







1.这里默认已经安装好了VMware
2.RK3588使用的模型类型是rknn,需要先在PC端转成rknn类型后再在RK3588上运行
目录
一、安装Ubuntu
1. 新建虚拟机
1.1 Ubuntu镜像下载地址:
官方地址(超慢):https://ubuntu.com/download
百度云(只有18.04):https://pan.baidu.com/s/1yzsTqK_vu2zi41Z6dtoZfQ
提取码:TaTa
阿里云开源镜像站:https://mirrors.aliyun.com/oldubuntu-releases/releases/
某不知名镜像网站:http://mirrors.melbourne.co.uk/ubuntu-releases/
1.2创建虚拟机
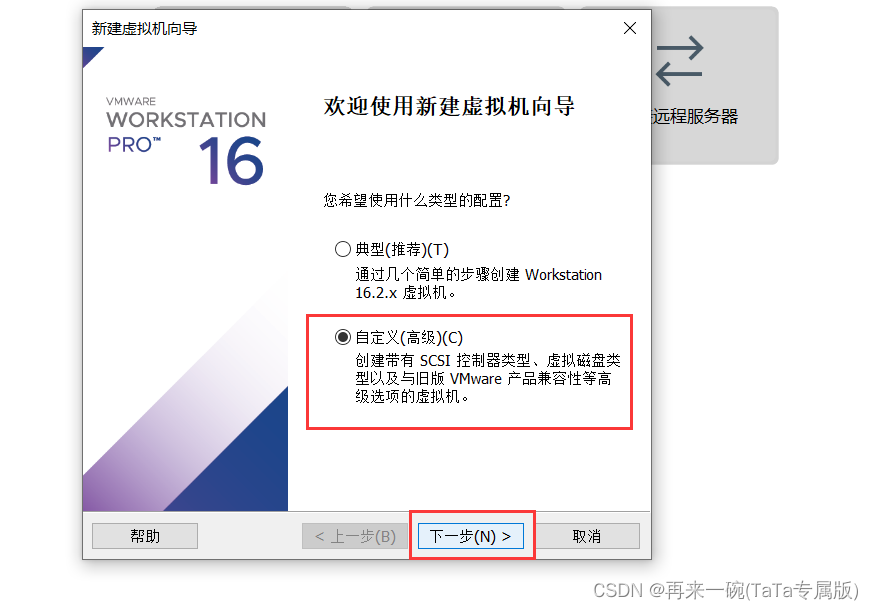
点击“创建新的虚拟机”——>

选择“自定义安装”然后下一步——>
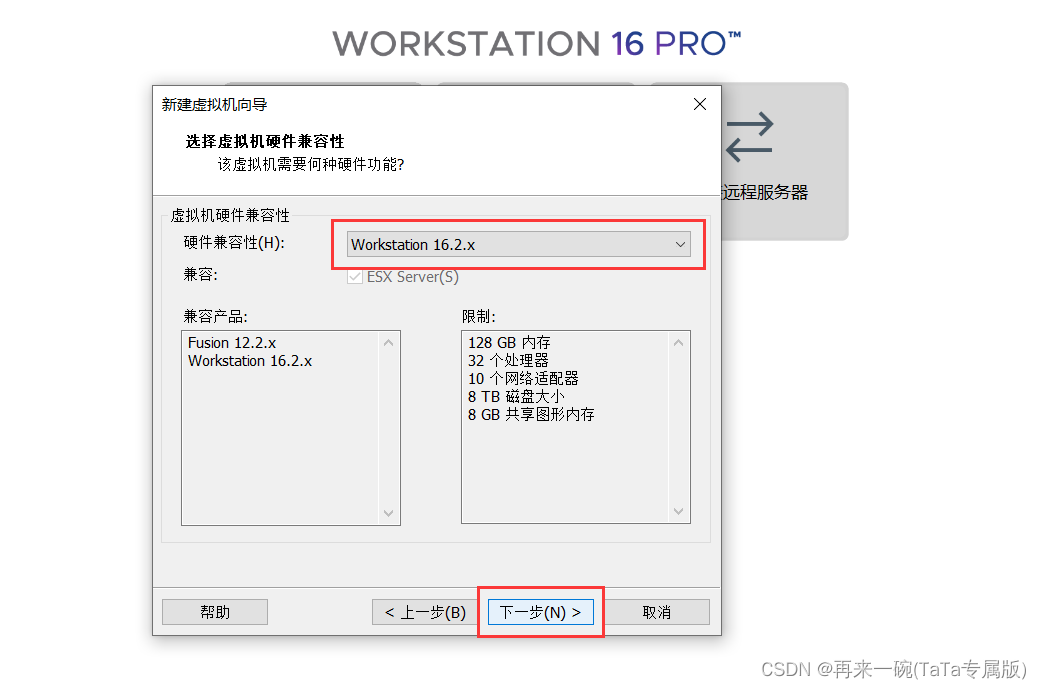
保持默认的兼容类型就可以,然后下一步——>
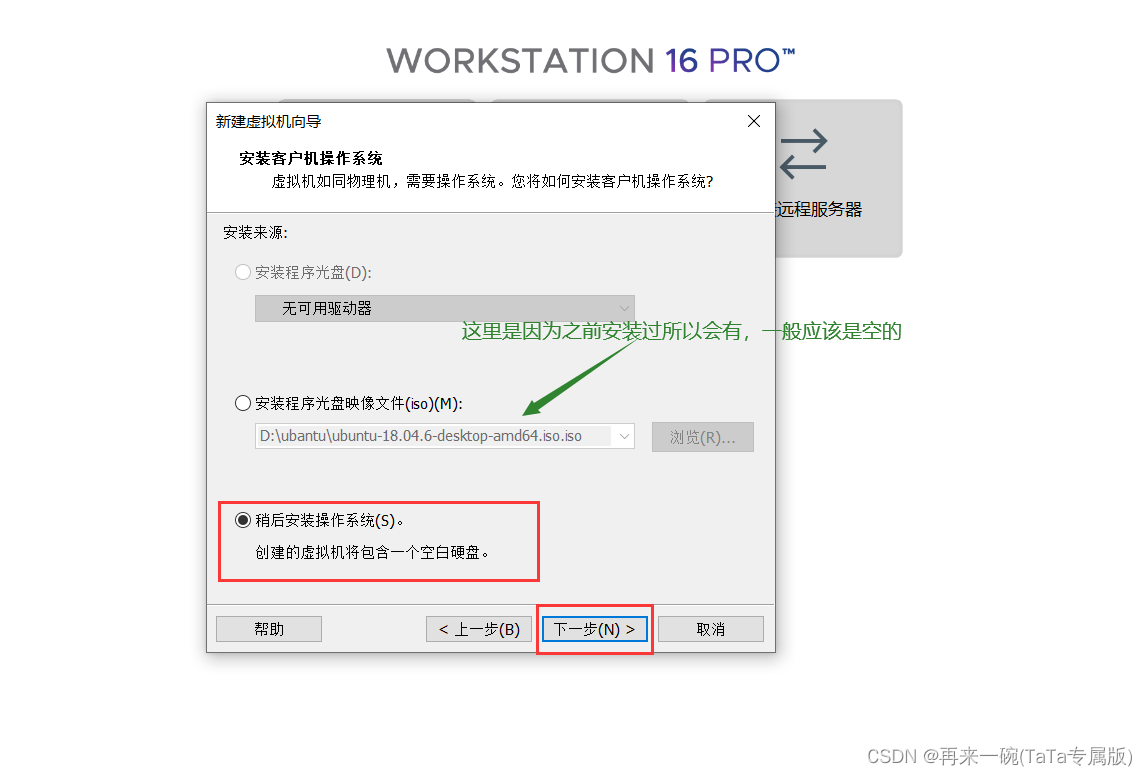
选择稍后安装,然后下一步——>
