






问题描述:
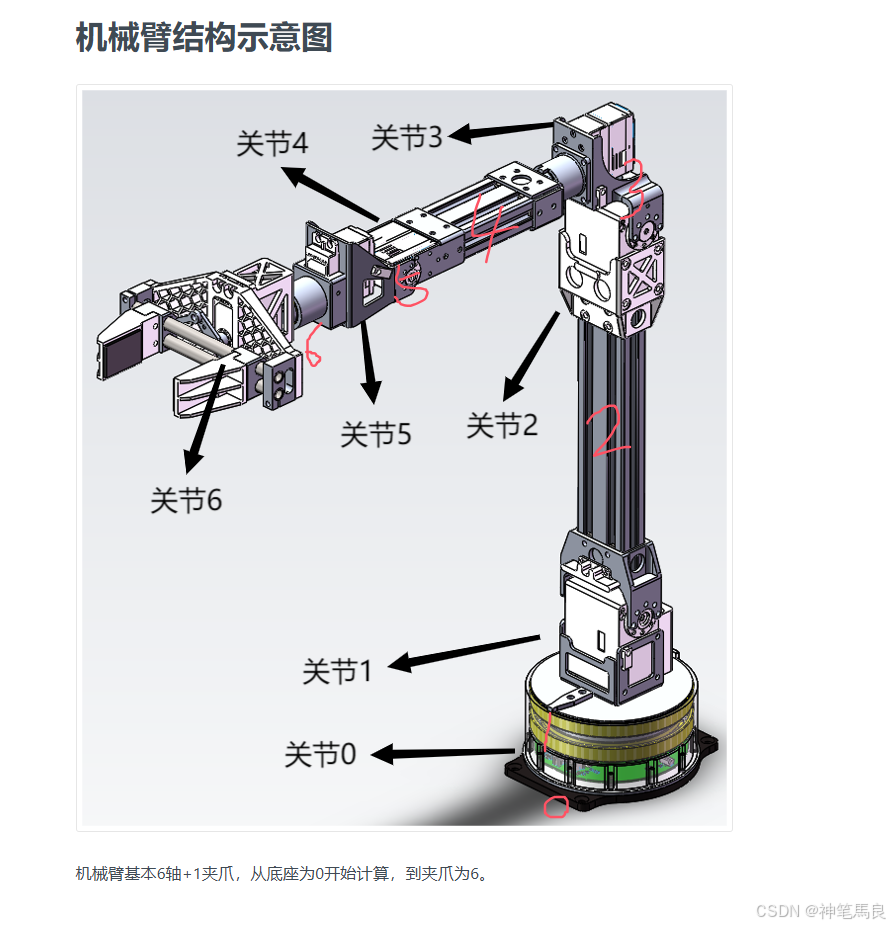
机械臂基本6轴+1夹爪,从底座为0开始计算,到夹爪为6。这里的轴指的是什么呢?
问题解答:
- 基本概念
- 串联机械臂是由一系列连杆通过关节连接而成的机械结构。关节是允许连杆之间相对运动的连接部分,而连杆则是连接关节的刚体部分。
- 数量关系
- 对于一个串联机械臂,关节数量()和连杆数量()的关系是:连杆数量比关节数量多 1,即。
- 例如,一个具有 3 个关节的串联机械臂,它会有 4 个连杆。这是因为第一个连杆通常是固定在基座上,然后每个关节连接相邻的两个连杆,最后一个连杆位于机械臂的末端。
- 从运动学角度理解,每个关节的运动都会导致相连的连杆位置和姿态发生变化,而连杆的数量决定了机械臂的结构长度和末端执行器能够到达的空间范围。更多的连杆和关节可以使机械臂具有更高的灵活性和更大的工作空间,但同时也会增加机械臂的复杂性和控制难度。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











