






01 - matlab 点云工具箱(Point cloud tools for Matlab)配置
0 引言
本篇介绍点云的有关基本概念和Matlab点云工具箱的获取、配置过程。
1 点云基本概念概述
1.1 基本概念
点云是由一组离散的点组成的数据集合,每个点都有一个位置坐标和可能的其他属性,如颜色、法向量、曲率等。点云可以用来表示三维空间中的物体表面的形状,可以从不同的传感器(如激光扫描仪、RGB-D相机、结构光等)获得。
点云具有以下特点:
1. 无序性:点云中的点没有固定的顺序,它们可以按照任意顺序进行处理和表示。
2. 稀疏性:点云中的点通常只覆盖物体表面的一小部分,而大部分区域可能是空白的。
3. 可变性:点云的大小和密度可以根据需要进行调整,这取决于数据采集的方式和采样的精度。
4. 多样性:点云可以表示不同类型的物体,从简单的几何体到复杂的自然场景。
点云在计算机图形学、计算机视觉和机器学习等领域有着广泛的应用。在计算机图形学中,点云可以用于三维建模、渲染和动画等方面;在计算机视觉中,点云可以用于目标检测、物体识别和场景分析等任务;在机器学习中,点云可以用于训练和测试深度学习算法,如点云分割、点云生成和点云分类等任务。
点云处理的主要任务包括数据预处理、特征提取、物体分割、场景重建和可视化等。数据预处理包括点云去噪、采样和对齐等;特征提取包括计算点的法向量、曲率和描述子等;物体分割包括将点云分割成不同的物体或部分;场景重建包括将点云转换为三维模型或生成三维重建结果;可视化包括将点云可视化为图像或三维模型。
1.2 点云数据处理步骤概述
点云数据处理是指对采集到的点云数据进行预处理、分析、建模等一系列操作,以获取有用的信息和进行后续的应用。其主要步骤如下:
1) 数据采集:使用激光扫描仪、摄像头等设备对物体或场景进行扫描,获取点云数据。
2) 数据预处理:对采集到的点云数据进行预处理,包括去噪、滤波、降采样等操作,以提高数据质量和减少存储空间。
3) 特征提取:根据应用需求,从点云数据中提取出相关的特征,如法向量、曲率、表面特征等,以描述物体的形状、纹理等信息。
4) 数据分割与配准:将点云数据根据不同的对象或区域进行分割,以便进一步的处理。同时,对分割后的点云数据进行配准,以将多个采集到的点云数据进行拼接或对齐。
5) 点云重建与网格化:根据点云数据,进行表面重建,生成连续的三维模型。常用的方法包括体素化、三角网格化等。
6) 模型分析与处理:对生成的三维模型进行分析和处理,如拓扑分析、材质贴图、尺寸测量等。
