






目录
1.Interface Register (address = 02h)
2.Mode0 Register (address = 03h)
3.Mode1 Register(address = 04h)
4.Mode2 Register (address = 05h)
5.Input Multiplexer Register (address = 06h)
一、寄存器说明
只介绍常用的02-06
1.Interface Register (address = 02h)
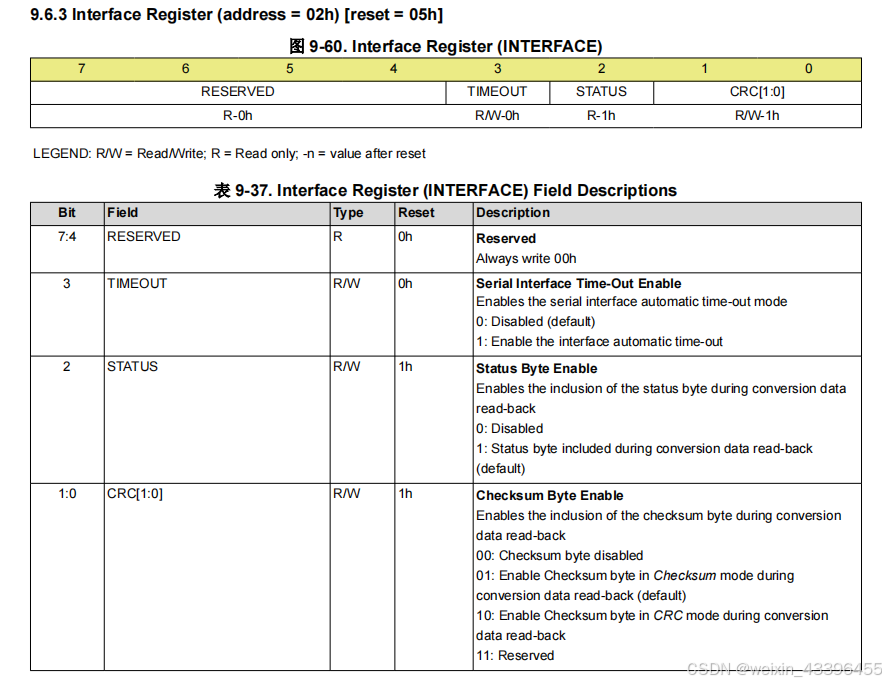
TIMEOUT:
如果启用串行接口超时模式,最小SCLK频率=1 kHz。如果禁用串行接口超时模式(默认),则没有最小SCLK频率。
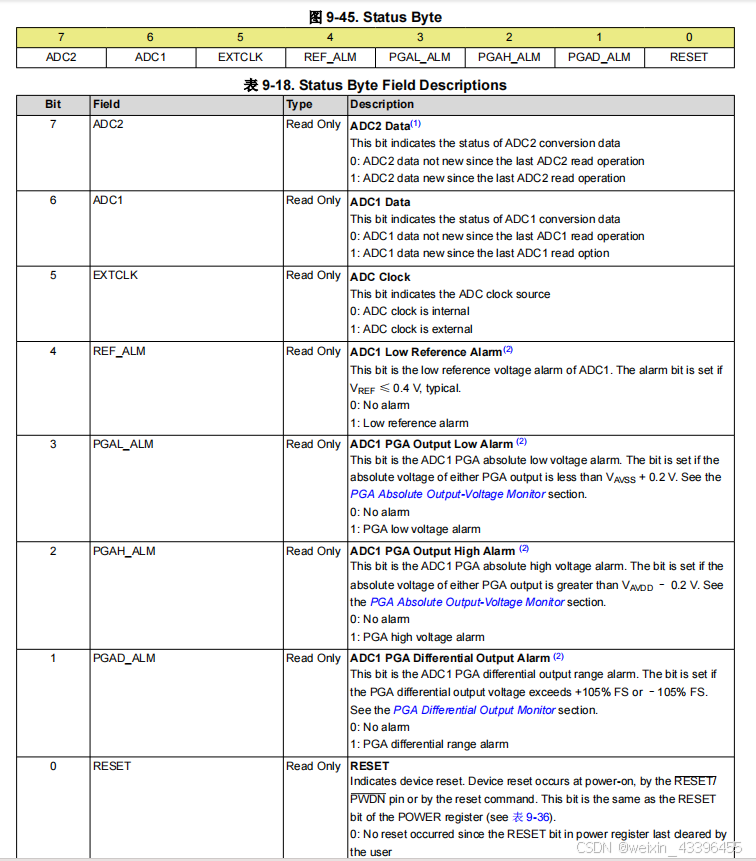
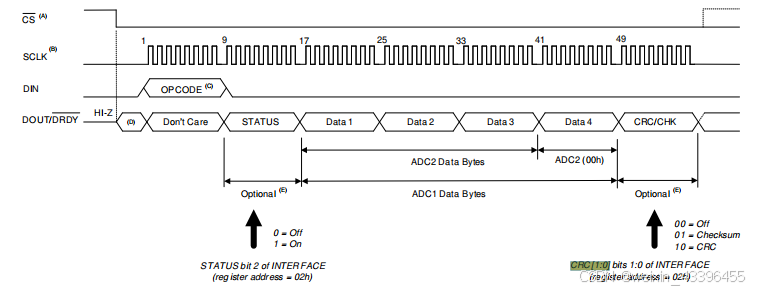
STATUS:
状态字节是序列中的第一个字节。状态字节表示新的ADC1和ADC2数据、ADC1 PGA告警的状态、低参考告警状态、时钟模式和复位状态。状态字节由接口寄存器的状态位(寄存器02h)的第2位启用。启用后接收的第一个字节就是状态字节,不启用所接收的数据就是采样的数据。