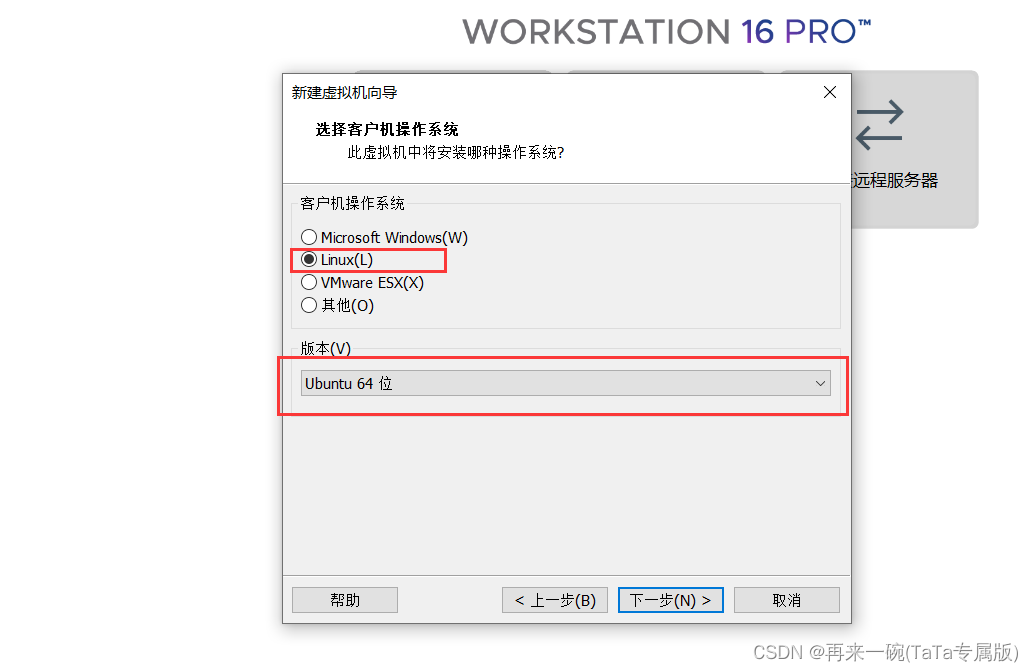
选择Linux,然后在下方的“版本”,选择自己需要的操作系统版本——>
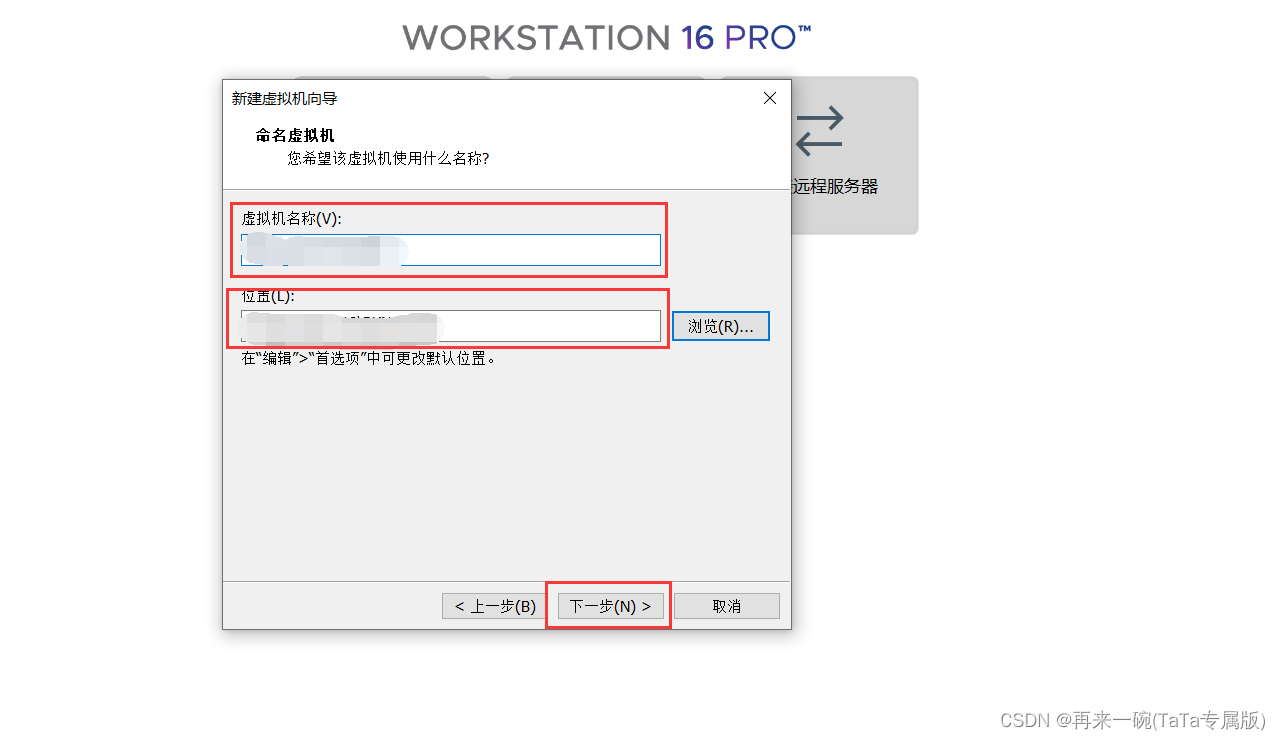
然后名字和位置可以看自己的,想叫啥叫啥,想放哪儿放哪儿(最好别放C盘,选个空间大的磁盘)——>
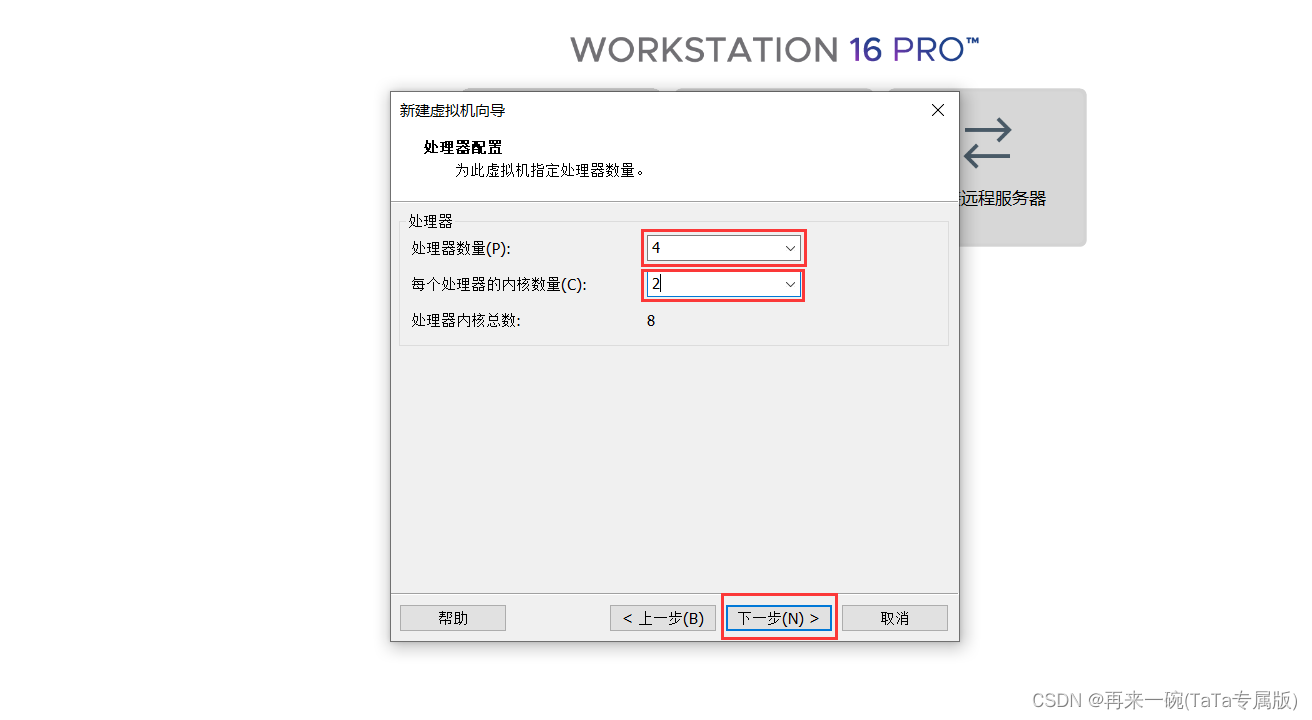
选择处理器数量和内核数,具体数量看自己的情况——>
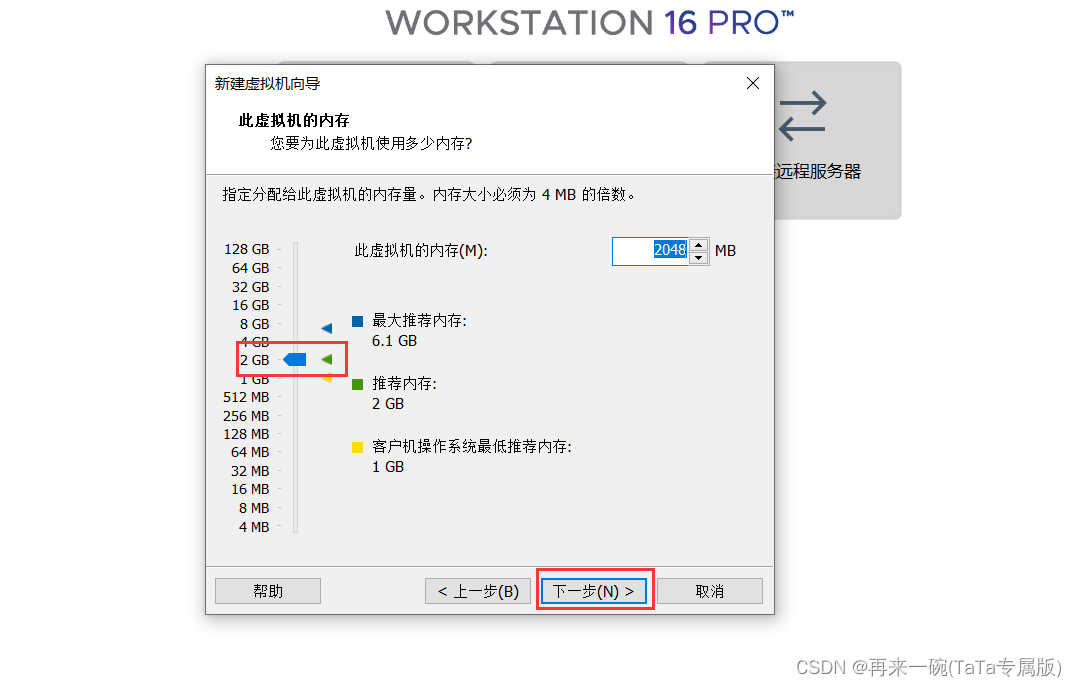
给虚拟机分配内存——>
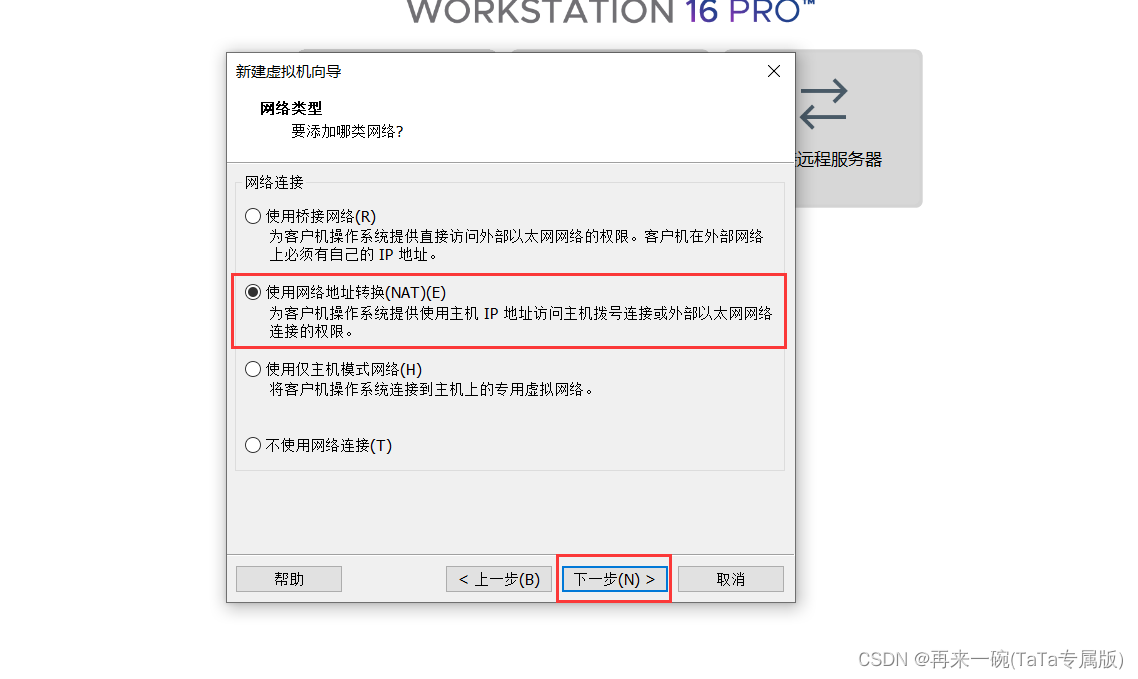
选择NAT,然后下一步——>
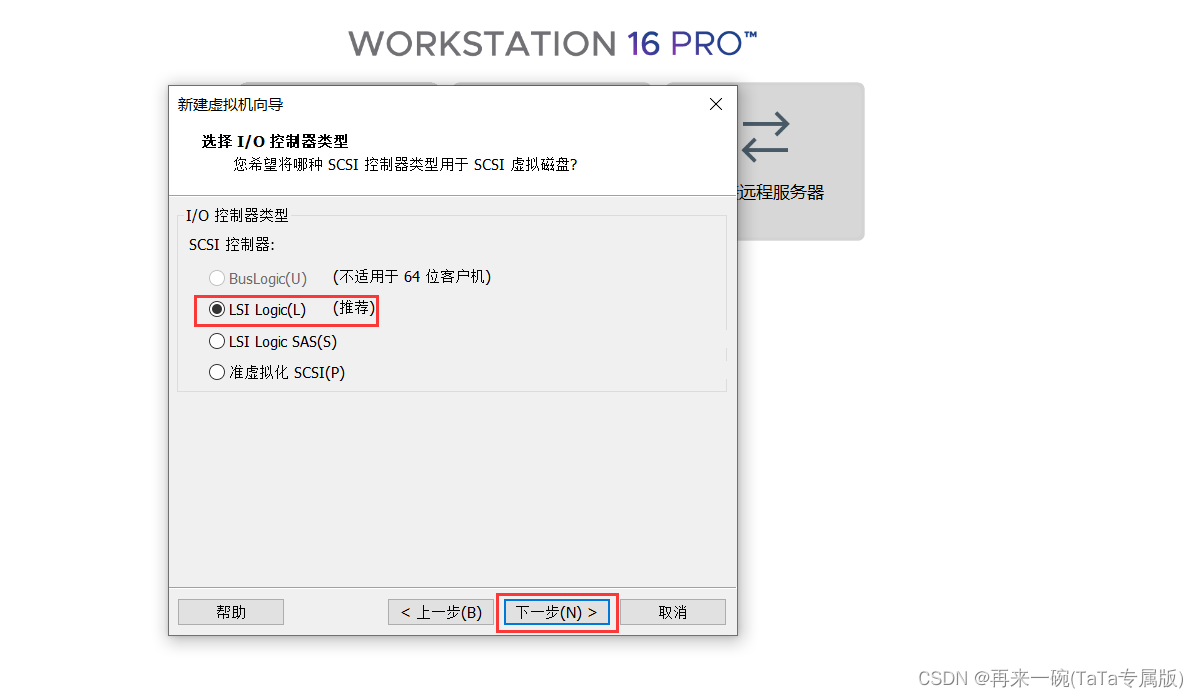
默认应该是LSI,然后下一步——>
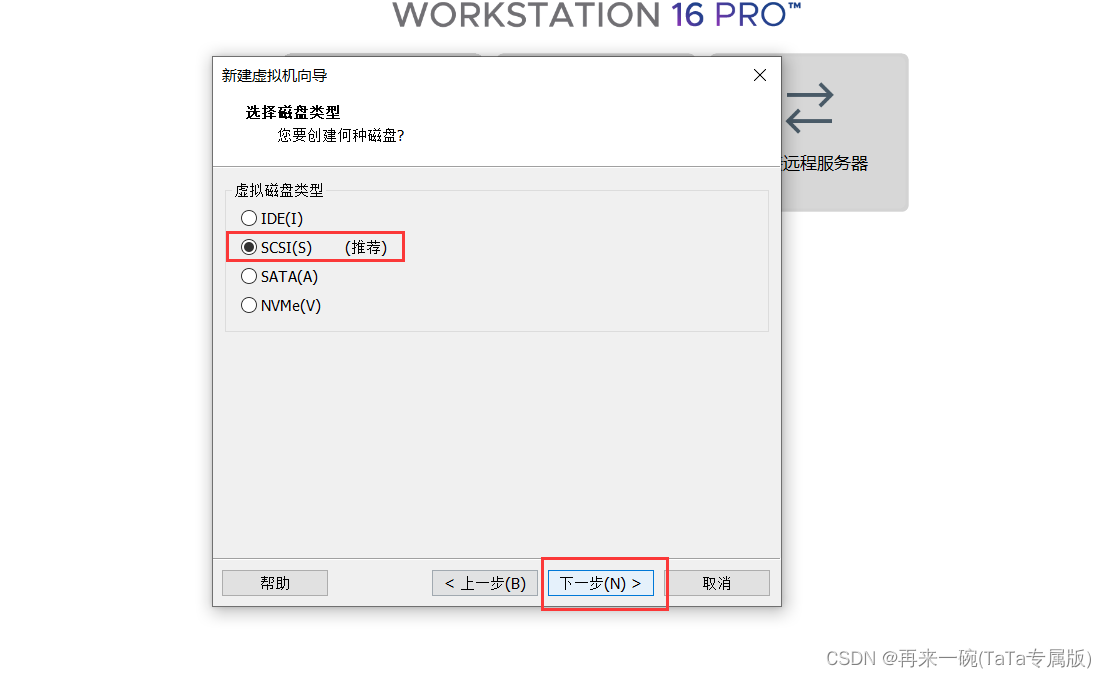
默认SCSI,然后继续下一步——>
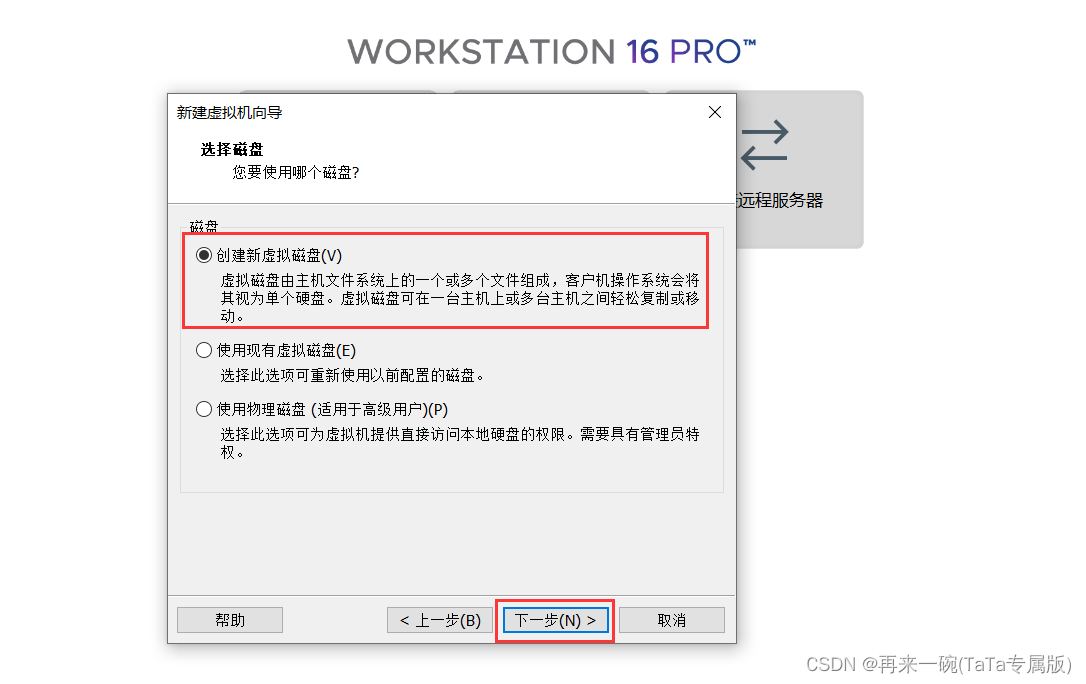
继续保持默认选项,然后下一步——>
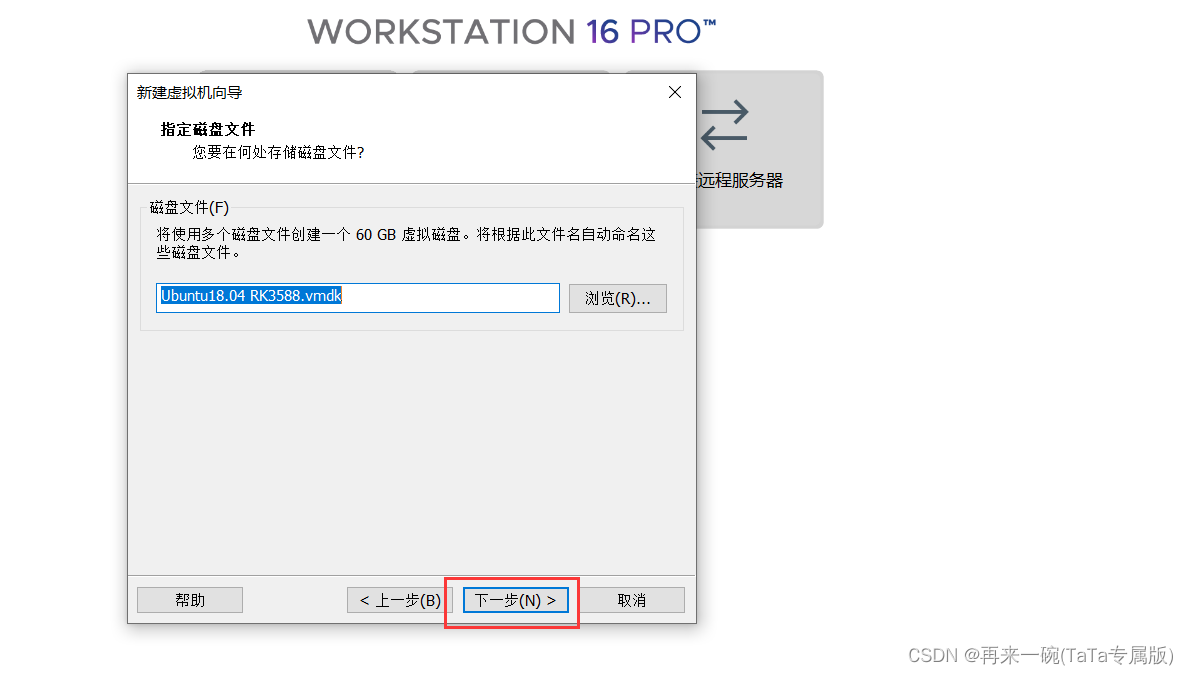
