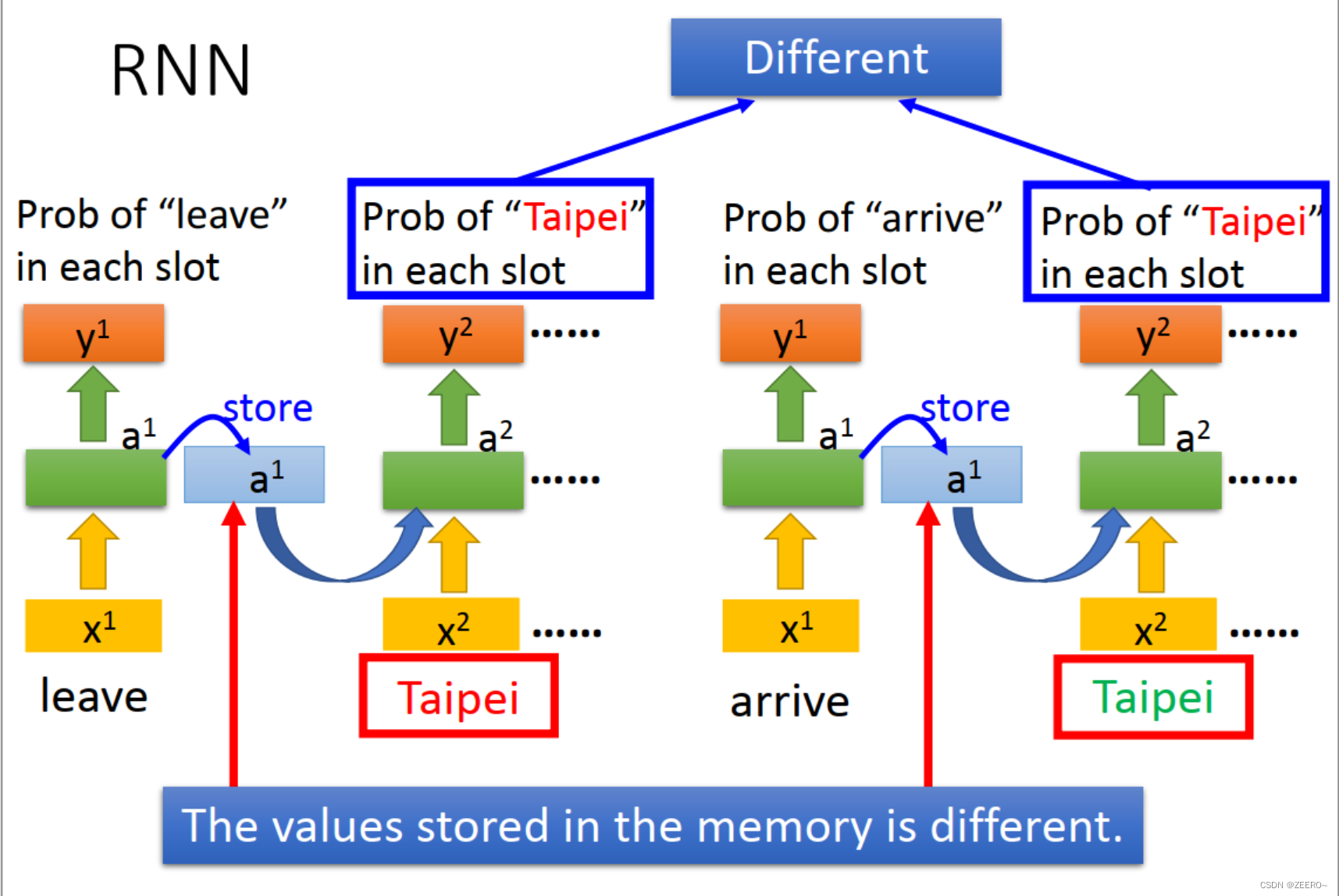
每次储存在memory中的值并不相同。
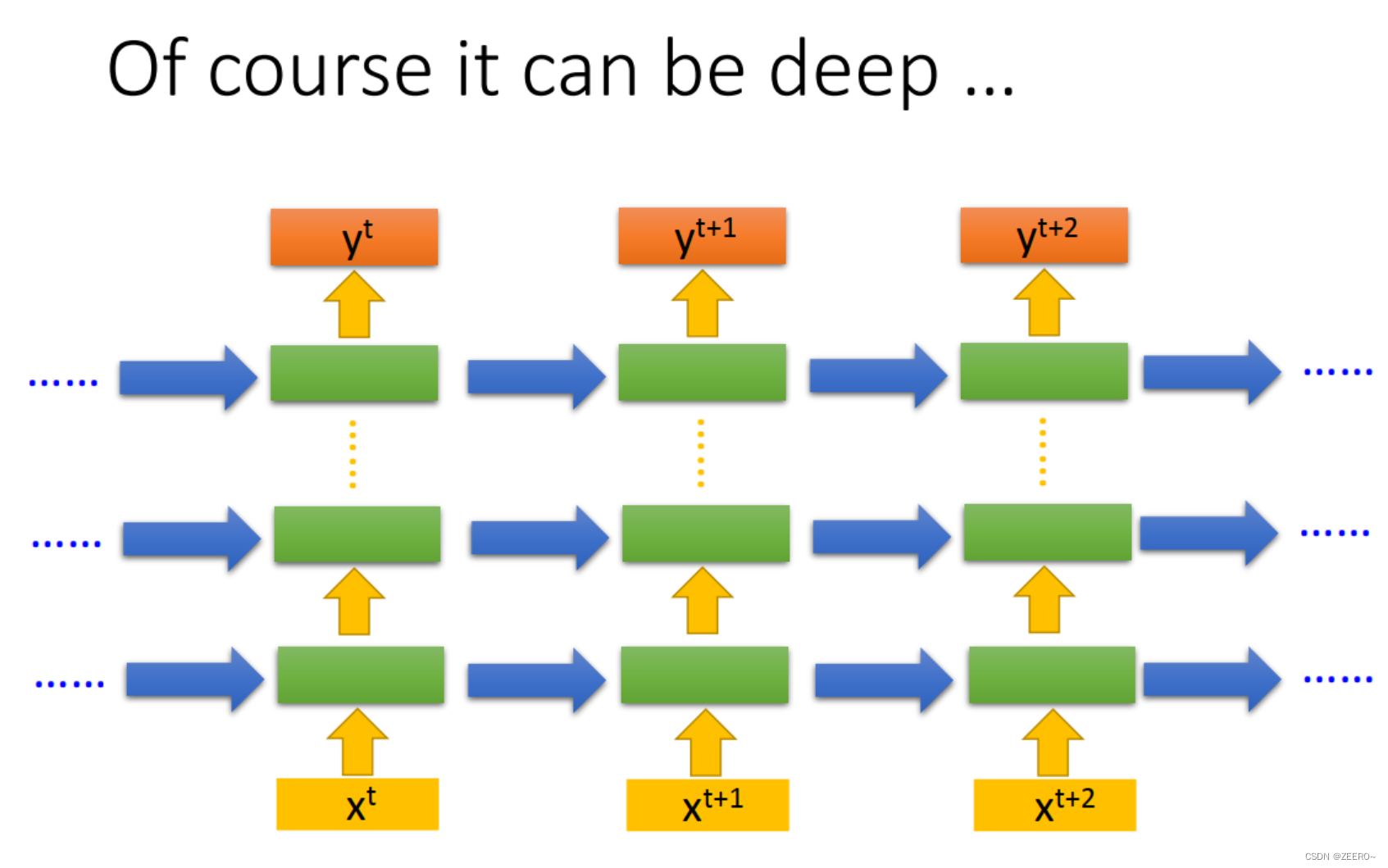
当然,也可以把hidden layer的层数加深。
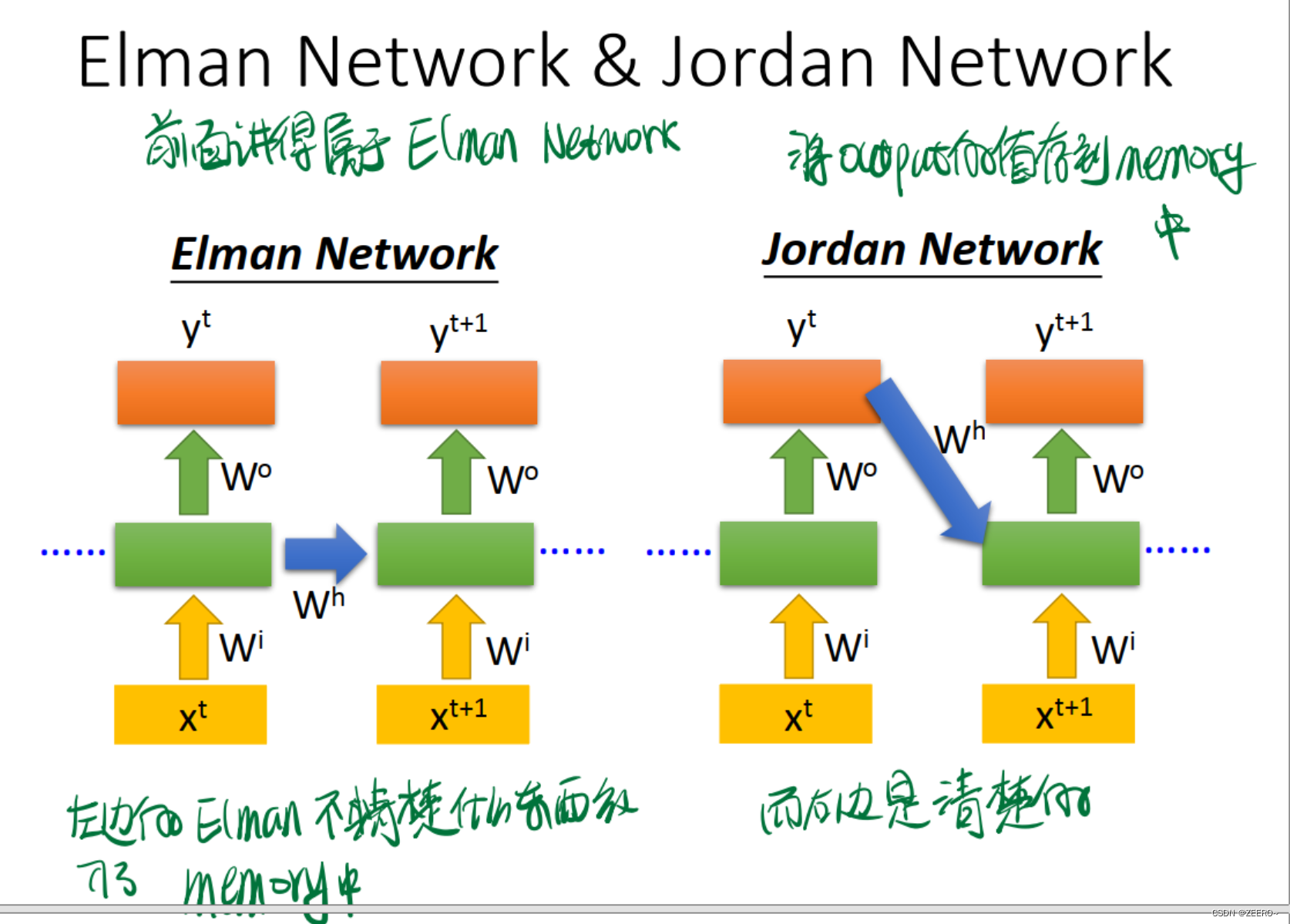
3种典型的RNN网络结构
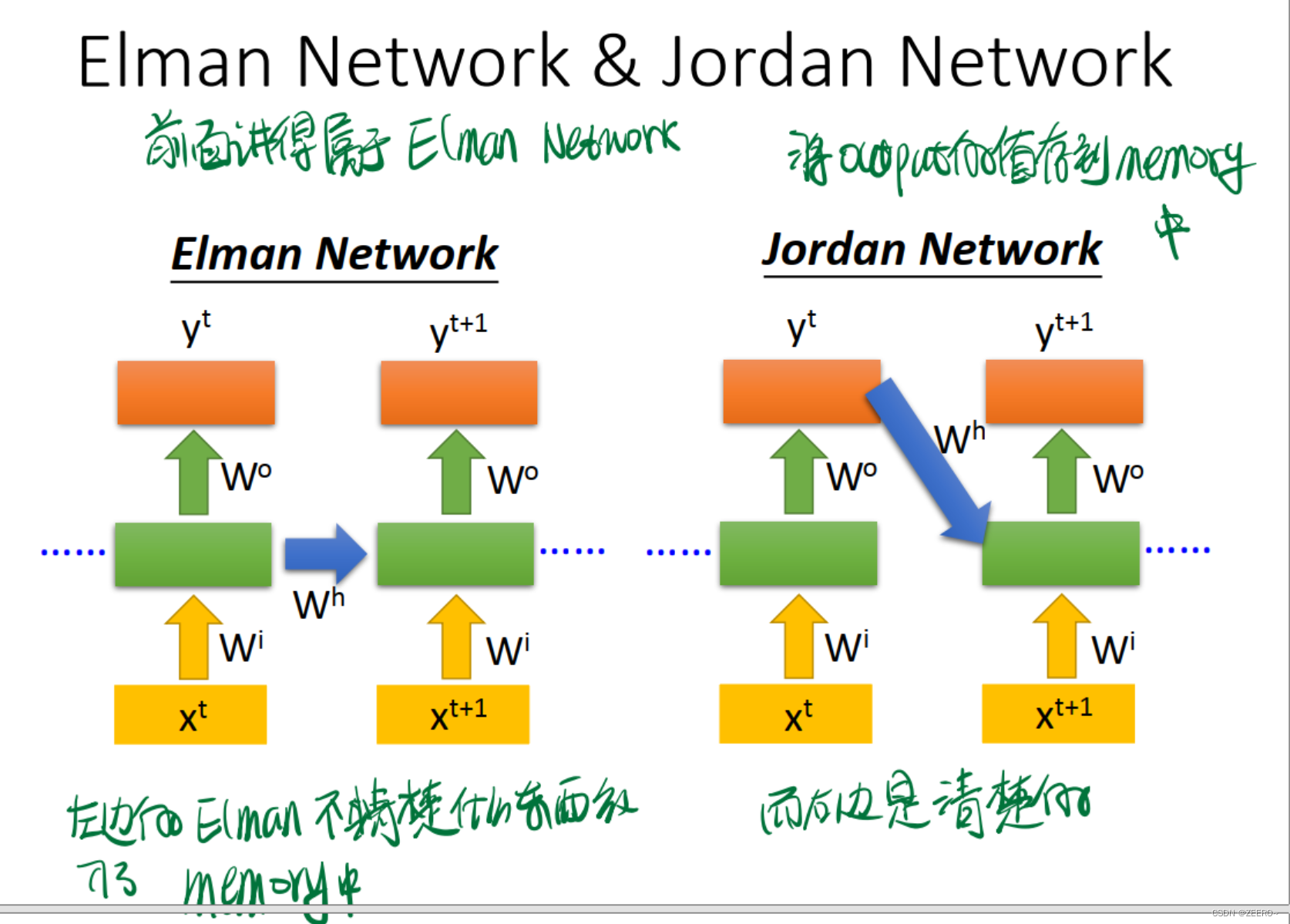
Jordan Network和Elamn Network的区别在于是将每个output的值作为下一个的输入。右侧的网络结构可解释性更强。
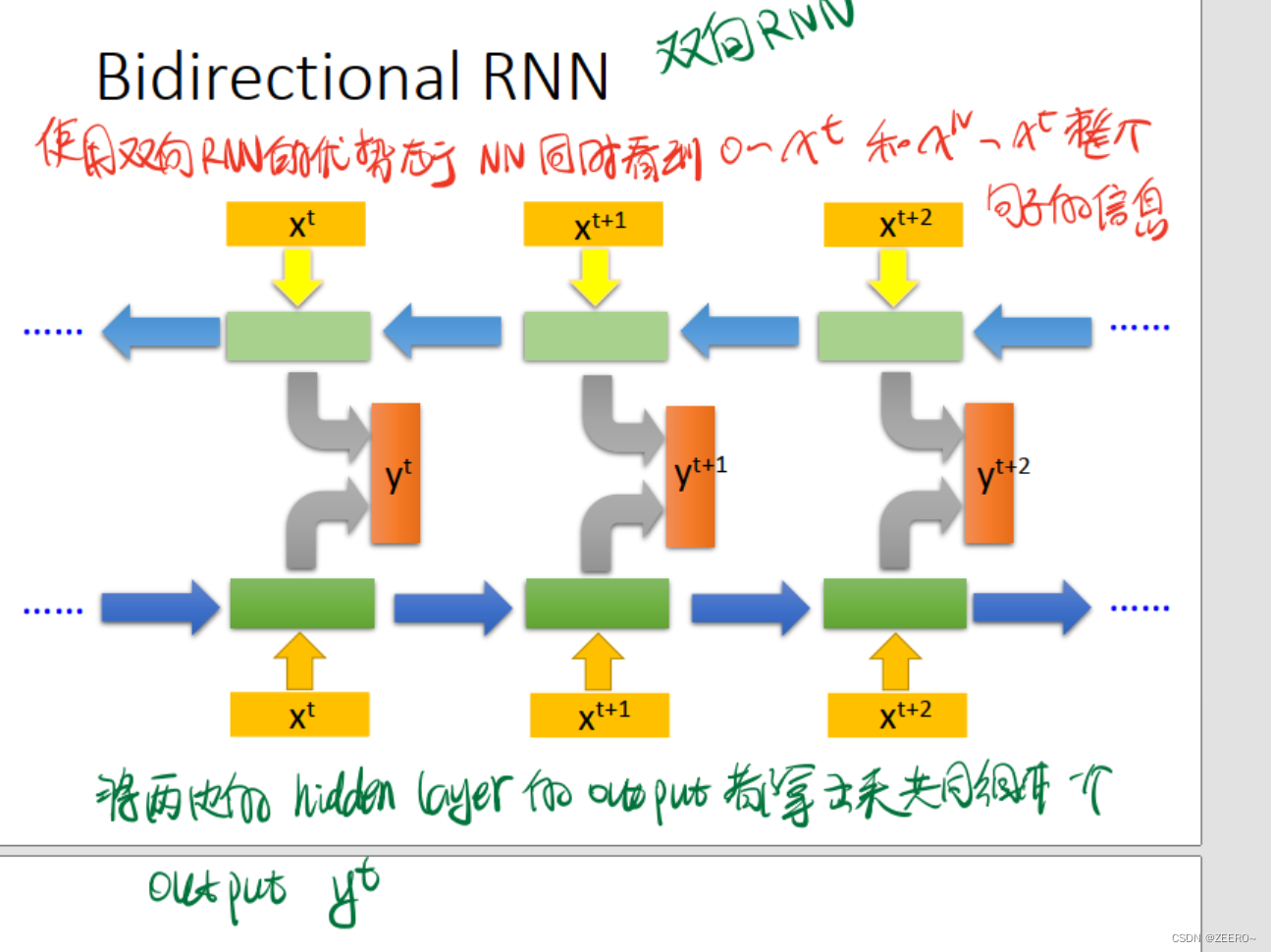
双向RNN则更为全面,同时兼顾到了前后的上下文信息,而不仅仅是前面的信息。
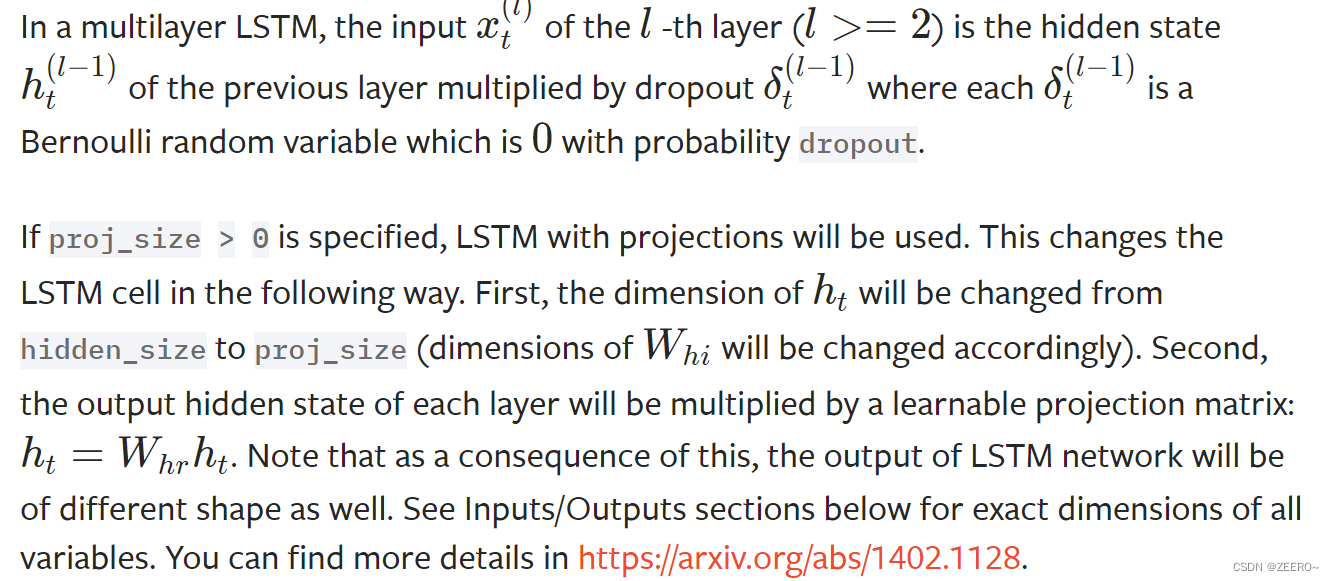
二、LSTM
我们在实际过程中使用更多的则是LSTM。
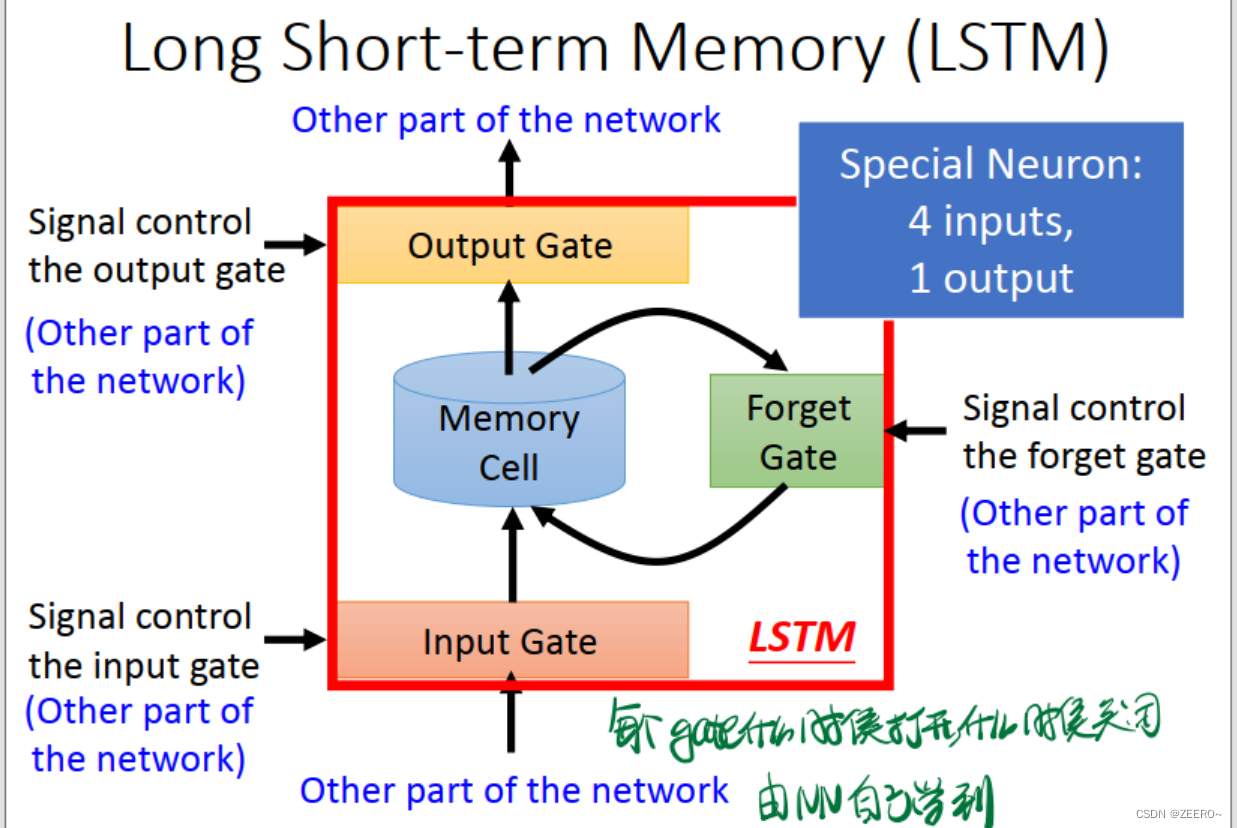
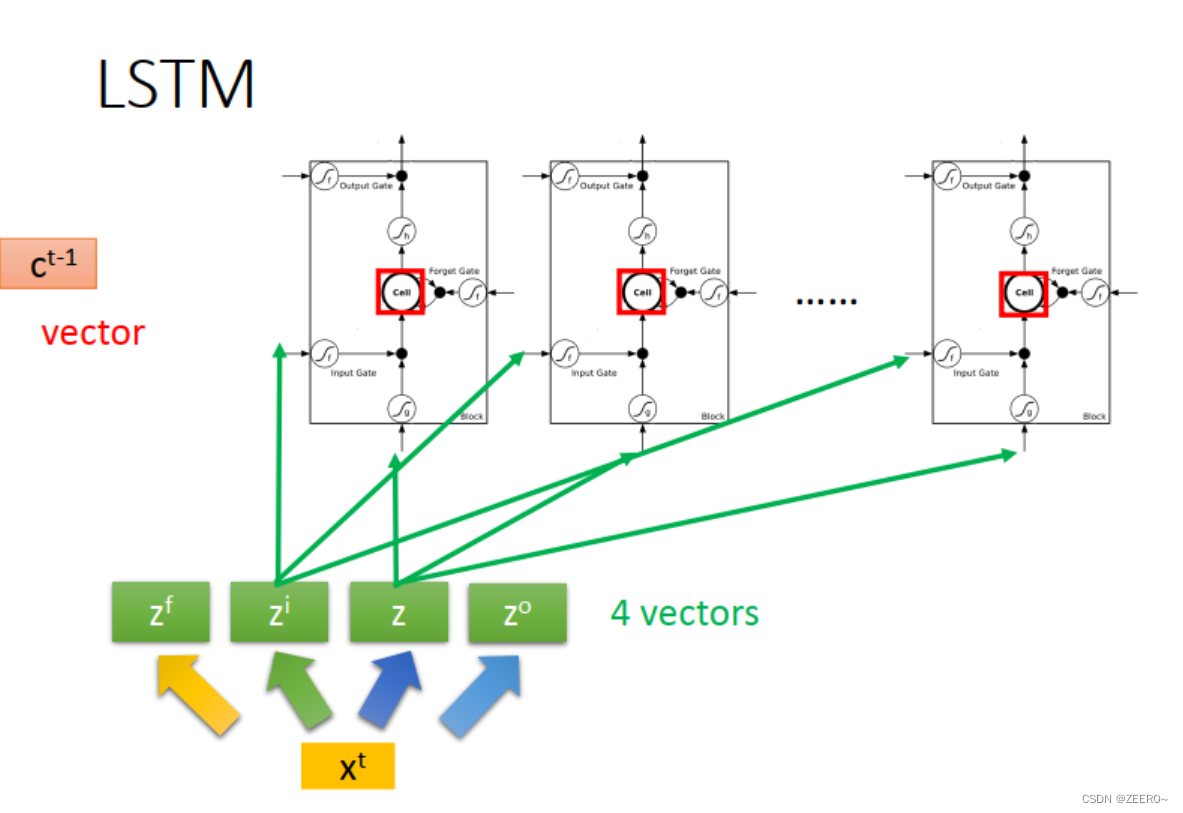
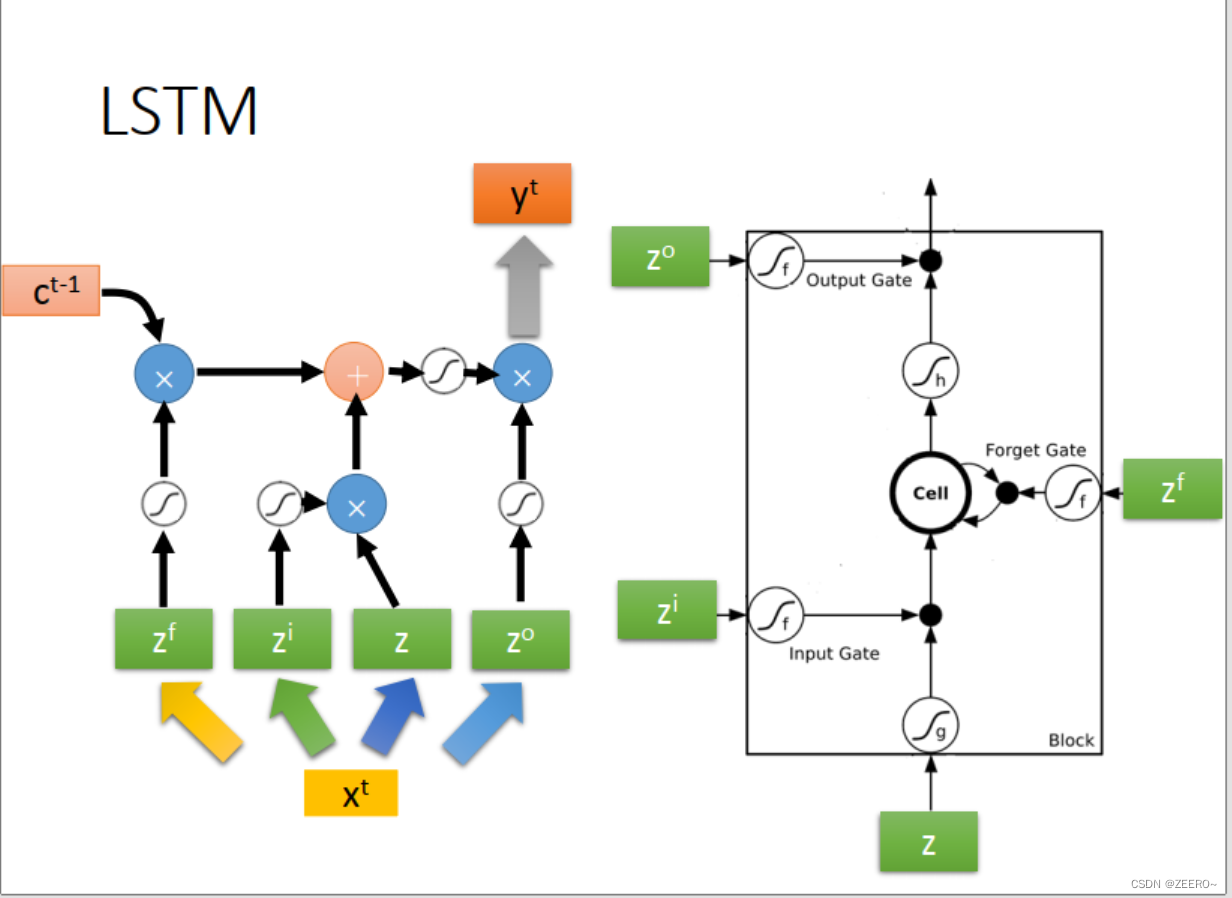
