







 本文探讨了欠驱动机器人在动力学规划和控制中的挑战与优势,对比了传统控制理论与最优控制策略。内容涵盖本田ASIMO与被动动态步行者、鸟类与现代飞机的区别,以及工业机械臂的局限性。欠驱动系统定义为输入受限或状态控制不可直接实现的系统,并通过双摆系统实例讲解了反馈等效。最后,讨论了输入和状态约束、非完整约束等问题,指出许多机器人如足式机器人和部分机械臂都属于欠驱动系统。
本文探讨了欠驱动机器人在动力学规划和控制中的挑战与优势,对比了传统控制理论与最优控制策略。内容涵盖本田ASIMO与被动动态步行者、鸟类与现代飞机的区别,以及工业机械臂的局限性。欠驱动系统定义为输入受限或状态控制不可直接实现的系统,并通过双摆系统实例讲解了反馈等效。最后,讨论了输入和状态约束、非完整约束等问题,指出许多机器人如足式机器人和部分机械臂都属于欠驱动系统。
1. Introduction
最近因为目前的项目中,可能会用到一些基于动力学的planning 和control的算法,看了一下MIT欠驱动机器人的课程,通过记笔记的方式帮助自己查缺补漏。笔记基本上按照讲课的顺序进行梳理,穿插一些在matlab上实现的结果和个人的理解。
2 Motivation
2.1.1 Honda ASIMO vs passive dynamic walkers
ASIMO机器人的几大问题:
1)动作表现的想不了解自己的动力学;
2)使用高增益去follow desire trajectory(位置环控制),导致能量损失很大;
3)只在一个很小的状态空间中是稳定的,导致了速度、效率远低于人类;
美国在上世纪八十年代搞出来的Passive dynamic walker(PDW), 表现的更像了人类。
2.1.2 Birds vs modern aircraft
人类的航天技术已经发展的很成熟了,但是距离鸟类代差是非常明显的。人类走的路线是非常强劲的发动机动力+动力学设计,和鸟类的代差是:
1)鸟类的能量效率非常高,飞几千公里也不怎么需要能量;
2)鸟类的操控性特别强,转向速度快;
3)对鸟类的数据研究相对困难,人类通过研究类似的海洋生物,它们的动力学性能令人惊叹。
2.1.3 manipulation
工业机械臂的发展和航天技术的发展类似,机械臂还无法帮助人类完成基础的家务。对于抓取任务,当前主流采用的pipeline为:1)设置机械臂上的抓取点;2)移动到预抓取点;3)进行盲抓。因为没有通过和物体接触去辨识物体动力学,导致很多动力学接触的抓取任务,容易失败。
2.1.4 总结
传统控制理论通过反馈去克服机器自身的动力学,控制工程师不愿意把情况搞定复杂。对于无驱动或者是驱动力受限的情况,工程师不得不考虑系统的动力学,合理的利用动力学则能改善系统的效率、灵活度和鲁棒性。最优控制提供一条可行的方案,现实中的非线性系统则是一个拦路虎。
2.2 动力学系统定义
对于大部分的动力学系统(机械、液压、电气系统)的一般定义为一个二阶系统:
q
¨
=
f
(
q
,
q
˙
,
u
,
t
)
\ddot{q} = f(q,\dot{q}, u, t)
q¨=f(q,q˙,u,t)
大部分系统可以写成affine 形式:
q
¨
=
f
1
(
q
,
q
˙
,
t
)
+
f
2
(
q
,
q
˙
,
t
)
u
\ddot{q}=f_1(q,\dot{q},t)+f_2(q,\dot{q},t)u
q¨=f1(q,q˙,t)+f2(q,q˙,t)u
两种情况下,系统可以看成是欠驱动的。欠驱动系统可以看成我想控制机器人系统中的某些状态量,但是无法直接控制,需要通过系统整体的力学,通过 状态方程关联(力学传导) 的方式进行控制。
1)
d
i
m
(
f
2
(
q
,
q
˙
,
t
)
)
<
d
i
m
(
q
)
dim(f_2(q,\dot{q},t))<dim(q)
dim(f2(q,q˙,t))<dim(q),驱动关节小于状态的自由度;
机械臂处于singularity时,不能算欠驱动的;
机械臂的虽然有限位,但是它也不需要使用限位的工作空间,这种也不算欠驱动系统;
2)输入u是受限的;
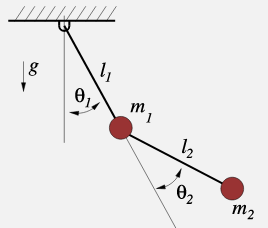
- double pendulum system
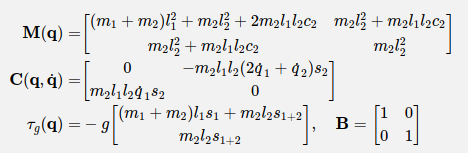
对于典型的倒立摆系统,动力学方程可以写成:
M ( q ) q ¨ + c ( q , q ˙ ) q ˙ = τ g ( q ) + B u M(q)\ddot{q}+c(q,\dot{q})\dot{q}=\tau_g(q)+Bu M(q)q¨+c(q,q˙)q˙=τg(q)+Bu
完整的动力学方程如下:
判别是否是欠驱动系统:
q
¨
=
M
−
1
(
q
)
[
τ
g
(
q
)
+
B
u
−
C
(
q
,
q
˙
)
q
˙
]
\ddot{q}=M^{-1}(q)[\tau_g(q)+Bu-C(q,\dot{q})\dot{q}]
q¨=M−1(q)[τg(q)+Bu−C(q,q˙)q˙]
M − 1 ( q ) M^{-1}(q) M−1(q)是满秩的,只有B是满秩的,机械臂系统才是一个全驱动系统。
问题1: 欠驱动和机械臂奇异点(singularity)的关系。
奇异点关注是末端的受力。
F
=
J
∗
τ
F = J * \tau
F=J∗τ
机械臂处于奇异点是,jacobian矩阵的秩降低,导致末端的受力在某个方向上不可控。
问题2:检验动力学公式。
使用simscape multi-body检验动力学公式是否正确,如果公式错误就不断减少影响因素(重力加速度、阻尼项、角度)
关节的摩擦阻力可以看成是外界的扰动力,在控制力基础上-b*w
2.3 feedback equivalence
对于最简单的连杆机器人,都存在着非线性,如上面double pendulum的动力学方程。先来看全驱动机器人能怎么处理这种非线性。
u
=
π
(
q
,
q
˙
,
t
)
=
f
2
−
1
(
q
,
q
˙
,
t
)
[
u
′
−
f
1
(
q
,
q
˙
,
t
)
]
q
¨
=
u
′
\begin{aligned} u &= \pi(q, \dot{q}, t)=f_2^{-1}(q,\dot{q},t)[u'-f_1(q,\dot{q},t)] \\ \ddot{q} &= u' \end{aligned}
uq¨=π(q,q˙,t)=f2−1(q,q˙,t)[u′−f1(q,q˙,t)]=u′
u’可以看成是间接的输入,想要系统实现什么样的加速度,就给什么样的u’,再根据已有的模型,推算实际的输入u。
1)精确的模型,消除了非线性的因素,通过换算消除了非线性;
2)
d
i
m
(
f
2
)
=
d
i
m
(
q
)
dim(f_2)=dim(q)
dim(f2)=dim(q),但是
f
2
f_2
f2不是square,
f
2
f_2
f2的解不是唯一,是一个解集空间,再继续发展可以搞出分级控制。
- feedback cancellation on the double pendulum
希望double pendulum 表现的像单个倒立摆,也就是说 q 2 ¨ = 0 \ddot{q_2}=0 q2¨=0
1)步骤1:计算u’: 现在是个线性控制器,直接把PID搬上来,不用反馈控制器当然是无法做到稳定的表现的像一个单杆。
u ′ = − k p ∗ θ − k d ∗ θ ˙ u'=-k_p * \theta -k_d*\dot{\theta} u′=−kp∗θ−kd∗θ˙
2)步骤2:计算实际的u;
u = B − 1 ∗ ( M ∗ u ′ − τ + C ∗ q ˙ ) u = B^{-1}*(M*u'-\tau+C*\dot{q}) u=B−1∗(M∗u′−τ+C∗q˙)
全驱动系统可以看成是 q ¨ = u ′ \ddot{q}=u' q¨=u′,但是欠驱动系统就要复杂的多。
2.4 Input and state constraints
工程实际中,往往某个关节缺少驱动源的情况较少,更多的情况是:驱动源的驱动能力受限;状态空间中很多地方是不安全的也受限。这两种情况都会导致控制器的输入维度降低,进而造成一种欠驱动的情况。
2.4.1 Nonholonomic constraints
- 非完整约束一般描述环境对机器的限制,如差速轮系统,无法直接产生侧向移动,但是它的位置空间的维度并没有降低(仍然是想去哪就去哪)。 非完整约束的代数形式为:
ϕ ( q , q ˙ , t ) = 0 \phi(q,\dot{q},t)=0 ϕ(q,q˙,t)=0 - 完整约束 holonomic constraints
环境对机器的约束加强了,位置空间上的很多位置是去不了的,例如火车的轨道。
ϕ ( q , t ) = 0 \phi(q,t)=0 ϕ(q,t)=0
2.5 Underactuated robotics
很多机器人都是欠驱动系统
1)足式机器人,足式机器人的状态一般描述为关节+主体的6个自由度,所以是欠驱动的;
2)仿真鱼和昆虫机器人,情况和足式机器人一样,都需要通过关节间接的控制身体。
3)机械臂,一般来讲末端的物体有6个自由度,如果关节数目小于6,也符合欠驱动机器人的定义了。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