指定磁盘大小,五六十就行,不够的话后面可以再扩——>
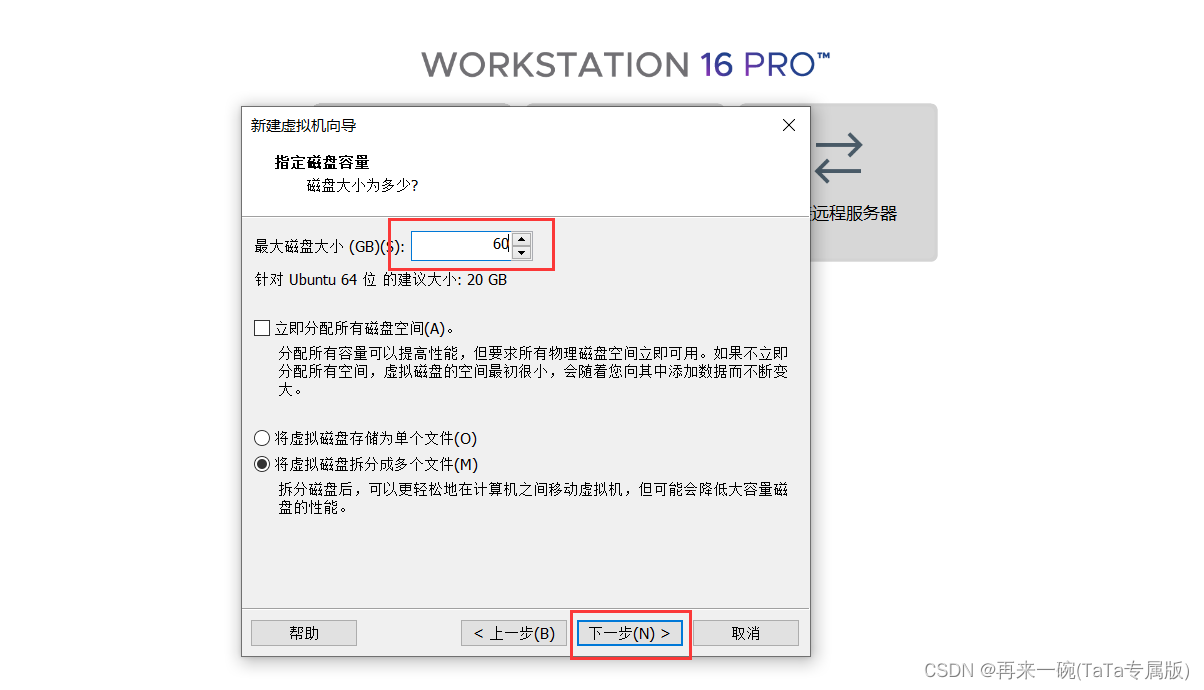
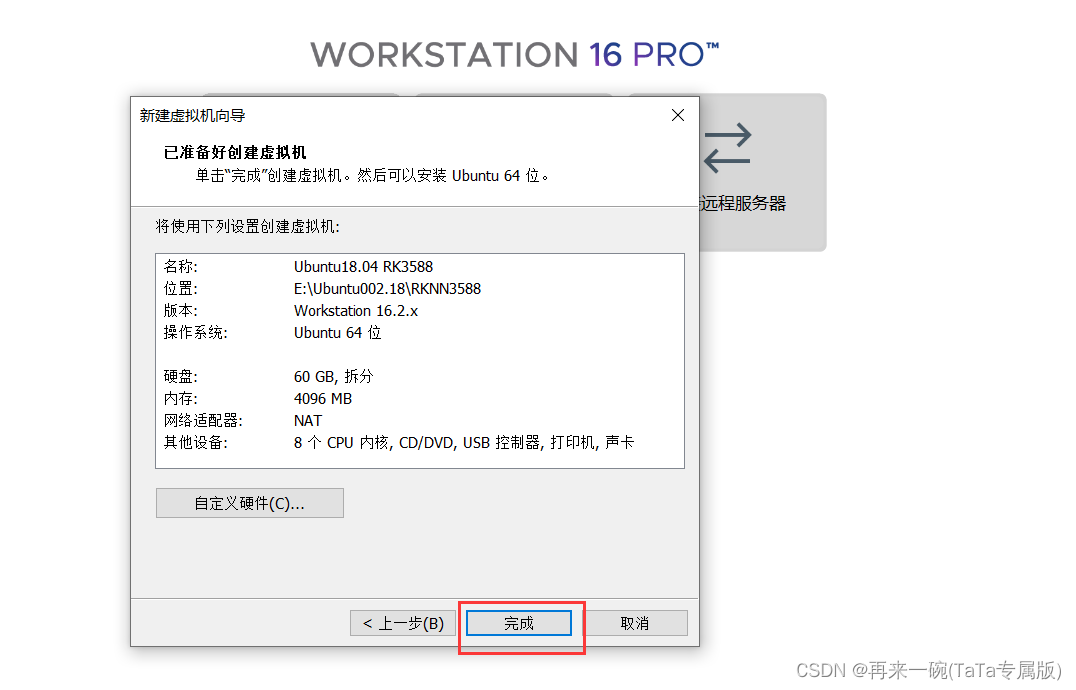
然后继续下一步——>
然后就OVER!(但是没有完全结束)
下面我们要添加刚才被我们忽略掉的ISO,点击“编辑虚拟机设置”——>

然后,选择镜像文件——>
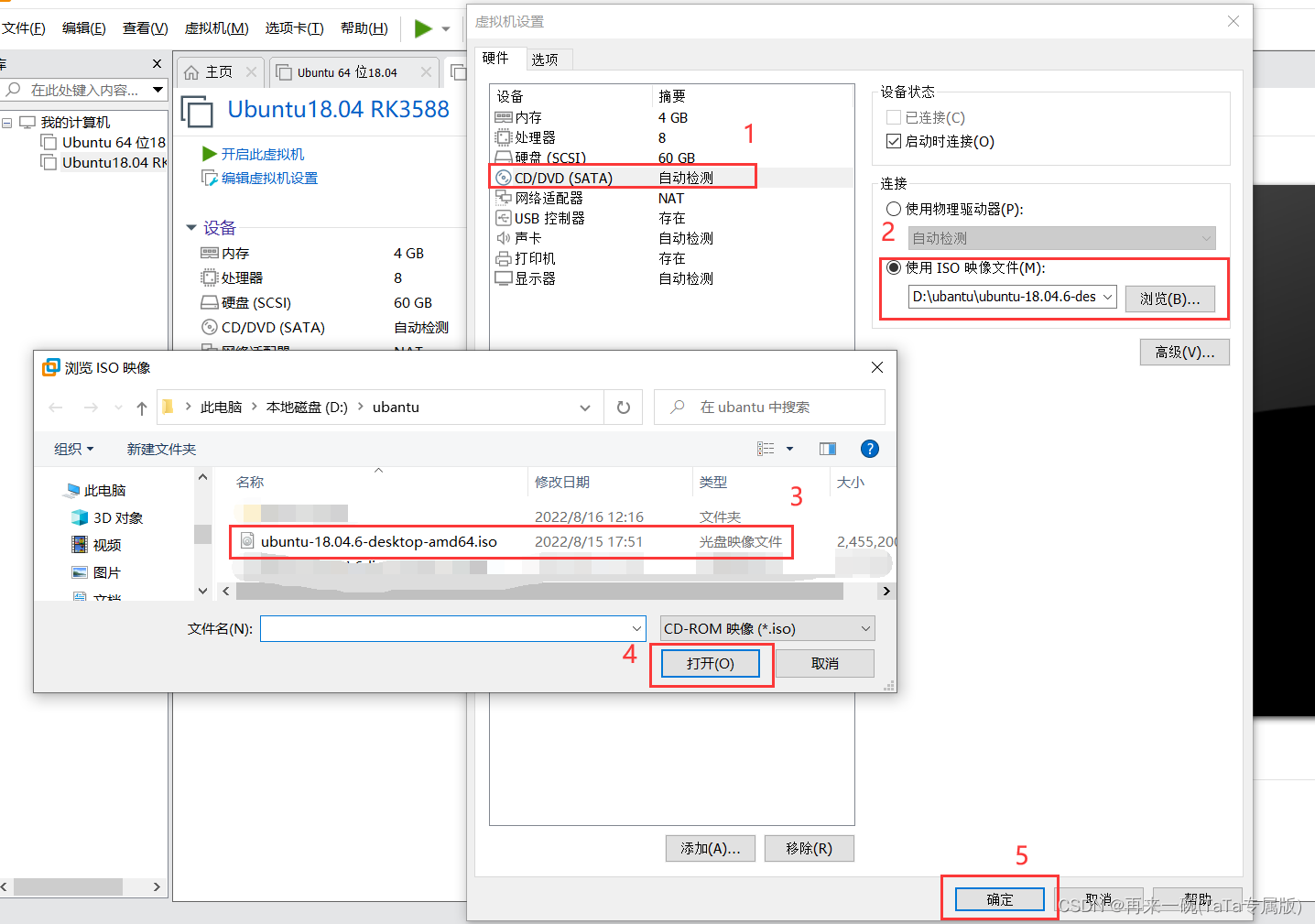
然后就可以“开启虚拟机”——>
开机的时间会,非常非常非常长,也可能是我电脑的问题吧,反正且得等会儿
【Ctrl+Alt可以从虚拟机内移出鼠标】
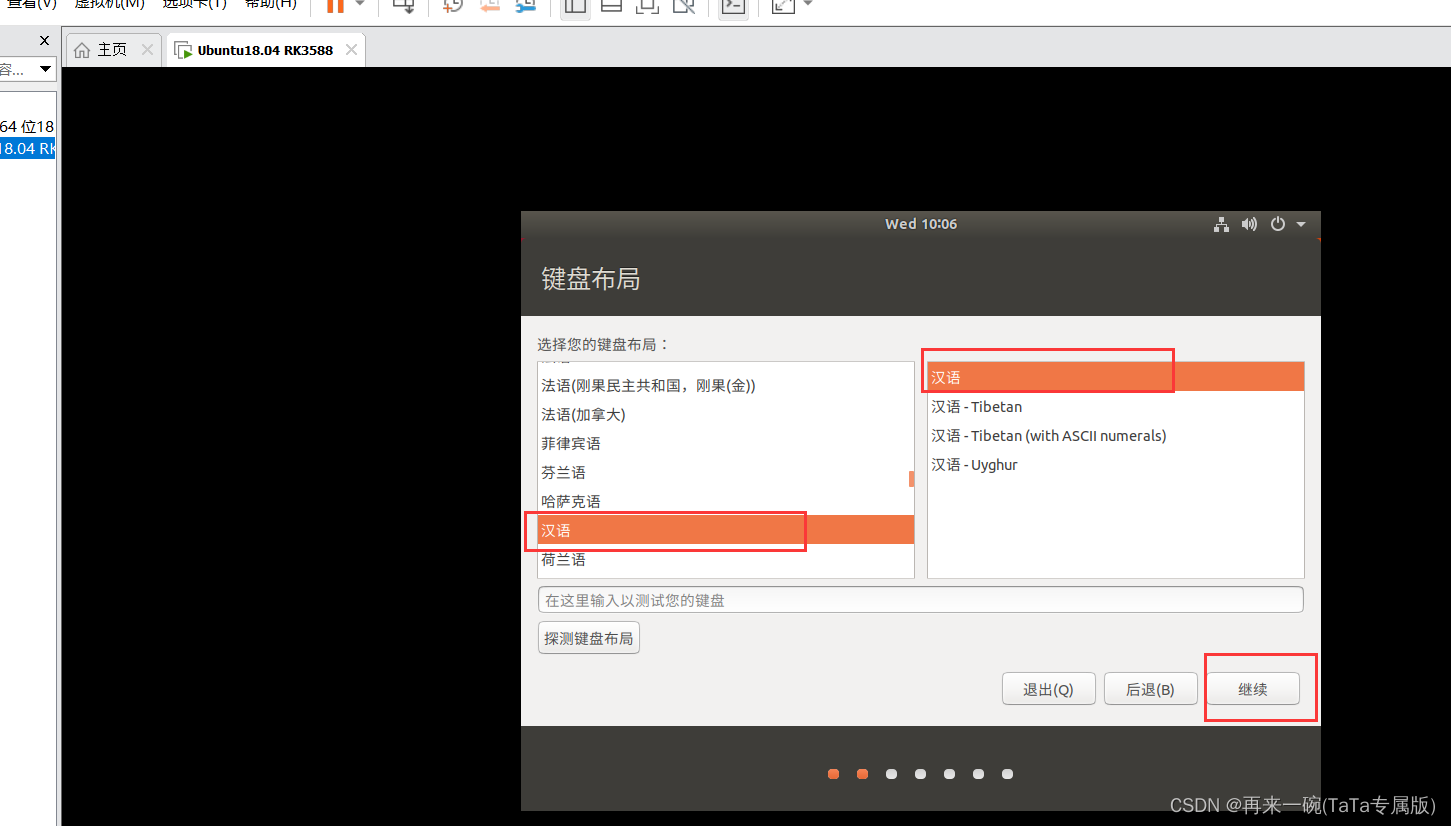
等开机以后,左框下拉选择汉语(想选英语也行),然后,”点击安装Ubuntu“——>


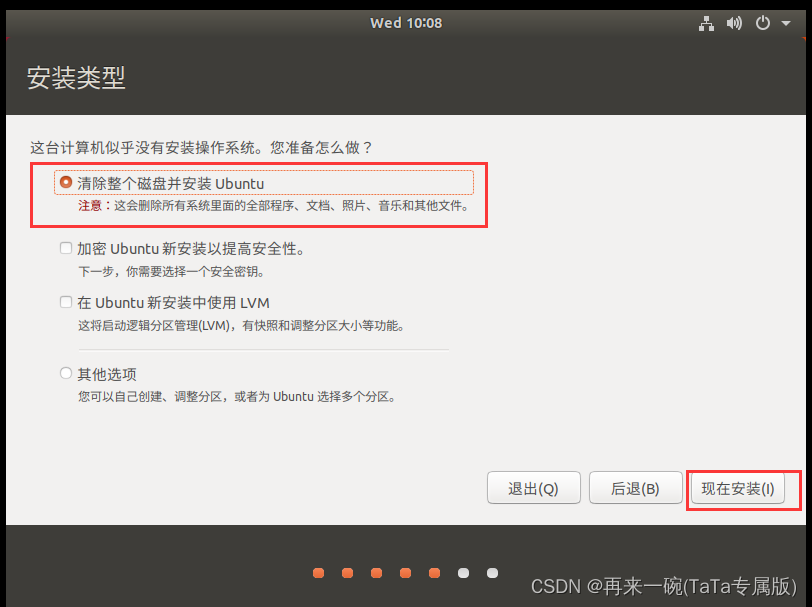
然后又是,稍微有点漫长的等待(可能是我的问题吧),然后随便选个时区,然后继续——>


然后,等他安装

然后,重启!在选项卡中找到电源然后,”重新启动客户机“(Two thousand years later…)

