






深入理解C++中的锁机制
摘要
在多线程编程中,正确使用锁机制是确保数据同步和线程安全的关键。
C++提供了多种锁机制,如互斥锁、读写锁、自旋锁等。
本文将深入探讨这些锁机制的原理、适用场景以及使用方法,帮助读者更好地理解和应用C++中的锁机制。
正文
介绍
在并发编程中,多个线程同时访问共享数据可能引发数据竞争和不确定行为。
为了解决这个问题,C++提供了锁机制,用于保护共享数据的访问。
互斥锁
互斥锁是C++中最常用的锁机制之一。它通过在代码块中设置互斥锁,确保同一时间只有一个线程可以执行该代码块。当一个线程获取到互斥锁后,其他线程将被阻塞,直到该线程释放锁。
实例:
当使用C++的标准库时,我们可以使用std::mutex来实现互斥锁。
比如:
#include <iostream>
#include <thread>
#include <mutex>
std::mutex mtx; // 创建一个互斥锁对象
void printMessage(const std::string& message)
{
std::lock_guard<std::mutex> lock(mtx); // 在需要互斥访问的代码块中使用lock_guard自动获取和释放锁
// 互斥访问的代码
for (int i = 0; i < 5; ++i)
{
std::cout << message << std::endl;
}
}
int main()
{
std::thread t1(printMessage, "Hello from thread 1");
std::thread t2(printMessage, "Hello from thread 2");
t1.join();
t2.join();
return 0;
}
怎么理解呢?
在这个示例中,我们创建了一个std::mutex对象mtx,然后在printMessage函数中使用std::lock_guard来自动获取和释放锁。
std::lock_guard是一个RAII(Resource Acquisition Is Initialization)类,它在构造时获取锁,在析构时释放锁,确保异常安全性。
在main函数中,我们创建了两个线程t1和t2,它们分别调用printMessage函数,并传递不同的消息作为参数。
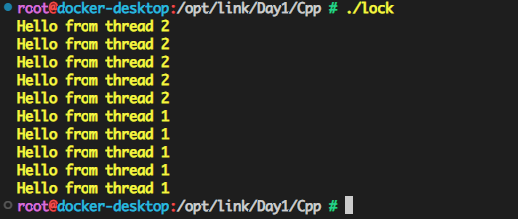
由于我们在printMessage函数中使用了互斥锁,所以每个线程都会按顺序打印自己的消息,而不会产生竞争条件。
运行上面的代码,我们会看到两个线程分别打印出自己的消息,而不会交叉混杂。
读写锁
读写锁是另一种常见的锁机制,用于在读操作和写操作之间进行权衡。读写锁允许多个线程同时进行读操作,但在写操作时需要独占访问。这可以提高读多写少场景下的并发性能。
实例:
当使用C++的标准库时,我们用std::shared_mutex来实现读写锁。
比如:
#include <iostream>
#include <thread>
#include <shared_mutex>
std::shared_mutex rwMutex; // 创建一个读写锁对象
int sharedData = 0; // 共享数据
void readData()
{
std::shared_lock<std::shared_mutex> lock(rwMutex); // 获取读锁
// 读取共享数据
std::cout << "Reading shared data: " << sharedData << std::endl;
}
void writeData(int newData)
{
std::lock_guard<std::shared_mutex> lock(rwMutex); // 获取写锁
// 更新共享数据
sharedData = newData;
std::cout << "Writing shared data: " << sharedData << std::endl;
}
int main()
{
std::thread t1(readData);
std::thread t2(readData);
std::thread t3(writeData, 42);
t1.join();
t2.join();
t3.join();
return 0;
}
这又怎么理解呢?
在这个示例中,我们创建了一个std::shared_mutex对象rwMutex,然后在readData函数中使用std::shared_lock获取读锁,而在writeData函数中使用std::lock_guard获取写锁。
在main函数中,我们创建了三个线程:t1和t2都是读线程,它们调用readData函数来读取共享数据;
t3是写线程,它调用writeData函数来更新共享数据。
读线程可以同时获取读锁,允许多个线程同时读取共享数据,而写线程在获取写锁时会阻塞其他线程的读和写操作,确保数据的独占访问。
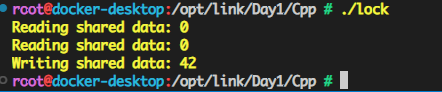
运行上述代码,你会看到两个读线程同时读取共享数据,而写线程在获取写锁后更新共享数据。
读线程和写线程之间实现了一定的并发性。
自旋锁
自旋锁是一种特殊的锁机制,它不会将等待线程阻塞,而是通过忙等待的方式不断尝试获取锁。
自旋锁适用于锁竞争时间短暂的情况,避免了线程切换的开销。
条件变量
条件变量用于在多个线程之间进行通信和同步。
它提供了一种线程等待某个特定条件的机制,当条件满足时,其他线程可以通过通知来唤醒等待的线程。
死锁和竞态条件
在使用锁机制时,需要注意死锁和竞态条件的问题。
死锁指的是两个或多个线程互相等待对方释放锁,导致程序无法继续执行。
竞态条件则是多个线程在没有合适同步的情况下,对共享数据进行读写操作,导致结果的不确定性。
最佳实践和常见问题
在使用锁机制时,有一些最佳实践可以遵循。
例如,尽量减小锁的粒度,避免过多的锁嵌套,合理选择锁的类型等。
此外,还会介绍一些常见的问题和解决方法,如死锁的避免策略和性能优化技巧等。
结论
通过本文的介绍,我们深入了解了C++中的锁机制,包括互斥锁、读写锁、自旋锁和条件变量。我们学习了它们的原理、适用场景以及使用方法。
合理地使用锁机制可以确保数据同步和线程安全,提高多线程程序的性能和稳定性。
希望本文对读者在C++多线程编程中理解和应用锁机制有所帮助。
如果有任何问题或建议,欢迎留言讨论。
参考资料:
[1] C++ Reference: Mutex. https://en.cppreference.com/w/cpp/thread/mutex
[2] C++ Reference: Read-write mutex. https://en.cppreference.com/w/cpp/thread/shared_mutex
[3] C++ Reference: Spin lock. https://en.cppreference.com/w/cpp/atomic/atomic_flag
[4] C++ Reference: Condition variable. https://en.cppreference.com/w/cpp/thread/condition_variable
[5] Scott Meyers. Effective Modern C++. O’Reilly Media, 2014.
[6] Anthony Williams. C++ Concurrency in Action. Manning Publications, 2019.















 4671
4671











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