7) 数据可视化与展示:将处理后的点云数据或三维模型进行可视化展示,以便用户对场景或物体进行观察和分析。常见的可视化方式包括点云渲染、体素渲染、三维模型渲染等。
8) 应用与决策:根据点云数据处理的结果,进行相应的应用和决策,如机器人导航、三维建模、虚拟现实等。
需要注意的是,点云数据处理的具体步骤和方法取决于应用需求和数据的特点,在实际操作中可能会有所变化。
1.3 点云数据分类
点云数据格式可以分为以下几类:
1) XYZ 格式:最简单的点云数据格式,每个点由三个坐标值 (X, Y, Z) 组成。
2) XYZRGB 格式:在 XYZ 格式的基础上,每个点还包含了三个颜色值 (R, G, B)。
3) XYZI 格式:在 XYZ 格式的基础上,每个点还包含了一个 Intensity 值,用来表示点的亮度或反射强度。
4) XYZRGBN 格式:在 XYZRGB 格式的基础上,每个点还包含了三个法向量值 (Nx, Ny, Nz)。法向量用来表示点云中每个点的表面法线方向。
5) PLY 格式:一种通用的点云数据格式,可以存储点的坐标、颜色、法向量等信息。
6) PCD 格式:PointCloud Data 格式,是 Point Cloud Library (PCL) 中常用的点云数据格式。可以存储点的坐标、颜色、法向量、强度等信息。
7) LAS/LAZ 格式:一种常用的激光雷达数据格式,用于存储点云数据。LAS 格式存储点的坐标、颜色、法向量等信息,LAZ 格式是 LAS 格式的压缩版本。
8) OBJ 格式:一种常用的三维模型文件格式,可以存储点云数据。OBJ 格式通常用于存储完整的三维模型,但也可以用来存储点云数据。
除了上述几种格式,还有许多其他的点云数据格式,如BIN、ASC、Mat等。选择合适的点云数据格式应根据具体的需求和使用场景来决定。点云数据格式可以分为以下几类:
2 Matlab点云工具箱获取配置
2.1 Matlab点云工具箱
Matlab点云工具箱(链接Point cloud tools for Matlab)主要用于处理、可视化和分析点云数据,该工具箱提供了丰富的函数和工具集,可以通过简单的命令和函数调用完成点云处理任务。同时,Matlab作为一个通用的编程环境,还可以与其他Matlab工具箱和函数库进行无缝集成,提供更灵活、高效的点云处理解决方案。点云工具箱提供了丰富的功能和算法,包括:
-
点云读取和保存:可以读取和保存常见的点云数据格式,如PLY、PCD等。 -
点云预处理:包括滤波、采样、去噪、重采样等操作,用于清理和简化点云数据。 -
点云可视化:可以将点云数据以三维点云或二维深度图像的形式显示出来,并支持交互式操作。 -
