






 文章详细介绍了ORB-SLAM2中单目的参考关键帧跟踪机制。在缺乏速度信息或恒速模型失败时,系统利用关键帧进行跟踪。通过BoW匹配加速当前帧与关键帧的特征点比对,初始位姿由上一帧位姿提供,接着通过3D-2D重投影误差优化位姿,并在优化过程中剔除外点。
文章详细介绍了ORB-SLAM2中单目的参考关键帧跟踪机制。在缺乏速度信息或恒速模型失败时,系统利用关键帧进行跟踪。通过BoW匹配加速当前帧与关键帧的特征点比对,初始位姿由上一帧位姿提供,接着通过3D-2D重投影误差优化位姿,并在优化过程中剔除外点。
ORB-SLAM2源码分析(单目)——参考关键帧跟踪
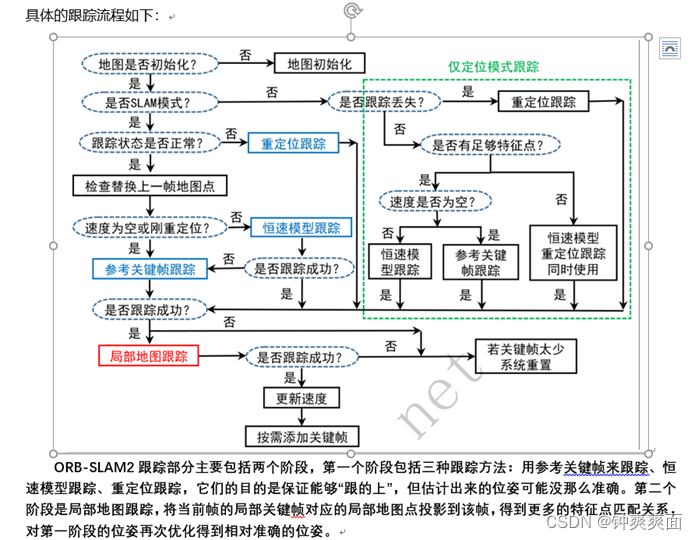
一、 参考关键帧跟踪简介
用参考关键帧的地图点来对当前普通帧进行跟踪
当没有速度信息的时候、刚完成重定位、或者恒速模型跟踪失败后使用,大部分时间不用。只利用到了参考帧的信息。
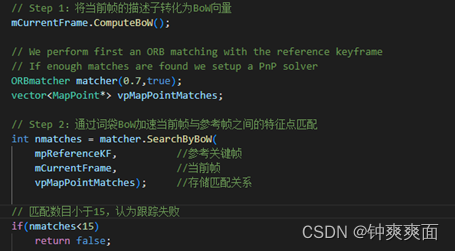
- 匹配方法是 SearchByBoW,匹配当前帧和关键帧在同一节点下的特征点,不需要投影,速度很快
- BA优化(仅优化位姿),提供比较粗糙的位姿
当使用恒速模型匹配到的特征点数较少时,就会选用关键帧模式跟踪,尝试和最近一个关键帧去做匹配。为了快速匹配,利用了bag of words(BoW)来加速匹配
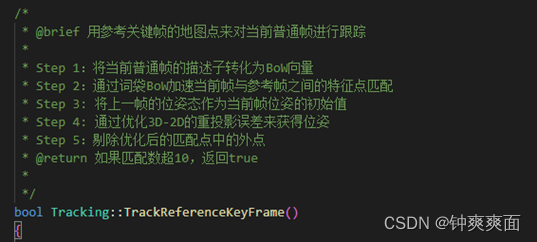
二、 将当前帧的特征点转化成bow向量,通过词袋匹配方法来对当前帧与上一帧关键帧特征点进行快速匹配
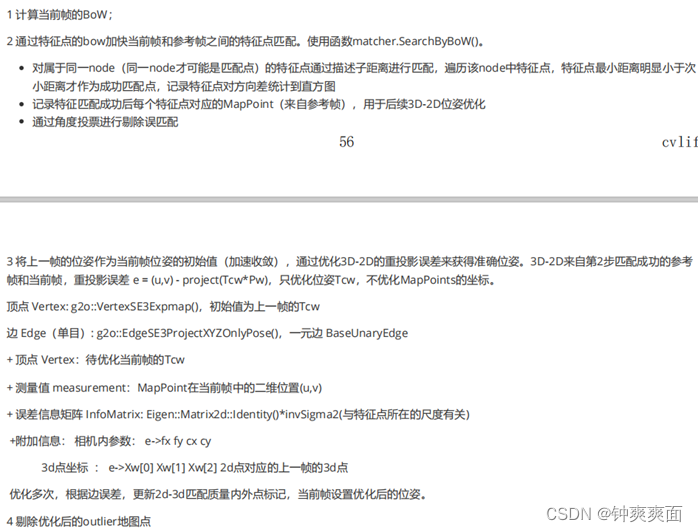
三、 将上一帧的位姿态作为当前帧位姿的初始值

四、 通过优化3D-2D的重投影误差来获得位姿
通过当前帧与参考关键帧的共视地图点,通过3D-2D的重投影误差(将地图点转化到当前的像素坐标系与当前帧的特征点对比得到误差值),对当前帧位姿进行优化。

五、 剔除优化后的匹配点中的外点
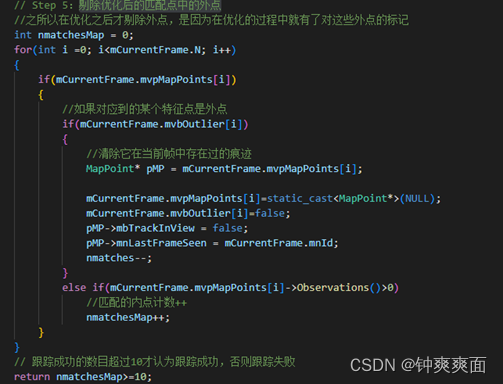
在进行位姿优化时,通过地图点进行重投影误差,能剔除一些外点,但是在优化过程只是进行标记,到这里才真正的删除


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