LSTM实际上,是将RNN中hidden layer的输出存入memory cell的过程稍微复杂化了一些,使用了3个gate进行代替。input gate的作用是控制输入通过,forget gate的作用是控制对memory cell中的值是否进行清空。output gate的作用是控制是否将该memory cell的值输出。
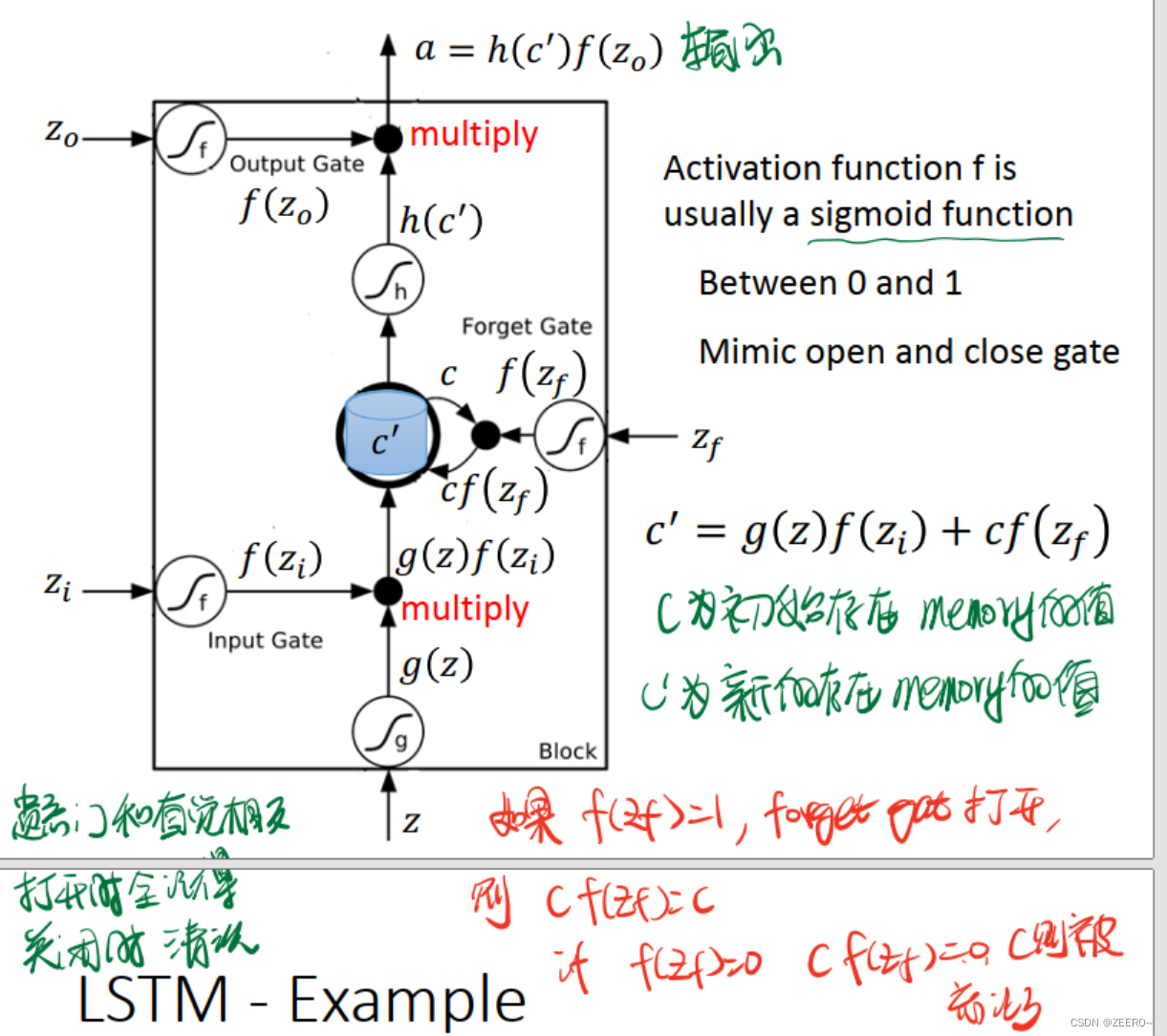
每个门的激活函数都是sigmoid函数,因为这样恰好可以将输入值映射到(0,1)之间。0表示不允许通过,1表示可以通过。
这里额外说下,forget gate和直觉似乎有点相反。当
f
(
z
f
)
=
1
f(z_{f})=1
f(zf)=1时,表示forget gate打开,但是
c
f
(
z
f
)
=
1
cf(z_{f})=1
cf(zf)=1,c表示前一个memory cell的值,
c
′
c'
c′表示本次计算出来的值。这个时候,前一次计算出来的c的信息完全没有被forget。因此,forget gate打开时,不是表示forget,而是表示unforget。
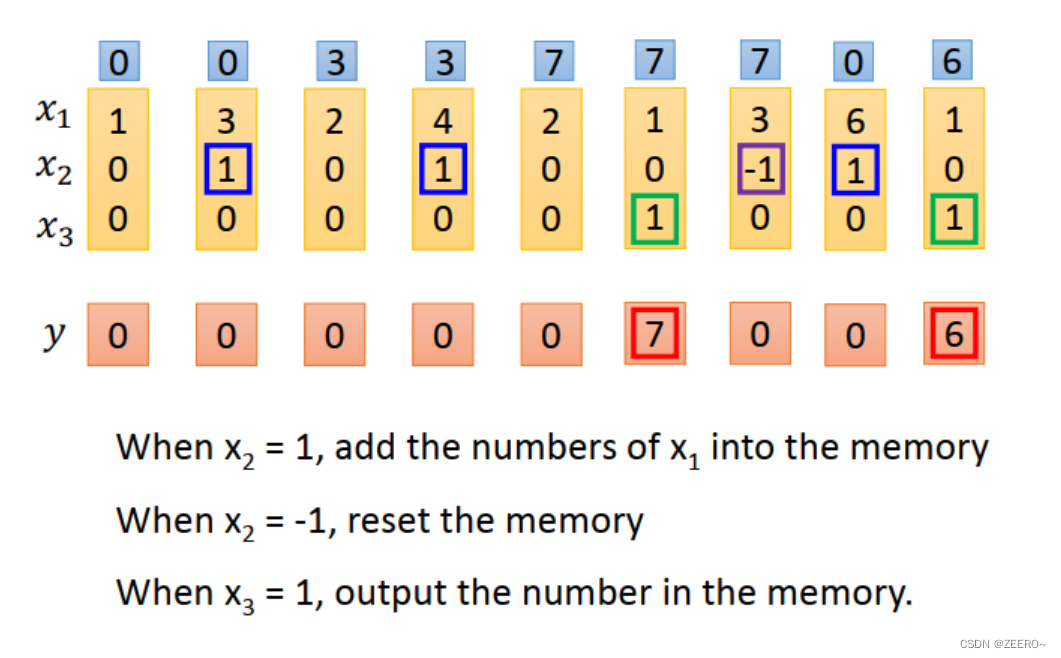
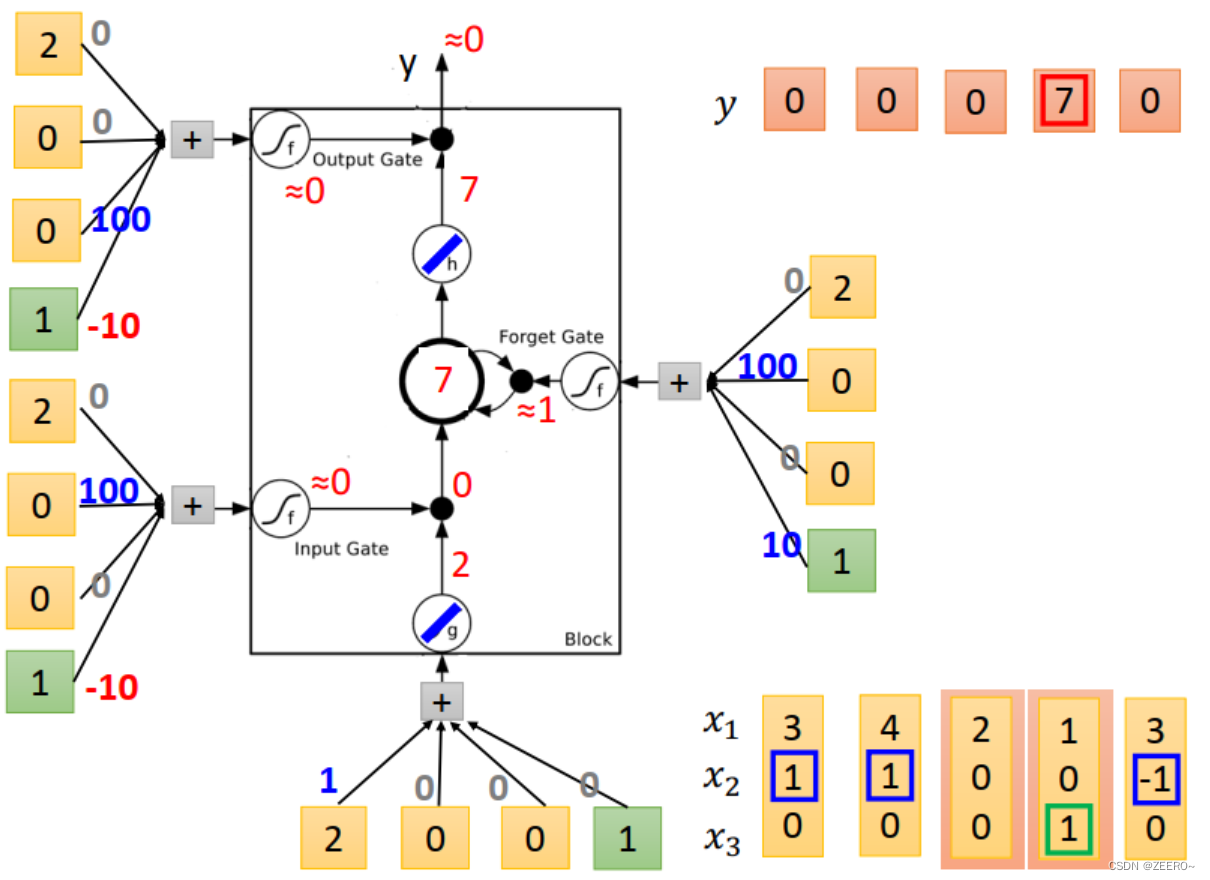
举例来说,假如想设计一个LSTM网络,实现上面的功能。
当x2=1时,将x2的值写入到memory中。memory时最上面蓝色框的值。
