







“基于SLAM导航的智能小车控制系统研究”毕业设计,高分资源,匠心制作,查重5%,下载可用。强烈推荐!!!
摘要
智能小车作为一种重要的移动机器人应用形式,被广泛应用于自动化仓储、智能巡检、无人配送等领域。其自主导航能力是保障其在复杂环境下高效执行任务的关键之一。传统的智能小车控制系统通常采用预先构建的地图和外部定位系统进行导航,但其受制于先验地图和GPS信号的限制。因此,亟需研究基于SLAM的智能小车。
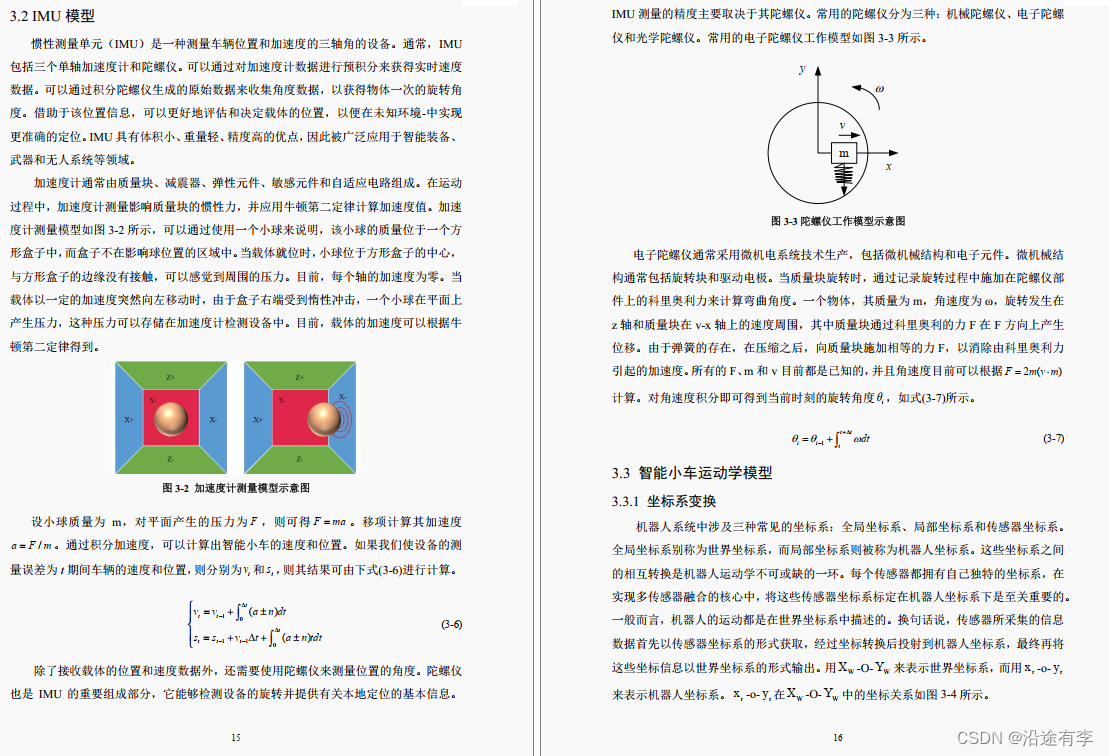
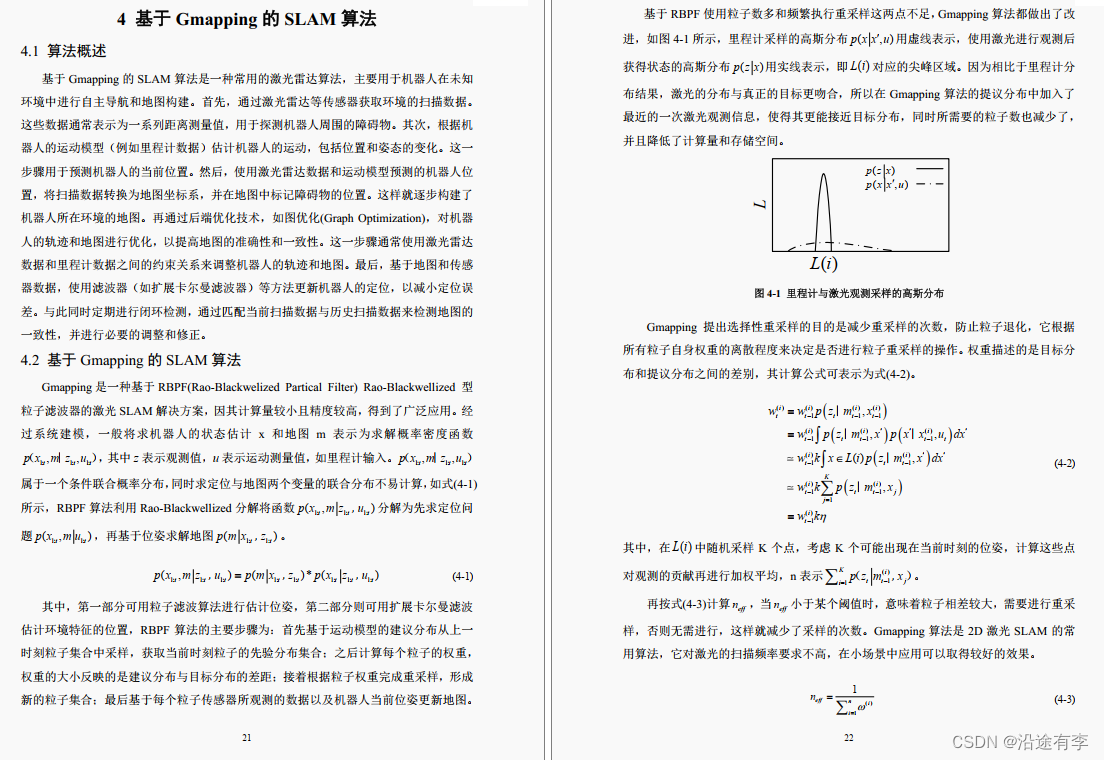
本文首先分析了智能小车的机械结构和控制系统结构,考虑了成本、性能等因素,优化选择了各个模块,确保了系统设计的合理性和可行性。其次,通过建立激光雷达的测量模型和智能小车的运动学模型,为后续的算法设计和控制策略奠定了基础。然后,简要介绍了基于Gmapping的定位与地图构建算法(Simultaneous Localization and Mapping, SLAM),并进一步分析了SLAM算法和传感器数据融合算法。最后,对硬件系统的详细介绍。验证了系统设计的可行性,并证明了智能小车能够实现自主导航和自主避障。
本文的工作能够为智能小车控制算法的研究和实现提供了重要的参考和借鉴,同时也为未来的研究提供了方向和思路,可以进一步优化算法和系统设计,提高系统的性能和可靠性,探索更广泛的应用领域。
关键词
智能小车;ROS;SLAM;路径规划
目录
部分截图
免费,免费,免费下载,需要的可以联系。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









