






问题描述:
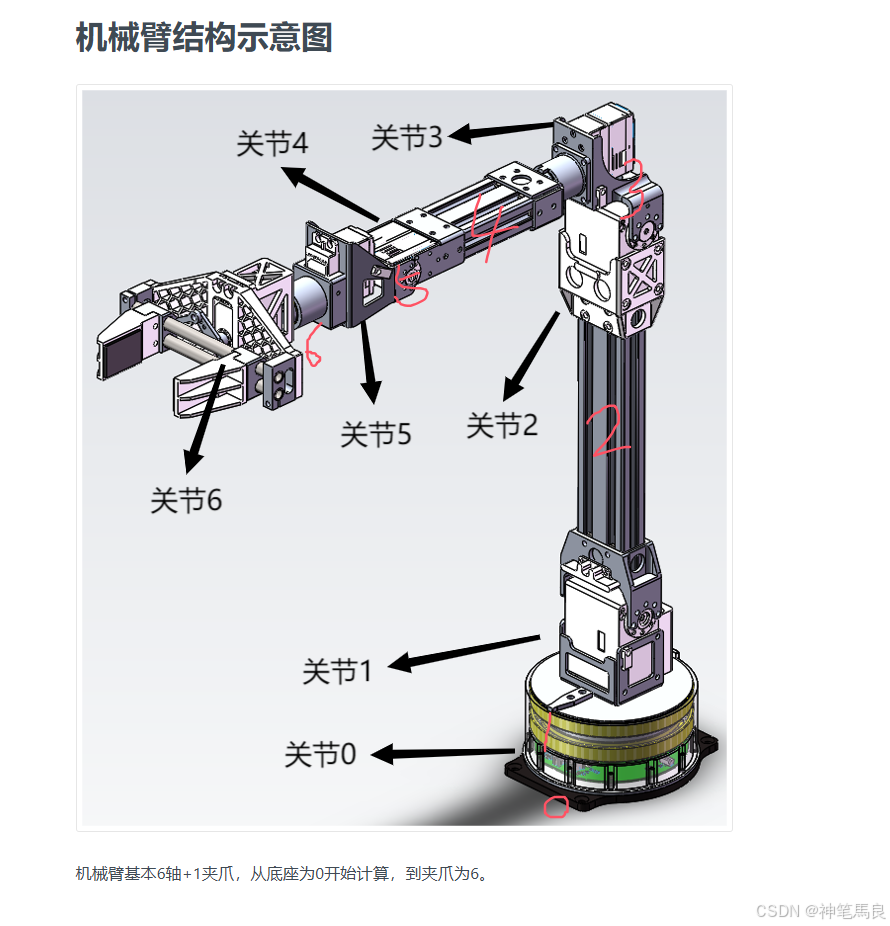
机械臂基本6轴+1夹爪,从底座为0开始计算,到夹爪为6。这里的轴指的是什么呢?
问题解答:
- 轴的定义
- 在机械臂的语境中,“轴” 等同于 “关节”。这些轴(关节)是机械臂能够灵活运动的关键部分,每个轴都允许机械臂在特定方向上进行旋转或平移运动。
- 六轴机械臂运动方式
- 轴 0(底座关节):通常可以让机械臂进行旋转,一般是绕着垂直于地面的轴旋转,这个旋转运动可以改变机械臂整体在水平面上的方位,就像你转动自己的身体一样。
- 轴 1 - 轴 5:这几个轴的运动方式比较复杂,它们相互配合来控制机械臂的姿态和位置。其中一些轴可以让机械臂进行上下俯仰运动,就像人的手臂在肩膀处上下摆动;还有些轴可以让机械臂进行左右摆动,类似人的手臂在肘关节处左右摆动。通过这几个轴的协同运动,机械臂能够精确地定位到三维空间中的某一点。
- 夹爪(末端执行器):虽然在轴的编号中它是第 6 个,但它本身不是一个轴。夹爪主要用于抓取和操作物体,它的运动方式根据夹爪的类型而不同,比如平行夹爪是通过两个手指的开合来抓取物体,真空夹爪则是利用真空吸附来抓取物体。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