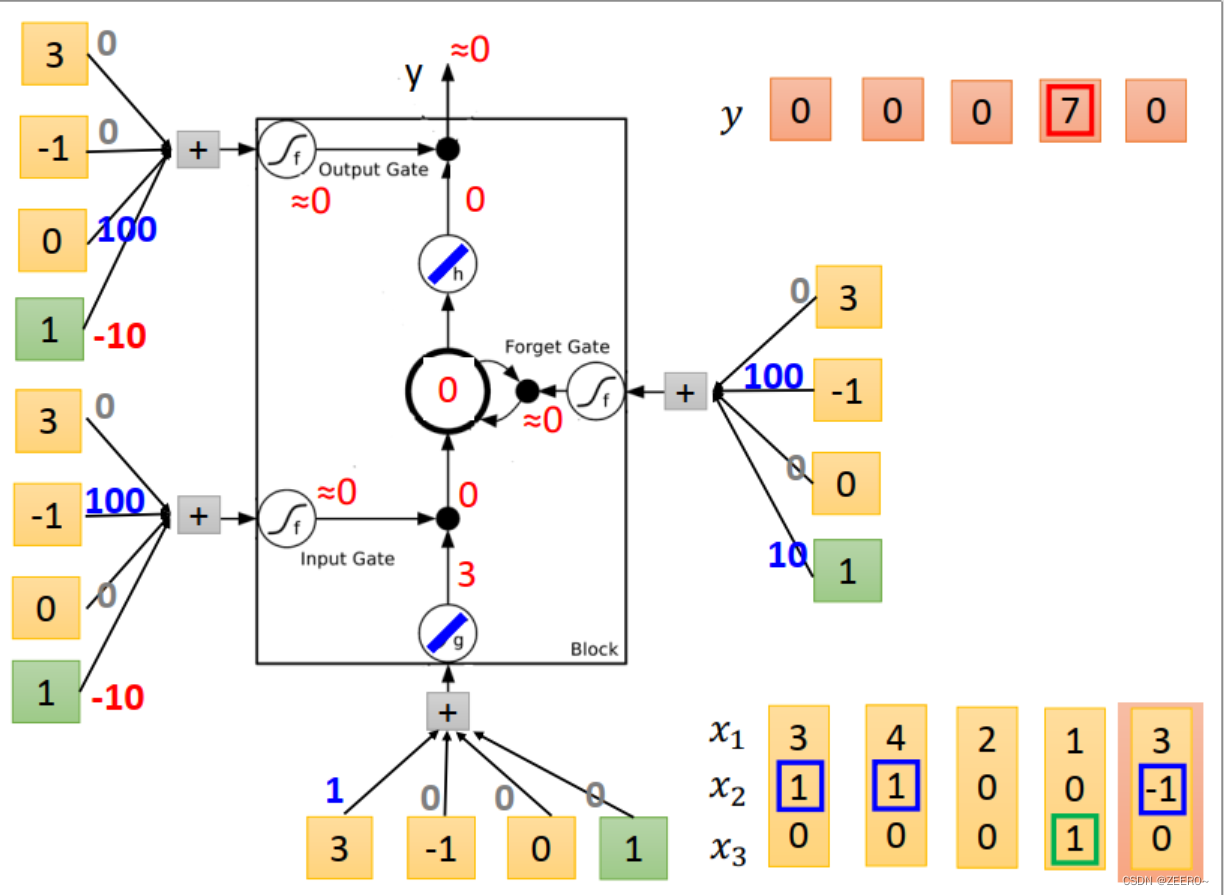
当x2=-1时,将memory中的值进行reset。
当x3=1时,将memory中的值进行输出。
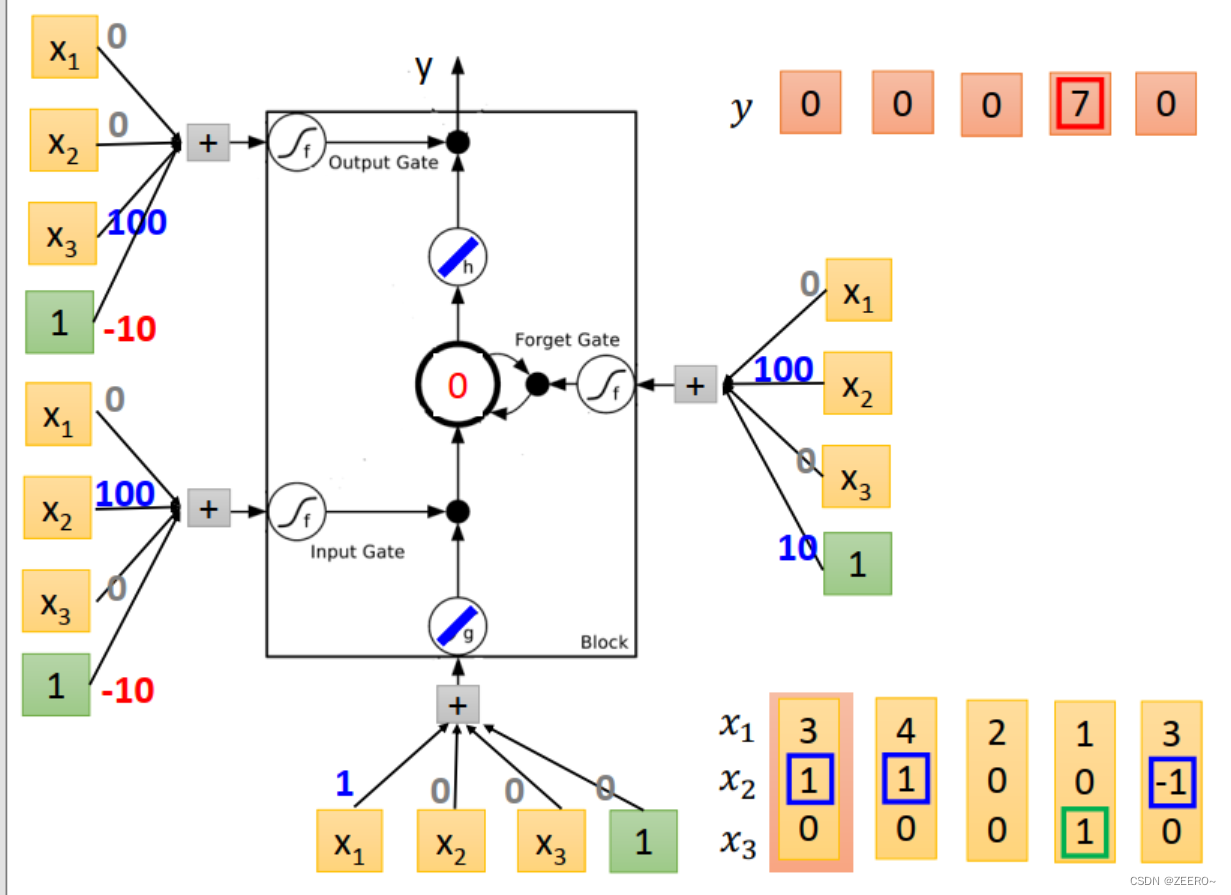
我们设计的NN结构如上图所示。输入乘的4个weight为[1,0,0,0]。input gate控制信号为输入与[0,100,0,-10]相乘,依次类推。
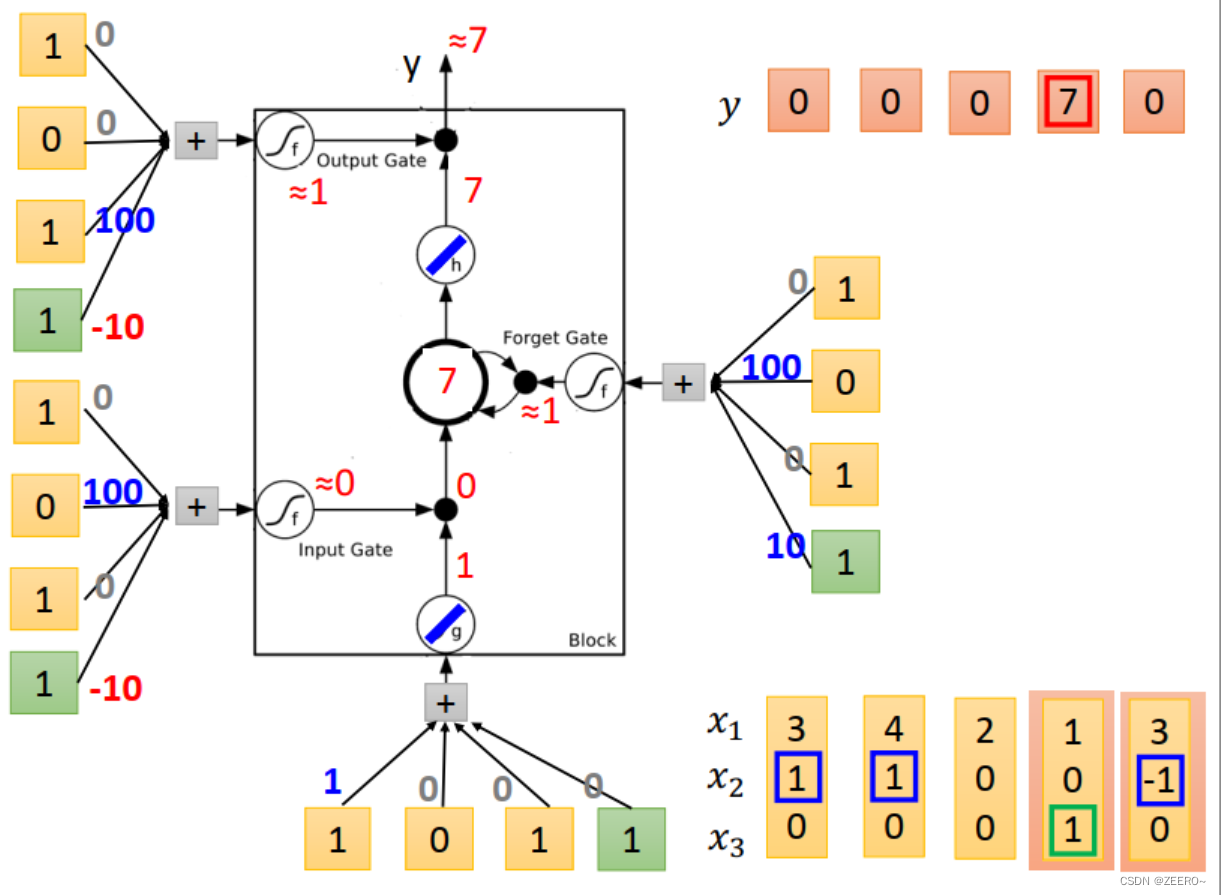
当输入为[3,1,0]时,input的值为3,input gate的值为1,multiply之后得到3.forget gate 的值为1,与前一个memory cell的值0相乘后再加3得到3,outputgate 的值为0,因此输出为0,memory cell的值更新为3,为本次运算的结果。

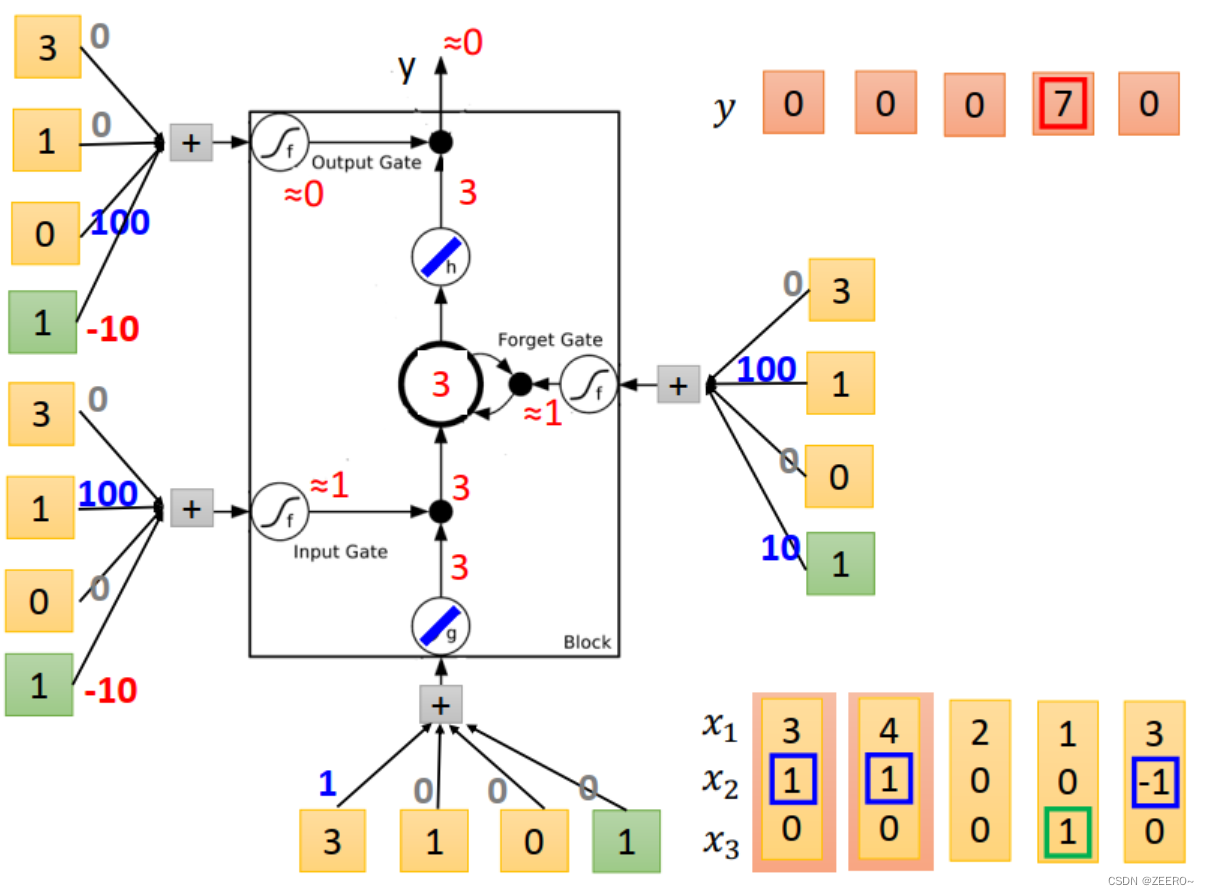
当输入为[4,1,0]时,input 的值为4,input gate=1,multiply之后得到4,forgat gate =1,与
C
t
−
1
=
3
C_{t-1}=3
Ct−1=3相乘后+4=7,forget gate的值为0,因此output=0,memory cell更新为7.