CRC[1:0] :
若开启CRC校验,那么校验和字节是数据字节序列中的最后一个字节。若不开启,则没有校验码。
2.Mode0 Register (address = 03h)
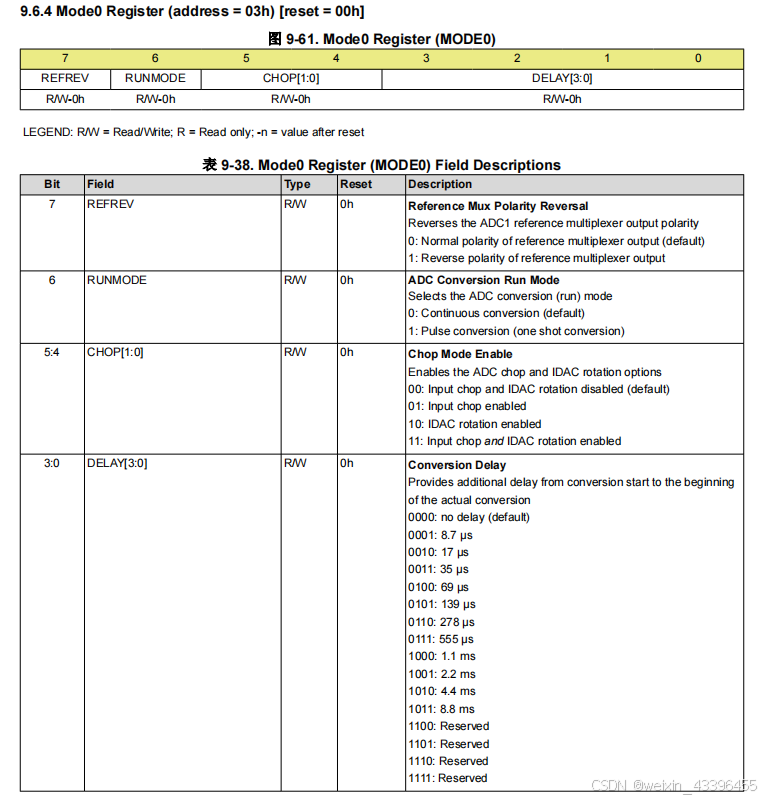
2.1REFREV :
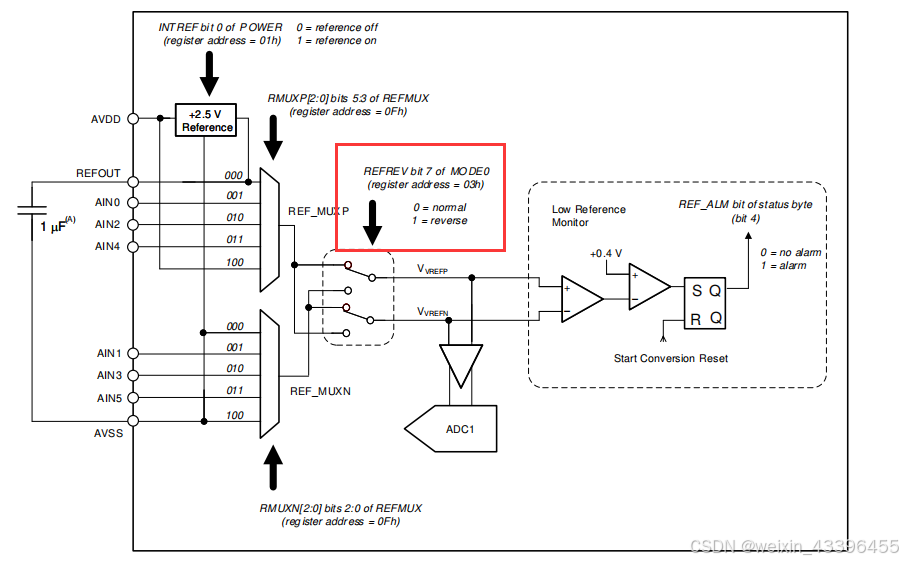
参考极性反转开关将参考极性从负极变为正极。极性开关允许正的或负的外部参考极性。当使用内部参考电源或模拟电源时,将反转开关设置为正常位置(REFREV = 0)。
2.2RUNMODE :
ADC1有两种转换模式:连续模式和脉冲模式。
连续转换模式无限转换,直到用户停止。
要启动ADC1转换,请打开启动引脚或发送START1命令。在此模式下,ADC1不断转换,直到通过降低启动引脚或发送STOP1命令而停止。要重新启动正在进行中的转换,请切换起始引脚或发送STOP1和START1命令序列。如果重新启动转换,DRDY驱动很高。当转换数据准备好时,DRDY被驱动到低。关于停止DRDY-DRDY定时要求,请参见图9-38和表9-12。
脉冲转换模式在启动引脚过高或发送启动命令后执行一次转换。使用运行模式(第6位,模式第0位)来编程转换模式。