1.3 安装VMwareTools
因为没有安装VMwareTools,我们的屏幕会非常非常小并且,无法从本地传输文件到虚拟机,所以,我们先重启虚拟机,趁着它还没有完全开机的时候,点击安装——>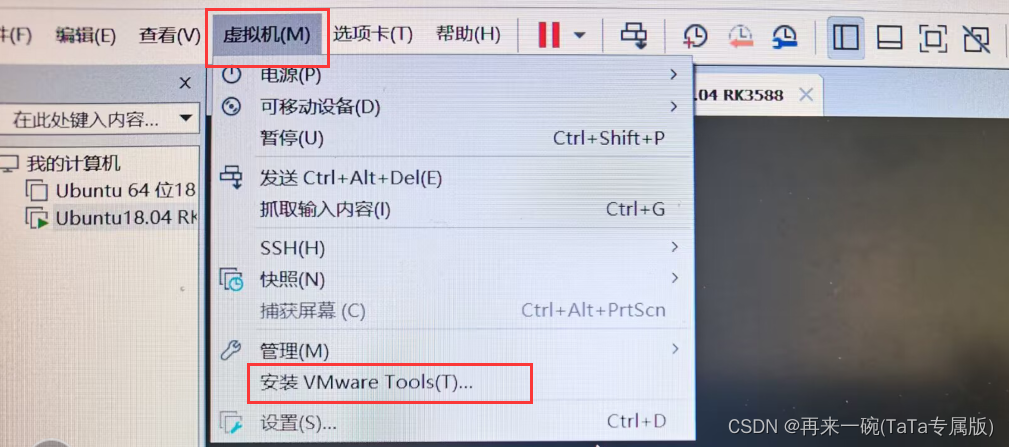
重新启动后我们可以看到桌面有一个VMwareTools,双击打开

将文件中的压缩包复制到主目录

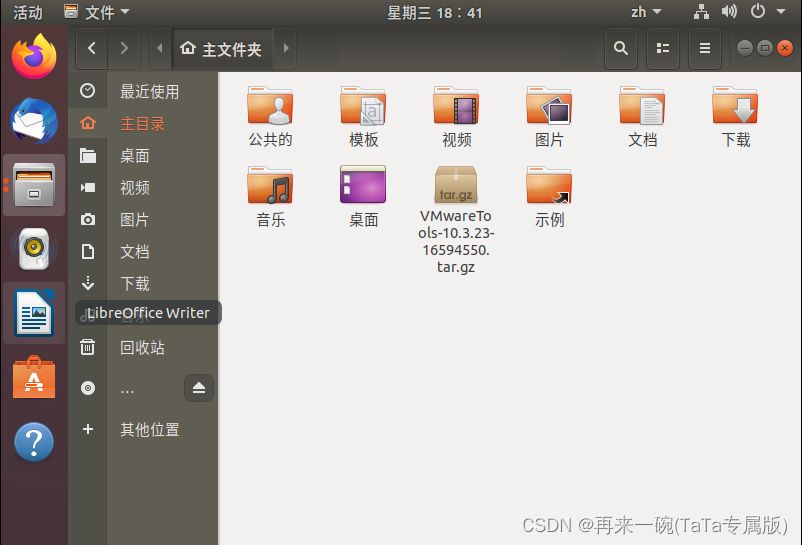
然后将压缩包提取到主目录(不一定非要主目录,想放哪儿放那儿吧)
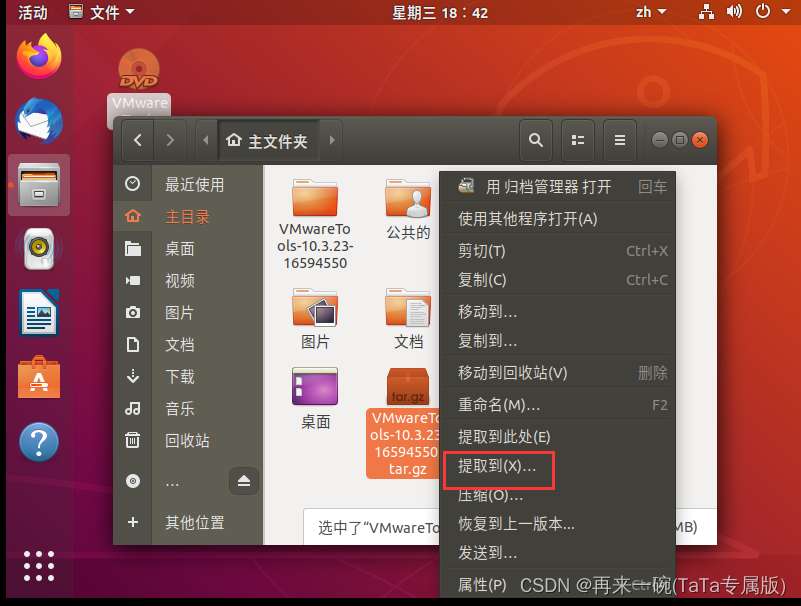
然后进入解压的文件中打开终端(注意路径)输入:
sudo ./vmware-install.pl
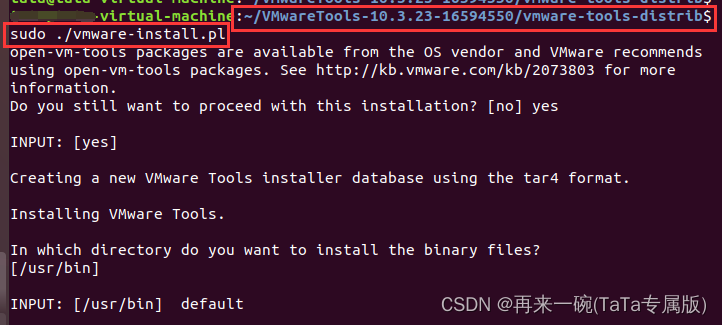
然后一路输入yes或者回车,就OK啦!可以看到虚拟机的桌面一下就变大了
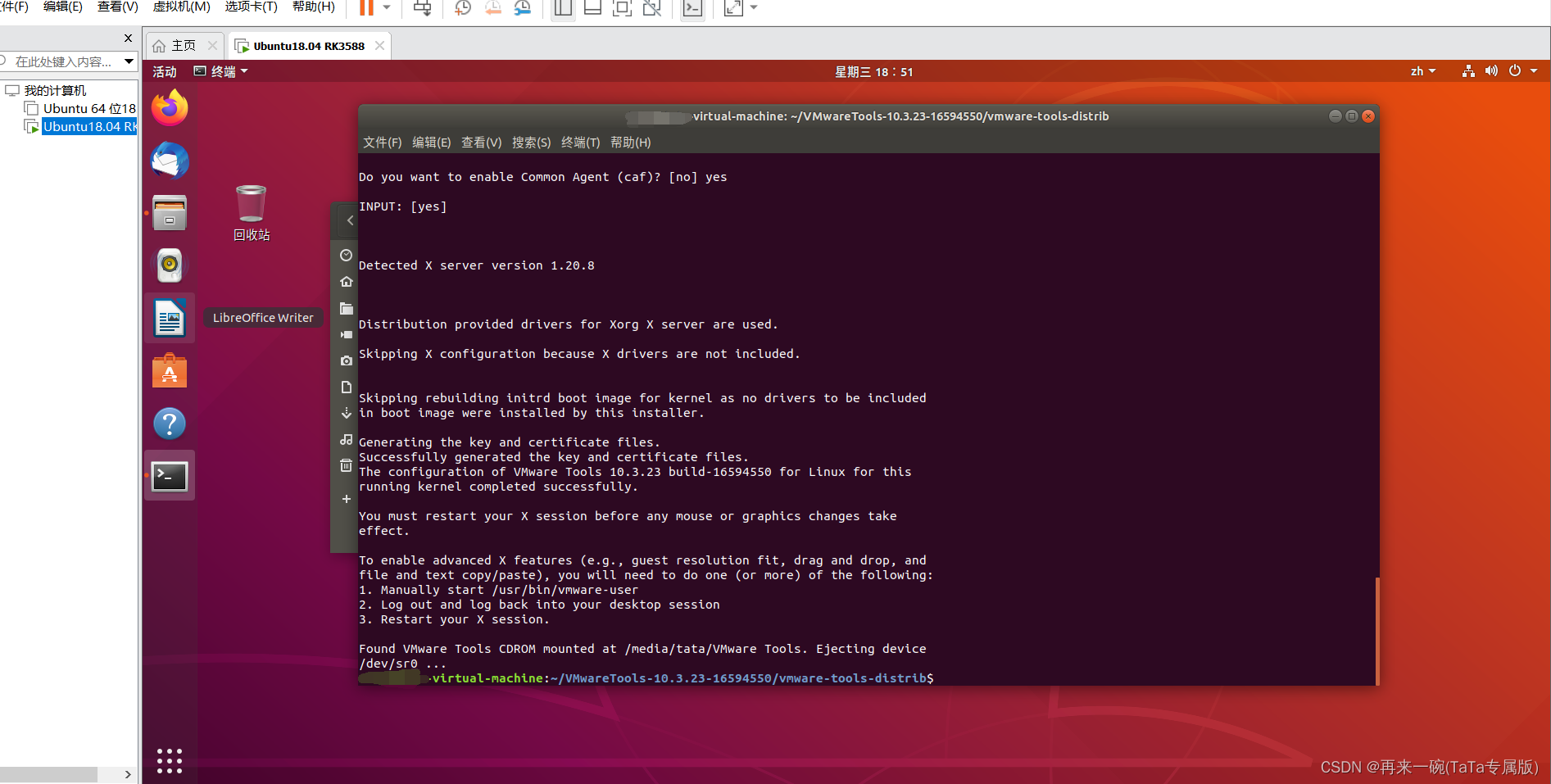
【如果还不能传输文件,试试重新安装VMwareTools】
我的tools安装好后还是有问题,试了一下命令行安装
首先,我们先更新一下,终端输入
sudo apt-get update