LSTM和普通NN、RNN区别
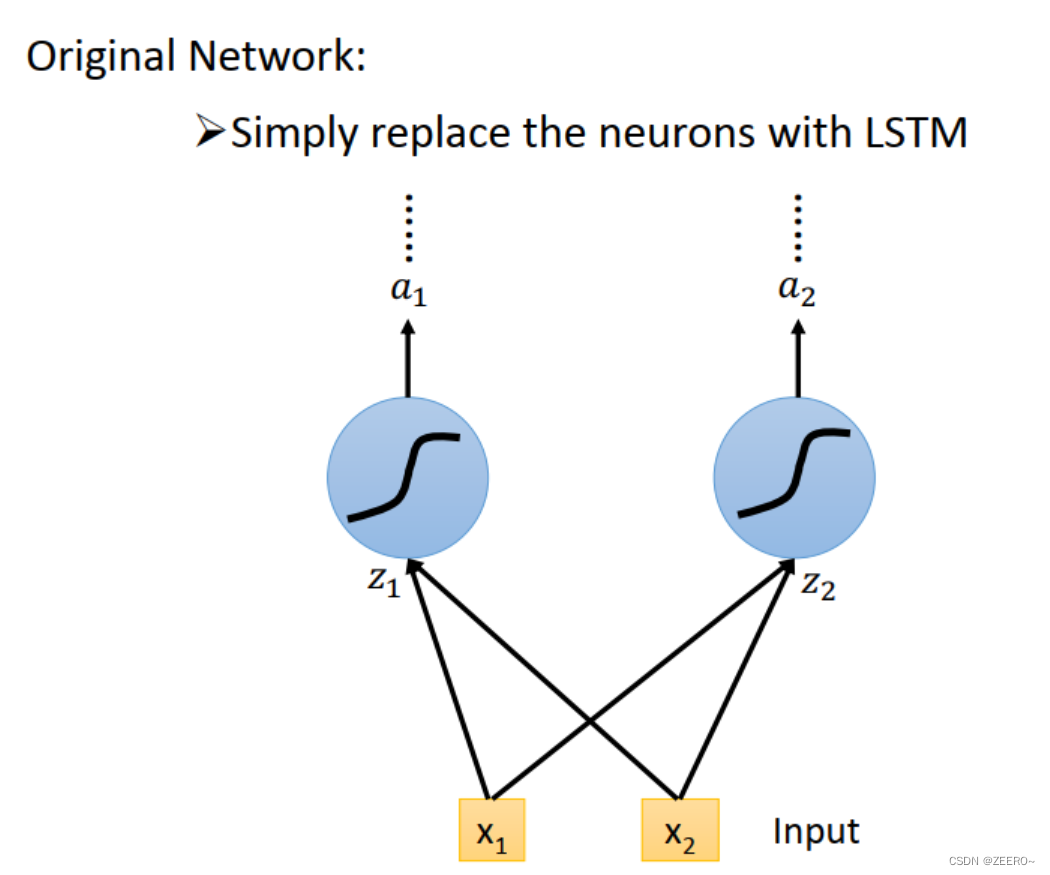
前面已经讲述过,LSTM可以看作是将普通的hidden layer替代成由4个输入控制的cell。
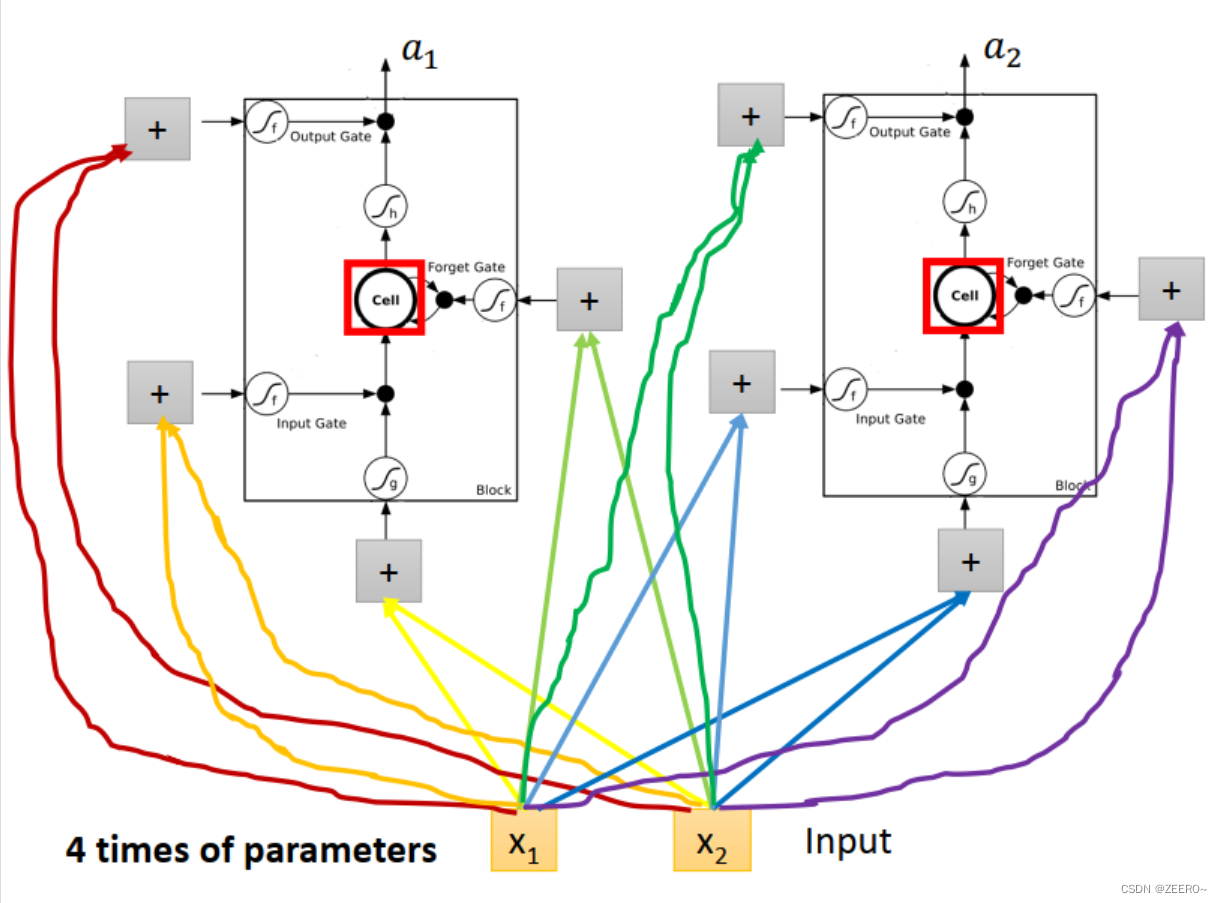
将输入[x1,x2]分别乘上不同的matrix后输入,用于控制input ,input gate,forget gate,output gate。因此,LSTM网络结构的参数量是普通NN的4倍。
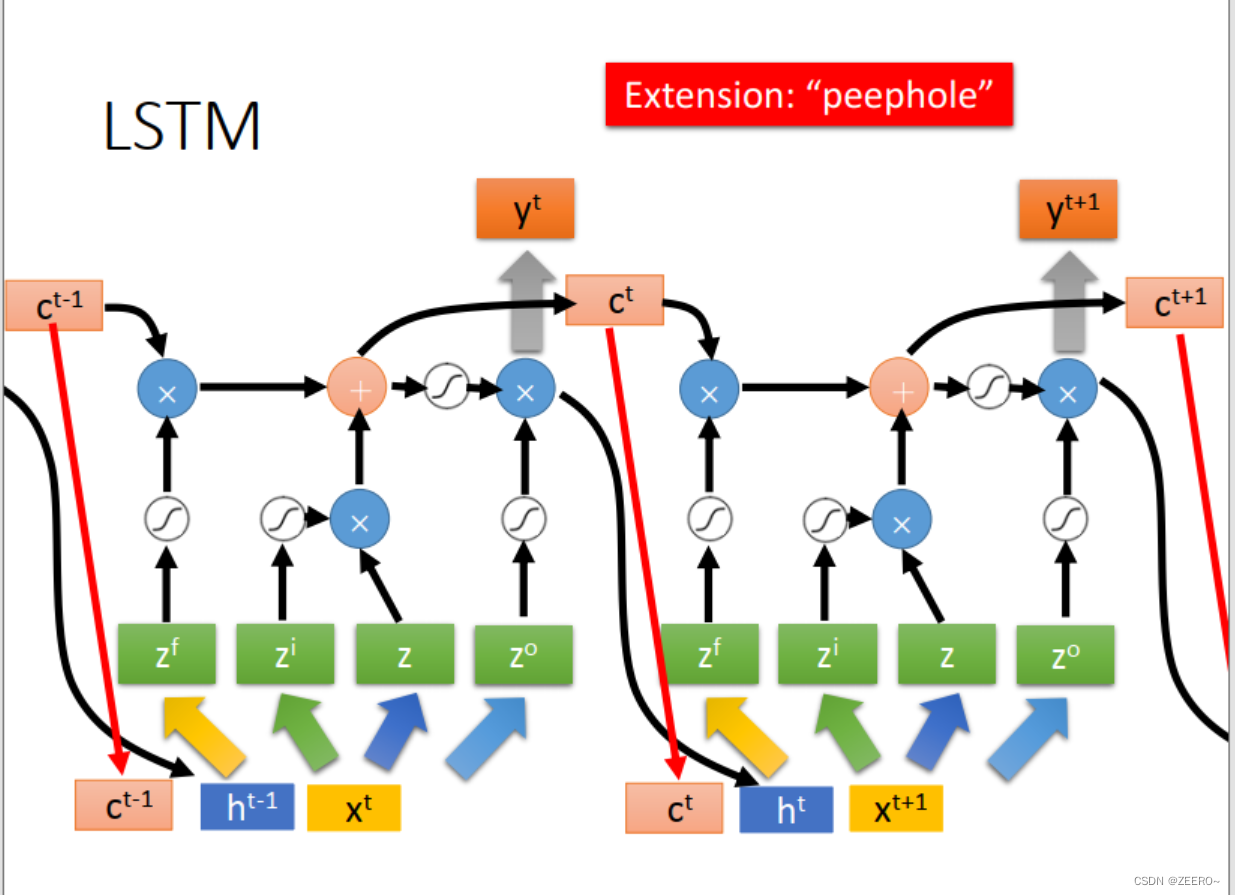
这里,peephole,指的是,在实际LSTM网络结构设计中,会将前一时刻的memory cell的值ct,输出ht的值一并加入到下一时刻作为输入。
这里LSTM虽然看起来很复杂,但是在实际中往往这是最标准化的设计。我们可以借助工具来实现它。
三、 RNN的训练
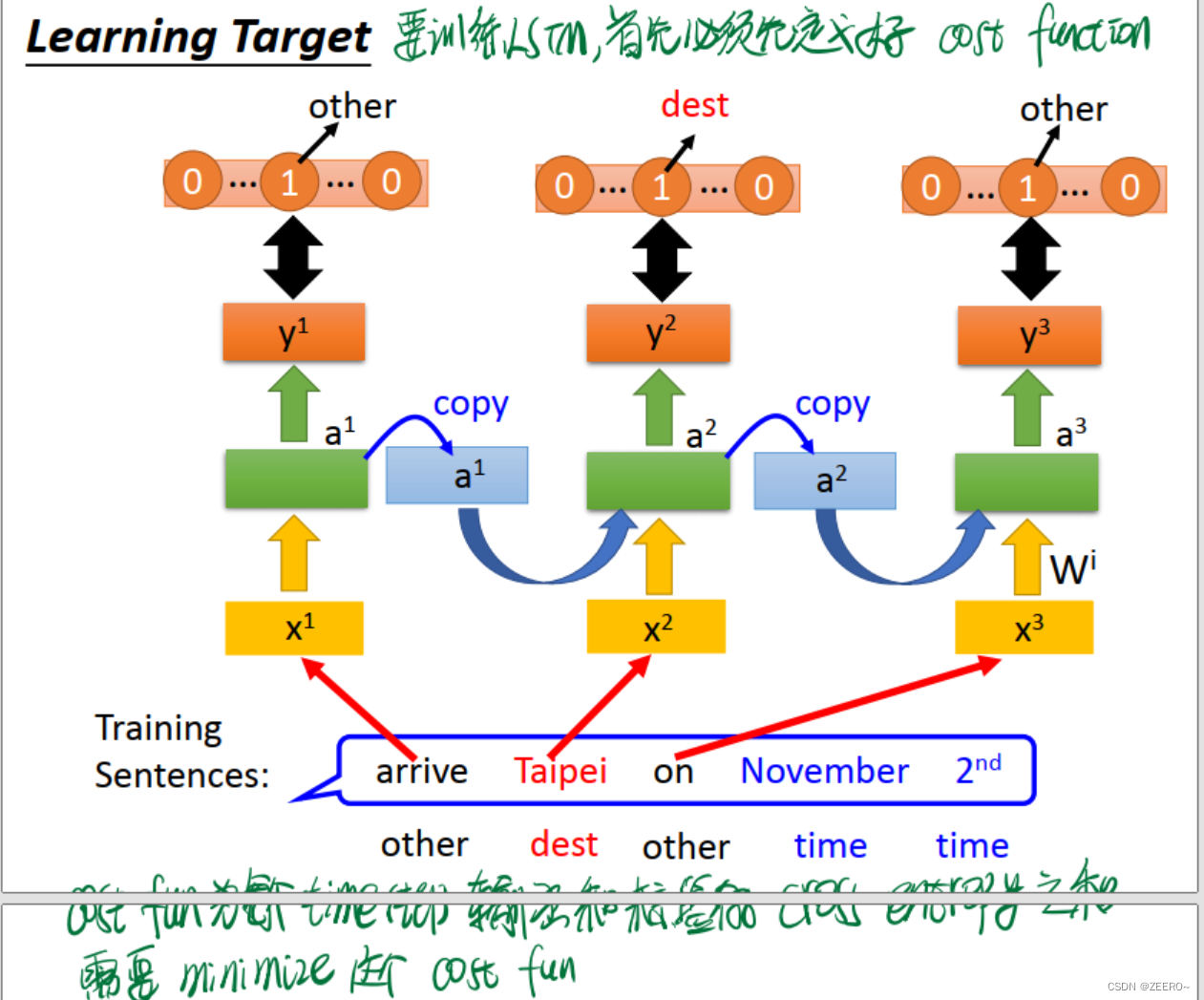
如果需要train一个RNN,则必须首先定义好cost function。很显然,这里RNN的cost function为每个time step的输出和对应标签vector的cross entropy之和,也是我们需要minimize的函数。
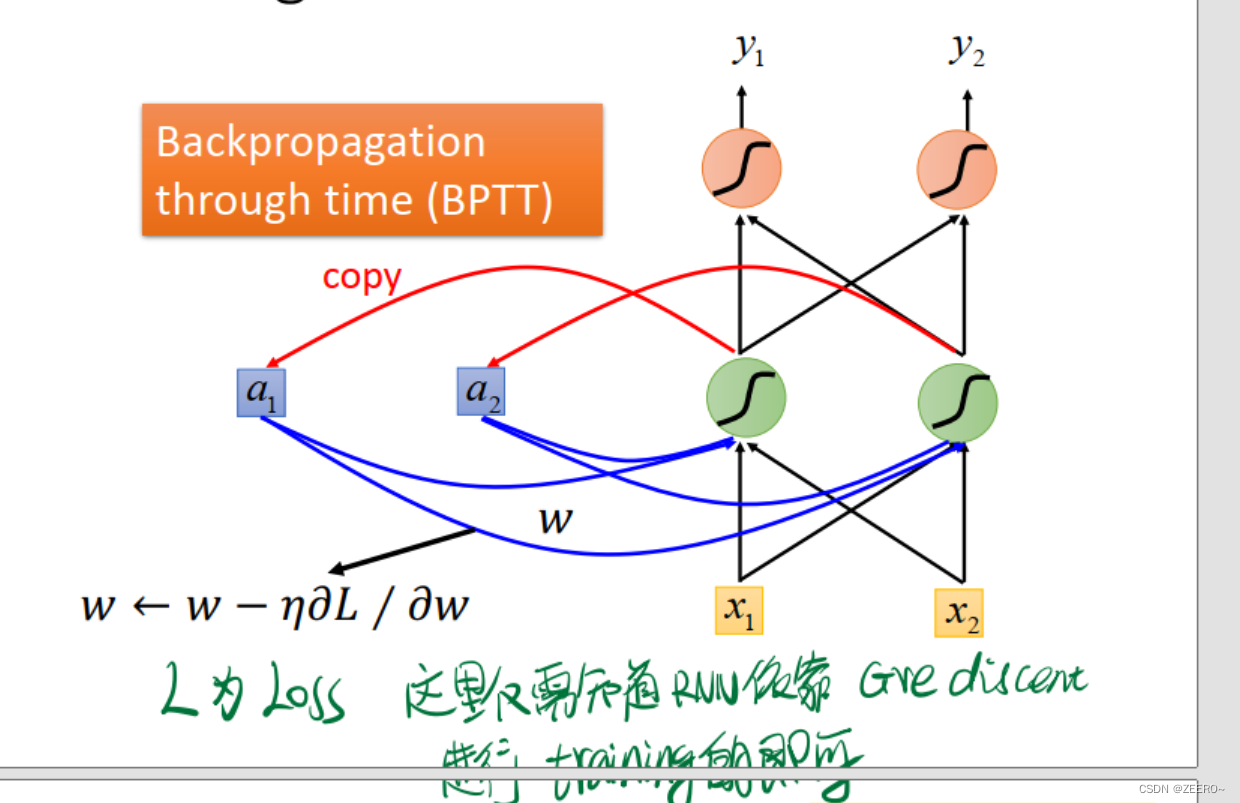
使用的方法呢,叫做BNPP(Backpropagation through time),和一般的bp有细微的区别。
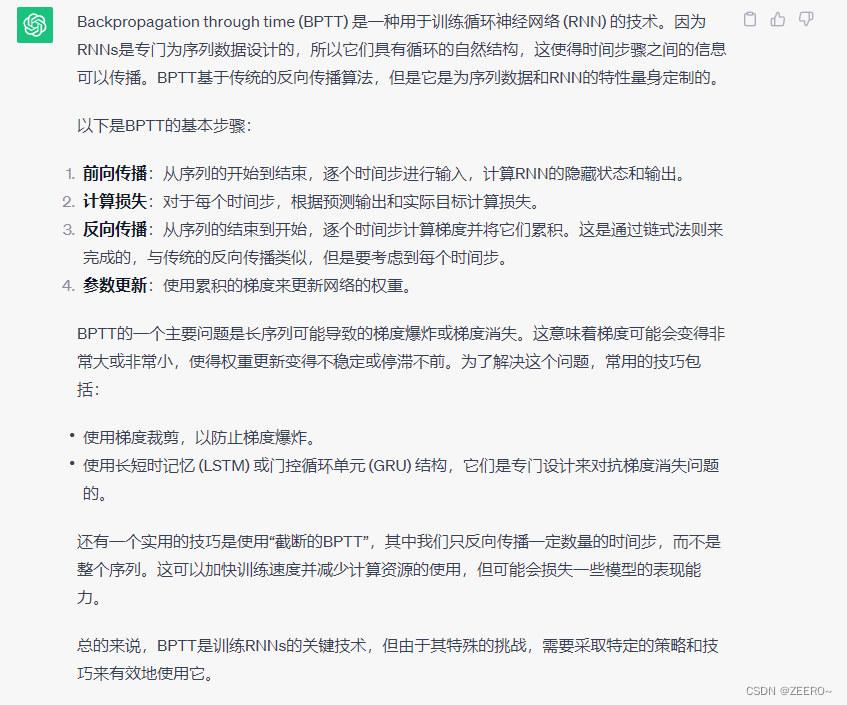
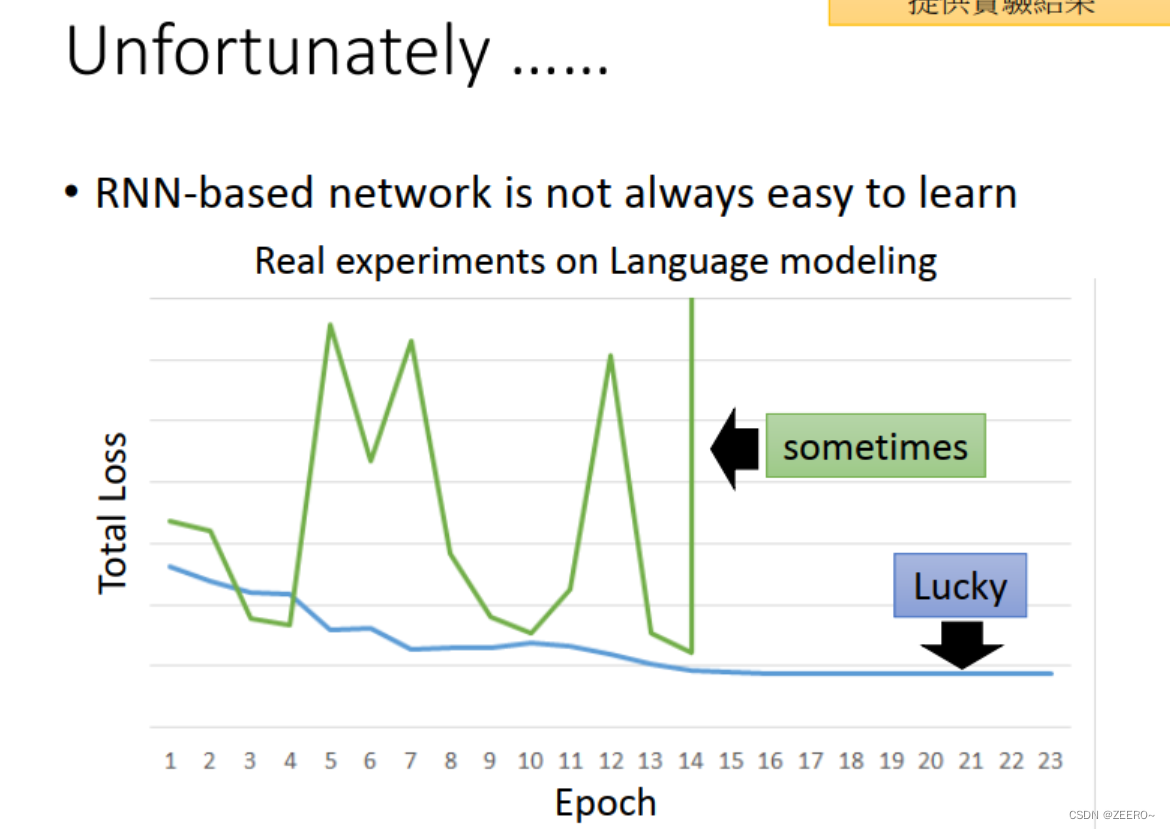
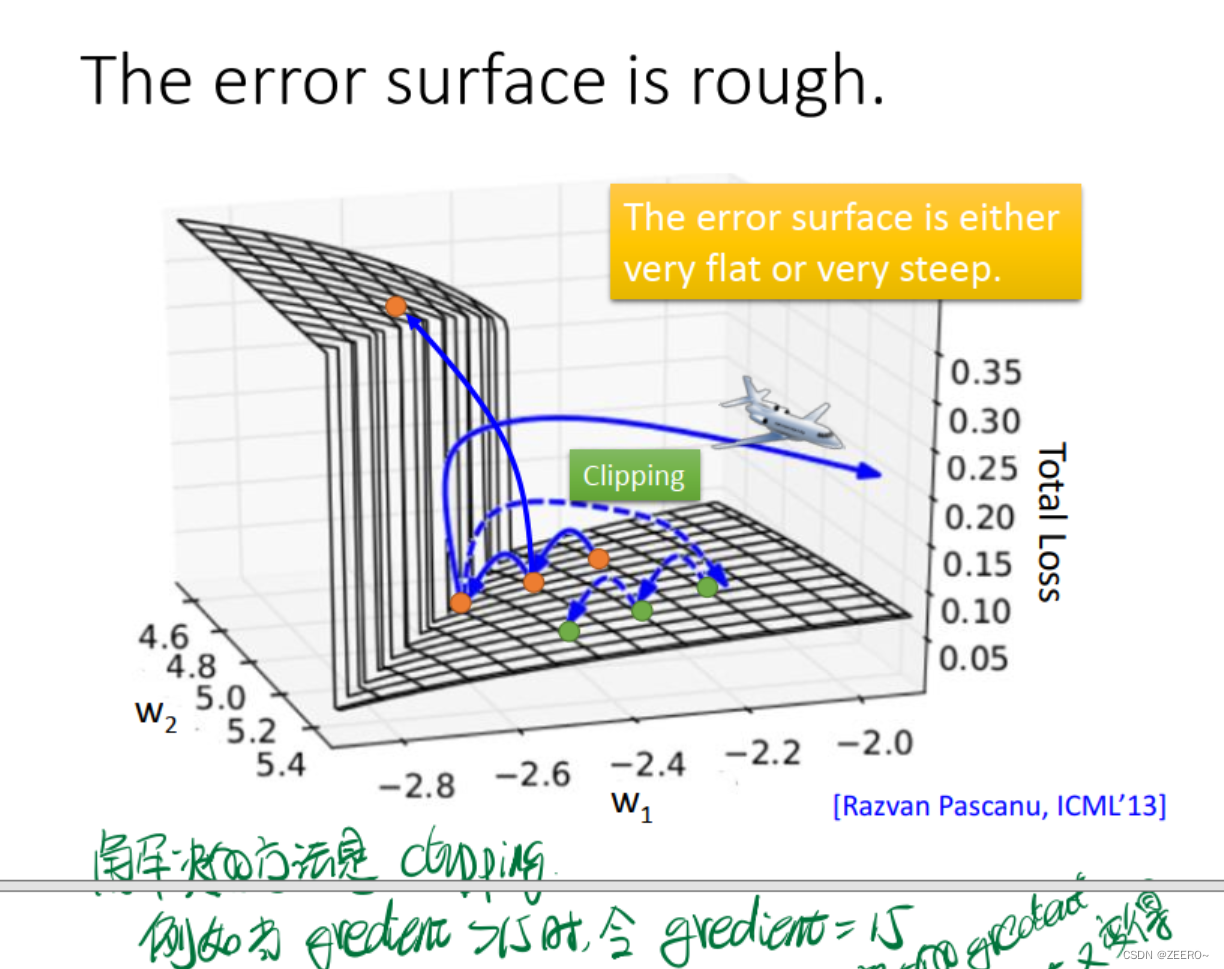
为何会出现这种情况呢,我们可以分析原因。
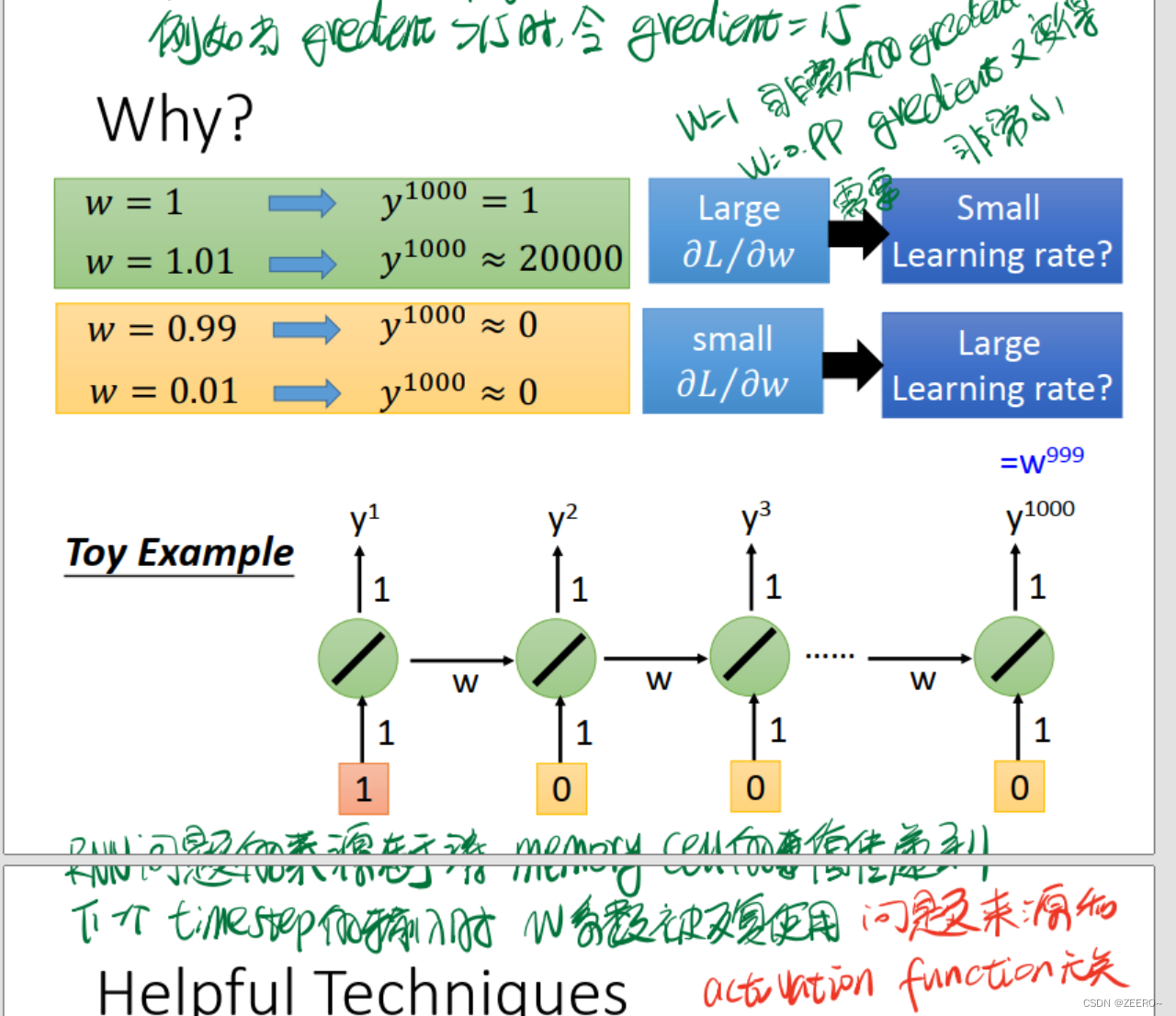
其实问题的来源,就是在于长序列导致的梯度消失或爆炸。一个非常实用的方法则是使用LSTM。
LSTM可以解决梯度消失的问题,但不能解决梯度爆炸的问题。
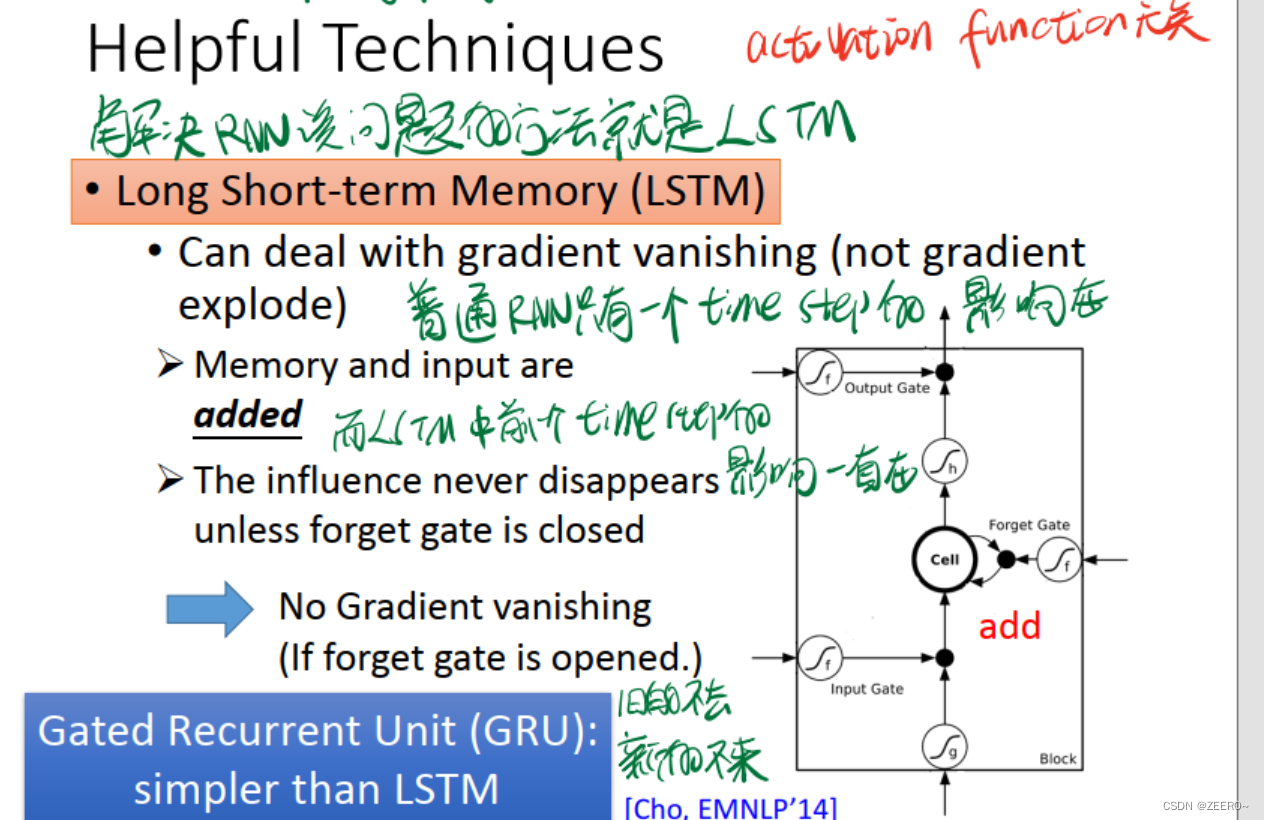