在脉冲转换模式下,ADC1在每次将启动针高或发送START1命令时执行一次转换。在第一次转换完成后,进一步的转换将自动停止。要重新启动正在进行中的转换,请切换起始引脚或发送STOP1和START1命令序列。DRDY输出驱动高表示转换开始,当转换数据就绪时驱动低。如果在正在进行的转换期间发送了stot命令,则该命令无效,因为ADC完成了转换。
2.3CHOP[1:0] :
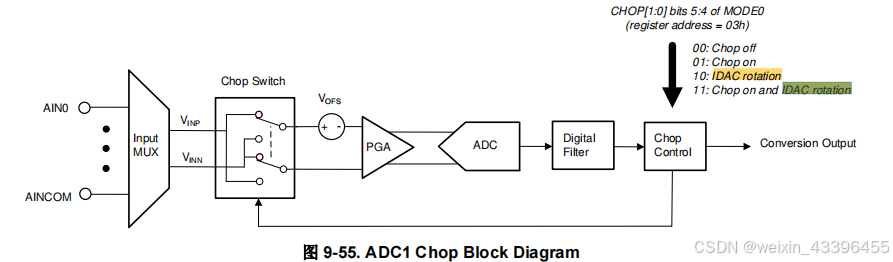
chop mode作用:ADC1包含了一个全球切割选项,以将偏移电压和偏移电压漂移降低到非常低的水平。当启用Chop时,ADC将执行两个内部转换,以取消输入的偏移电压。第一次转换是以正常的输入极性进行的。ADC反转第二次转换的内部输入极性。计算两种转换的差值,得到去除偏移电压后的最终修正结果。
chop mode在一些情况下不能使用:
脉冲转换模式不能与切割模式一起使用。相反,通过短暂脉冲启动针(或依次发送START1和STOP1命令)启用切割时,使用连续转换模式,以实现脉冲转换模式提供的相同的单转换结果。
如果启用了切割模式,则将禁用偏移校准寄存器。
在温度传感器测量之前,启用PGA,设置增益=1,禁用切割模式,并确保内部电压参考已通电。
