




摘要
本文介绍了一种基于MASt3R的实时单目密集SLAM系统,该系统能够在野外视频序列中实现稳定运行,并且不需要对相机模型做出任何假设。作者提出了点图匹配、相机跟踪和局部融合、图构造和环闭合以及二阶全局优化等高效方法。通过已知校准,对该系统的简单修改可以使其在各种基准测试中达到最先进的性能。总之,本文提出了一种易于使用的单目SLAM系统,能够产生全局一致的位置和密集几何形状,并以每秒15帧的速度运行。
项目地址:https://edexheim.github.io/mast3r-slam/
开源地址:comming soon~
论文方法
方法描述
本文提出的深度学习SLAM算法名为DUSt3R(Deep Unsupervised SLAM),该算法主要由MASt3R预测和点映射匹配、跟踪和局部融合、环闭合以及全局优化等组件组成。首先,通过网络预测出每个像素在图像中的深度值,并将其转换为向量表示。然后,使用这些向量作为输入,在两个相邻帧之间进行点映射匹配。接下来,利用匹配结果来估计相机的位姿,并将新的点映射与之前的点映射进行融合。最后,使用循环闭合技术来进一步提高地图的准确性。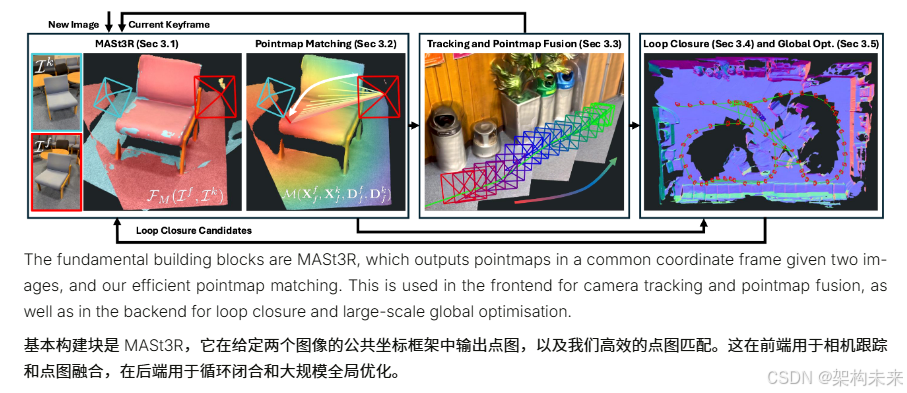
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