为什么LSTM可以解决梯度消失的问题呢。因为对于LSTM来说,前面每一个timestep中的信息,只要forget gate没有关闭,便会一直累加到最后。而普通的RNN,只会保留上一个timestep的信息。
一般来说,再设计LSTM网络结构时,需要做到使得大多数情况下forget gate是开启的,仅在少部分情况下forget gate会关闭。
另外一种LSTM的变种结构叫做GRU,GRU区别于LSTM,仅有2个gate。核心思想为旧的不去,新的不来。LSTM中的input gate和forget gate相互拮抗,只有forget gate关闭时,input gate才会打开。forget gate打开时,input gate则会关闭。
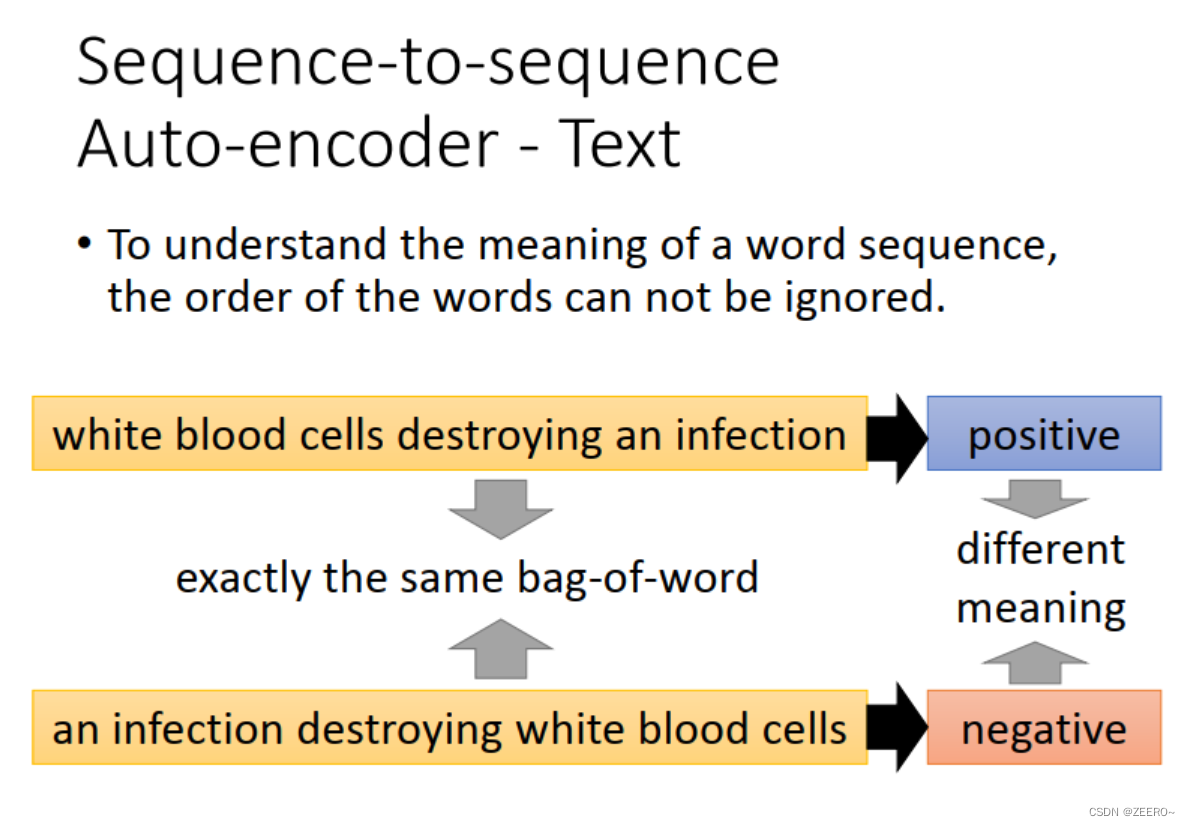
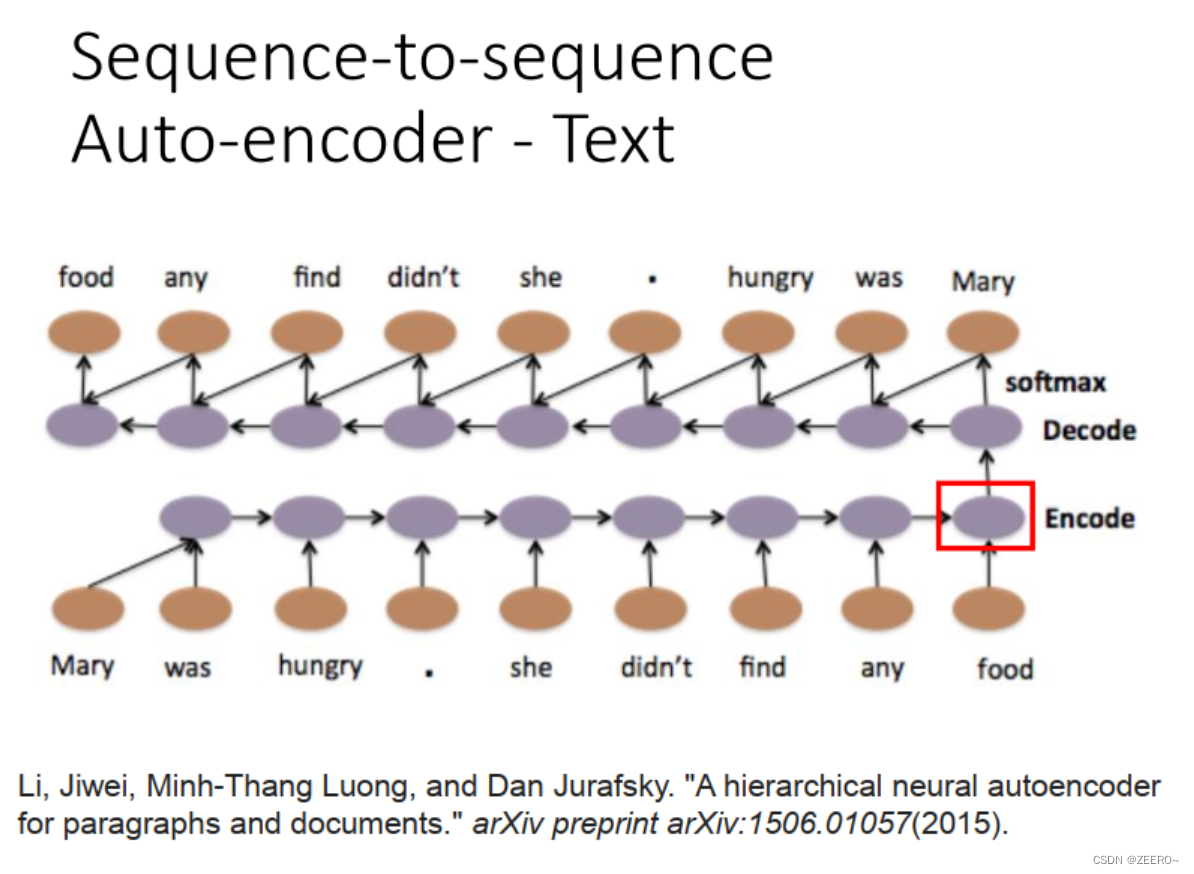
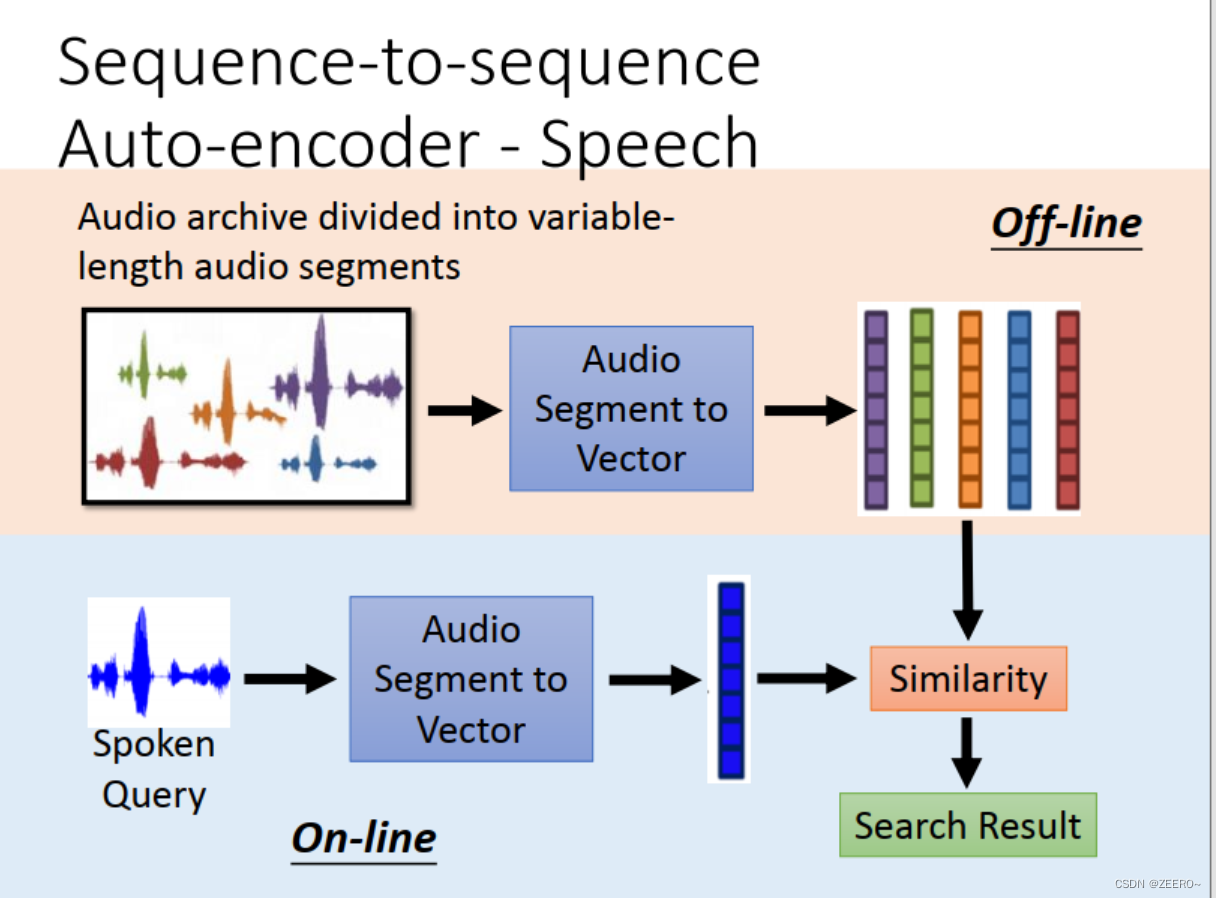
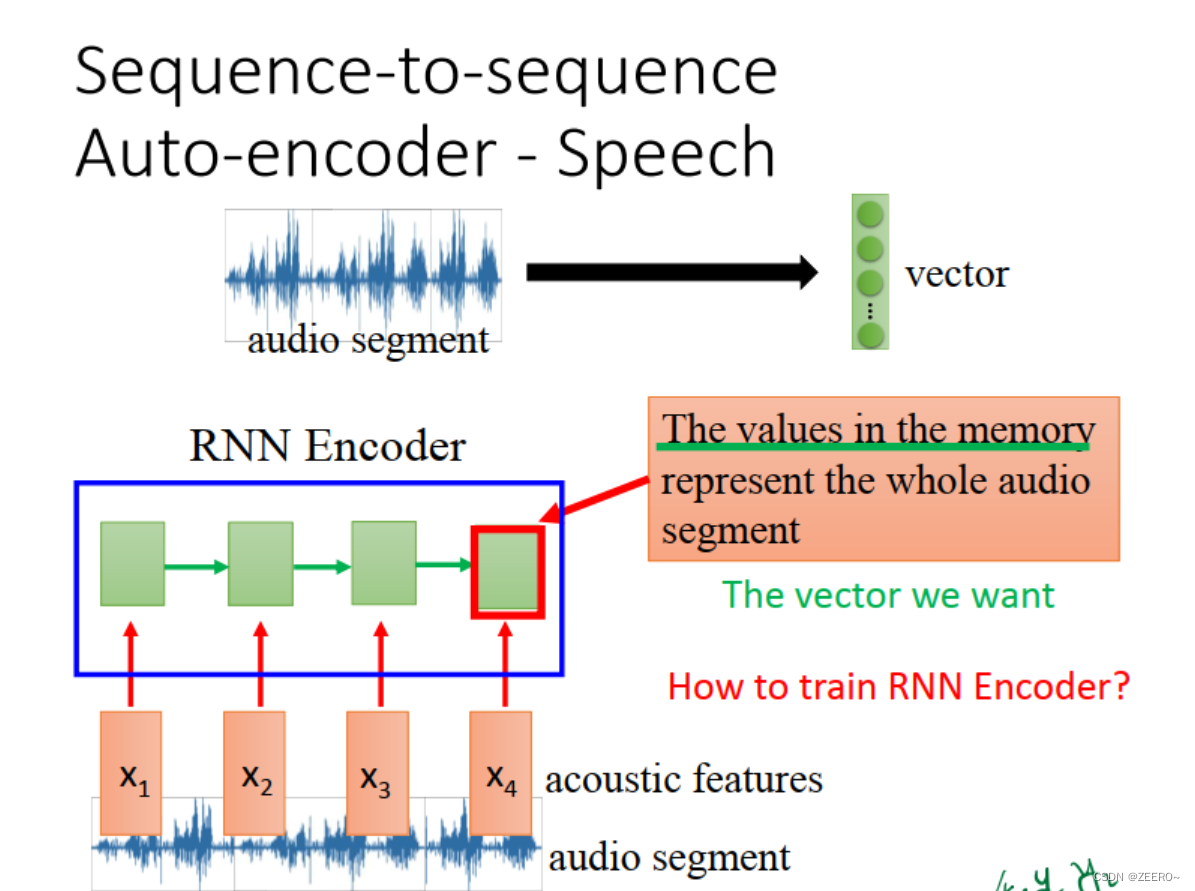
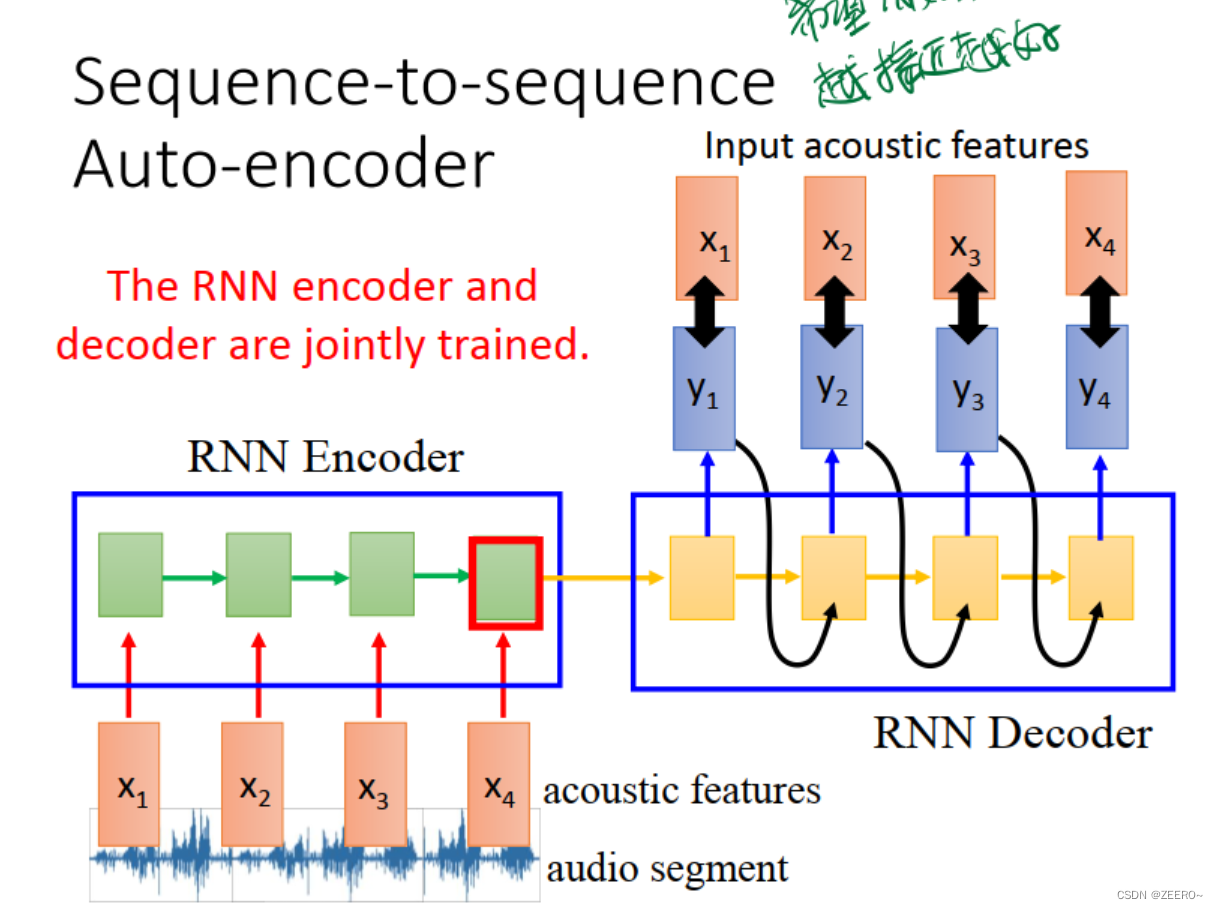
RNN与auto encoder和decoder
四、RNN和结构学习的区别
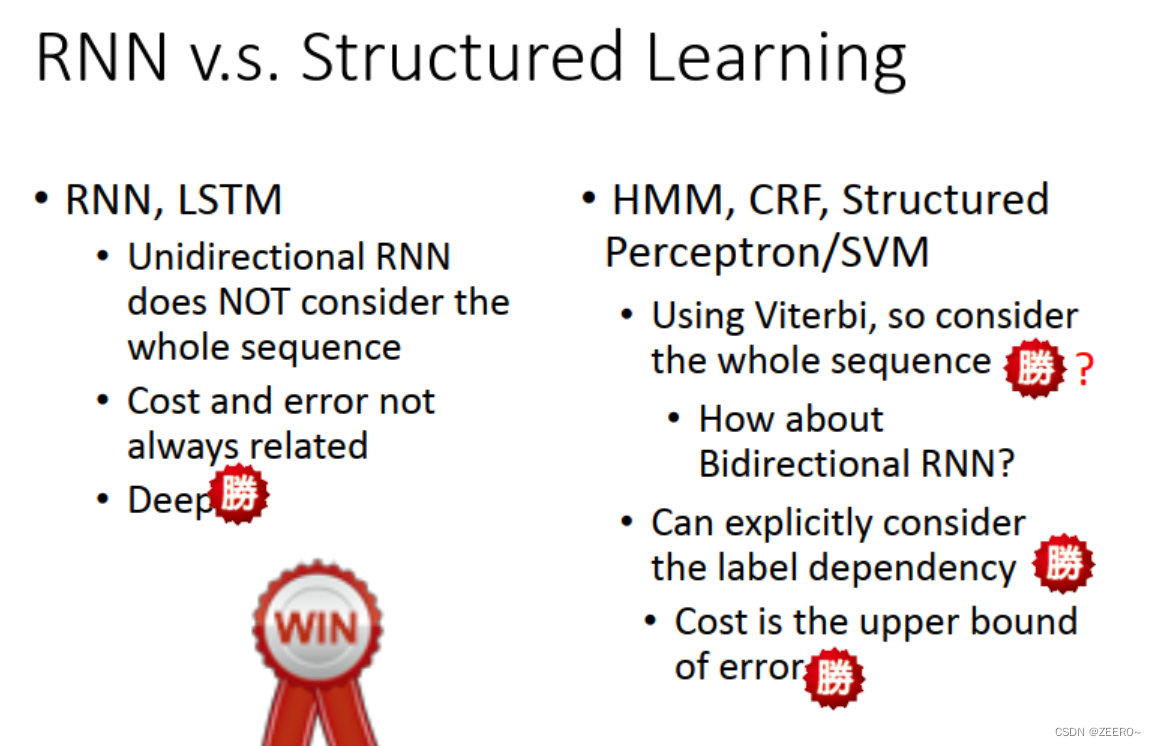
(1)从考虑上下文情况来看,单向RNN仅考虑到前文的信息,没有考虑到后文的信息。HMM如果使用viterbi算法的话,则同时考虑了整个sequence的信息。这里来看,结构学习似乎更有优势,但是,双向RNN也可以同时考虑整个sequence信息。
(2)RNN的cost和error是直接相关的,而结构学习并不是。cost往往高于error。
(3)最大的一个区别在于RNN可以deep,而结构学习在deep上则没有优势。
五、pytorch实现RNN与LSTM
回忆一下我们最简单的Elman RNN网络结构。
看下官方文档如何实现:
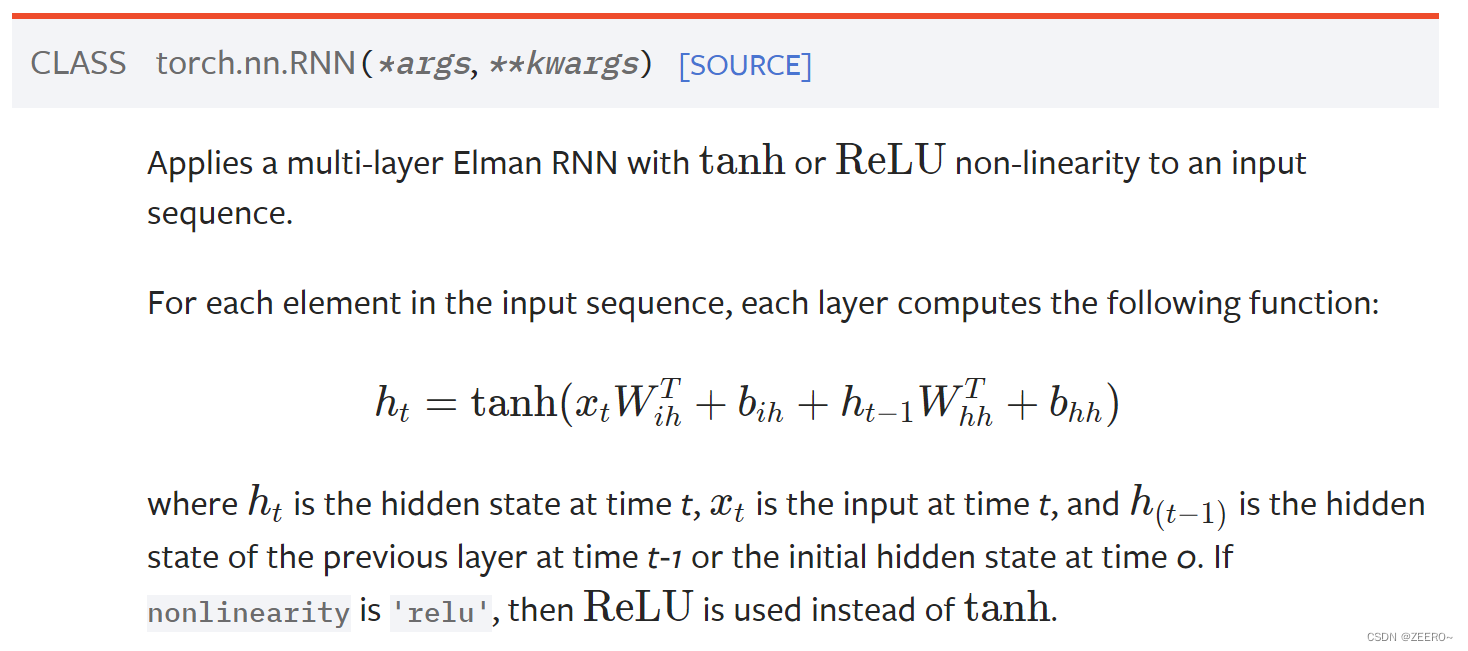
h
t
h_{t}
ht为当前时间t的hidden state。每一个time step,都会运行上面的公式。