使用内部或外部参考值测量电源监视器的读数。对于外部参考,最小参考电压为1.5 V。在测量之前,启用PGA,设置增益=1,并禁用切割模式。
请注意,必须禁用切割模式,才能用TDAC测试ADC。
IDAC rotation
IDAC电流跟踪内部参考电压。由于对IDAC1和IDAC2使用相同的参考电压,因此电流源是匹配的。匹配的性能对于硬件补偿、三线rtd等应用程序非常重要。通过使用IDAC旋转模式,可以进一步改善IDAC与IDAC的不匹配。旋转模式会自动交换交替转换的IDAC1和IDAC2连接。ADC平均交替转换,以消除IDAC不匹配。IDAC旋转可以由用户手动(通过交替IDAC针连接)或通过IDAC自动旋转模式执行。
对于CHOP或IDAC旋转模式,可能需要额外的时间延迟以允许外部沉降效应,并且只能由延迟位提供;有关延迟设置,请参见表9-38。
2.4DELAY[3:0] :
当一个新的转换开始时,ADC在实际开始转换之前提供了一个52µs的内部延迟。提供这个定时延迟是为了允许集成的,模拟的,抗别名滤波器来解决。在某些情况下,需要更多的延迟来考虑到外部沉降的影响。通过使用MODE寄存器的位延迟[3:0]来编程额外的时间。可编程范围为8.7µs到8.8 ms。