点云配准:可以利用ICP(Iterative Closest Point)算法将多个点云对齐,以实现点云拼接和对齐。 -
点云分割:可以基于几何特征或颜色特征对点云进行分割,提取出不同的物体或区域。 -
点云特征提取:可以提取点云的几何特征,如法向量、曲率等,用于描述点云的形状和结构。 -
点云配准和重建:可以进行三维配准和重建操作,包括三维重建、三维重建配准、三维配准以及三维建模等。 -
点云分类和识别:可以使用机器学习算法对点云进行分类和识别,如支持向量机、随机森林等。
2.1 Matlab点云工具箱配置及简单使用
如果使用的是较新版本的matlab,Matlab点云工具箱会被自动安装在Matlab的安装目录的“Toolbox”下,无需进行下面配置,可直接使用点云工具箱的各种功能。
1. Matlab点云工具箱获取地址为(Point cloud tools for Matlab),点击进入下面工具箱获取界面,然后点击红色框选区域获取Point cloud tools for Matlab的压缩包;
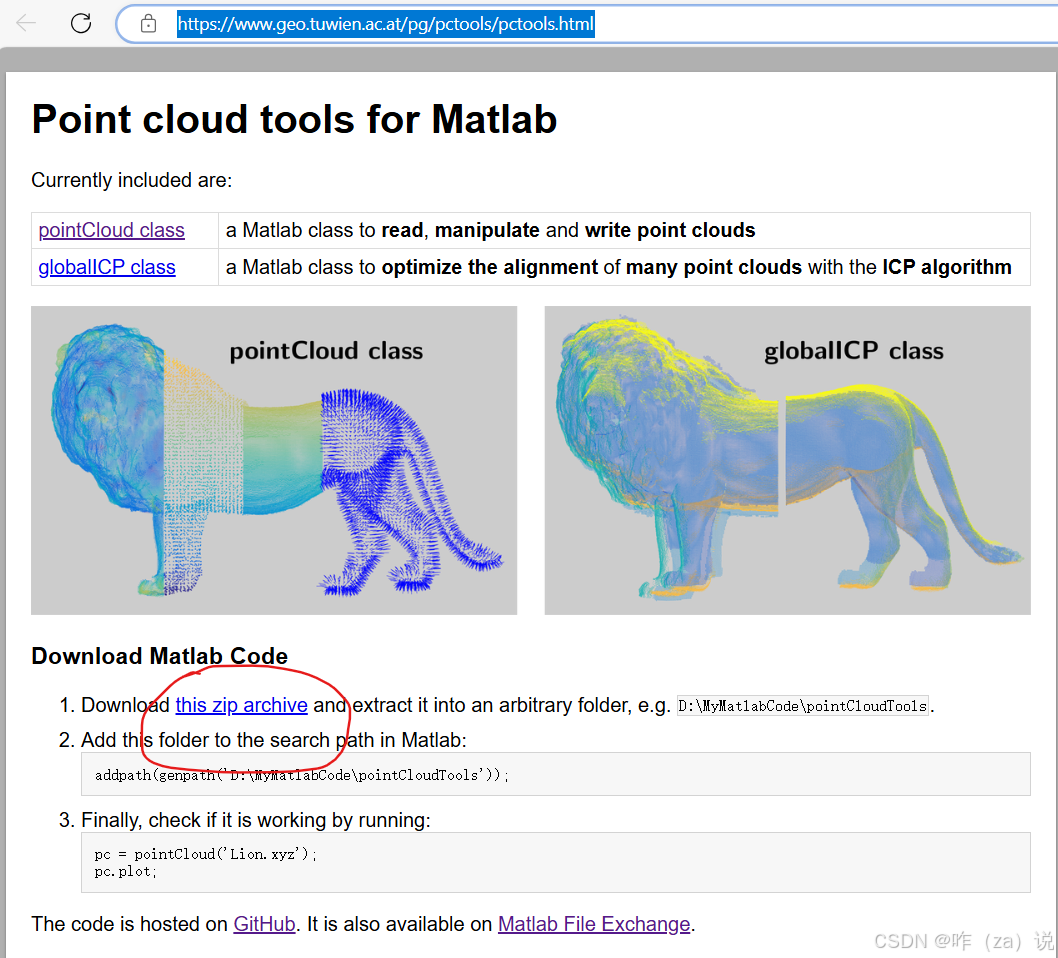
注:点击页面链接(框选区域)可能会出现无响应的情况,可多次尝试,也可在资源中获取。
💦💦💦💦💦
2. 解压缩文件,能够看到下图文件结构,其中“demodata”中为示例数据、“functions”中为基本函数;

💦💦💦💦💦
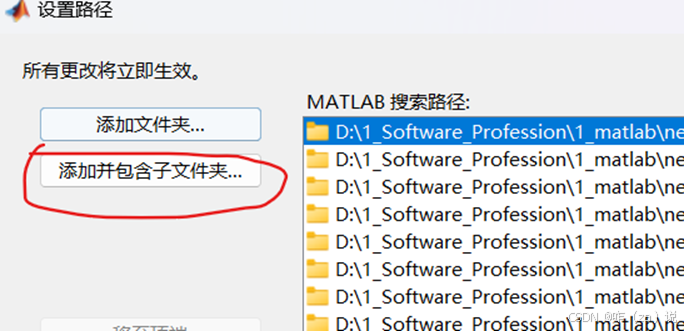
3. 将工具箱配置到matlab中:可以手动添加,在matlab中找到 主页 - 设置路径,进入下图页面,然后将解压缩的路径,选择添加到框选区域,可以看到路径中的所有文件夹都被加载到Matlab的环境中了;
也可以执行下面语句进行自动添加设置路径;
addpath(genpath('....\Point_cloud_tools_for_Matlab-master'));
💦💦💦💦💦
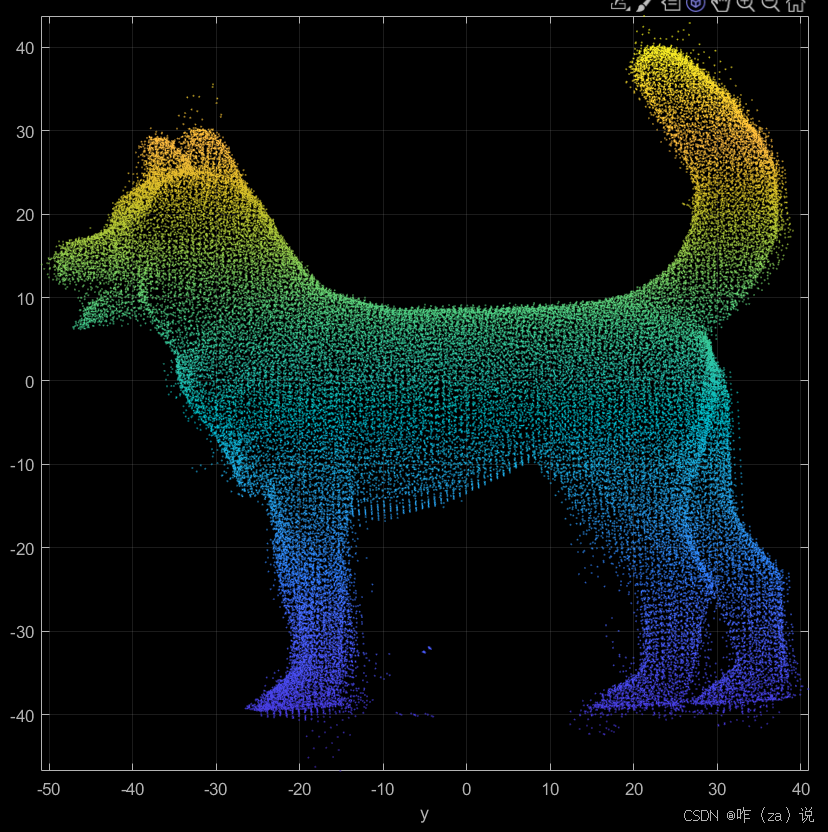
4. 路径配置完成后就可以加载一个点云数据看看效果了,执行下面语句:
pc = pointCloud('dog.xyz');
pc.plot
执行结果:
3 结语
通过以上内容,简单了解了点云是什么?进行点云数据处理需要哪些过程?配置好了点云工具箱,方便对后续每个功能和过程进行学习。
💦💦💦💦💦
😜
😜😜
😜😜😜😜


















 1819
1819

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