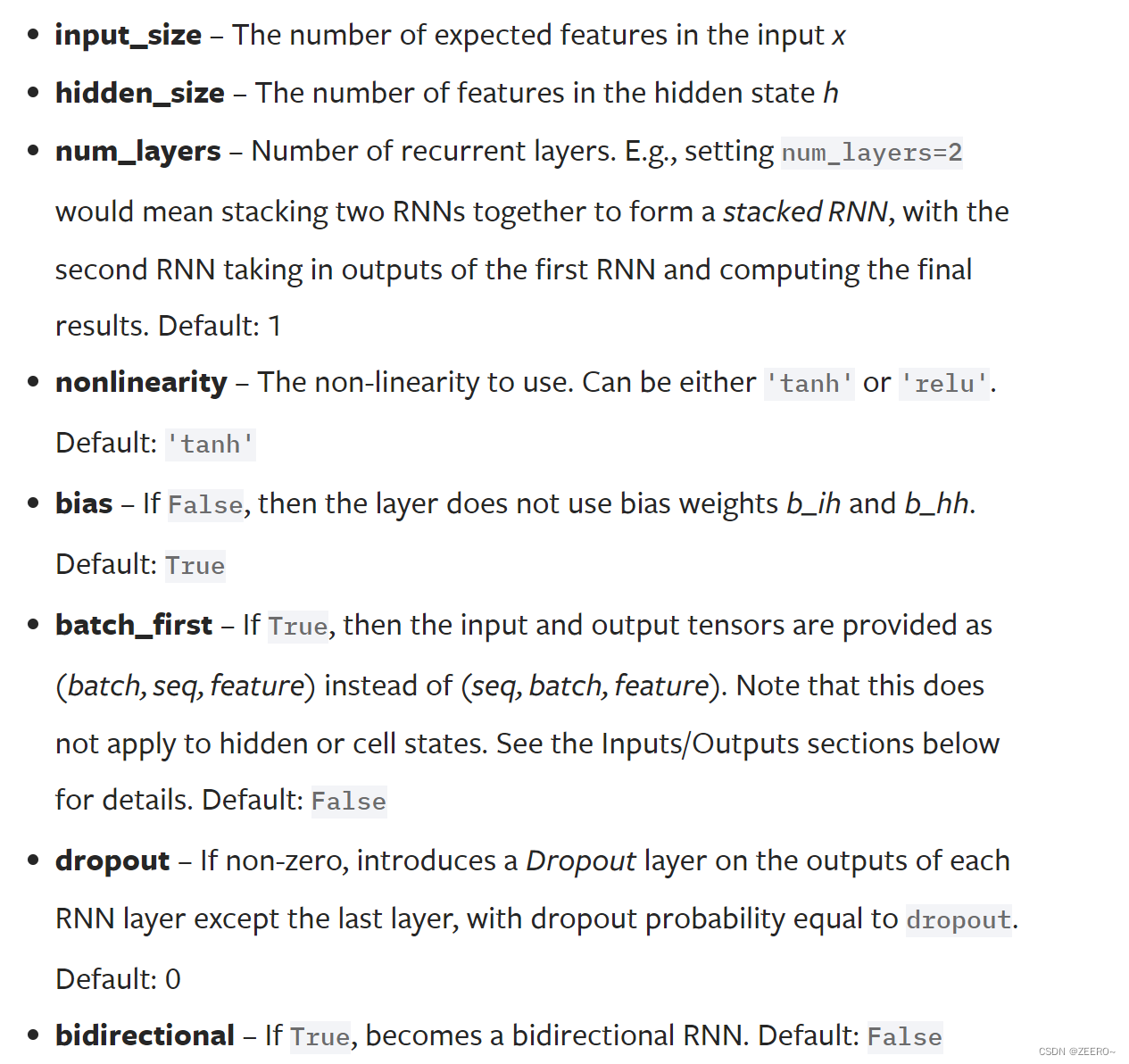
可接受的输入参数如图。
(1)input_size,表示特征向量的维度,即输入的特征是多少维的。。
(2)hidden_size,表示hidden state的特征维度。
(3)num_layers,表示RNN的层数
(4)batch_first,这个参数决定入参是(seq,batch,feature)的形式还是(batch,seq,feature)的形式。RNN仅规定了这2种入参形式,为了迎合不同人的喜好,因此设定了这个参数作为模式切换。
注意,这里默认是batch_first=False的状态。
(5)bidirectional,决定了该RNN是否为双向RNN。

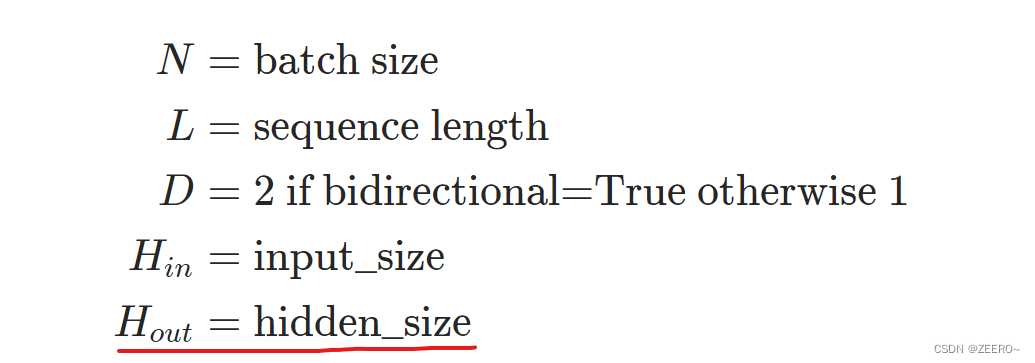
对于不使用batch的input来说,输入为
(
L
,
H
i
n
)
(L,H_{in})
(L,Hin)。L为序列的长度,
H
i
n
H_{in}
Hin为输入的特征维度
对于batch_first=True的来说,输入为
(
N
,
L
,
H
i
n
)
(N,L,H_{in})
(N,L,Hin),N为batch_size。
对于batch_first=False来说,输入为
(
L
,
N
,
H
i
n
)
(L,N,H_{in})
(L,N,Hin),N为batch_size。
h
0
h_{0}
h0则表示初始的隐藏层状态。如果是双向RNN,则D=2,否则D=1。形状为
(
D
∗
n
u
m
l
a
y
e
r
s
,
H
o
u
t
)
(D*num_layers,H_{out})
(D∗numlayers,Hout)。如果使用了batch,则形状为
(
D
∗
n
u
m
l
a
y
e
r
s
,
N
,
H
o
u
t
)
(D*num_layers,N,H_{out})
(D∗numlayers,N,Hout)
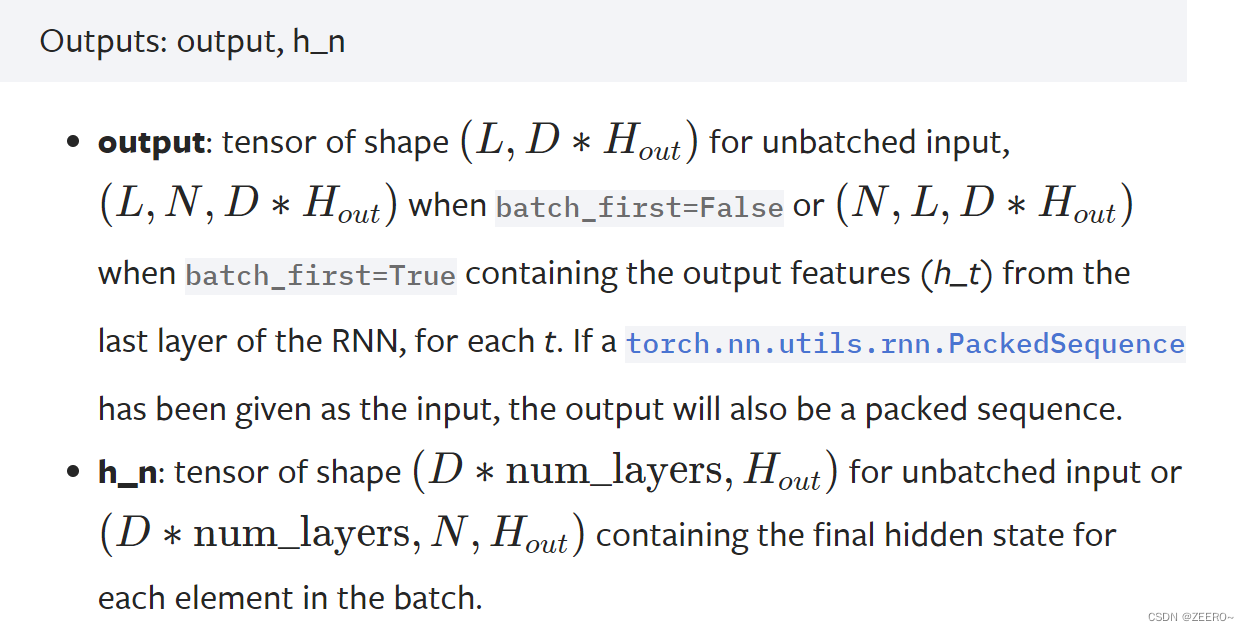
输出为所有时间步的输出和最后一个时间步的隐层状态。
对于batch_first=True的情况来说,输出形状为
(
N
,
L
,
D
∗
H
o
u
t
)