然后命令行继续输入:
sudo apt-get install open-vm-tools
sudo apt-get install open-vm-tools-desktop
然后重启一下虚拟机,解决
二、RKNN-Toolkit2工具的安装和使用
从官方的资料来看,工具适用的python版本是3.6或者3.8(这里我选的是Python3.6),如果环境中有不同的python版本可以使用virtualenv来管理python环境
1 RKNN-Toolkit2的安装
1.1 安装virtualenv 环境、Python3.6 和 pip3
sudo apt-get install virtualenv
sudo apt-get install python3 python3-dev python3-pip
1.2 安装相关依赖
sudo apt-get install libxslt1-dev zlib1g zlib1g-dev libglib2.0-0 libsm6
sudo apt-get install libgl1-mesa-glx libprotobuf-dev gcc
1.3 使用 virtualenv 管理 Python 环境并安装 Python 依赖
virtualenv -p /usr/bin/python3 venv
source venv/bin/activate
Ps:创建虚拟环境时的问题
在创建环境的时候出现了一些问题:
OSError: Command /home/tata/RK3588/bin/python3 - setuptools pkg_resources pip wheel failed with error code 2
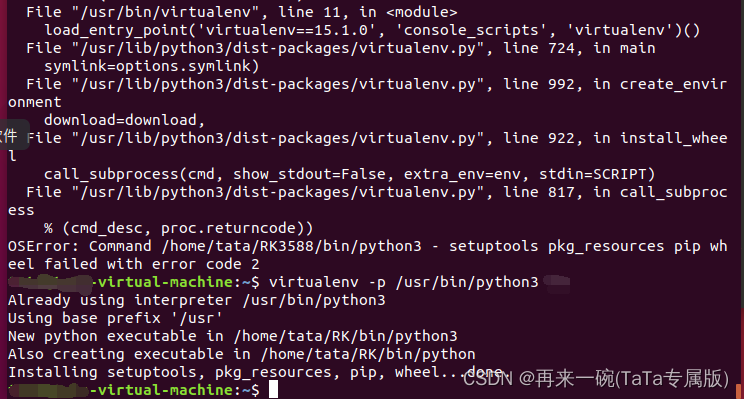
解决:先到主目录中把之前创建的不完全的虚拟环境文件删除,然后,
终端输入:
pip3 -V
pip3 install --upgrade pip
然后再重新创建我们的虚拟环境
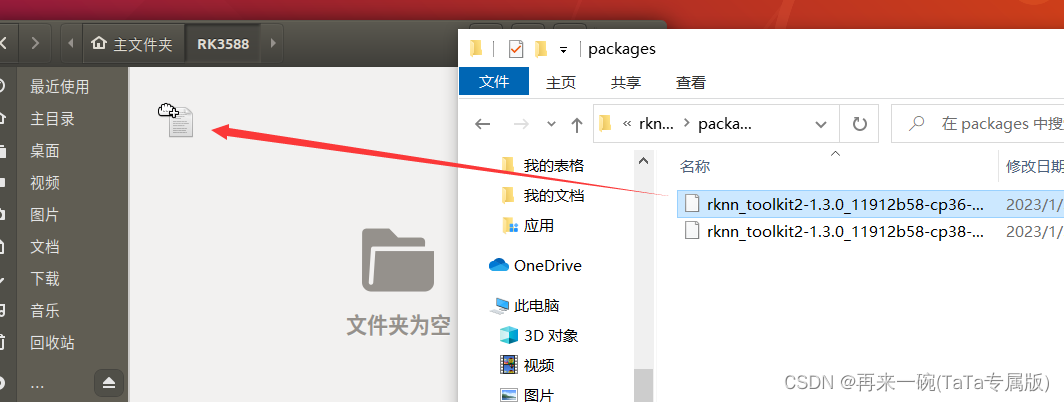
激活虚拟环境以后,cd到保存有依赖txt的文件中,如图
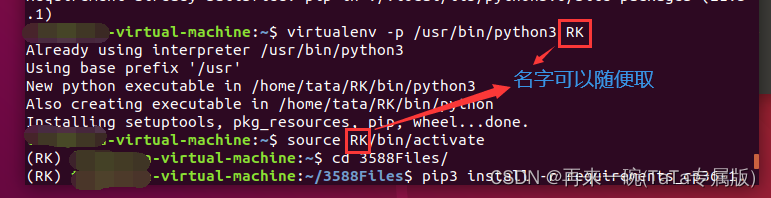
然后:
这里因为我安装的是python3.6,所以选的cp36,如果是python3.8应该用cp38
pip3 install -r requirements_cp36-1.3.0.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