作为使用可编程时间延迟的替代方案,在ADC配置更改后,也可以根据需要延迟启动条件的启动。对于CHOP或IDAC旋转模式,可能需要额外的时间延迟以允许外部沉降效应,并且只能由延迟位提供;有关延迟设置,请参见表9-38。
3.Mode1 Register(address = 04h)
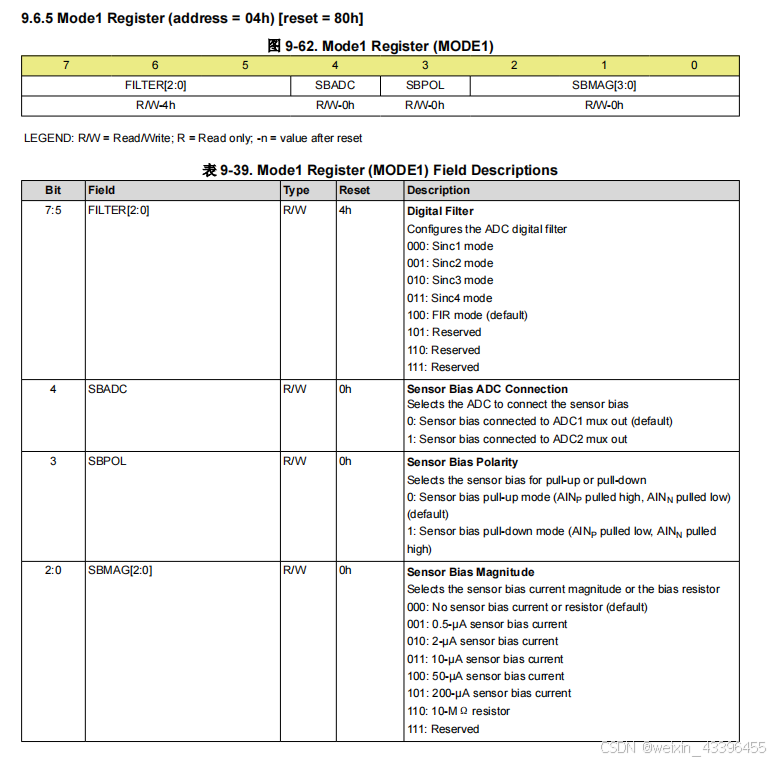
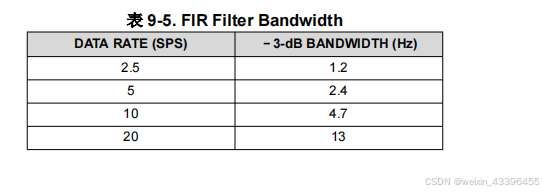
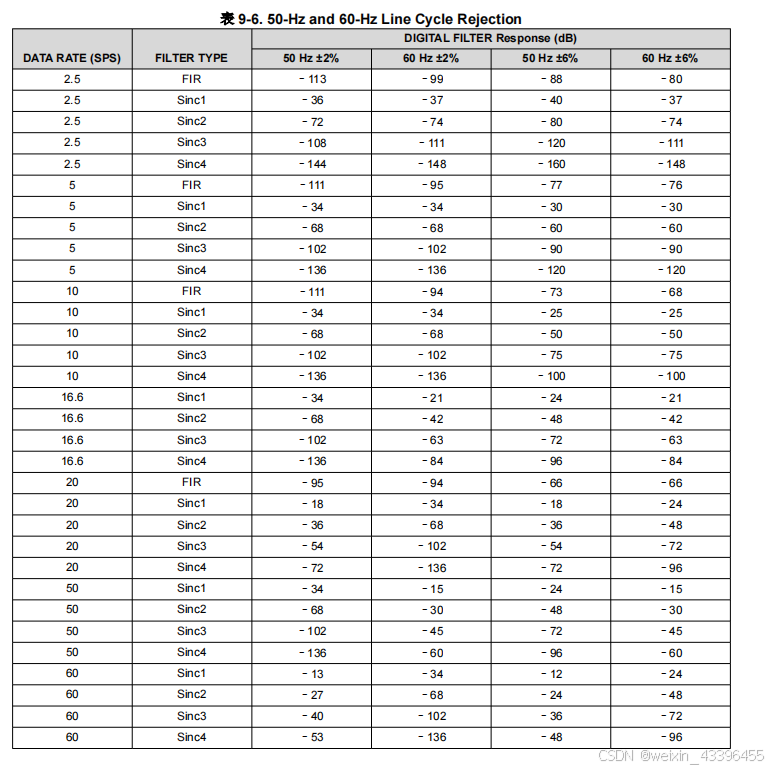
3.1FILTER[2:0]
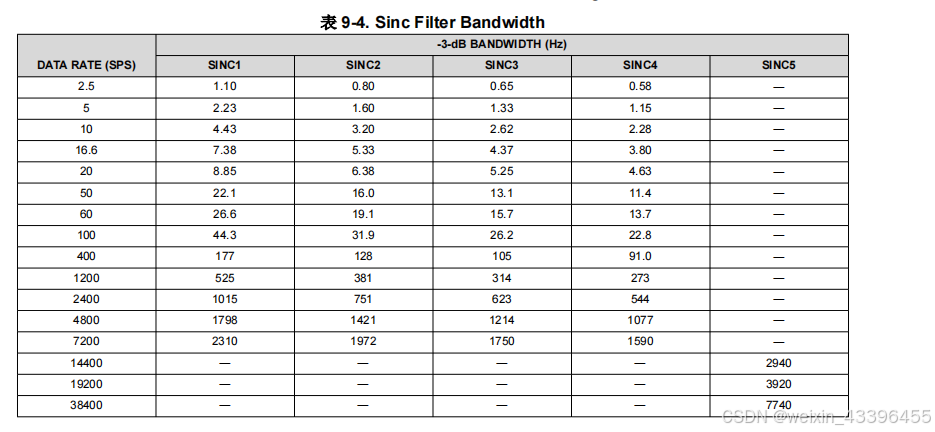
数字滤波器有两种可选择的模式:sin (x) / x(sinc)模式和有限脉冲响应(FIR)模式(参见图9-13)。sinc模式提供了2.5 SPS到38400 SPS的数据速率,可选择的sinc顺序为1到5。FIR滤波器提供同时拒绝50hz和60hz电力线频率,数据速率为2.5 SPS到20 SPS,单周期确定转换。
在不同的数据传输速度情况下选择不同的滤波方式,数据带宽不一样,同时对50HZ与60HZ滤波效果也不同。
3.2SBADC
传感器偏置ADC连接
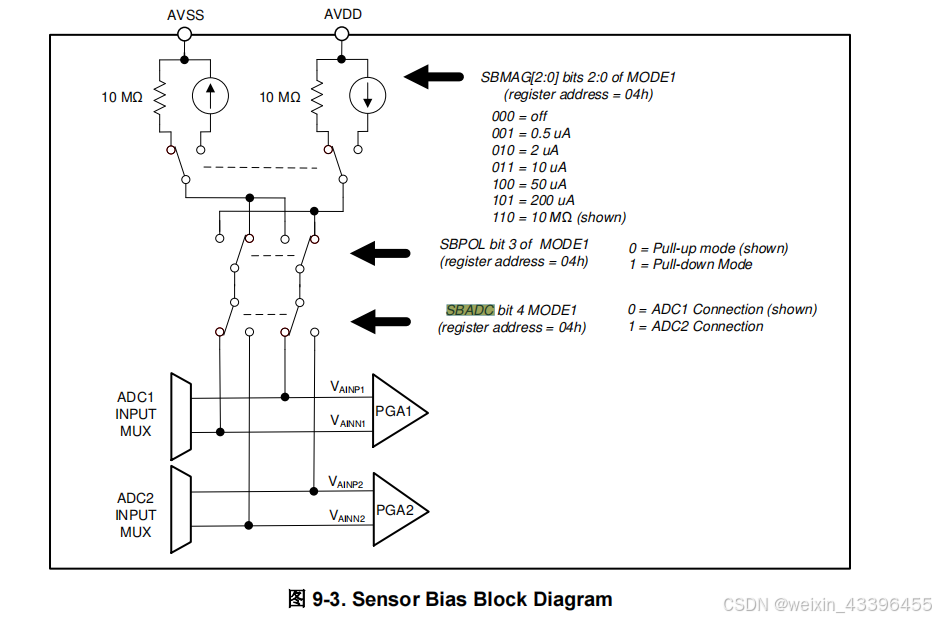