(N,L,D*H_{out})
(N,L,D∗Hout)。
h
n
h_{n}
hn为最后一个time step的隐藏层状态,输出形状为
(
D
∗
n
u
m
l
a
y
e
r
s
,
N
,
H
o
u
t
)
(D*num layers,N,H_{out})
(D∗numlayers,N,Hout)
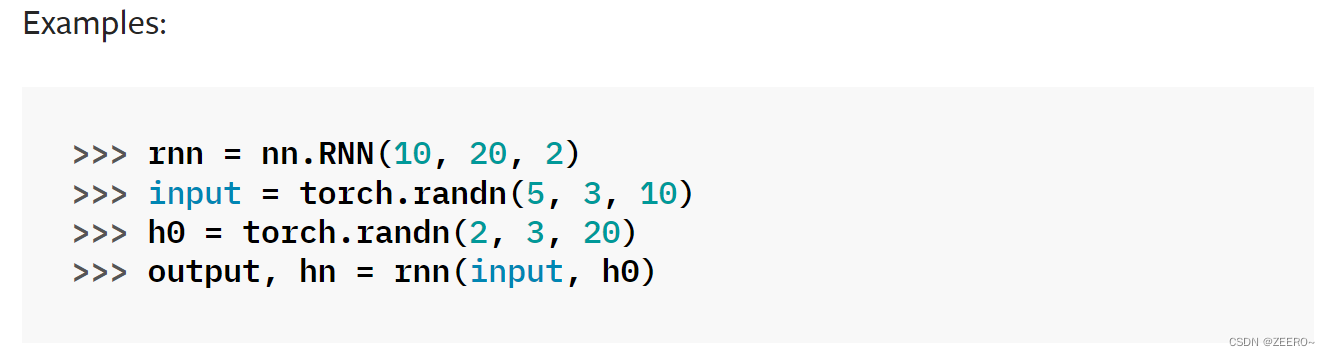
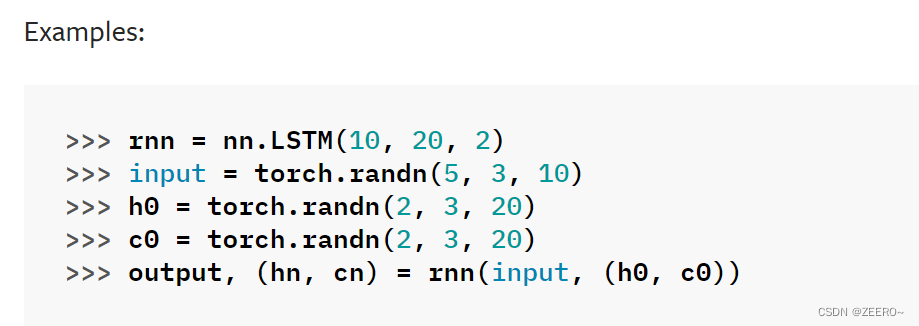
官方给的例子如下:
建立一个RNN,输入的特征维度为10,hidden_state维度为20,num_layers=2。
输入为,seq_len=5,batch_size=3,
H
i
n
=
10
。
H_{in}=10。
Hin=10。
初始隐藏层状态为num_layers=2,batch_size=3,H_out=20。
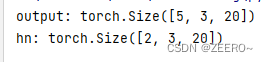
当然,这里估计有人就想问,output的维度
H
o
u
t
=
20
H_{out}=20
Hout=20,为什么会是20呢。别忘了,RNN的一个作用是可以进行分类。这里输出为20维的向量,通过torch.max()函数就可以获取预测的具体类别,也可以计算crossentropy。
另外提下,如果要将原始的数据转换成具有batch_size的形式,直接使用tensor自带的reshape函数即可。
至于nn.lstm模块,和nn.RNN模块大同小异,几乎可以直接copy过来。
5.1为何 H o u t = h i d d e n s i z e H_{out}=hidden_size Hout=hiddensize?
这里在看官方文档时,注意到了一个问题。
这里,一般来说,nn.RNN的输出并不是我们最后所得到的分类或回归的1个值。而是隐藏层变量的输出,作为下一个time step的输入。所以2者是相等的。
num_layers表示RNN堆叠的层数。
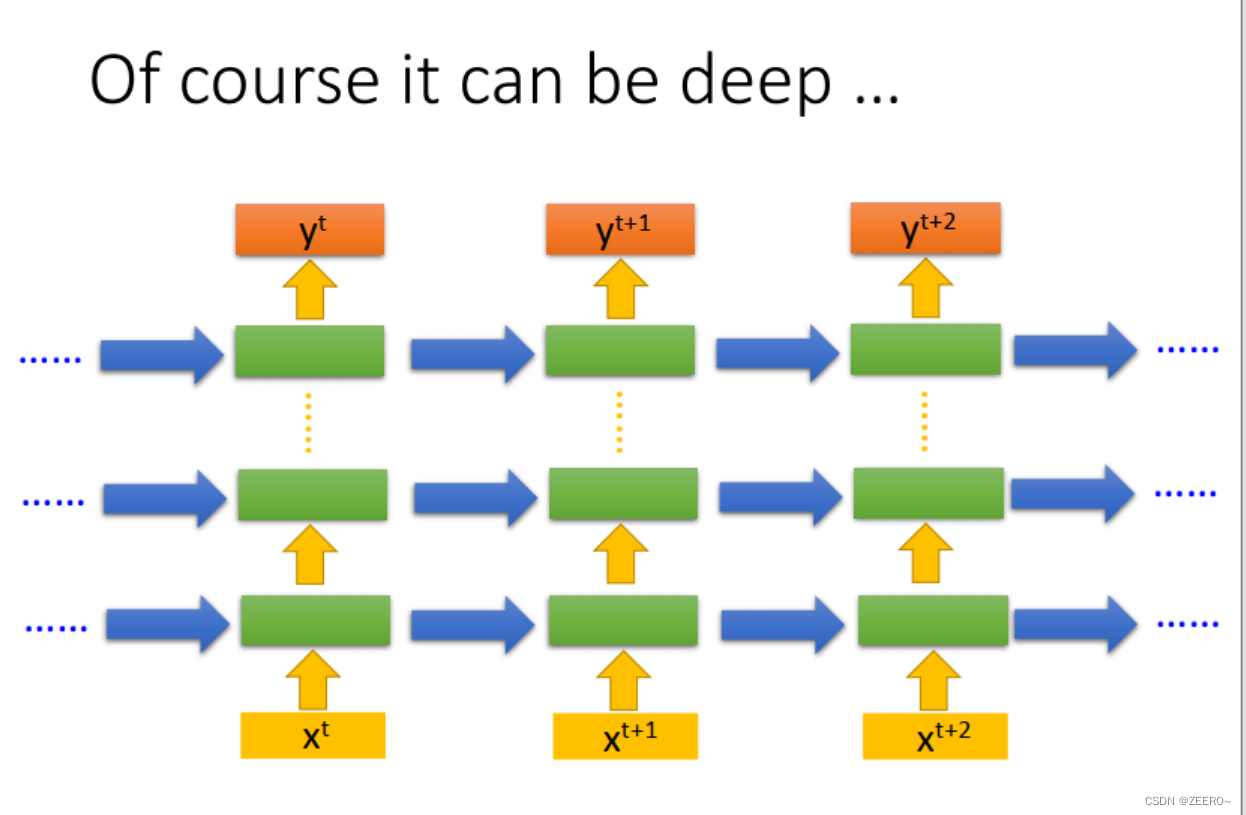
例如说如图所示情况下,假如忽略中间的竖直的省略号,则num_layers=3。普通情况下,双向RNN则num_layers也等于2.