然后,好吧,又出错了,我们看看错误提示:
ModuleNotFoundError: No module named ‘numpy’
ERROR: No matching distribution found for bfloat16==1.1
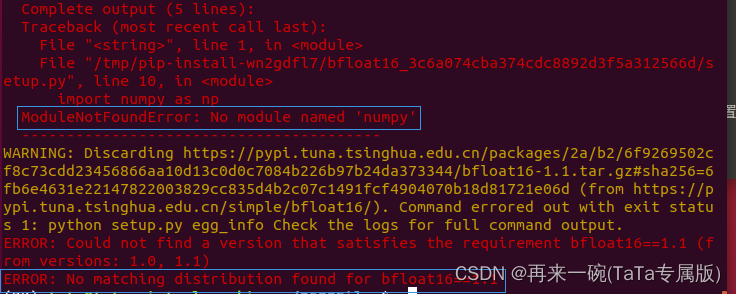
解决:手动安装numpy
pip3 install numpy==1.16.6 -i https://pypi.tuna.tsinghua.edu.cn/simple
然后再次下载requirements.txt就没有问题了
pip3 install -r requirements_cp36-1.3.0.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
1.4 安装 RKNN-Toolkit2
先把rknn_toolkit2-1.3.0_11912b58-cp36-cp36m-linux_x86_64.whl放到我们的虚拟机里,然后cd到该目录,然后:
sudo pip3 install rknn_toolkit2-1.3.0_11912b58-cp36-cp36m-linux_x86_64.whl