0: 连接到ADC1 mux的传感器偏置输出(默认)
1:连接到ADC2 mux的传感器偏置输出
3.3SBPOL
传感器偏置极性:选择上拉或下拉的传感器偏置
0:传感器偏置上拉模式(AINP拉高,AINN拉低)(默认)
1:传感器偏置下拉模式(AINP拉低,AINN拉高)
3.4SBMAG[2:0]
传感器偏置量:选择传感器偏置电流大小或偏置电阻
000:没有传感器偏置电流或电阻(默认)
001:0.5-µA传感器偏置电流
010:2-µA传感器偏置电流
011:10-µA传感器偏置电流
100:50-µA传感器偏置电流
101:200-µA传感器偏置电流
110: 10-MΩ电阻111:保留
4.Mode2 Register (address = 05h)
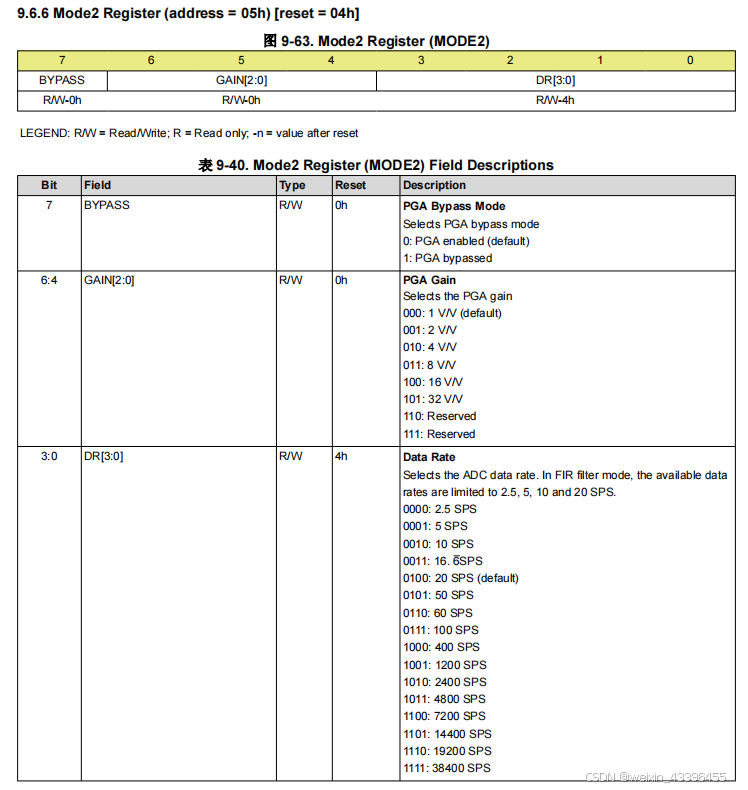
4.1BYPASS
是否使用增益放大器,默认使用
4.2GAIN[2:0]
确定增益放大值
4.3DR[3:0]
确定数据传输速率
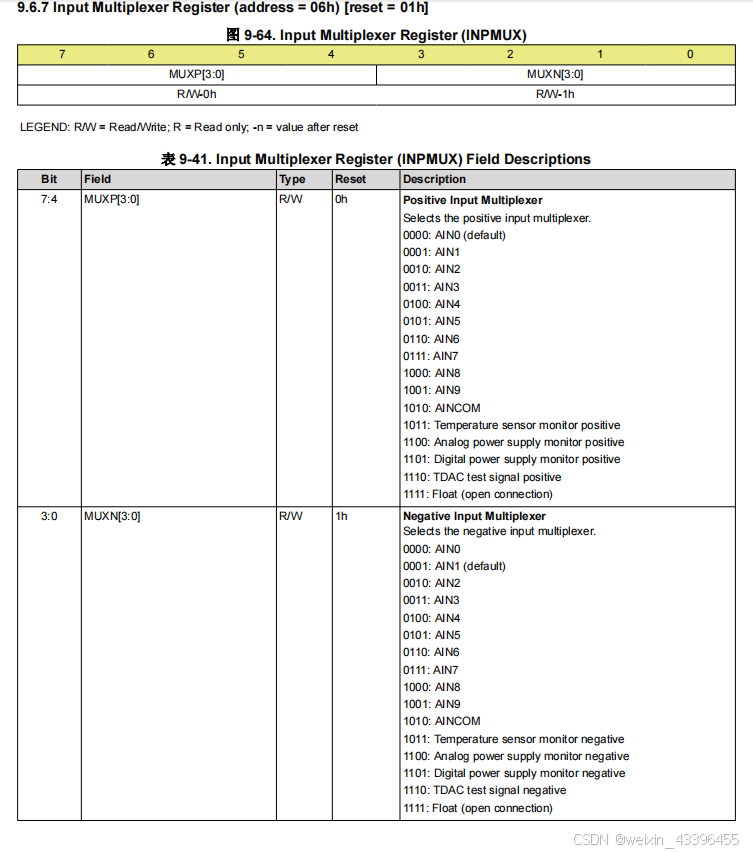
5.Input Multiplexer Register (address = 06h)
输入多路复用器寄存器:确定输入端口