5.2 LSTM的实现
前面讲LSTM的实现与RNN大同小异,其实还是有些区别的。来重点看下区别。
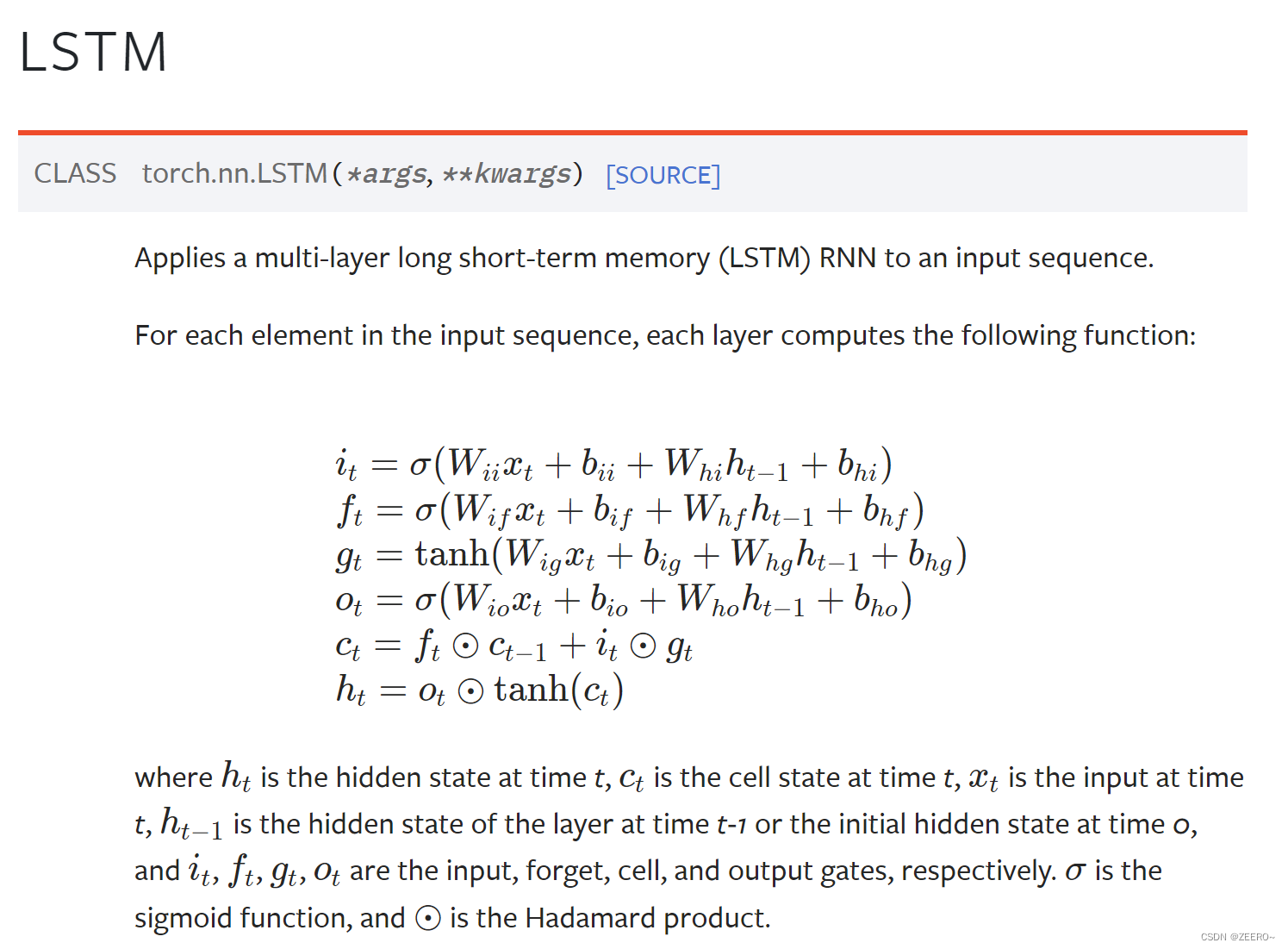
前面的定义就不细讲,通过前面的内容,肯定是可以理解上述的这些公式的。
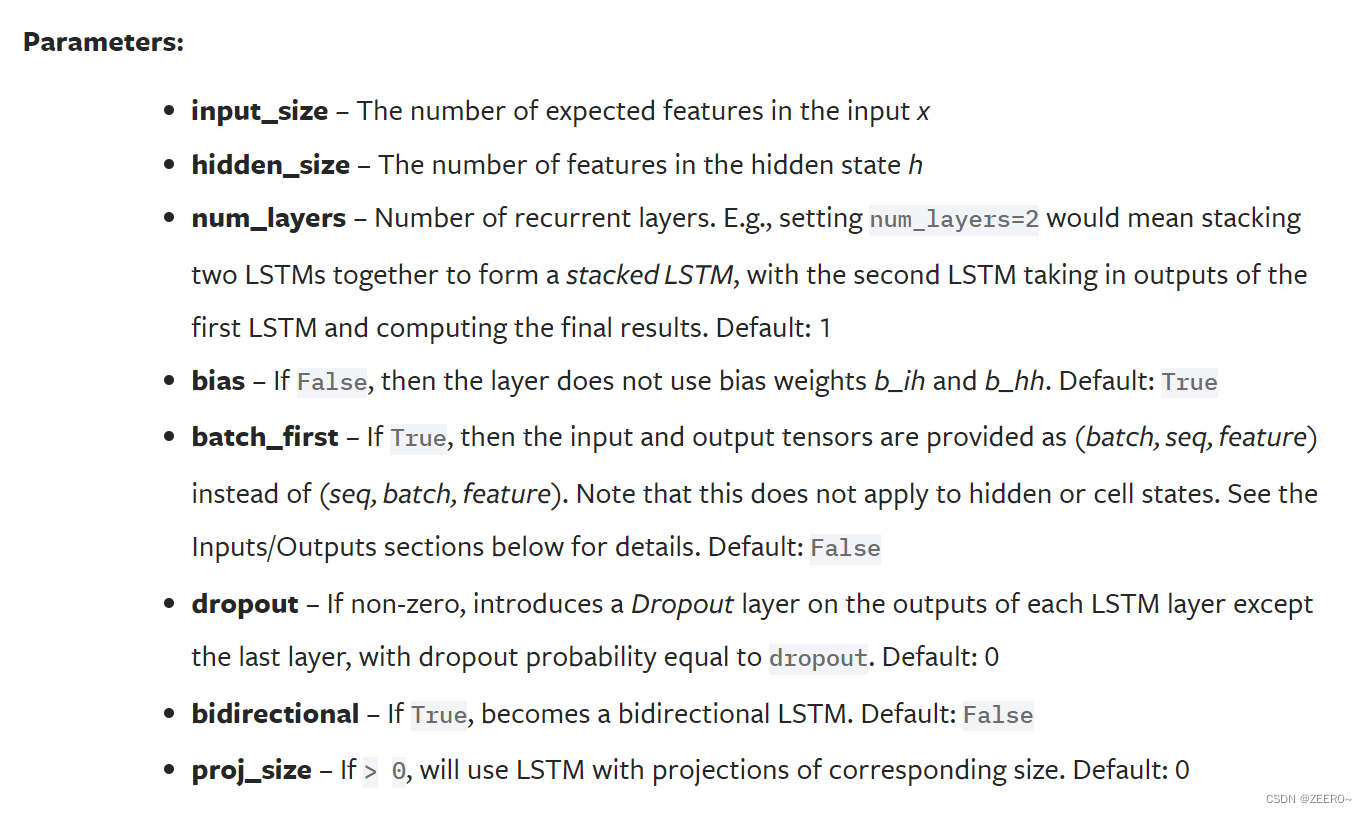
定义的参数和RNN几乎没有任何区别,input_size还是表示输入特征的维度,hidden_size表示隐藏层的维度,num_layers表示网络层数等。最后多了一个proj_size,一般也用不太上。
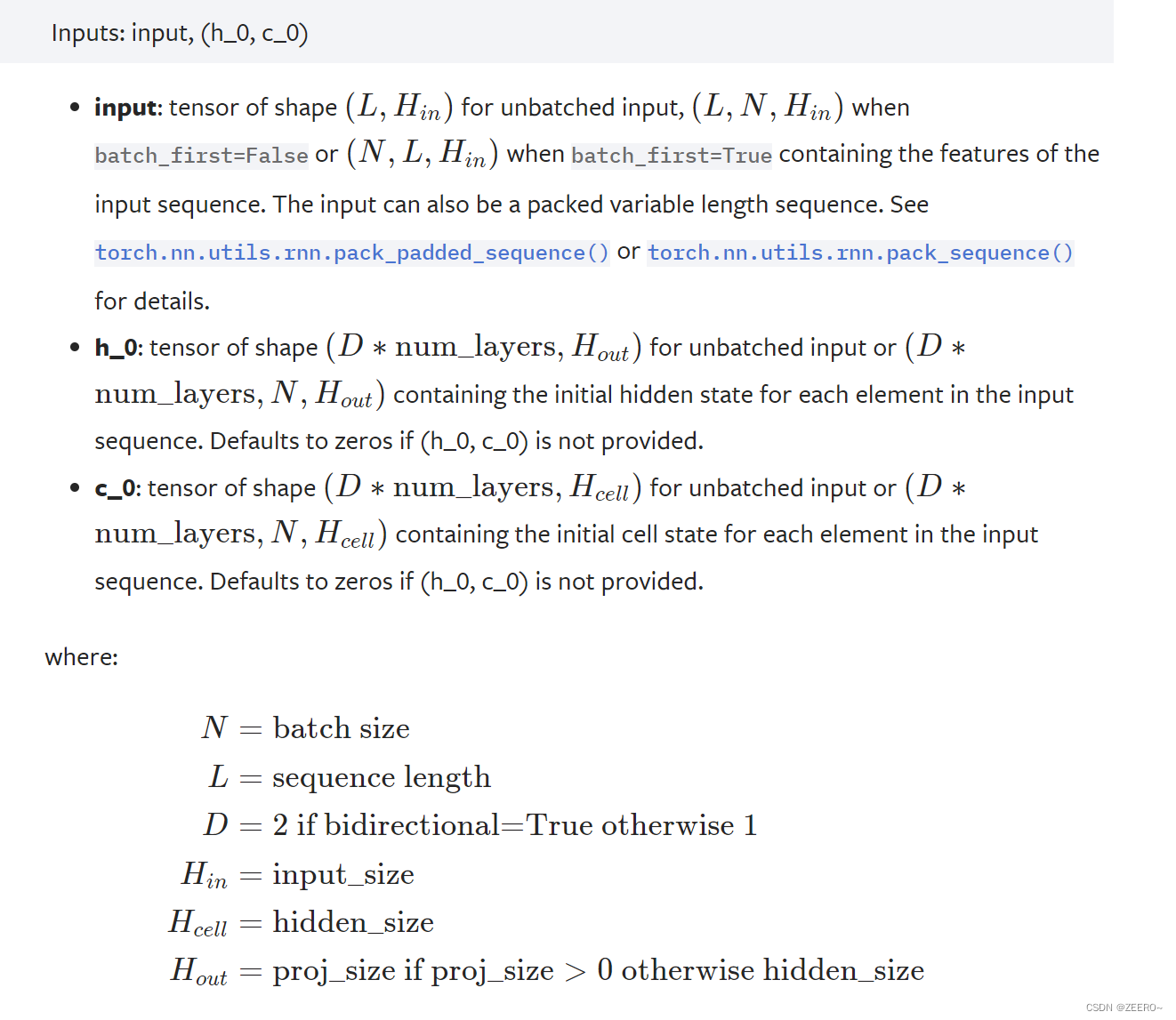
网络参数的输入,有些区别,多了初始的隐藏层状态h0和c0,在RNN中只有h0。
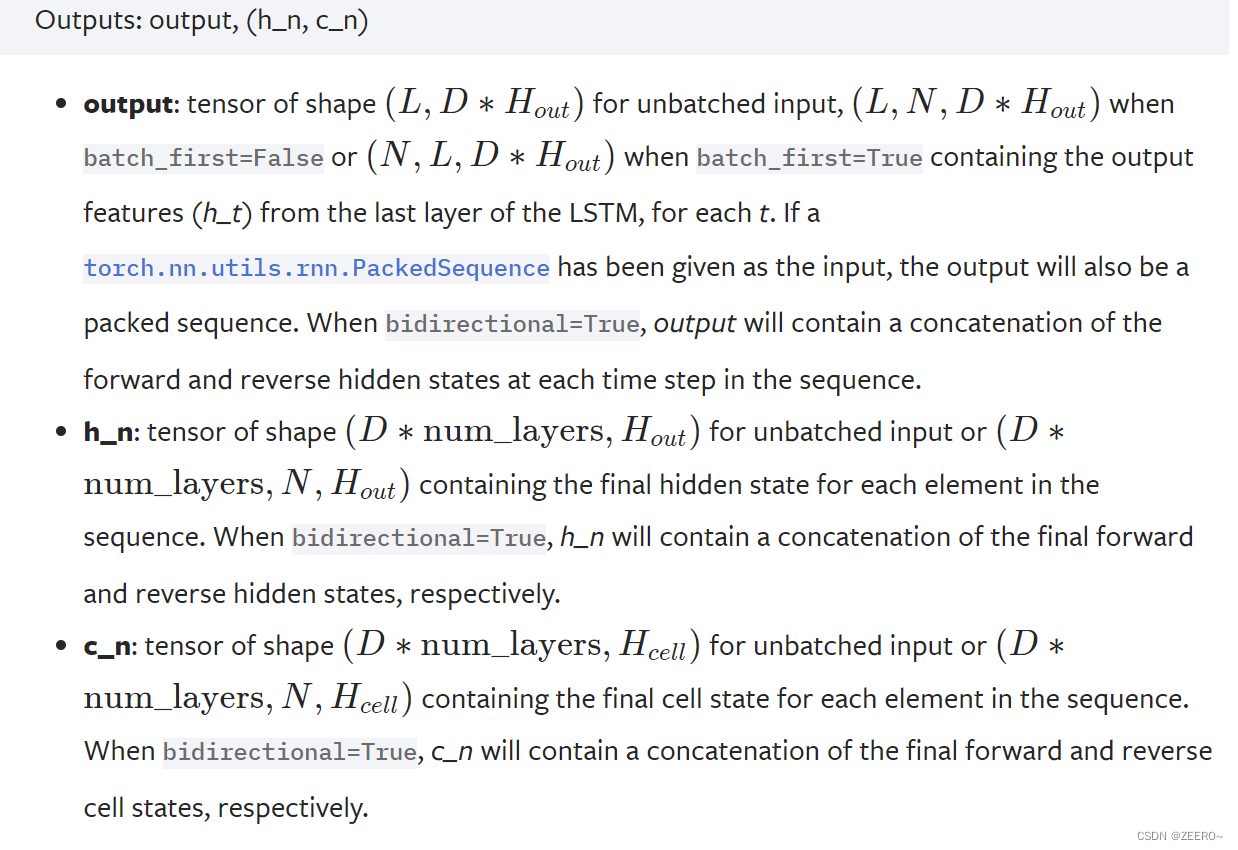
output相比也知识多了一个c_n。
六、训练RNN时如何处理单步预测模型和多步预测问题
单步预测,指的是每个timestep都有一个对应的输出。
多步预测,指的是只在seq的最后一个再有输出值。
class LSTMModel(nn.Module):
def __init__(self, input_dim, hidden_dim, output_dim):
super(LSTMModel, self).__init__()
self.hidden_dim = hidden_dim
self.lstm = nn.LSTM(input_dim, hidden_dim, batch_first=True) # 分别表示输入x的特征维度和中间隐藏层的特征维度
self.linear = nn.Linear(hidden_dim, output_dim)
def forward(self, input): # batch_first=True。x严格按照batch_size,seq_len,feature的形式进行排列
batch_size = input.size(0)
seq_len = input.size(0)
hidden_state = torch.zeros(1, batch_size, self.hidden_dim)
cell_state = torch.zeros(1, batch_size, self.hidden_dim)
output_seq, _ = self.lstm(input, (hidden_state, cell_state)) # 第2个为最后一个时间步的隐藏状态,output格式为[N,L,N*Hout],这里hidden_state,cell_state也可以直接省略。
# 上述三行代码可以等价于 output_seq,_=self.lstm(input)。第二个输出 ‘_’不可以省略
# last_hidden_state = output_seq[:, -1, :] #返回一个[N,1]的数据
output = self.linear(output_seq) # output size =[N,L,1]
return output
区别就在于是否要注释中间那一行。在多步预测过程中,需要取1个batch_size中的每个seq_len的最后一个数值。
lstm实现二分类实例
import scipy.io as io
import numpy as np
import torch
import torch.nn as nn
from torch.utils.data import Dataset, TensorDataset, DataLoader
import matplotlib.pyplot as plt
from sklearn.preprocessing import StandardScaler, MinMaxScaler
from sklearn.model_selection import train_test_split
from sklearn.metrics import mean_squared_error, r2_score, make_scorer
from xgboost import XGBRegressor
from sklearn.model_selection import learning_curve
from sklearn.ensemble import RandomForestRegressor
import joblib
import warnings
from sklearn.preprocessing import LabelEncoder
from sklearn.metrics import accuracy_score
warnings.filterwarnings('ignore')
print(torch.__version__)
class LSTMModel(nn.Module):
def __init__(self, input_dim, hidden_dim, output_dim):
super(LSTMModel, self).__init__()
self.hidden_dim = hidden_dim
self.lstm = nn.LSTM(input_dim, hidden_dim, batch_first=True) # 分别表示输入x的特征维度和中间隐藏层的特征维度
self.linear = nn.Linear(hidden_dim, output_dim)
self.softmax = nn.Softmax(dim=2) # dim=1表示沿着第2个维度列进行处理,nn.softmax函数通常将一个向量转换为概率分布
def forward(self, input): # batch_first=True。x严格按照batch_size,seq_len,feature的形式进行排列
batch_size = input.size(0)
seq_len = input.size(1)
hidden_state = torch.zeros(1, batch_size, self.hidden_dim)
cell_state = torch.zeros(1, batch_size, self.hidden_dim)
output_seq, _ = self.lstm(input, (hidden_state, cell_state)) # 第2个为最后一个时间步的隐藏状态,output格式为[N,L,N*Hout]
# last_hidden_state = output_seq[:, -1, :] # 返回一个[L,N*Hout]的数据,多步预测的时候可以进行切换
output = self.linear(output_seq) # output size =[N,L,1]
output = self.softmax(output)
return output
class Config:
data_file = '../dataset/fusion_feature_zscore.mat'
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
print(device.type)
batch_size = 16
lr = 5e-2
epochs = 150
class Trainer:
def __init__(self, cfg: Config):
self.x, self.y = self.read_data(cfg.data_file)
self.train_x, self.test_x, self.train_y, self.test_y = train_test_split(self.x, self.y, test_size=0.2,
shuffle=True, random_state=42)
self.train_x = torch.from_numpy(self.train_x).float().to(cfg.device)
self.test_x = torch.from_numpy(self.test_x).float().to(cfg.device)
self.train_y = torch.from_numpy(self.train_y).float().to(cfg.device)
self.test_y = torch.from_numpy(self.test_y).float().to(cfg.device)
train_dataset = TensorDataset(self.train_x, self.train_y)
self.train_dataloader = DataLoader(train_dataset, batch_size=cfg.batch_size)
self.input_dim = 6
self.hidden_dim = 32
self.output_dim = 2
self.model = LSTMModel(self.input_dim, self.hidden_dim, self.output_dim)
self.model.to(cfg.device)
self.optimizer = torch.optim.Adam(self.model.parameters(), lr=cfg.lr)
self.lr_scheduler = torch.optim.lr_scheduler.StepLR(self.optimizer, step_size=50, gamma=0.2)
self.loss_fn = nn.CrossEntropyLoss()
self.epochs = cfg.epochs
def read_data(self, file):
mat = io.loadmat(file)
csv_data = mat['feature']
x = csv_data[:, 1:-1]
y = csv_data[:, -1:]
self.scaler_x = StandardScaler()
x = self.scaler_x.fit_transform(x)
LE = LabelEncoder()
y = LE.fit_transform(y)
self.seq_len = 5
self.feature_dim = 6
self.label_dim = 1
# 设置seq_len=5,因此需要将x,和y分别转换为[-1,5,6]的形式
n_seq = x.shape[0] // self.seq_len # n_seq表示一共可以生成多少个这样的序列
x = x[:n_seq * self.seq_len, :]
y = y[:n_seq * self.seq_len]
x = np.reshape(x, (n_seq, self.seq_len, self.feature_dim))
y = np.reshape(y, (n_seq, self.seq_len, self.label_dim))
return x, y
def train(self):
self.model.train() # 将model设置为训练模式
total_loss = 0
for batch_data in self.train_dataloader:
self.optimizer.zero_grad()
pre = self.model(batch_data[0])
true0 = batch_data[1].squeeze()
pre = pre.view(-1, 2)
true = true0.view(-1).long()
loss = self.loss_fn(pre, true)
loss.backward()
# 将梯度信息打印出来
max_grad_norm = 1.0
torch.nn.utils.clip_grad_norm_(self.model.parameters(), max_grad_norm)
self.optimizer.step()
total_loss += loss.item()
return total_loss / len(self.train_dataloader)
@torch.no_grad()
def eval(self):
test_pred = self.model(self.test_x).cpu()
_, predicted = torch.max(test_pred, 2)
train_pred = self.model(self.train_x).cpu().numpy()
predicted = predicted.view(-1).numpy()
true = self.test_y.view(-1).numpy()
return accuracy_score(true, predicted)
def run1(self):
for epoch in range(self.epochs):
train_loss = self.train()
metrics = self.eval()
print(
f'Epoch: [{epoch + 1:3d}|{self.epochs}],'
f'train loss:{train_loss:.4f}'
f'train accuracy: {metrics:.4f},'
)
self.lr_scheduler.step()
def main():
cfg = Config()
T = Trainer(cfg)
T.run1()
if __name__ == '__main__':
main()
如何计算lstm层的网络参数量
拿上面的二分类为例
class LSTMModel(nn.Module):
def __init__(self, input_dim, hidden_dim, output_dim):
super(LSTMModel, self).__init__()
self.hidden_dim = hidden_dim
self.lstm = nn.LSTM(input_dim, hidden_dim, batch_first=True) # 分别表示输入x的特征维度和中间隐藏层的特征维度
self.linear = nn.Linear(hidden_dim, output_dim)
self.softmax = nn.Softmax(dim=2) # dim=1表示沿着第2个维度列进行处理,nn.softmax函数通常将一个向量转换为概率分布
def forward(self, input): # batch_first=True。x严格按照batch_size,seq_len,feature的形式进行排列
batch_size = input.size(0)
seq_len = input.size(1)
output_seq, _ = self.lstm(input) # 第2个为最后一个时间步的隐藏状态,output格式为[N,L,N*Hout]
# last_hidden_state = output_seq[:, -1, :] # 返回一个[L,N*Hout]的数据,多步预测的时候可以进行切换
output = self.linear(output_seq) # output size =[N,L,1]
output = self.softmax(output)
return output
if __name__ == '__main__':
model=LSTMModel(6, 32, 2)
print(f'model params size: {sum(p.numel() for p in model.parameters()) :.6f} ')
print(model)
# output
'''
model params size: 5186
LSTMModel(
(lstm): LSTM(6, 32, batch_first=True)
(linear): Linear(in_features=32, out_features=2, bias=True)
(softmax): Softmax(dim=2)
)
可以看到模型参数量为0.004946*1024*1024=5186个参数
'''
这里的5186是如何计算出来的呢,我们来看下官方文档给的公式
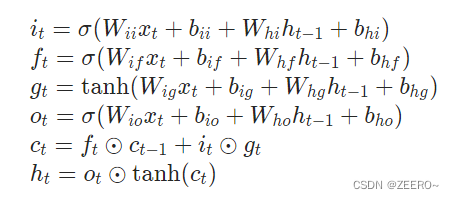
以上述为例,
x
t
x_{t}
xt的形状为(6,1),
h
t
−
1
h_{t-1}
ht−1和
h
t
h_{t}
ht的形状为(32,1),上述所有跟
x
t
x_{t}
xt相乘的W的形状都为(32,6),所有跟
h
t
h_{t}
ht相乘的W的形状都为(32,32)。后接的偏置b保持相同的形状。其中所有的激活函数都不占参数量。因此,一个LSTM层的参数量为
4
∗
(
32
∗
6
+
32
+
32
∗
32
+
32
)
=
5120
4*(32*6+32+32*32+32)=5120
4∗(32∗6+32+32∗32+32)=5120
备注:只有前4个公式才有参数量,所有参数量都储存在W和b中,且4个公式的参数量一模一样。
最后再加上[32,2]的网络参数量,总参数量为
5120
+
32
∗
2
+
32
=
5186
5120+32*2+32=5186
5120+32∗2+32=5186
LSTM的网络参数量与序列长度无关,上述可以总结为公式,假设输入特征维度为m,输出特征维度为n,则一层LSTM的网络参数量为
4*[(n+1)*m+(n+1)*n]=4*(n+1)*(m+n)
7、LSTM网络结构可视化
对于LSTM网络结构,我们如何知道其内部运行的规律呢?如何知道当前时间步的输出是怎么样利用前面时间段的信息呢?我们可以通过可视化的方式将其展示出来。
以上。















 582
582











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