好吧,又报错了
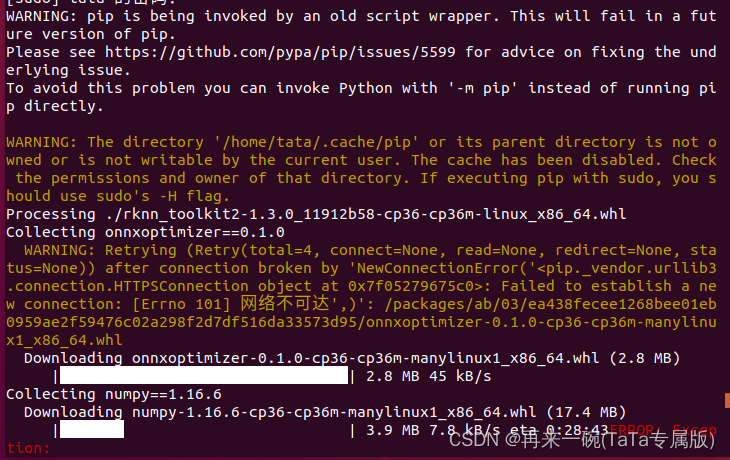
试一下:
pip3 install rknn_toolkit2-1.3.0_11912b58-cp36-cp36m-linux_x86_64.whl -i https://pypi.tuna.tsinghua.edu.cn/simple

OVER!
1.5 检查RKNN-Toolkit2是否安装成功
(可按ctrl+d组合键退出)
python3
from rknn.api import RKNN
如果导入 RKNN 模块没有失败,说明安装成功

2 RKNN-Toolkit2的使用
这里我直接用官方提供的demo进行测试,首先下载已经转为onnx的模型
终端定位到文件夹中:

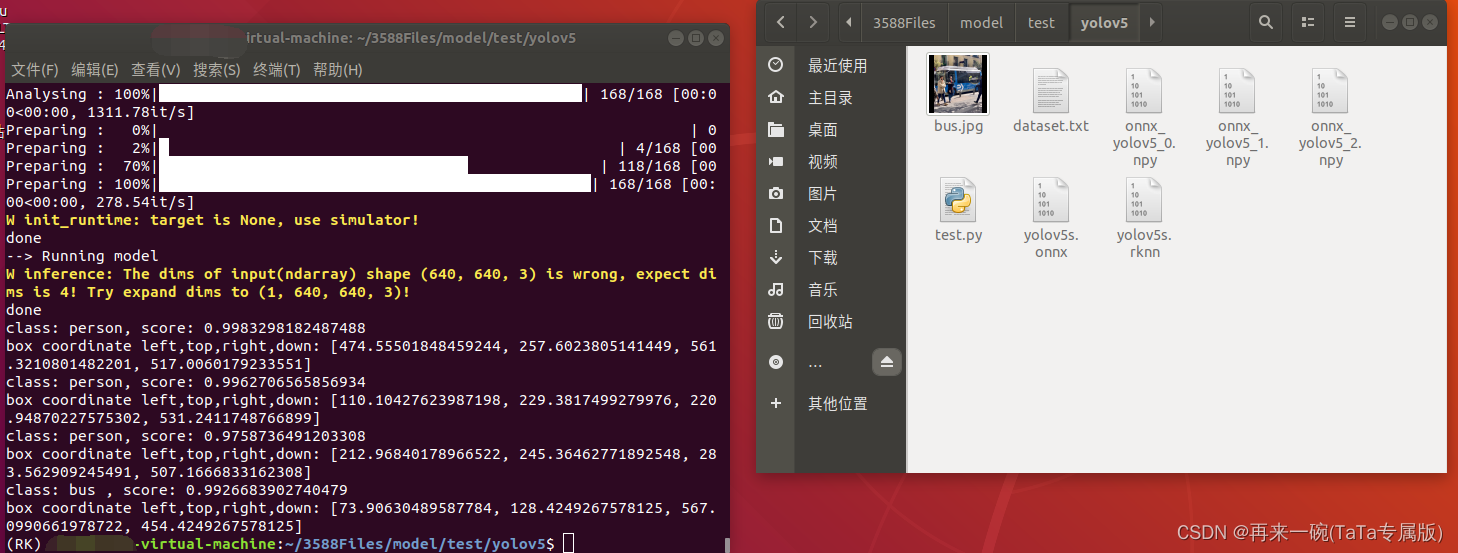
然后:
python3 test.py
【欢迎指正交流,谢谢】















 2395
2395











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