二、命令
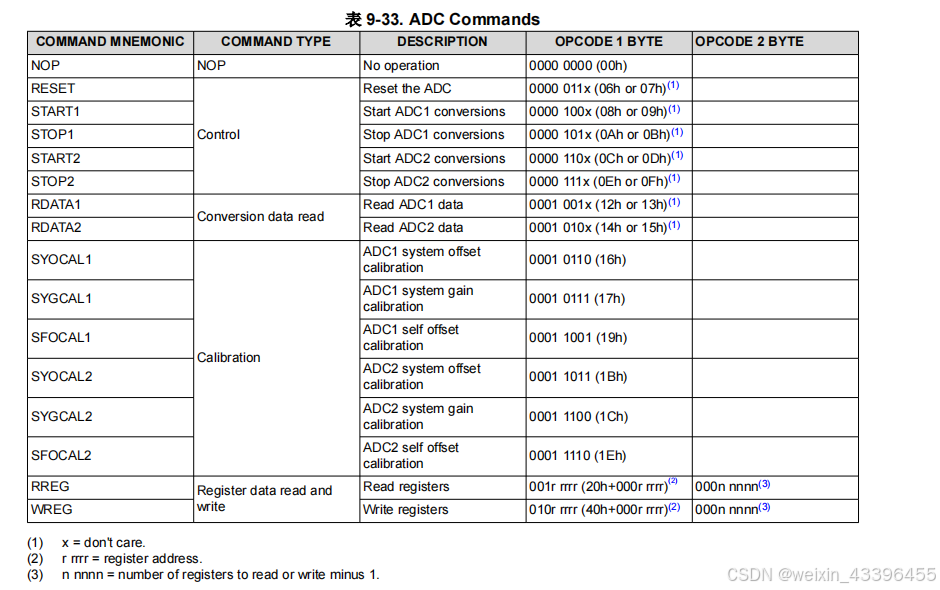
这里主要说明写命令。
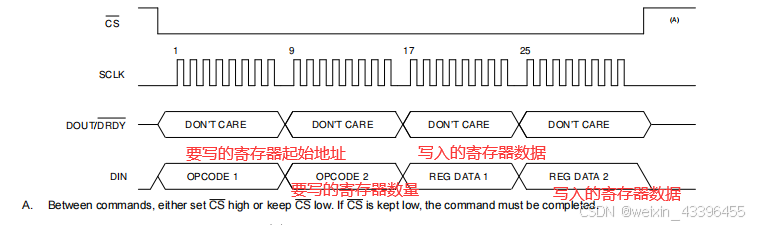
WREG操作码由多个字节组成。
第一个字节指定起始寄存器地址: 010r rrrr,其中r rrrr是起始寄存器地址。
第二个操作码字节是要写的寄存器数量(减1):000n nnnn,其中n nnnn是要写的寄存器数减1。接下来的字节是要写的寄存器数据。
如果字节数超过最后一个寄存器地址,ADC将忽略数据(地址指针不封装)。将新数据写入某些寄存器会导致重置ADC1或ADC2转换,如在寄存器映射中的ADC重启列中所指定的那样。重新启动时清除先前的转换数据。
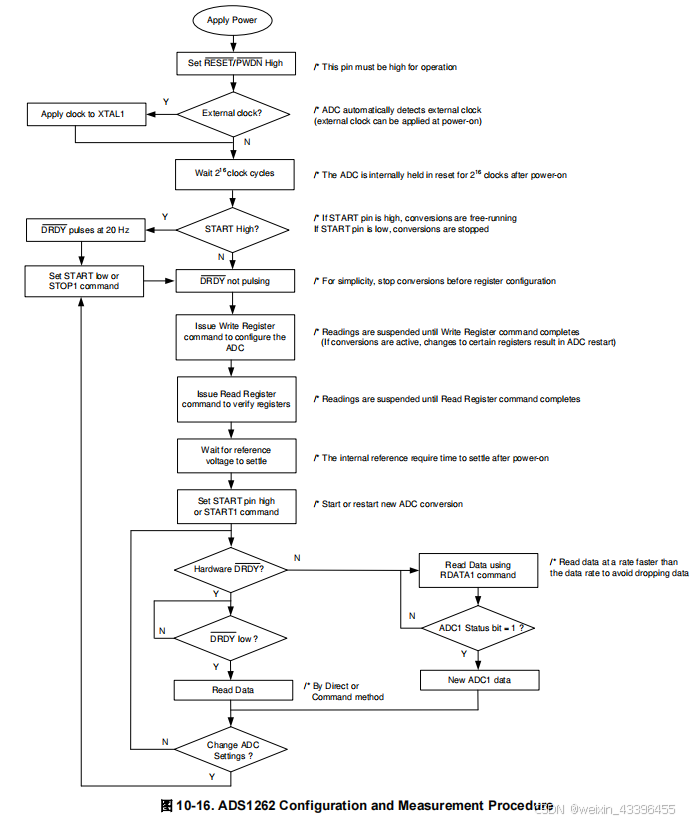
三、初始化设置
四、寄存器校准
偏移自校准命令可校正内部ADC1偏移错误。将ADC1输入多路复用器寄存器(INPMUX)编程到FFh,以在发送命令之前强制打开所有输入连接。当发送SFOCAL1自校准命令时,ADC短路内部PGA输入,然后平均16个读数,以减少转换噪声,以实现精确校准。校准完成后,将将校准结果写入24位偏移校准寄存器(OFCAL[2:0])。校准后,将输入多路复用器设置为所需的测量通道。在切割模式下禁用偏移校准寄存器。
void ADCCalibration(void)
{
CS_RESET;
ADS1262_W(0x46);
ADS1262_W(0x00);
ADS1262_W(0xFF);
CS_SET;
START_SET;
CS_RESET;
ADS1262_W(0x19);
Delaytime(1);
CS_SET;
}五、参考代码
void ADS1262_CONF(void)
{
CS_RESET;
ADS1262_W(0x42);/*确定寄存器起始地址*/
ADS1262_W(0x04);/*确定要写的寄存器数量:4+1=5*/
ADS1262_W(0x00);/*写寄存器02*/
ADS1262_W(0x00);/*写寄存器03*/
ADS1262_W(0x00);/*写寄存器04*/
ADS1262_W(0x05);/*写寄存器05:PGA Gain:1 ;Data Rate:50SPS*/
ADS1262_W(0x98);/*写寄存器06*/
CS_SET;
}
















 3424
3424

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









